履帶式工程機(jī)械轉(zhuǎn)向系統(tǒng)分析
2022-03-26 02:44:04徐成東
一重技術(shù) 2022年1期
關(guān)鍵詞:工程機(jī)械
徐成東
履帶式工程機(jī)械行駛系統(tǒng)包括車架( 機(jī)架) 、懸架和行走裝置。 車架采用整體骨架, 用來安裝所有的總成和部件。 行走裝置負(fù)責(zé)支持車體, 把從動力裝置傳到驅(qū)動輪上的轉(zhuǎn)矩轉(zhuǎn)變?yōu)檐囕v工作所需的驅(qū)動力[1]。 懸架是車架和行走裝置之間互相傳力的連接裝置。 履帶式工程機(jī)械的行走裝置包含兩條與機(jī)器縱軸線平行的履帶, 所以它既無法實(shí)現(xiàn)偏轉(zhuǎn)車輪轉(zhuǎn)向[2、3], 也無法實(shí)現(xiàn)折腰轉(zhuǎn)向[4、5], 只能通過兩側(cè)履帶驅(qū)動鏈輪的轉(zhuǎn)速差實(shí)現(xiàn)轉(zhuǎn)向, 這種方式稱為差速轉(zhuǎn)向[6]。
1 轉(zhuǎn)向原理分析與計(jì)算
履帶行走裝置主要由驅(qū)動鏈輪、 導(dǎo)向輪、 支重輪、 托帶輪、 履帶等組成( 見圖1) 。 車輛行駛時(shí), 驅(qū)動鏈輪接受傳動系統(tǒng)傳遞過來的動力, 依靠履帶板與地面之間穩(wěn)固的附著力產(chǎn)生驅(qū)動力,進(jìn)而傳遞給行走架和車架, 從而帶動整車行走。圖中vL代表左側(cè)鏈輪的行走速度; vR代表右側(cè)鏈輪的行走速度。 顯然, 當(dāng)兩側(cè)驅(qū)動鏈輪的行走速度相等時(shí), 車輛成直線行駛狀態(tài)。
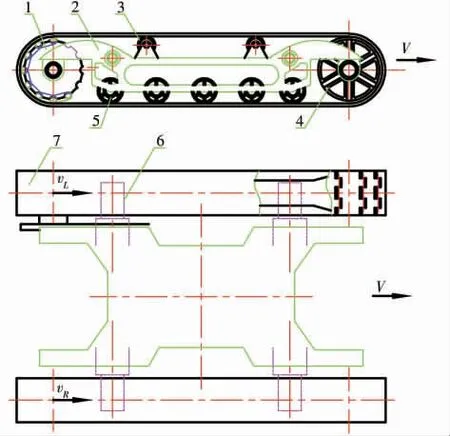
圖1 履帶式工程機(jī)械行走裝置
當(dāng)車輛需要轉(zhuǎn)向時(shí), 兩側(cè)的驅(qū)動鏈輪呈現(xiàn)出不等的速度( 見圖2) 。 左、 右鏈輪沿著車輛的縱向中心線對稱分布, 左鏈輪行走速度vL和右鏈輪行走速度vR兩者互相平行, 且它們的方向垂直于左、右鏈輪的軸線。 由剛體的平面運(yùn)動可知, 當(dāng)vL和vR大小不等時(shí), 車輛的速度瞬心必然位于兩側(cè)鏈輪的軸線與vL和vR矢量端點(diǎn)連線的交點(diǎn)上( 見圖2(a))[7]。 如圖所示, O 點(diǎn)即為車輛轉(zhuǎn)向時(shí)的速度瞬心, 也就是轉(zhuǎn)向中心, 設(shè)定兩側(cè)鏈輪的輪距為B, 則vL、 vR、 B 和轉(zhuǎn)向半徑R( 外側(cè)驅(qū)動鏈輪與轉(zhuǎn)向中心之間的距離) 存在如下數(shù)學(xué)關(guān)系:
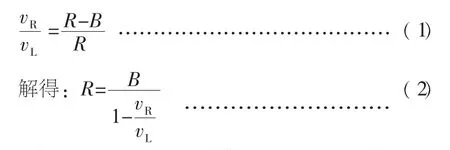
由式(2) 看出, 履帶式工程機(jī)械轉(zhuǎn)向半徑的大小與左、 右驅(qū)動鏈輪速度vR、 vL的絕對大小無關(guān), 而與兩者的比值有關(guān)。 要改變轉(zhuǎn)向半徑, 只需要改變兩側(cè)速度的比值即可。 如果因?yàn)樽鳂I(yè)場地空間狹窄或其它原因需要在較小范圍內(nèi)轉(zhuǎn)向時(shí), 可以將右側(cè)鏈輪制動, 僅僅依靠左側(cè)鏈輪的速度實(shí)現(xiàn)轉(zhuǎn)向, 轉(zhuǎn)向中心(速度瞬心) O 即位于右側(cè)鏈輪的幾何中心。 由式(2) 可知, 轉(zhuǎn)向半徑R 的大小為兩側(cè)驅(qū)動鏈輪的輪距B( 見圖2(b)) 。 履帶式工程機(jī)械轉(zhuǎn)向的另外一種情況就是原地轉(zhuǎn)向( 見圖2(c)), 此時(shí)轉(zhuǎn)向中心( 速度瞬心) O 位于兩側(cè)驅(qū)動鏈輪的對稱中心點(diǎn)上。 左、 右側(cè)鏈輪的速度vR、vL大小相等, 方向相反, 兩者的比值為負(fù)值。 由式(2) 可知, 原地轉(zhuǎn)向時(shí)的轉(zhuǎn)向半徑R 為兩側(cè)驅(qū)動鏈輪的輪距B 的一半。 需要指出的是, 由于履帶式行走裝置的特殊結(jié)構(gòu), 原地轉(zhuǎn)向時(shí)因履帶側(cè)滑等因素帶來的轉(zhuǎn)向阻力會大大增加, 能否實(shí)現(xiàn)原地轉(zhuǎn)向受到行走裝置多個(gè)運(yùn)動參數(shù)的影響[8]。
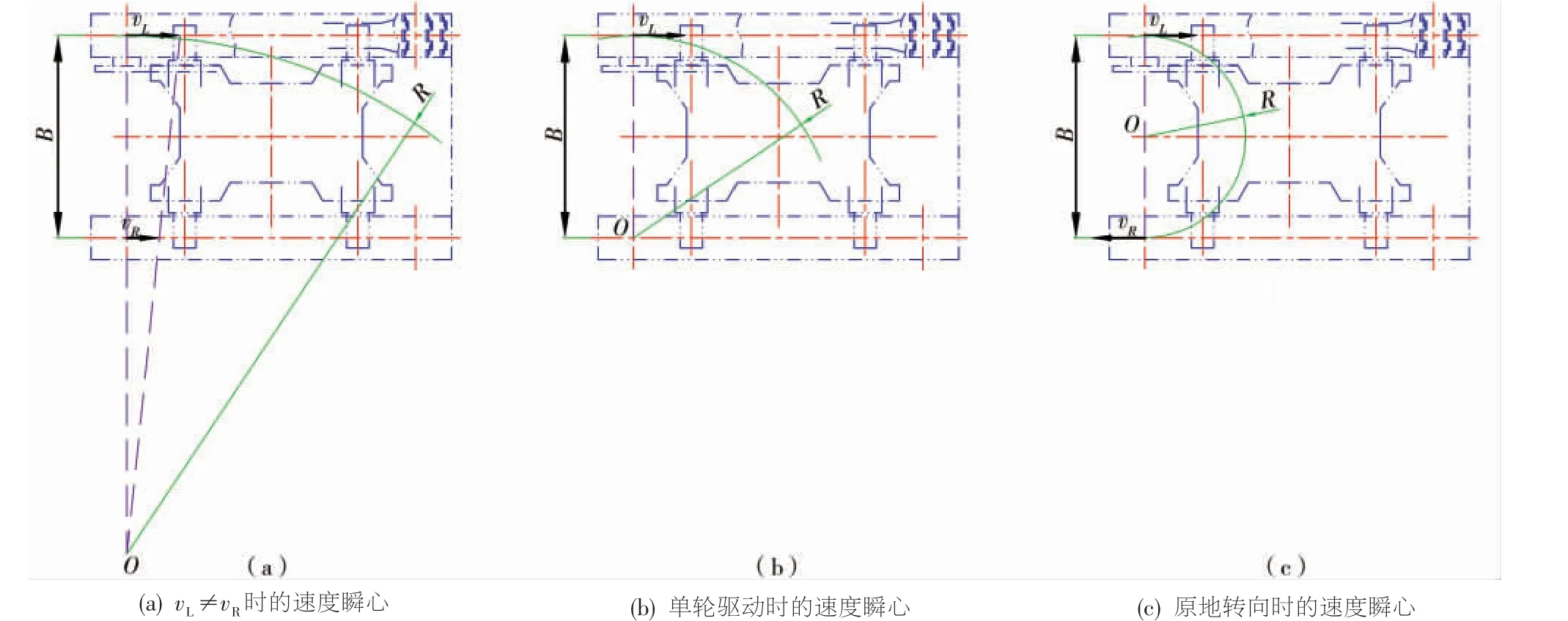
圖2 轉(zhuǎn)向原理示意圖
2 轉(zhuǎn)向的操縱控制
目前, 履帶式工程機(jī)械的傳動系統(tǒng)主要采用機(jī)械傳動、 液力機(jī)械傳動、 液壓傳動三種形式。 機(jī)械傳動系統(tǒng)主要由離合器、 變速器、 驅(qū)動橋等構(gòu)成;液力機(jī)械傳動系統(tǒng)主要由液力變矩器、 變速器、 驅(qū)動橋等構(gòu)成。 而采用液壓傳動的工程機(jī)械稱為全液壓式工程機(jī)械。 對于采用機(jī)械傳動和液力機(jī)械傳動系統(tǒng)的履帶式底盤, 為了轉(zhuǎn)向方便, 設(shè)計(jì)驅(qū)動橋時(shí)均包含轉(zhuǎn)向離合器, 通過操縱控制轉(zhuǎn)向離合器可以實(shí)現(xiàn)轉(zhuǎn)向。 對于全液壓履帶式工程機(jī)械, 通過操縱控制換向閥對行走馬達(dá)進(jìn)行調(diào)速, 進(jìn)而調(diào)節(jié)左、 右驅(qū)動鏈輪的速度, 形成轉(zhuǎn)速差, 轉(zhuǎn)向得以實(shí)現(xiàn)。
2.1 機(jī)械傳動(液力機(jī)械傳動)
采用機(jī)械傳動(液力機(jī)械傳動) 時(shí), 驅(qū)動橋采用機(jī)械傳動( 見圖3) 。 履帶式推土機(jī)驅(qū)動橋及轉(zhuǎn)向液壓系統(tǒng)在執(zhí)行直線行走時(shí), 左、 右轉(zhuǎn)向離合器( 常閉式) 處于接合狀態(tài), 來自變速箱的動力經(jīng)過主減速器分別傳給左、 右轉(zhuǎn)向離合器, 再經(jīng)過最終傳動裝置分別傳給左、 右驅(qū)動鏈輪。 在此狀態(tài)下,轉(zhuǎn)向液壓泵輸出的油液經(jīng)過左、 右轉(zhuǎn)向控制閥的常態(tài)位, 再經(jīng)由調(diào)壓閥的旁油路進(jìn)入變速箱進(jìn)行強(qiáng)制潤滑, 潤滑壓力由背壓閥調(diào)節(jié)。
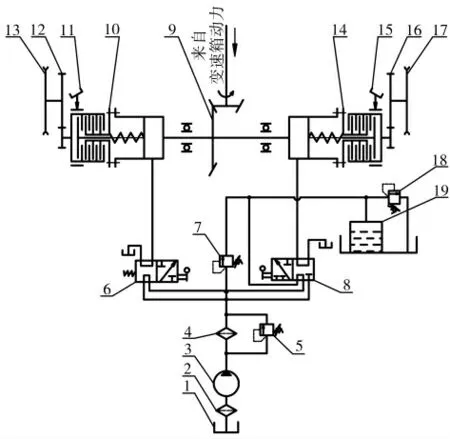
圖3 履帶式推土機(jī)轉(zhuǎn)向操縱控制示意圖
當(dāng)推土機(jī)需要轉(zhuǎn)向時(shí), 駕駛員可通過操縱轉(zhuǎn)向控制閥完成轉(zhuǎn)向。 以右轉(zhuǎn)向?yàn)槔?駕駛員操縱右轉(zhuǎn)向控制閥的手柄, 控制閥切換到左工作位。 轉(zhuǎn)向液壓泵輸出的壓力油進(jìn)入右轉(zhuǎn)向離合器的接盤液壓缸, 克服彈簧阻力, 推動活塞伸出, 主動鼓和從動鼓完全或者部分脫開, 右轉(zhuǎn)向離合器處于完全脫離或者半聯(lián)動狀態(tài)。 此時(shí), 右驅(qū)動鏈輪因?yàn)閯恿οЩ蛘邷p小, 速度開始下降, 左驅(qū)動鏈輪則繼續(xù)接受主減速器傳遞的動力。 左、 右驅(qū)動鏈輪因行走速度的差異迫使車架連同履帶開始向右轉(zhuǎn)向, 轉(zhuǎn)向半徑可由式(2) 求得。 當(dāng)需要以較小的半徑轉(zhuǎn)向時(shí),可在右轉(zhuǎn)向離合器動力脫開后通過制動器將右驅(qū)動鏈輪制動, 此時(shí)左驅(qū)動鏈輪將以右驅(qū)動鏈輪為中心轉(zhuǎn)動, 轉(zhuǎn)向半徑為兩側(cè)鏈輪的輪距B。 需要指出的是, 雖然轉(zhuǎn)向離合器具有脫開動力的功能, 但卻不能反向傳遞動力, 即兩側(cè)鏈輪不能反向轉(zhuǎn)動, 因而無法實(shí)現(xiàn)原地轉(zhuǎn)向。
2.2 液壓傳動
全液壓履帶式工程機(jī)械的轉(zhuǎn)向通過液壓傳動實(shí)現(xiàn)。 典型的全液壓履帶式挖掘機(jī)傳動系統(tǒng)由兩臺液壓泵、 左、 右行走馬達(dá), 以及左、 右兩側(cè)的換向閥構(gòu)成雙泵雙回路液壓系統(tǒng)( 見圖4)[9]。 液壓泵的壓力油經(jīng)過換向閥進(jìn)入行走馬達(dá), 行走馬達(dá)輸出轉(zhuǎn)矩和轉(zhuǎn)速, 通過減速器驅(qū)動鏈輪轉(zhuǎn)動, 產(chǎn)生驅(qū)動力。 駕駛員操縱兩側(cè)的手動換向閥, 使左、 右行走馬達(dá)等速同向轉(zhuǎn)動, 左、 右驅(qū)動鏈輪等速前進(jìn)或者后退, 挖掘機(jī)執(zhí)行直線行走。 當(dāng)需要右轉(zhuǎn)向時(shí), 駕駛員操縱右側(cè)手動換向閥, 調(diào)節(jié)換向閥的開口度,調(diào)節(jié)進(jìn)入右行走馬達(dá)的流量[10], 降低其轉(zhuǎn)速[11]。此時(shí), 左側(cè)手動換向閥仍處于較大開口度, 則左行走馬達(dá)行走速度較快, 右行走馬達(dá)行走速度較慢,使左、 右驅(qū)動鏈輪速度不等, 實(shí)現(xiàn)差速轉(zhuǎn)向。 由于履帶式挖掘機(jī)行走速度較慢且行走阻力較大, 當(dāng)駕駛員將右側(cè)手動換向閥置于中位時(shí), 右行走馬達(dá)停止轉(zhuǎn)動[12], 左驅(qū)動鏈輪將圍繞右驅(qū)動鏈輪驅(qū)動整車轉(zhuǎn)向, 轉(zhuǎn)向半徑為兩側(cè)鏈輪的輪距B。 當(dāng)挖掘機(jī)需要原地轉(zhuǎn)向時(shí), 駕駛員只需將兩側(cè)的手動換向閥置于相反的工作位且將開口度調(diào)節(jié)至最大值, 則左、 右行走馬達(dá)等速反向轉(zhuǎn)動, 左、 右驅(qū)動鏈輪速度大小相等, 方向相反, 使挖掘機(jī)實(shí)現(xiàn)原地轉(zhuǎn)向,轉(zhuǎn)向半徑為兩側(cè)鏈輪輪距B 的一半。
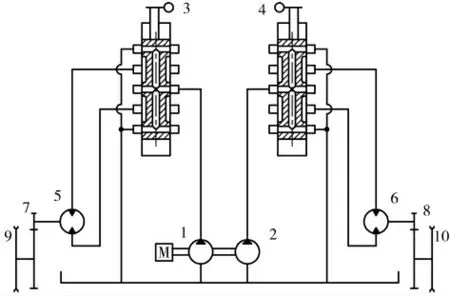
圖4 全液壓履帶式挖掘機(jī)傳動系統(tǒng)
3 結(jié) 語
無論采用機(jī)械傳動( 液力機(jī)械傳動) , 還是采用全液壓傳動, 履帶式工程機(jī)械均是通過兩側(cè)驅(qū)動鏈輪的轉(zhuǎn)速差實(shí)現(xiàn)轉(zhuǎn)向, 但兩者的操縱控制方法存在差異, 轉(zhuǎn)向工作過程也不相同, 由于轉(zhuǎn)向半徑取決于兩側(cè)驅(qū)動鏈輪速度之比, 要求駕駛員具有一定的工作經(jīng)驗(yàn)。
猜你喜歡
商品與質(zhì)量(2021年43期)2022-01-18 05:27:58
銅業(yè)工程(2021年2期)2021-06-27 10:36:24
裝備制造技術(shù)(2021年1期)2021-05-21 07:55:10
銅業(yè)工程(2021年1期)2021-04-23 01:45:08
石油商技(2021年1期)2021-03-29 02:35:54
表面工程與再制造(2019年1期)2019-12-04 15:10:07
山東冶金(2019年2期)2019-05-11 09:12:02
山東冶金(2019年2期)2019-05-11 09:12:00
汽車觀察(2018年9期)2018-10-23 05:46:44
專用汽車(2015年1期)2015-03-01 04:04:39
