簡統化微機柜設計及特點
2022-03-24 02:34:46戴仁德劉曉柔
長沙大學學報 2022年2期
戴仁德,劉曉柔
(1.湖南中大設計院有限公司,湖南 長沙 410018;2.長沙學院審計處,湖南 長沙 410022)
隨著各個時期電子元器件的發展,以及新技術、新工藝的出現,韶山系列交直傳動電力機車控制技術經歷了純模擬電路控制、數模電路混合控制、引進微機系統控制,以及后來的電子元器件表貼新工藝改進四個階段[1]。我國交直傳動電力機車控制領域存在多種模式的控制裝置,這給產品的生產及運用維護帶來了諸多不便。而在鐵路跨越式發展新思路下,鐵道裝備技術面臨“四化”(即“標準化、系列化、模塊化、信息化”)的新要求,將交直傳動電力機車控制裝置簡統化為一種通用產品已成為必然趨勢。
TPY 型簡統化微機柜是研究人員對幾代交直機車控制系統(包括引進的控制系統)進行歸納總結并取長補短后,采用當前高性能器件、新的控制技術自主研發的交直機車控制裝置,完全滿足當前對鐵道裝備技術提出的“四化”要求,也能滿足用戶多樣化需求。
1 簡統化微機柜設計思路
TPY 簡統化微機控制柜作為原電子柜與微機柜的技術升級產品,其安裝尺寸和原控制柜保持一致,對外接口兼容,保證了整柜的互換性。插件箱模塊做到硬件通用,并采用A、B 兩組完全相同的模塊進行冷備份,其配置的資源可以滿足所有交直型電力機車控制的需要。
TPY 系列簡統化微機控制柜由機車控制板、數字IO 板、脈沖分配板、轉換控制板、記錄診斷板、背板等部分組成。其中機車控制板為核心控制模塊,采用了DSP+ARM 雙CPU 架構,由DSP 管理系統總線及機車控制功能,ARM 處理器管理機車狀態信息的記錄、診斷、數據通信與轉儲等,板內邏輯及外圍信號的采集與預處理由FPGA 控制管理并行完成。而將相對較獨立且僅為部分交直傳動電力機車所選用的功率因數補償控制系統歸為可選功能模塊。
TPY 簡統化微機控制系統如圖1 所示,其系統軟件的設計采用分層與模塊化的設計理念,由平臺的底層軟件完成信號的采集與預處理、系統總線與時序管理等,在此基礎上按具體車型的控制需求開發相應的控制功能模塊,最終構成應用軟件系統。
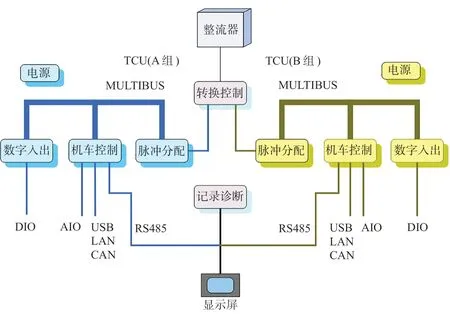
圖1 簡統化微機控制系統
1.1 機車控制板
機車控制板選用通用型6U 標準插件,通過AMS 總線與系統連接,是TES06 微機控制系統平臺的基本硬件之一。機車控制插件作為一個交直機車控制系統的核心功能模塊,基于基本的軟硬件平臺,通過訪問本板及系統中外圍資源,可方便實現交直機車控制系統、LCU 控制系統以及與外部系統通信等功能,主要包括以下部分:
(1)44 路模擬量輸入:其中有1 路用于AD 芯片自檢,1 路用來配合DA 芯片的自檢,輸入幅值為-10~+10V,采用200μs 的采樣周期,即對應工頻信號每個周期100 個采樣點。
(2)12 路模擬量輸出:輸出幅值-10~+10V,周期為1ms。
(3)4 路RS485 通信口:以FPGA 實現4 路RS485 串行接口。
(4)1 路CAN 口:ARM 本身提供CAN 總線接口,通過光電隔離后送CAN 接口芯片。
(5)1 路以太網口:符合IEEE802.3/802.U-100Base-Tx/10Base-T 規范,可作為外部網絡接口或用于調試、故障數據下載等。
(6)1 路USB 高速從口:符合USB2.0 規格,并支持USB OTG(On-The-Go)外設功能,具有OTG 外設的對話請求協議(Session Request Protocol,SRP)功能,還可以直接連接到OTG雙重角色設備上,這種高速的USB 接口可實現與PC 連接,具備高達480Mbit/s 的傳輸速率,使在線數據實現波形監測。
(7)1 路USB 全速OTG 口:OTG 控制器完全兼容USB2.0 及OTG Supplement 1.0 協議,主機和設備控制器兼容USB2.0 協議,并支持12Mbit/s 的全速傳輸和1.5Mbit/s 的低速傳輸,通過U 盤可以從ARM 控制器轉儲重要的運行數據,同時也可以從U 盤讀取數據修改系統運行參數或加載DSP 的運行程序。
(8)6 路速度信號輸入:峰值為0~10V 的方波,頻率范圍為0~4.244kHz,即0~300km/h,輸出值單位為0.01km/h。(9)IEEE796 多總線接口(電氣)以及較全面的信號指示功能。
1.2 數字IO 板
數字IO 插件通過多總線與機車控制插件交換信息,多總線接口即用于完成這一功能。該部分功能邏輯由可編程邏輯器件CPLD 完成。主要實現功能如下:
(1)機車控制插件通過總線發送對應地址信號,讀取數字IO 插件的接口狀態信號,數字IO 插件接口邏輯器件CPLD 完成地址譯碼,選中該插件及對應通道組合,在讀取等控制信號的配合下取得外部數字量信號。
(2)機車控制插件通過總線發送對應地址信號,將數字信號寫入到數字IO 插件的外部輸出通道,數字IO 插件接口邏輯器件CPLD 完成地址譯碼,選中對應輸出通道組合,完成寫入及信號調制等功能。
1.3 轉換控制板
轉換控制插件是通用型6U 標準插件,主要實現功能如下:
(1)提供14 路信號的轉換功能。
(2)具備10 路反饋信號的采樣功能,提供給控制系統調整及A/D 變換后進行控制運算。
(3)具有9 路反饋采樣信號的調整與取最值功能。
(4)具有電源信號的轉換與分配、短路智能保護等功能。
1.4 脈沖分配板
脈沖分配插件主要包括AD 采樣電路、脈沖驅動轉換電路、與AMS 總線的接口電路、電源子系統、調制解調電路。
脈沖分配插件是通用型6U 標準插件,主要是作為AMS 總線與系統的接口。主要實現功能包括:2 路50Hz、8V 峰值的正弦波網壓;AMS-Bus 中的總線讀、總線寫、多路地址選擇、總線復位、12 位雙向數據總線;10 路并列獨立脈沖輸出;1 路解調輸入、1 路調制輸出。
2 簡統化微機柜設計技術要點
簡統化微機柜在提高系統的可靠性方面進行了一些改進與創新設計。
2.1 系統采用完全相同的A、B 兩組進行冷備份冗余,提高可靠性
在設計規劃時,文章將一些可選功能模塊或擴展功能模塊與主傳動系統的控制模塊分開,使A、B兩組控制模塊完全集成在一個插件箱中,系統布置更加緊湊、合理,柜體布線及插件箱布線相比原控制柜減少許多,可靠性提高。
2.2 插件箱布線的工藝改進
插件箱插件間連線采用PCB 母板,取消原繞接布線,解決由于機車提速震動加劇和布線密度增加造成的繞接線破損以及散熱不良導致的故障問題[2],同時改人工繞接布線提升了機器的生產效率和減少了出錯率。
2.3 機車控制核心模塊優化設計提高可靠性
機車控制插件采用ARM、DSP、FPGA 等最先進技術組成取代原80186 微機構成的MICAS 系統,解決系統陳舊和系統死機問題,提高可靠性。此外采用FPGA 專門負責數據的采集,ARM 處理器負責處理記錄、診斷、通信與轉儲等工作,使系統真正具備實現信息化的數字基礎。
2.4 脈沖形成與分配模塊的創新設計
(1)優化程序設計。完善了上層通信部分程序;修改了同步信號正負半波檢測程序,加入了濾波環節;脈沖輸出加入了濾波環節;加入了網壓過零保護區域與同步信號正負半波不同步的區域保護。
(2)優化了硬件設計。24V 輸入點加入濾波電容,加強脈沖放大部分抗干擾能力,避免升降弓對脈沖放大部分的影響;修改脈沖放大的部分弱電壓信號走線,并加強了該部分信號的驅動;修改了脈沖分配部分網壓信號濾波部分電容器件的參數,減少濾波參數的分散性。
這樣的設計簡化了電路,提高了抗干擾性,解決原有系統可能存在的由于誤脈沖輸出導致的機車竄車等故障[3]。
2.5 對調制解調功能模塊進行了優化設計
研究用硬件編程的方式實現對調制解調功能模塊的優化設計,簡化了電路,并保證了功放管開關轉換過程中可能出現的功放管同時導通,造成的110V 電源的短路故障。
2.6 防空轉、防滑控制系統的優化設計
由于主控系統采用了DSP、FPGA 等高性能的核心處理器和可編程邏輯器件,替代原80186微機構成的系統[4],提高了數據處理速度,保證了防空轉、防滑控制系統的實時性。結合原有防空轉、防滑控制系統在運用中出現的一些問題,文章從軟件上進行了優化設計,更好地發揮防空轉、防滑控制系統的作用,提升了機車在復雜線路條件下的黏著利用。
2.7 新型功率因數補償控制系統的優化設計
新型功率因數補償控制插件選用了高性能的ARM 微控制器作為核心處理器,對機車原邊電壓、電流進行采樣,通過專用電能計量芯片實現無功含量計算,實現對機車無功補償的高速實時、可靠安全控制,并從軟件上進行了優化設計,解決原有的一些問題,同時實現功補裝置的信息化。此外,脈沖放大電路借用了主傳動控制系統的脈沖放大創新電路,可靠性及抗干擾性提高。
2.8 新增或完善的部分功能
研究對系統的部分功能進行了新增或完善,具體如下:
(1)完善自檢及部分故障診斷、故障導向等功能,更具有實用性。
(2)從根本上解決現有機車電子柜/微機柜運行中出現的一些問題,如竄車、微機柜電流不平衡、一些故障信號誤顯示、調制解調限流電阻易燒損等[5]。
(3)采用完全相同的A、B 兩組冷備份冗余方式進行冗余,交叉重聯問題能得到徹底解決。
(4)增加蓄電池電壓的饋電檢測功能,并在顯示屏進行提示。
(5)對原采用模擬型電子柜的機車,增加司機室顯示屏,實現對輪徑設置、信號顯示等功能。
(6)在增加外部信號的情況下,預留了防逆電、輪沿噴油、蓄電池電壓過壓檢測等功能。
(7)預留了網絡車所需要的MVB 模塊接口。
3 簡統化微機柜特點
3.1 簡統化、模塊化、系列化特點
在簡統化微機控制系統的開發設計中,為貫徹好簡統化、模塊化、系列化的設計思想,文章在設計中充分總結了原電子柜/微機柜的設計長處,在功能模塊進一步合并簡化與通用的基礎上進行了規劃。
控制裝置仍采用柜體結構形式,包含兩個標準的84R 插件箱。在簡統化微機控制柜設計開發之前,所有模式的控制柜均沒有將主傳動系統的控制模塊與其他可選或擴展功能模塊(如功率因數補償控制系統、供電控制模塊等)嚴格分開[6]。在設計簡統化微機控制柜時,對其功能模塊進行了重新整合,將兩組主傳動系統控制模塊集成在一個插件箱中,而功能相對獨立的其他可選或擴展功能模塊則集成在另一個插件箱中,這樣插件箱模塊做到了硬件完全通用。插件布局如圖2 所示。
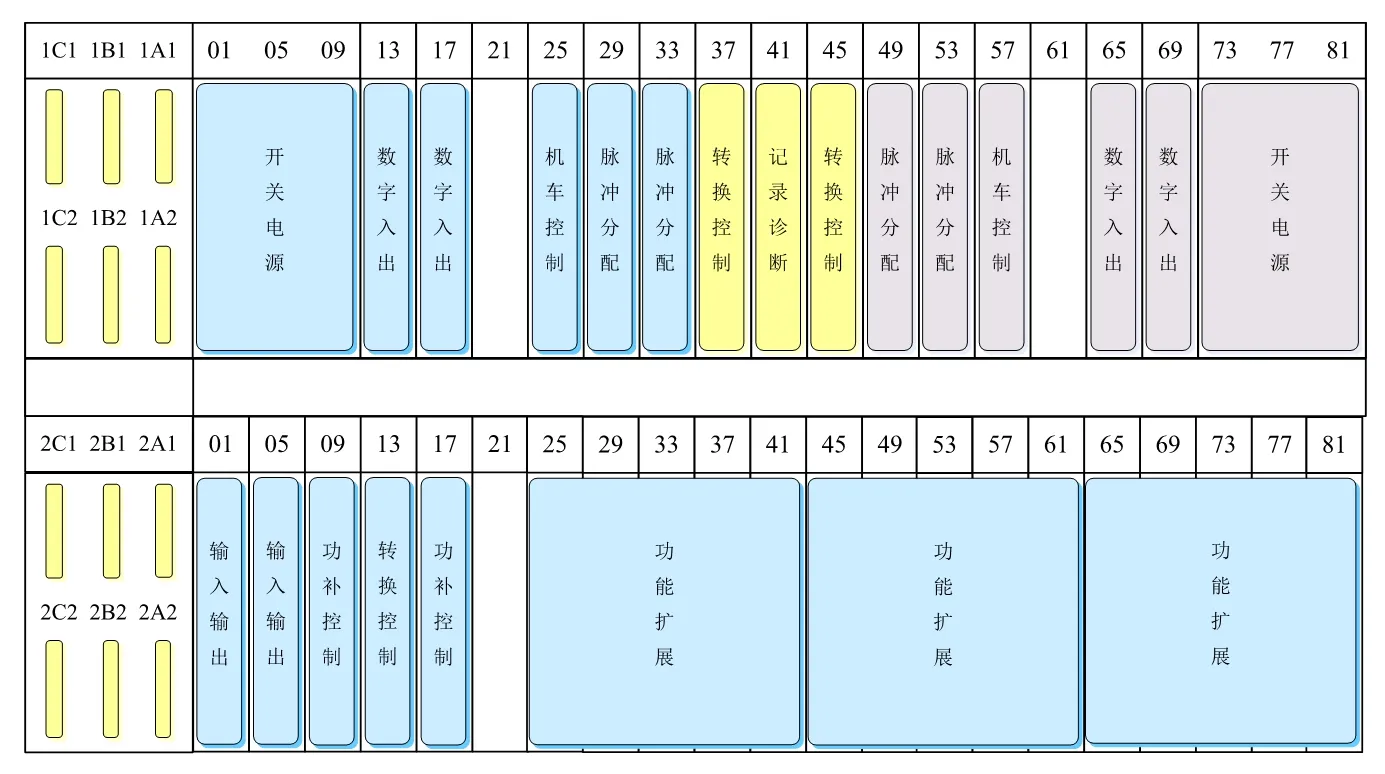
圖2 簡統化微機控制插件布局
在插件模塊方面,除通用的開關電源模塊以外,數模混合控制型的電子柜共包括50 多種插件模塊,微機柜包括14 種模塊[7],SMT 電子柜包括16 種模塊。而簡統化微機控制則僅設計了機車控制、數字入出、脈沖分配、轉換控制4 個主要模塊,以及功補控制、記錄診斷2 個可選模塊。
在設計完成各模塊的基礎上,依據各車型對控制的具體要求,文章開發了相應車型的應用軟件,形成了系列通用微機控制柜(見表1)。

表1 簡統化微機控制柜系列
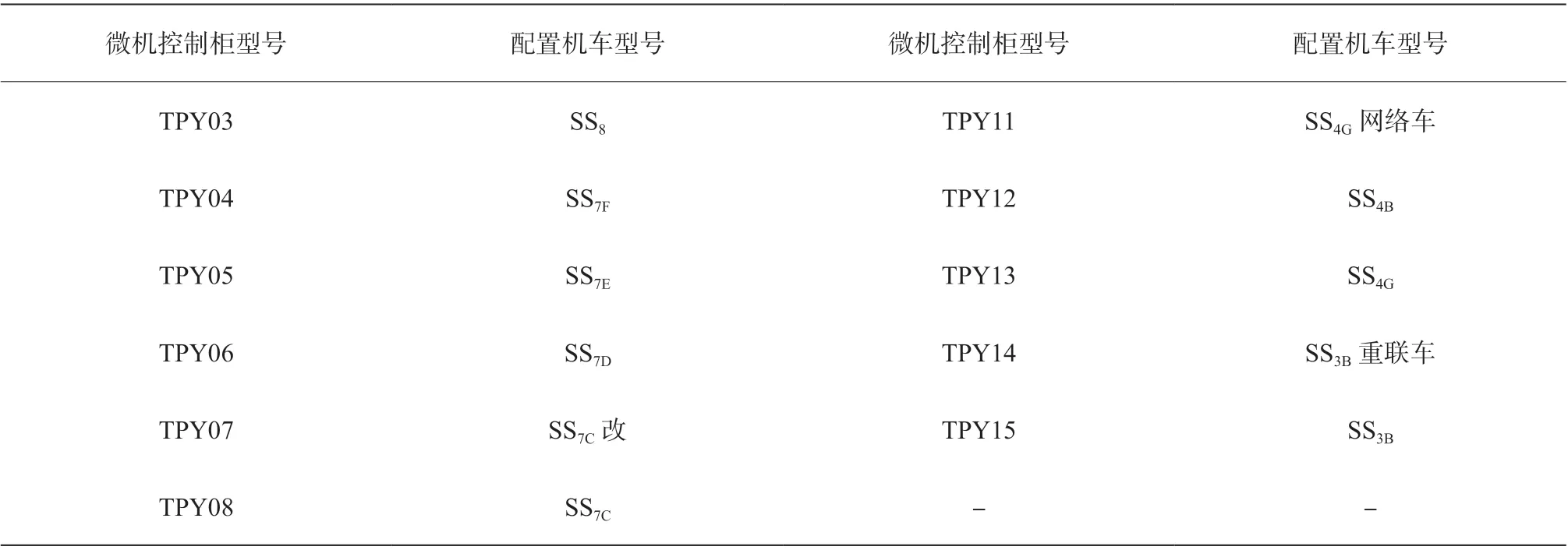
續表
3.2 信息化特點
電力機車的運行條件惡劣,用戶需要在機車運行的不同工作狀態下進行參數配置(包括調節機車的PI 參數),相當不方便。而以往調節PI 參數都是根據示波器觀察調節效果,以此來修改機車控制程序中PI 參數值,這意味著每次改動都需要修改控制程序,大大降低了機車控制裝置的可靠性,參數調節周期較長[8]。
機車在線運行時,攜帶多臺示波器或者采用數據采集觀察監測機車運行狀態信號的方法基本不可行,雖然司機室的顯示屏上能夠看到一些利用通信傳輸上來的機車的狀態信號和故障條目,但是這些信息只能每隔64ms 傳輸一次,因此數據信息的實時性較差,不能準確反應和捕捉機車的瞬態隱性故障。
為適應鐵路裝備信息化的需求,文章在TPY系列簡統化微機控制裝置的開發中,結合車載信息處理系統的特點,在機車控制模塊與記錄診斷模塊上,對數據通信接口進行了豐富。新系統同時具備RS485、USB 主從、MVB、工業以太網等多種通信接口,拓展信息化的各種功能。
機車控制插件具備實時狀態監視與數據記錄系統,不論是機車的出廠調試,還是在線運行[9],都可以方便地通過此系統全面、長時間地監測及記錄機車運行的數據信息(包括機車運行的一些關鍵中間變量),并利用其存儲的豐富數據,通過數據回放方式仔細分析機車的瞬態隱性故障,提升調試及監測水平,提高工作效率。機車控制插件通過共用數據采集模塊,而將控制功能模塊與數據傳輸功能模塊分離,能提高機車運行的安全性、可靠性;并具有在線參數調節功能,能在惡劣的運行環境下實現在線參數調試、監視,大大縮短調試周期,減小工作量。
4 結語
設計TPY 新型簡統化微機控制柜是低成本快速響應市場要求的一項有效舉措,這必將減少電力機車控制裝置設計生產的周期和備件的數量,提高產品質量和可靠性,并且方便現場管理、節約維修成本。在批量推廣后,其必將給生產、檢修和運行管理帶來如備件種類數量減少、機車檢修與運行履歷信息管理自動化等諸多便利,因此具有良好的社會效益與經濟效益。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
中國科技論壇(2017年7期)2017-07-25 08:49:53
軟件導刊(2016年9期)2016-11-07 21:35:42
通信電源技術(2016年5期)2016-03-22 01:09:49
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
石油知識(2016年2期)2016-02-28 16:20:16
自動化儀表(2015年11期)2015-04-01 01:02:40
