MMC換流器虛擬子模塊分層逆向模型預測控制
2022-03-24 06:30:14王金玉鄭德森張忠偉
電氣傳動自動化 2022年1期
關鍵詞:模型
王金玉,鄭德森,張忠偉
(東北石油大學 電氣信息工程學院,黑龍江 大慶 163318)
模塊化多電平換流器(Modular multilevel converter,MMC)因其可擴展性強、輸出諧波小等優點被廣泛應用于高壓大功率能量傳輸系統中,并且在新能源并網領域也展現出優秀的性能[1],與傳統換流器相比MMC橋臂子模塊數量眾多。經典控制方法多采用線性控制器和復雜的級聯結構,其可實現度較低,無法同時兼顧交流側電流、子模塊電容電壓等多目標綜合控制,控制算法復雜并且控制器計算負荷過大[2-3]。模型預測控制因其控制原理簡單、易于多目標優化等優點被廣泛應用于各類多電平換流器控制中。文獻[4]采用簡化的有限集模型預測控制,在系統預測環節將期望輸出電壓有限集合作為控制變量,雖有效降低控制器計算量但權重因子設計過程復雜且控制系統整體延時較長。為減輕控制器計算負擔、降低開關頻率,文獻[5]引入雙重保持因子將子模塊初始投切狀態引入排序,此方法受橋臂子模塊參數影響較大,均壓控制效果不明顯。文獻[6]基于上一周期子模塊導通數目限定子模塊數目變化量減少目標函數循環預測尋優,但由于橋臂子模塊投入數量的限制,MMC輸出效果并不理想。
針對以上問題本文提出了一種虛擬子模塊分層逆向模型預測控制策略(SVLM-RMPC),將子模塊電容電壓控制從代價函數中解耦,通過橋臂電壓逆向推導交流側輸出電壓計算補償壓降值,直接求解下一預測周期內子模塊最優投入數量。在預測MMC系統輸出電壓的基礎上建立虛擬子模塊集合,結合橋臂電流方向在映射環節引入換位裕度,不斷改變虛擬子模塊和實際子模塊間循環映射關系,將虛擬子模塊上層控制環節高優先級的投切方案映射到實際系統中,進而降低子模塊投切頻率。此方法分層優化控制目標無需設計權重因子,在子模塊均壓環節僅需尋找子模塊電壓的實時極值,減少子模塊電容電壓排序次數減輕控制器計算負荷提高子模塊的均壓效果,保證了控制系統的穩定性且易于實現MMC最大電平輸出。
1 MMC數學模型構建
圖1為MMC拓撲結構,虛線方框為一個相單元。每個相單元分為上下兩個橋臂,分別用下標p和n表示,橋臂由n個級聯子模塊和一個橋臂電感構成。通常每個子模塊是由兩個IGBT和反并聯二極管組成的半橋結構,可在兩種電流流向下通過控制T1、T2開關管的導通關斷實現MMC子模塊閉鎖,投入,切除三種運行狀態的切換。工程中可將橋臂子模塊等效為一個受控電壓源,其等效電路如圖2所示。
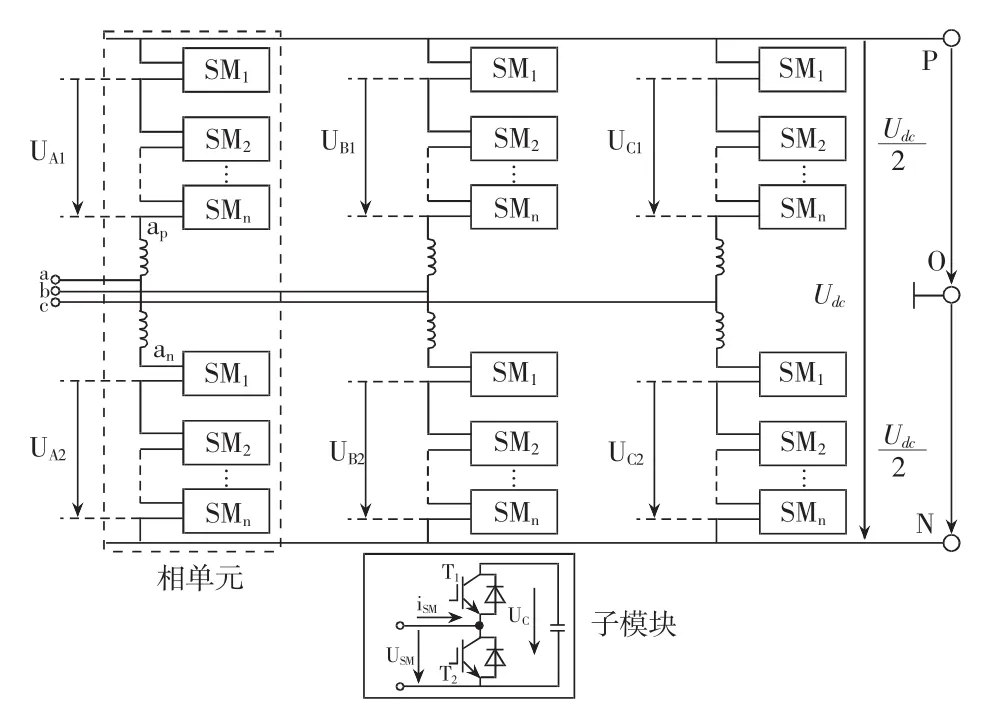
圖1 三相MMC拓撲結構與子模塊原理圖
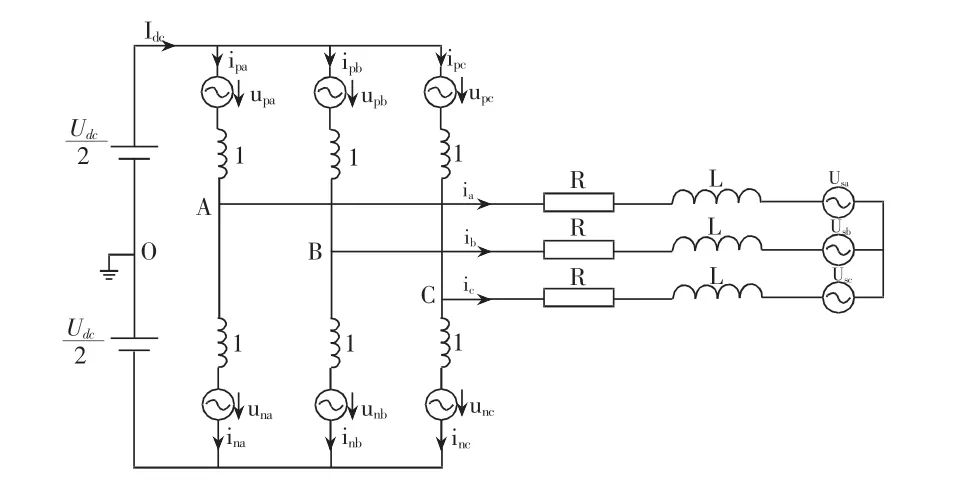
圖2 MMC等效電路
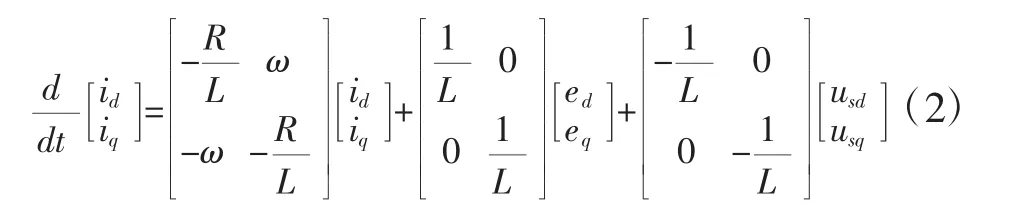
對MMC數學模型進行簡化處理,式1為MMC輸出電壓表達式:
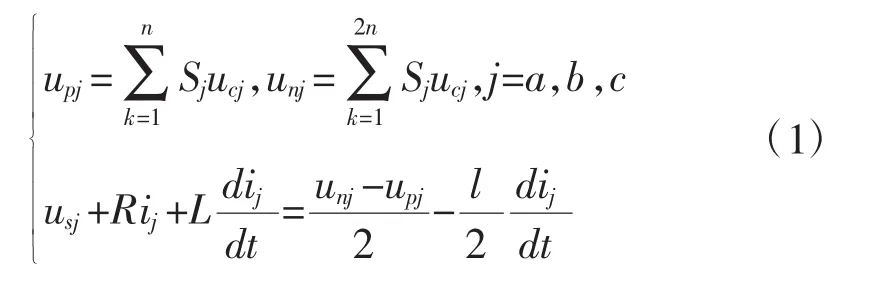
以A相為例對MMC換流器內部環流進行分析,Idc為直流側母線電流平均值,izj表示橋臂環流,流經三相橋臂的環流主要包括直流分量和負序交流二倍頻分量,式(3)為將環流考慮在內的橋臂電流數學模型:
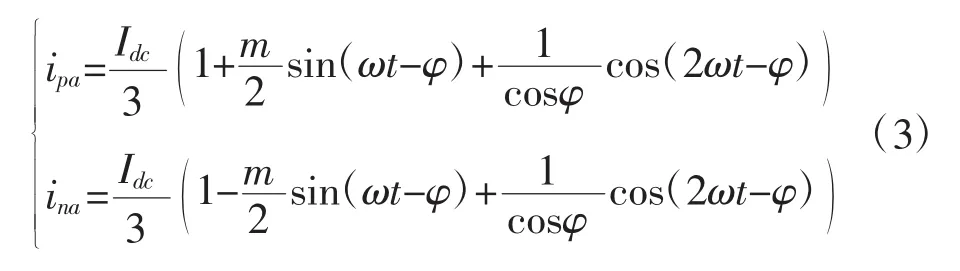
分析可知MMC系統環流只存在于MMC換流器內部,獨立于交流輸出側的電流和負荷,與直流分量和二倍頻分量無關。通過負序旋轉坐標變換對MMC子模塊進行合理投切分配即可實現對輸出電流、輸出功率和子模塊電壓等多個狀態量的控制。
2 模型預測控制策略
2.1 傳統有限集快速模型預測控制(FCS-MPC)
傳統有限集模型預測控制是以輸出電平為控制目標,對系統進行離散化處理[7]。在每一個采樣周期的起始時刻對電壓電流進行A/D采樣,在系統預測環節中將子模塊所有可能的工作狀態作為可控變量,根據預測模型的輸出結果循環計算下一周期預測值,利用目標函數對MMC系統進行滾動優化搜尋使代價函數值最小的子模塊投切狀態,設置MMC觸發脈沖。FCS-MPC策略簡化原理圖如圖3所示。
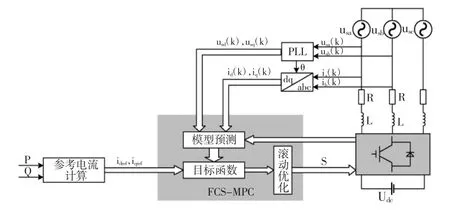
圖3 傳統有限控制集模型預測控制(FCS-MPC)原理圖
假設電流預測環節數字控制系統采樣周期足夠小,將MMC系統數學模型進行離散化處理對式(1)進行一階前項差分近似得到換流器輸出電流預測值:


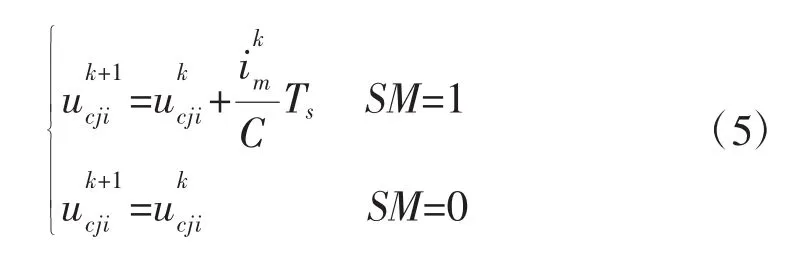
式中ucji為子模塊電容電壓,C為子模塊電容值。系統內部環流主要流動于直流母線之中,雖不影響輸出電流波形但因其疊加在橋臂上導致子模塊開關頻率增加,影響系統穩定性。預測環節還需考慮MMC系統環流抑制問題,在MMC各相上下橋臂同時疊加相同電壓分量uz對系統內部狀態進行控制。相間環流離散模型表示為:
FCS-MPC控制器通過設計代價函數中權重因子所占比重,在有限狀態空間滾動優化尋找子模塊最優投切狀態,選取使代價函數Jm最小的開關狀態作為橋臂子模塊的觸發信號。通過三相并行在線滾動優化實現多個目標的協同控制。系統代價函數表示為:

得到使代價函數最小的子模塊投切狀態后,將子模塊電容電壓運用排序算法設置優先級,選取未來時刻最優的補償電壓分量,在均壓環節修正各相上下橋臂期望輸出電壓值實現對MMC系統的控制。
2.2 分層逆向模型預測
傳統有限集模型預測控制的三個控制目標相互存在耦合無法同時實現多目標最優控制,并且各目標函數的權重因子調試過程較為繁瑣。針對傳統FCS-MPC存在的問題,逆向模型預測控制策略將子模塊電容電壓控制環節進行解耦,使其控制過程在一個獨立的控制回路中進行。根據功率外環控制得到交流側電壓參考值,通過輸出電壓預測模型建立代價函數分層優先選擇最優投入子模塊數量。圖4為虛擬子模塊分層逆向模型預測控制簡化原理圖。
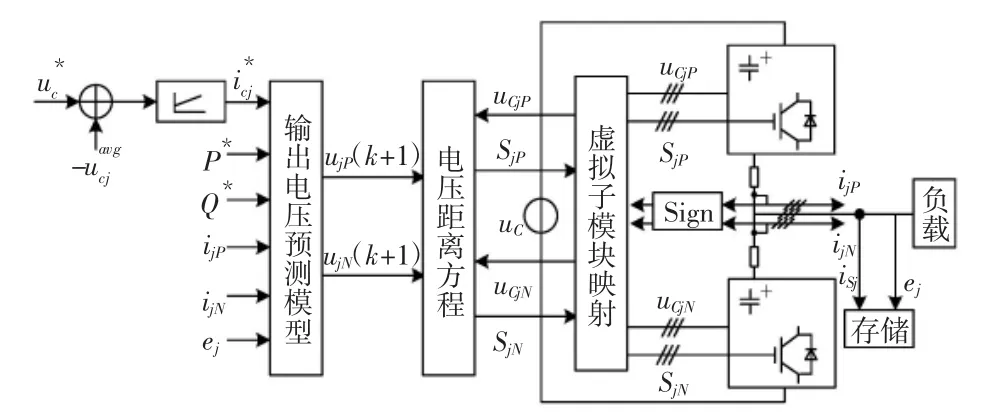
圖4 虛擬子模塊分層逆向模型預測控制(SVLM-RMPC)

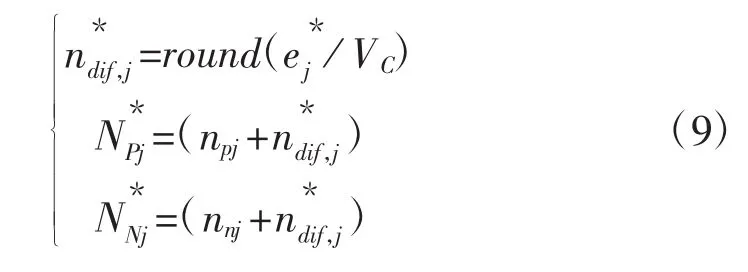
2.3 基于虛擬子模循環映射的電壓平衡控制
在逆向模型預測環節得到子模塊投切個數后進入模塊電容均壓控制環節,子模塊導通時其所在橋臂的電流流向直接決定了子模塊電容的充放電狀態,理論上保證周期內每個子模塊的投切概率相同即可實現其自平衡[8]。進一步對控制算法細分簡化處理,定義子模塊電容對所有子模塊平均電壓的最大正偏差u1和最大負偏差u2:

將上橋臂虛擬子模塊依次命名為VSM1~VSMn,下橋臂為VSMn+1~VSM2n。將其與實際子模塊SM一一對應。設置一個換位容量裕度值ε,在一個預測周期開始時如果電壓超出換位裕度容量,則更新最大最小值的映射關系,否則保持上個預測周期的映射關系。以充電狀態為例,如果u2<ε,則仍然保持上一周期投切概率最高的虛擬子模塊與實際子模塊的對應關系保持不變;如u2>ε,則將當前占空比最高的虛擬子模塊與電容電壓最低的子模塊進行映射。

圖5 改進的虛擬子模塊循環映射方法流程圖
以五電平為例,假設某個循環周期內橋臂電流為正,將投入概率最大的虛擬子模塊映射到電容電壓最小的實際子模塊上。使得電壓大的子模塊優先放電,電壓小的子模塊優先充電,根據橋臂電流方向以及子模塊電壓映射排序結果進行優先級區分,篩選出優先級最大和最小的子模塊對其編號進行刷新,其余子模塊保持原有狀態。
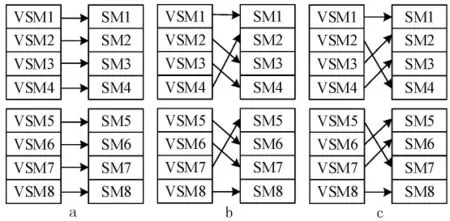
圖6 改進的虛擬子模塊循環映射(SVLM)原理圖
該方法只需刷新正負偏差最大的兩個子模塊設為最高優先級,無需對系統各相子模塊進行逐一邏輯排序。極大減輕了模型預測控制器運算負荷、減少了單個子模塊投切頻率、降低了開關損耗。控制器在均壓排序算法基礎上,對處于投入狀態子模塊電容電壓進行二次優化,便可避免MPC對子模塊逐一進行電壓值預測,有效縮短了計算時間。
3 仿真分析
系統控制環節包括相電流跟蹤給定值計算和逆向分層求解最優輸出電平數以及虛擬子模塊循環均壓映射。系統初始工作狀態為穩態系統,參數見表1。
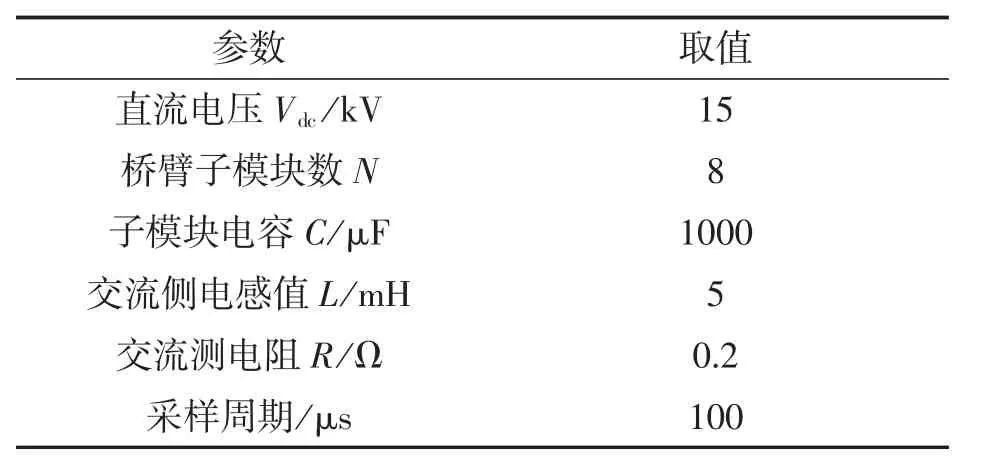
表1 MMC系統仿真參數
仿真結果圖7顯示了MMC系統輸出效果和子模塊電容均壓效果,可以看出MMC系統輸出電流正弦度良好,輸出電流THD為1.97%,與傳統FCS-MPC相比子模塊均壓效果良好、可穩定運行、諧波含量較低、輸出電壓無大幅度波動、跳變器件開關損耗較小、交流側電流跟隨精度高。
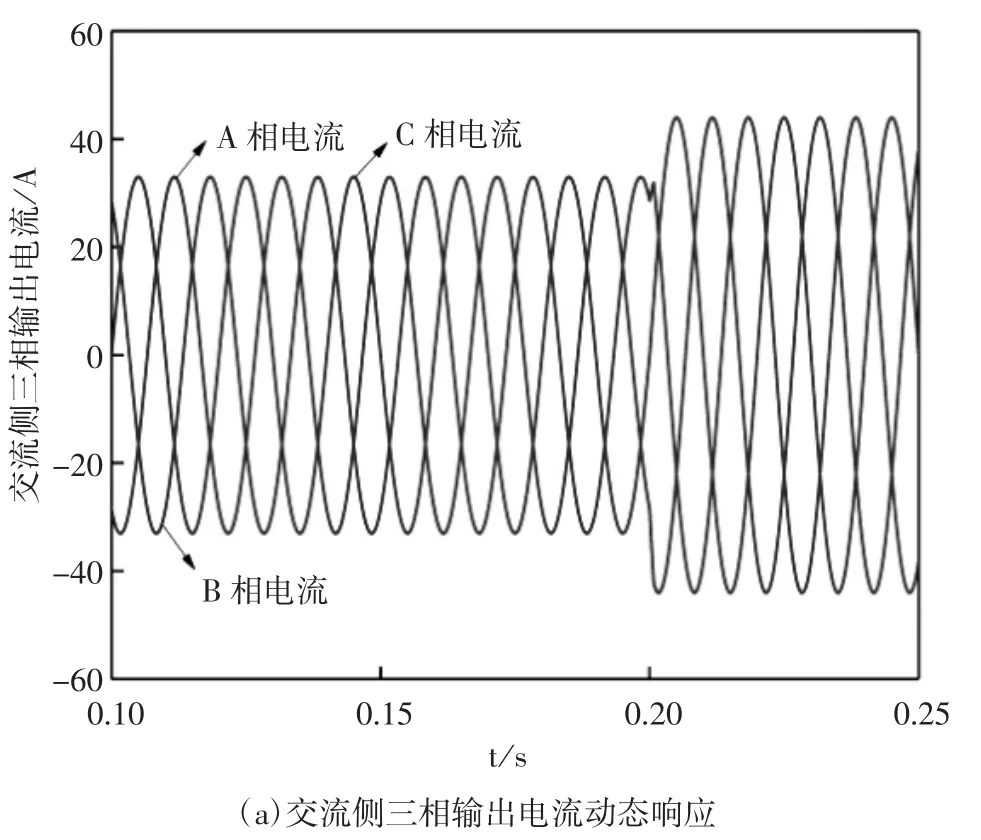


圖7 MMC虛擬子模塊分層逆向模型預測控制仿真結果
當電流給定突變時,由系統動態響應曲線可見交流側動態響應僅需1.5ms,電流迅速跟蹤給定,與傳統有限集模型預測控制相比動態響應快。在0.1s時加入環流控制器,環流波動大幅度減小,二次基頻成分得到了有效抑制,橋臂環流抑制效果明顯。換位裕度為0.2時,根據子模塊觸發信號計算平均開關頻率為800Hz,周期內預測次數由210次降為175次,與傳統虛擬子模塊循環映射均壓控制策略相比大大降低了開關損耗,驗證了控制策略的有效性。
4 結論
筆者提出一種改進的MMC虛擬子模塊分層逆向模型預測控制方法(SVLM-RMPC),通過輸出電壓預測模型將電壓預測環節從代價函數中解耦,構建電壓距離方程逆向分層預測下一周期子模塊最優投切數量,在子模塊均壓控制環節運用改進的虛擬子模塊循環映射方法引入裕度容量,進一步降低功率器件開關頻率,優化子模塊投切概率,增加了控制系統的穩定性,同時文中所提方法避免權重因子整合,節省了數字控制資源。仿真結果表明相較于傳統FCS-MPC,SVLM-RMPC有效減輕了控制器運算負荷,大幅縮短了系統運算耗時。橋臂環流抑制效果明顯,子模塊均壓效果良好,輸出側動穩態性能優秀,MMC系統可穩定運行。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
