火星著陸關(guān)鍵環(huán)節(jié)多學(xué)科交叉設(shè)計與驗證
2022-03-25 02:06:20孫澤洲黃翔宇董天舒
宇航學(xué)報 2022年1期
董 捷,饒 煒,孫澤洲,王 闖,黃翔宇,李 齊,李 健,董天舒
(1.北京空間飛行器總體設(shè)計部,北京 100094;2.北京控制工程研究所,北京 100094;3.北京空間機電研究所,北京 100094)
0 引 言
火星著陸與地球再入返回相比雖有相似性,但由于火星大氣成分、物理性質(zhì)與地球不同,且不確定性大,使得整個著陸過程對減速性能要求更高,階段劃分更為復(fù)雜,時序異常緊張。
目前已經(jīng)成功實施的火星著陸任務(wù)的進入、下降與著陸過程(簡稱EDL)主要分為四個階段:氣動減速段、降落傘減速段、動力下降段和著陸緩沖段。各類參數(shù)的不確定性與設(shè)計約束將影響各階段的任務(wù)實現(xiàn)及各關(guān)鍵環(huán)節(jié)切換。迄今為止國際上火星表面著陸任務(wù)成功率僅約50%。可見火星著陸探測任務(wù)風(fēng)險極高,對航天器設(shè)計考驗極為苛刻,其面臨的挑戰(zhàn)主要包括:
1)地火距離遠:探測器與地球通信時延大,地面不具備干預(yù)EDL過程的能力,必須自主完成;
2)火星大氣稀薄:相比地球上減速著陸,同樣的有效載荷需要更大直徑的外形尺寸;氣動減速后需要在超音速、低動壓下完成降落傘開傘;火星進入器經(jīng)氣動外形、降落傘兩級減速后,穩(wěn)降速度仍未達到安全觸火條件,必須再使用反推發(fā)動機、著陸緩沖機構(gòu)等手段;
3)環(huán)境參數(shù)不確定性大:目前對火星大氣模型沒有實測手段,美國幾次成功的探測任務(wù)是有限的數(shù)據(jù)來源。因此與地球大氣相比不確定性更大,影響理論分析和工程建模;
4)復(fù)雜氣動力熱條件:進入器在火星大氣中飛行、分離面分離及發(fā)動機工作時,涉及與流場的相互作用,產(chǎn)生的力/熱效應(yīng)與地球返回區(qū)別較大,需進行針對性設(shè)計;
5)地面驗證困難:地面難以完全模擬火星環(huán)境及進入器工作條件,只能綜合大量各類單項試驗數(shù)據(jù),建立數(shù)學(xué)模型進行全系統(tǒng)仿真分析或半物理驗證;
6)多系統(tǒng)耦合性更強:正是因為前面的各項難點,火星著陸任務(wù)中氣動減速、降落傘減速、動力減速、著陸緩沖環(huán)節(jié)需要綜合氣動、防熱、GNC、推進、降落傘、結(jié)構(gòu)、材料以及大氣環(huán)境等眾多專業(yè)與學(xué)科開展聯(lián)合設(shè)計。
本文針對上述火星著陸任務(wù)面臨的挑戰(zhàn),結(jié)合國外典型火星著陸任務(wù)和天問一號研制情況,對前述EDL四個階段重點問題的多學(xué)科交叉情況識別、相應(yīng)設(shè)計方案及驗證方法進行了分析研究。
1 關(guān)鍵環(huán)節(jié)設(shè)計
1.1 氣動減速段
..大氣進入方式選擇
基于目前技術(shù)能力,火星大氣進入方式主要有“彈道式”和“彈道-升力式”兩種。國外已經(jīng)成功實施的火星著陸任務(wù)中,火星科學(xué)實驗室(MSL)和毅力號任務(wù)采用了嚴(yán)格意義上的“彈道-升力式”進入方式,火星探路者、勇氣號/機遇號(MER)、鳳凰號及洞察號均采用了彈道式進入方式。“彈道-升力式”較“彈道式”進入可以更好的適應(yīng)缺乏先驗數(shù)據(jù)、不確定性和散布較大的環(huán)境參數(shù)和氣動參數(shù),保證開傘高度等條件,同時還可以通過調(diào)節(jié)升力進行制導(dǎo)控制以實現(xiàn)更高的落點精度。
天問一號進入艙(探測器中用于完成著陸任務(wù)的系統(tǒng))在進入方式對比分析時發(fā)現(xiàn),大氣、氣動參數(shù)偏差增大25%,“彈道式”進入下,開傘高度等關(guān)鍵指標(biāo)已不滿足安全性要求。而“彈道-升力式”進入時,關(guān)鍵指標(biāo)對大氣與氣動條件并不敏感,仍能適應(yīng)。因此,考慮到中國開展首次火星著陸任務(wù),為提高系統(tǒng)設(shè)計裕度和任務(wù)安全性,選擇了“彈道-升力式”方案。
..大氣進入初始條件
大氣進入初始條件包括大氣進入角和進入點位置,是保證正常執(zhí)行氣動減速過程的先決條件。
1)初始大氣進入角設(shè)計
包括對進入走廊的分析和在進入走廊內(nèi)選擇最優(yōu)進入角兩部分。進入走廊定義為實現(xiàn)正常進入火星大氣的初始進入角范圍。氣動減速過程進入器所承受的最大過載、最大熱流和總吸熱量均需滿足一定約束,終端對開傘狀態(tài)約束也很嚴(yán)格,這些參數(shù)均主要受進入角影響。
進入角過大時,軌道過陡,過載峰值和峰值熱流過大,開傘高度易過低;進入角過小時,飛行時間較長,總加熱量偏大,甚至不能正常進入。因此天問一號進入艙在設(shè)計時,在滿足“彈道-升力式”進入制導(dǎo)控制能力(傾側(cè)角參考剖面)的基礎(chǔ)上,根據(jù)開傘高度最高需求,在進入走廊內(nèi)選取最優(yōu)的標(biāo)稱進入角。
2)大氣進入點散布
進入器到達火星大氣進入點的誤差與進入前執(zhí)行的一系列關(guān)鍵動作的精度密切相關(guān)。天問一號任務(wù)采用了探測器先降低近火點高度變軌(簡稱“降軌”),進入艙再與環(huán)繞器(用于攜帶進入艙環(huán)繞火星)分離的方式實現(xiàn)到達大氣進入點。
導(dǎo)致大氣進入初始條件存在偏差的主要因素包括:降軌時機與精度、進入前進入艙與環(huán)繞器的分離速度大小和方向精度、進入前姿態(tài)控制噴氣累計對軌道的擾動等因素,通過建立全過程的誤差分析模型進行打靶仿真,得到大氣點散布結(jié)果以支撐后續(xù)設(shè)計。
在綜合降軌后至兩器分離前狀態(tài)確認(rèn)與準(zhǔn)備時間、降軌誤差擴散、進入艙長時間GNC自主導(dǎo)航影響等因素后,選擇在大氣進入點前約6 h執(zhí)行降軌;為降低兩器分離相對速度誤差對進入點影響,選擇兩器分離方向垂直于運行軌道平面。
..氣動外形設(shè)計
火星進入對進入器氣動性能的需求與地球大氣顯著不同。由于火星大氣極為稀薄(僅約為地球大氣的1%)且大氣成分不同,將影響高超聲速氣動力的大小和分布,因此在氣動外形設(shè)計上相比地球返回器有特殊的設(shè)計考慮。
氣動外形包括大底和后體兩部分。目前國外防熱大底基本外形均為球錐形大鈍頭體,半錐角為70°。這種設(shè)計從海盜號任務(wù)開始,在歷次成功的NASA火星著陸任務(wù)均加以繼承。大鈍頭體主要特點是跨音速段存在動不穩(wěn)定性,需要充分評估對開傘等環(huán)節(jié)影響。美國火星著陸任務(wù)后體類型包括單錐體、雙錐體、三錐體等,綜合艙內(nèi)設(shè)備布局進行選擇。
天問一號進入艙也采用了球錐形大鈍頭前體的基礎(chǔ)方案,在艙體接近動不穩(wěn)定條件前實現(xiàn)開傘;為了保證開傘前攻角條件,還采用了基于配平翼的可變氣動外形(詳見1.2.1節(jié))。綜合考慮降低整個進入艙體重量、優(yōu)化背罩承載強度(適應(yīng)開傘初期力學(xué)載荷條件)、增加艙內(nèi)有效空間包絡(luò)、保證減速氣動特性等因素,采用了一種球錐后體外形(見圖1)。
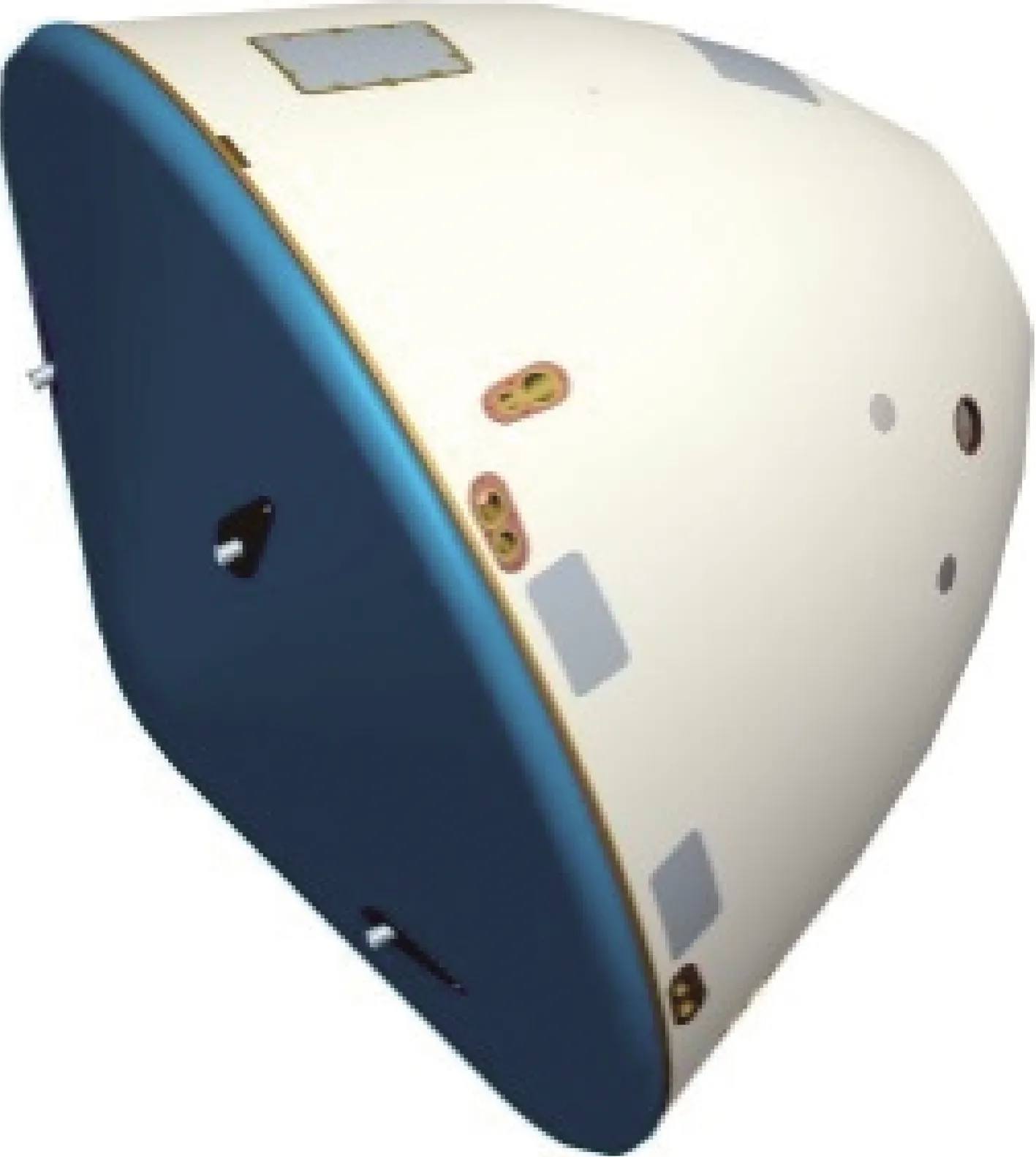
圖1 天問一號進入艙進入氣動外形
..氣動防熱設(shè)計
1)防熱材料選擇
火星大氣的密度、溫度、壓力、成分與地球差異很大,現(xiàn)有地球返回任務(wù)中,基于空氣環(huán)境理論分析與試驗測試數(shù)據(jù)的碳/硅復(fù)合的燒蝕修正算法不能直接使用,并且由于火星進入器表面氣動加熱環(huán)境相對地球返回器較低,氣固界面的動力學(xué)燒蝕過程、熱解氣體對表面燒蝕的影響會更突出。天問一號進入艙根據(jù)火星進入中低熱流、CO介質(zhì)條件和輕量化要求,借鑒嫦娥五號返回器的側(cè)壁防熱設(shè)計,采用了富硅組元的蜂窩增強低密度防熱材料作為大底防熱材料,保證兼顧強度與輕質(zhì)的要求。
2)轉(zhuǎn)捩的適應(yīng)性設(shè)計
火星大氣相對稀薄,來流雷諾數(shù)較低,早期的海盜號、MER因進入速度低或尺寸小可按層流流動設(shè)計,火星探路者任務(wù)、鳳凰號任務(wù)雖存在湍流,但尺寸與進入攻角小,熱流影響有限。當(dāng)進入質(zhì)量與外形規(guī)模大、進入速度高、攻角大時,湍流影響則較為顯著:如MSL研制中,數(shù)值計算及地面風(fēng)洞試驗都驗證了在峰值氣動加熱時刻,來流在大底表面將轉(zhuǎn)捩為湍流,進而導(dǎo)致高熱流及大剪切力問題。針對性地將大底防熱材料更改為PICA(酚充填碳燒蝕材料)。
天問一號任務(wù)由于采用先環(huán)繞再著陸的方式,進入速度遠未達到MSL條件,整體尺寸規(guī)模也相對較小,但任務(wù)前的仿真表明仍存在達到湍流條件的可能性,因此在防熱材料選型和厚度設(shè)計時按湍流邊界考慮以保證防熱裕度。
3)推力器點火時的局部防熱
推力器點火工作期間,與周圍氣體流場發(fā)生作用,會帶來局部結(jié)構(gòu)升溫。MSL任務(wù)在研制中發(fā)現(xiàn)氣動減速段推力器工作時,推力器周圍結(jié)構(gòu)會帶來不可承受的氣動熱條件,最終通過修改推進系統(tǒng)管路和推力器指向,解決了溫度問題。
天問一號進入艙防熱結(jié)構(gòu)研制過程中,基于大量的仿真分析,獲取了姿控推力器點火工作時周邊局部防熱結(jié)構(gòu)的附加熱流條件,因此更換了與推力器相鄰的背罩局部防熱材料,增強了防熱能力。
..特殊氣動力問題與設(shè)計考慮
1)噴流效率
鳳凰號任務(wù)研制期間的計算流體力學(xué)(CFD)仿真顯示,當(dāng)馬赫數(shù)接近亞跨音速階段時,部分推力器工作時會與周圍流場相互影響,特別是推力器噴流方向處于后體尾流區(qū)域時,噴流效率明顯降低并存在控制力矩反向,嚴(yán)重影響控制效果。主要原因是姿態(tài)控制推力較小,與外部環(huán)境流場擾動在一個量級。因此鳳凰號在軌最終放寬了姿態(tài)控制閾值,盡量不使用推力器控制。
天問一號進入艙在研制階段,根據(jù)CFD仿真分析,當(dāng)推力較大時姿控推力器工作與周圍環(huán)境流場相互作用不會明顯影響姿態(tài)控制效果,僅有小幅控制力矩下降。因此在姿態(tài)控制推力器配置時考慮了250 N和25 N兩種不同推力組合,在氣動減速后期至開傘前,不再使用25 N推力器,僅使用250 N推力器進行姿控,從而兼顧了姿態(tài)控制精度與噴流效率需求。
2)亞跨段脈動條件
采用大鈍頭構(gòu)型的優(yōu)點是在高超聲速進入時具有高阻力特性,有利于完成氣動減速,但由于鈍體繞流效應(yīng),流體繞過肩部后會出現(xiàn)分離,在艙體尾端等迎風(fēng)面底端形成分離區(qū),分離區(qū)內(nèi)渦流脈動劇烈,會在進入器壁面產(chǎn)生振幅較高的脈動壓力,其頻率范圍包含了普通結(jié)構(gòu)板的共振頻率。從而在氣動減速后期接近亞跨音速階段帶來兩方面影響:
(1)脈動壓力可使進入器壁面出現(xiàn)較大局部載荷,易激起結(jié)構(gòu)抖振響應(yīng);
(2)脈動壓力作為隨機激勵以噪聲形式通過透射及結(jié)構(gòu)共振轉(zhuǎn)變?yōu)榕搩?nèi)噪聲,反映至艙內(nèi)設(shè)備的安裝面,影響艙內(nèi)設(shè)備工作性能。在一定程度上會影響慣性測量單元(IMU)等關(guān)鍵導(dǎo)航敏感器的測量輸出,進而影響導(dǎo)航和定姿結(jié)果,需評估影響并優(yōu)化安裝布局,甚至開展減/隔振設(shè)計。
天問一號進入艙在設(shè)計時評估了氣動減速后期艙體的脈動條件量級,經(jīng)分析可以包絡(luò)基于其它力學(xué)載荷制定的產(chǎn)品隨機振動試驗條件,未超出整體結(jié)構(gòu)和關(guān)鍵敏感器的適應(yīng)能力。
1.2 降落傘減速段
由于火星大氣稀薄,進入器經(jīng)過氣動外形減速后,仍需要采用降落傘減速。目前已經(jīng)成功實施的國內(nèi)外火星著陸任務(wù)均采用一級降落傘減速方案,傘型為“盤-縫-帶”傘。該階段需要重點考慮以下幾方面內(nèi)容。
..降落傘彈射
1)開傘約束
開傘環(huán)節(jié)設(shè)計上重點需要考慮以下條件:
2)開傘控制方法設(shè)計
當(dāng)前開傘控制方法主要包括:純時間控制法、過載-時間控制法、氣壓高度控制法、雷達高度控制法、自適應(yīng)控制法。
由于火星大氣模型等參數(shù)不確定性大,純時間控制、過載時間控制、氣壓高度控制這些基于地球環(huán)境的控制方法無法保證開傘時高度、動壓在要求范圍,其散布普遍較大。采用雷達高度控制法需要在大底附近安裝微波雷達,其對防熱結(jié)構(gòu)設(shè)計的要求較高,目前僅海盜號著陸器采用。
自適應(yīng)控制法以動壓、馬赫數(shù)、高度、速度等參數(shù)為控制目標(biāo)(在設(shè)計時需要保證進入一定的馬赫數(shù)與動壓范圍),通過加速度計測量的加速度值及預(yù)置的開傘控制律識別進入彈道特性,動態(tài)確定降落傘開傘時間。這在海盜號后續(xù)成功的著陸任務(wù)中均予以采用,而MSL任務(wù)由于采用彈道-升力進入,到達相同馬赫數(shù)時,飛行高度更高,動壓相對較低(見圖2),進一步簡化為馬赫數(shù)開傘。
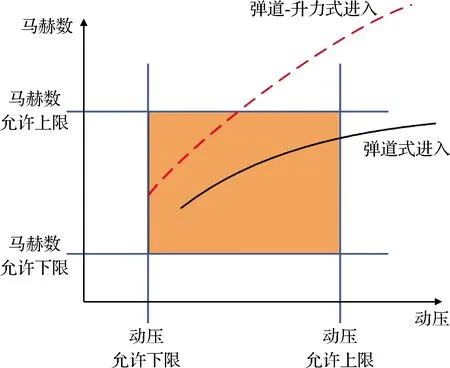
圖2 開傘“馬赫數(shù)-動壓”范圍
火星氣動減速段通常僅依靠IMU結(jié)合重力計算,在慣性坐標(biāo)系下進行位置、速度等導(dǎo)航推算。在標(biāo)稱馬赫數(shù)選擇時要考慮表1中約束條件1~3,特別是器上計算馬赫數(shù)的偏差。受大氣進入初始導(dǎo)航誤差(地面測定軌給出)、陀螺和加速度計漂移誤差等影響,導(dǎo)航誤差會隨時間積累。此外,由于器上僅能獲取基于IMU的速度數(shù)據(jù),對于風(fēng)速等環(huán)境參數(shù)無法直接測量,因此器上馬赫數(shù)的計算和風(fēng)速影響均反映為誤差量。通常馬赫數(shù)計算總偏差在±0.3以內(nèi)。
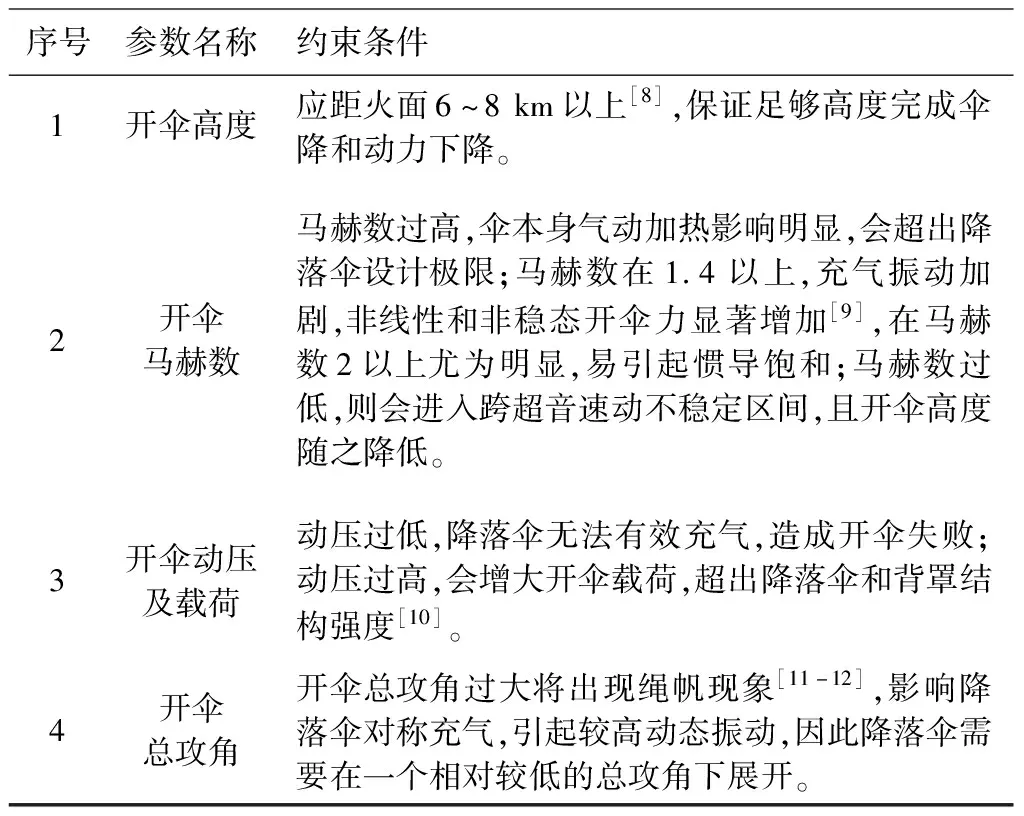
表1 開傘的約束條件
天問一號進入艙由于也采用“彈道-升力式”進入,為了保證開傘條件也適宜采用馬赫數(shù)開傘,綜合各項參數(shù)拉偏后的全系統(tǒng)打靶仿真結(jié)果,在軌最終選擇了1.8的開傘觸發(fā)條件。
3)實現(xiàn)開傘前攻角條件
針對“彈道-升力式”進入,由于氣動減速段始終處于標(biāo)稱配平攻角附近,開傘前該條件下有可能引起“繩帆現(xiàn)象”(表1中約束4),產(chǎn)生較高動態(tài)振動,甚至開傘失敗。因此在開傘前需要進行攻角回零以保證較好的開傘條件。目前有調(diào)整進入器質(zhì)心和壓心兩種實現(xiàn)方法:
彈射內(nèi)部質(zhì)量塊調(diào)整質(zhì)心:MSL和毅力號任務(wù)采用了該方法。在大氣進入前9 min,先彈射一側(cè)2個質(zhì)量塊實現(xiàn)質(zhì)心偏置,以建立配平攻角;開傘前,再彈射另一側(cè)6個質(zhì)量塊,實現(xiàn)質(zhì)心回零,進而配平攻角隨之回零。缺點是分離的質(zhì)量塊重量較大(總質(zhì)量達到300 kg),約占著陸后有效質(zhì)量的1/3,且要考慮多個質(zhì)量塊分離時的安全性,以防止與進入器的再次碰撞。
在開傘前打開配平翼調(diào)整壓心:天問一號任務(wù)在開傘前基于馬赫數(shù)條件將配平翼打開,利用氣動力作用將進入器的攻角調(diào)整至零。整個系統(tǒng)質(zhì)量代價約11 kg(約占著陸后有效質(zhì)量5%),相對彈射質(zhì)量塊方式有明顯優(yōu)勢。其設(shè)計難點體現(xiàn)在:
(1)綜合考慮配平翼展開后的氣動參數(shù)特性變化,配平翼展開選擇了反映氣動特征的馬赫數(shù)參數(shù)觸發(fā);由于馬赫數(shù)預(yù)計存在偏差(與1.2.1節(jié)開傘預(yù)計類似),需要保證與開傘有充足的時間間隔,同時又要避免過早改變升阻比而影響制導(dǎo)控制過程,以及考慮局部熱環(huán)境影響。
(2)在仿真得到展開時外部的動壓上限和下限包絡(luò)后,機構(gòu)驅(qū)動設(shè)計需要在保證可靠展開的同時避免沖擊力過大。
(3)基于對配平翼展開后的氣動彈性特性分析,由于存在附加的極限環(huán)動態(tài)載荷條件對結(jié)構(gòu)強度的影響,對翼板易破壞部位需進行加強設(shè)計。
(4)針對配平翼未正常展開的故障工況,還需設(shè)計備份措施以保證任務(wù)安全性:在GNC判斷配平翼未到位后,將通過250 N推力器直接控制整器攻角回零。
..大底分離
大底分離是在開傘后至背罩分離前執(zhí)行,完成大底分離并與進入器處于安全距離后,微波雷達開始測量相對火面距離和速度。需要滿足以下條件:
1)保證分離安全性
分離機構(gòu)需創(chuàng)造一定的初始分離速度,避免近場流場特性使大底回流與進入器碰撞;進入器/降落傘組合體與大底間有足夠的彈道系數(shù)差保證遠場正向分離狀態(tài)(馬赫數(shù)0.8以下兩者阻力系數(shù)存在明顯變化)。
2)保證微波雷達測量有效性
大底分離后至背罩分離前,考慮進入器上利用微波測量數(shù)據(jù)修正IMU的計算收斂過程,需保證微波雷達相對火面測量有足夠時間;同時雷達開始測量時間不宜過早,以防止大底與進入器距離較近時,雷達波束投射至大底損壞產(chǎn)品或返回錯誤測距數(shù)據(jù),影響正常導(dǎo)航。
目前已采用的分離觸發(fā)方式包括時間延時和馬赫數(shù)兩種。MSL之前美國的火星著陸任務(wù)均采用基于開傘時刻延時固定時間觸發(fā),MSL和毅力號則采用基于馬赫數(shù)觸發(fā)。時間延時對傘降段降落傘阻力性能偏差適應(yīng)能力有限,馬赫數(shù)觸發(fā)也面臨1.2.1節(jié)提到的馬赫數(shù)預(yù)計偏差問題。
天問一號任務(wù)在分離大底時采用了相對較大的分離速度(約5 m/s)以保證短期近場分離安全性;在滿足小于上限馬赫數(shù)0.8的約束下,采用了“主用馬赫數(shù)觸發(fā)”、“時間限定上下邊界”相結(jié)合的方式觸發(fā)大底分離,可以克服兩種方法的不足,兼顧長期遠場分離不發(fā)生碰撞和后續(xù)微波雷達測量時間。
其中馬赫數(shù)觸發(fā)以開傘后速度增量累計值(僅靠加速度測量值進行時間積分)作為進入艙實際判斷條件,以降低自主導(dǎo)航異常可能帶來的風(fēng)險。
..開傘后的高動態(tài)環(huán)境適應(yīng)性
根據(jù)火星降落傘工作時動力學(xué)特性,開傘力大小除與大氣密度、速度、氣動參數(shù)相關(guān)外,還受到喘振等因素造成的開傘動態(tài)環(huán)境影響。當(dāng)馬赫數(shù)在1.4以上時,由于過度充氣和面積振蕩,非線性且不穩(wěn)定的開傘力將呈指數(shù)增加,主要影響和應(yīng)對設(shè)計如下:
1)自主導(dǎo)航
ExoMars2016著陸器設(shè)計時未充分考慮開傘初期動態(tài)特性,在軌角速度上限超出設(shè)計量程造成陀螺飽和,從而器上推算導(dǎo)航高度過低,過早關(guān)閉減速發(fā)動機,導(dǎo)致著陸器墜毀。此外,自主故障處置能力不足,未充分利用多種測量數(shù)據(jù)(如雷達高度計測量等),制定系統(tǒng)重構(gòu)措施以保證著陸安全。
天問一號任務(wù)設(shè)計了在IMU飽和后,基于微波雷達數(shù)據(jù)重新確定姿態(tài)基準(zhǔn)的自主策略,并實現(xiàn)在軌成功應(yīng)用。歐空局ExoMars2022任務(wù)也已開展了基于微波雷達數(shù)據(jù)的定姿方案研究,并經(jīng)過了外場直升機飛行驗證。兩種策略在原理上可以獲取相對當(dāng)?shù)厮椒较?兩個軸)的姿態(tài)角,無法得到水平方位角,作為備份導(dǎo)航策略已可以滿足安全著陸任務(wù)要求。
2)姿態(tài)控制
在傘降環(huán)節(jié),一方面大底分離、微波雷達波束指向、動力減速初始條件均對進入器的姿態(tài)有要求,需要盡可能阻尼由于開傘后高動態(tài)環(huán)境帶來的大角速度;另一方面,對于天問一號任務(wù),降落傘充氣減速初期可能由于開傘力過大造成背罩結(jié)構(gòu)出口與推力器指向錯位,點火時使高溫羽流返回艙內(nèi)影響安全性;而且開傘初期傘繩力矩較大,姿控力矩相比較小,也無法有效阻尼角速度。此外,MSL任務(wù)研制時發(fā)現(xiàn),為防止進入器姿控羽流對降落傘可能產(chǎn)生的燒蝕損傷,傘降過程需要盡可能減少姿控噴氣頻率。
因此,天問一號進入艙在傘降階段采用了關(guān)鍵事件姿態(tài)停控并規(guī)劃角速度阻尼閾值的方法,以合理頻率進行姿態(tài)控制,具體策略為:
開傘時姿態(tài)停控,開傘后11 s(馬赫數(shù)<1.4,MSL任務(wù)為10 s)啟控;大底分離時姿態(tài)停控,大底分離后1 s啟控(防止姿控產(chǎn)生附加干擾,影響短期分離過程;MSL任務(wù)為3 s;停控時間與分離速度相關(guān),分離速度越小,時間越長)。
傘降過程按大底分離前后兩個階段對俯仰軸和偏航軸設(shè)計相應(yīng)角速度控制閾值(見表2)。
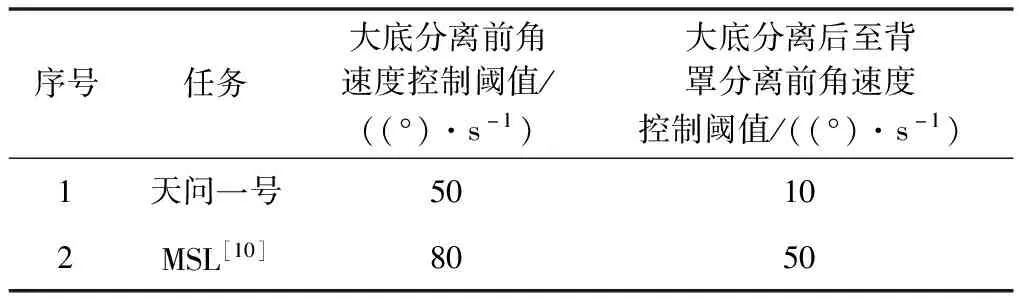
表2 角速度控制閾值
..降落傘關(guān)鍵參數(shù)設(shè)計
1)降落傘面積
降落傘的面積設(shè)計需要綜合結(jié)構(gòu)強度、動力下降初始速度2個因素。降落傘面積越大,開傘載荷越大,降落傘和背罩結(jié)構(gòu)需承受的載荷越大,需要分配更多的系統(tǒng)質(zhì)量保證結(jié)構(gòu)強度;降落傘面積越小,背罩分離前穩(wěn)降速度越大,越不利于動力下降減速,要求動力減速發(fā)動機有更大的推力及推進劑裝填量。
ExoMars2022任務(wù)(原計劃2018年發(fā)射,目前推遲至2022年)為了降低采用一級降落傘的規(guī)模,選擇了兩級減速方案,但由于設(shè)計復(fù)雜,在2020年高空開傘試驗初期發(fā)生傘衣出傘包時破損的情況,這也成為推遲發(fā)射時間的重要原因之一。
天問一號任務(wù)為提高安全性,綜合降落傘和背罩結(jié)構(gòu)載荷承受能力和動力下降減速能力,采用了成熟的一級減速方案,確定了降落傘名義面積(200 m),確保了降落傘減速和動力減速兩個階段關(guān)鍵系統(tǒng)指標(biāo)滿足要求。
2)拖曳比
在傘降階段,降落傘下方懸吊進入器(前體),來流經(jīng)過進入器后產(chǎn)生的尾流會對降落傘工作性能產(chǎn)生影響,引起阻力性能下降,特別在接近1倍音速時有明顯降低,通常通過設(shè)計拖曳比(傘衣底邊至前體的距離與前體直徑的比例)參數(shù)來減少前體尾流影響。
根據(jù)美國海盜號任務(wù)的高空開傘試驗情況,拖曳比大于8.5,前體尾流影響較小;但拖曳比過大,也會造成降落傘開傘過程時間過長或彈射速度過大等不利影響。MSL任務(wù)考慮前體尺寸規(guī)模較大,拖曳比設(shè)計選取為10。天問一號任務(wù)降落傘在進行大量的流固耦合仿真分析、風(fēng)洞試驗和高空開傘試驗后,拖曳比最終也選定為10。天問一號四次高空開傘試驗和在軌實現(xiàn)情況顯示,降落傘阻力系數(shù)并沒有在1倍音速附近有明顯降低。
1.3 動力下降和著陸緩沖段
..背罩規(guī)避
在降落傘減速任務(wù)結(jié)束并進行降落傘和背罩組合體(簡稱“傘罩組合體”)分離時,為防止在后續(xù)動力下降和著陸后,傘罩組合體再次碰撞著陸器,著陸器需執(zhí)行背罩規(guī)避。目前有飛行軌道面內(nèi)規(guī)避和垂直于軌道面規(guī)避兩種方法。
鳳凰號任務(wù)和ExoMars 2016著陸任務(wù)均采用軌道面內(nèi)規(guī)避,即在水平速度小于一定閾值時,執(zhí)行整器調(diào)姿,通過沿水平速度反方向產(chǎn)生加速度,實現(xiàn)規(guī)避。
MSL和毅力號任務(wù)采用垂直于軌道面規(guī)避,即不進行速度判斷,均在軌道運動平面外機動300 m距離,防止相互碰撞。相對于軌道面內(nèi)規(guī)避推進劑消耗略有增加,優(yōu)點是邏輯簡單,規(guī)避成功率高。
天問一號任務(wù)借鑒了上述兩種方法,將速度判斷和軌道面外規(guī)避相結(jié)合。在背罩分離后,動力減速用的著陸平臺根據(jù)導(dǎo)航系統(tǒng)獲取的水平速度大小來自主決策是否執(zhí)行背罩規(guī)避,在保證安全的前提下可盡可能降低推進劑消耗。當(dāng)速度小于25 m/s時執(zhí)行類似MSL和毅力號任務(wù)的軌道面外背罩規(guī)避。規(guī)避時結(jié)合粗避障成像過程規(guī)劃的安全區(qū)進一步確定移動區(qū)域,以保證動力下降開始至最終著陸后,傘罩組合體均不會接觸著陸平臺,并兼顧避障需求。
..發(fā)動機關(guān)機
最后接觸火面時關(guān)閉發(fā)動機策略主要包括觸火前關(guān)機和觸火關(guān)機兩種。目前僅有ExoMars2016著陸器設(shè)計為觸火前關(guān)機,美國海盜號、鳳凰號、洞察號、MSL及毅力號任務(wù)均采用觸火關(guān)機。
ExoMars2016任務(wù)在器上判斷著陸器質(zhì)心高度距火面2 m后關(guān)閉發(fā)動機,保證觸火時垂向速度不大于4 m/s。該方法對著陸末期GNC導(dǎo)航高度精度要求較高。
海盜號、鳳凰號及洞察號采用第一個觸火的著陸足墊信號來關(guān)閉發(fā)動機。該方法通過多足墊信號冗余備份保證發(fā)出觸火信號。
MSL和毅力號任務(wù)火星車開始接觸火面后,根據(jù)控制律發(fā)動機推力會逐漸減小,當(dāng)敏感到發(fā)動機推力與動力減速下降級重力相等時(此時火星車完全由火面支撐)時,空中吊車會切斷吊車?yán)|繩,規(guī)避機動約600 m并沿一定彈道遠離墜毀,防止碰撞火星車。該方法針對空中吊車方案定制,整個過程環(huán)節(jié)多,面臨多體控制問題,系統(tǒng)最為復(fù)雜。
天問一號任務(wù)受構(gòu)型布局等約束限制,沒有類似探月任務(wù)配置伽瑪關(guān)機敏感器進行觸火前關(guān)機,而是基于采用的著陸緩沖機構(gòu)選擇了觸火關(guān)機方式,綜合判斷“觸火開關(guān)觸發(fā)數(shù)量”、“觸火過程反推加速度”、“接觸火面計時”三種信息實現(xiàn)在軌安全關(guān)機。通過上述多源關(guān)機信號融合,觸火時禁止羽流方向向下的推力器姿控(降低羽流影響)以及對局部設(shè)備進行熱防護設(shè)計等措施,有效化解了觸火關(guān)機的潛在風(fēng)險。
2 關(guān)鍵環(huán)節(jié)驗證
由于火星與地球環(huán)境條件存在差異,且著陸任務(wù)時序邏輯復(fù)雜,涉及眾多學(xué)科專業(yè),在地面開展火星著陸全系統(tǒng)試驗驗證極為困難;只有部分關(guān)鍵技術(shù)可以在地面模擬接近火星的環(huán)境開展驗證,如發(fā)射探空火箭進行降落傘高空開傘試驗(模擬在火星動壓、馬赫數(shù)條件下開傘過程)以及防熱材料的燒蝕試驗等。因此,國內(nèi)外火星著陸任務(wù)針對上述關(guān)鍵環(huán)節(jié)的設(shè)計驗證都依賴于綜合仿真系統(tǒng)開展全系統(tǒng)仿真分析和半物理測試驗證。而保障全系統(tǒng)仿真分析和半物理測試驗證有效性的關(guān)鍵在于基于試驗獲取精確的關(guān)鍵系統(tǒng)核心參數(shù)并進行全系統(tǒng)建模,本節(jié)將介紹火星著陸任務(wù)關(guān)鍵系統(tǒng)參數(shù)的試驗驗證以及結(jié)合數(shù)學(xué)模型的全系統(tǒng)驗證方法。
2.1 關(guān)鍵系統(tǒng)參數(shù)的試驗驗證
關(guān)鍵的模型參數(shù)包括火星進入器各構(gòu)型狀態(tài)全速域下氣動力熱參數(shù),降落傘展開后全速域下氣動參數(shù)、開傘過程動力學(xué)模型參數(shù)、微波雷達等導(dǎo)航敏感器測量精度、發(fā)動機性能等。
1)進入器氣動力/熱參數(shù)
因火星大氣與空氣存在較大差異,以往地球環(huán)境的研究不能直接推廣至火星環(huán)境,需要有針對性地就氣動問題差異性開展研究,國內(nèi)外普遍采用的方法包括飛行試驗、風(fēng)洞試驗和數(shù)值模擬分析。目前普遍是通過地面風(fēng)洞試驗和數(shù)值模擬分析,獲取完整的一套火星進入過程的氣動參數(shù)。
2)減速降落傘系統(tǒng)性能參數(shù)
試驗項目包括風(fēng)洞試驗、高空開傘試驗等。
風(fēng)洞試驗主要獲取降落傘工作全速域下三軸氣動參數(shù),為動力學(xué)仿真獲取降落傘模型基礎(chǔ)數(shù)據(jù)。
高空開傘試驗主要驗證在火星環(huán)境下開傘時,相應(yīng)馬赫數(shù)、動壓、攻角條件下開傘全過程工作性能,獲取開傘環(huán)節(jié)動力學(xué)模型參數(shù)。
3)微波雷達性能參數(shù)
微波雷達是大底分離后至著陸的關(guān)鍵導(dǎo)航敏感器。根據(jù)在軌飛行彈道包絡(luò),MSL任務(wù)對于微波雷達依次采用固定高塔、直升機、噴氣式戰(zhàn)斗機掛飛等方式,覆蓋不同高度不同速度范圍,實現(xiàn)全工作區(qū)間的測距測速精度、范圍等性能指標(biāo)驗證。
天問一號進入艙的微波雷達開展了基于固定翼飛機、直升機的外場飛行驗證,驗證了不同飛行高度、速度、姿態(tài)下的性能參數(shù)。并根據(jù)仿真分析結(jié)果和外場試驗數(shù)據(jù),建立了微波雷達火面回波數(shù)學(xué)模型,通過模擬回波的電子設(shè)備支持全系統(tǒng)半物理測試驗證。
4)發(fā)動機性能參數(shù)
姿控推力器和主發(fā)動機性能參數(shù)模型依賴于同批次產(chǎn)品的熱試車。與真空工作環(huán)境不同,火星著陸時存在與大氣有相對速度條件下發(fā)動機開機的工作狀態(tài),特別需要關(guān)注并獲取火星表面低氣壓、有來流條件下發(fā)動機的性能參數(shù)。
2.2 結(jié)合數(shù)學(xué)模型的全系統(tǒng)驗證
針對全系統(tǒng)全過程驗證,當(dāng)前國內(nèi)外火星著陸任務(wù)都是通過數(shù)學(xué)仿真和半物理閉環(huán)測試來完成:
1)建立全過程動力學(xué)仿真系統(tǒng)
建立六自由度全系統(tǒng)動力學(xué)仿真模型,包括試驗獲取的氣動參數(shù)、GNC敏感器、發(fā)動機和降落傘工作的數(shù)學(xué)模型,各類算法模型、環(huán)境參數(shù)模型等,通過設(shè)置不同的EDL工況參數(shù),組合不同參數(shù)的誤差,開展數(shù)以萬計的EDL全時序蒙特卡洛打靶仿真,可以充分反映跨系統(tǒng)跨學(xué)科間的相互影響,來輔助關(guān)鍵環(huán)節(jié)設(shè)計過程,確認(rèn)結(jié)果的合理性。
其中針對火星大氣參數(shù)等環(huán)境模型,由于中國沒有大量的在軌觀測數(shù)據(jù),也無法通過地面試驗獲取,需要綜合各種計算模型和影響因素,選擇最大可能的偏差包絡(luò)開展系統(tǒng)設(shè)計,以覆蓋可能的極限條件。后續(xù)隨著天問一號探測器對火星全球及著陸區(qū)附近科學(xué)探測數(shù)據(jù)的積累,可以進一步修正原有的環(huán)境分析模型,逐步縮小偏差范圍。
2)搭建以硬件電子產(chǎn)品為核心的半物理閉環(huán)測試系統(tǒng)
將1)中建立的動力學(xué)環(huán)境模型轉(zhuǎn)換至GNC敏感器等設(shè)備的輸入激勵,將真實的敏感器、計算機等硬件電子產(chǎn)品引入驗證系統(tǒng)回路,進而實現(xiàn)真實時序下的閉環(huán)性能驗證。
在上述動力學(xué)仿真與半物理閉環(huán)測試中,除正常飛行工況外,還需要通過擴大各類模型拉偏范圍,開展極限摸底及制造故障條件,進一步確認(rèn)著陸過程的安全裕度,尋找設(shè)計薄弱環(huán)節(jié)。例如ExoMars 2016著陸任務(wù)失敗,就是傘艙組合體動力學(xué)模型中未充分考慮開傘后可能出現(xiàn)的大動態(tài)環(huán)境,沒有開展相應(yīng)的極限條件摸底,造成故障診斷與系統(tǒng)重構(gòu)設(shè)計及地面驗證不充分。
3 結(jié) 論
本文針對火星著陸關(guān)鍵環(huán)節(jié)涉及的進入方式、進入初始條件、氣動外形與參數(shù)特性、防熱、降落傘彈射及開傘后動態(tài)環(huán)境、大底分離、背罩規(guī)避、著陸發(fā)動機關(guān)機等若干重點問題,對比介紹了國內(nèi)外火星著陸任務(wù)關(guān)鍵環(huán)節(jié)綜合設(shè)計過程與主要參數(shù)結(jié)果,分析了全系統(tǒng)驗證的基本思路和方法。中國成功實施了天問一號火星著陸任務(wù),也充分證明了我們在火星著陸任務(wù)多學(xué)科交叉問題識別、設(shè)計與驗證方面的正確性,可以為后續(xù)火星著陸探測任務(wù)研制提供參考與借鑒。
猜你喜歡
軍事文摘(2023年10期)2023-06-09 09:15:06
空間科學(xué)學(xué)報(2021年4期)2021-08-30 08:31:18
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
河北書畫研究(2016年2期)2016-08-24 02:14:50
新農(nóng)業(yè)(2016年18期)2016-08-16 03:28:27
