GPS在自移橋式布料機控制系統中的應用
2022-03-28 17:42:23周飛舟,付延濤,辜小川
黃金 2022年3期
關鍵詞:RTK技術
周飛舟,付延濤,辜小川

摘要:為實現大型礦用自移橋式布料機運行時自移式布料橋的7臺自行履帶車在堆浸場水平方向多角度多方向同步行走、自移式布料橋和可移置膠帶機卸料小車同步行走時位移和角度的高度一致性,并控制移動式卸料小車在自移式布料橋上方軌道的行走區間和不同位置處的行走速度。在布料機上安裝GPS接收機,采用基于實時動態載波相位差分技術的GPS精確定位4臺GPS接收機的位置坐標,PLC控制器將GPS接收機的位置信息轉換為堆浸場坐標值,并通過與DP通訊連接傳送位置信息,最終通過在軟件中編程實現自移式布料橋多自行履帶車同步行進和各組件協同工作,減少了布料橋整體行走時的機械故障率,每年可節約成本約13萬美元。
關鍵詞:GPS;自移橋式布料機;RTK技術;坐標系;PLC
中圖分類號:TD676 文章編號:1001-1277(2022)03-0050-05
文獻標志碼:Adoi:10.11792/hj20220311
引 言
GPS(Global Positioning System)即全球定位系統,在使用GPS進行定位時,會受到各種因素(如衛星星歷誤差、衛星鐘差誤差、傳播誤差等)的影響,為消除誤差源得到更高的定位精度,常采用差分GPS技術[1]。自移橋式布料機(下稱“布料機”)用于散裝物料的堆置,移動工作時對各自行履帶車和關鍵移動部位定位精度要求高。
萬寶礦產(緬甸)萊比塘銅礦(下稱“萊比塘銅礦”)選礦廠現有2臺生產能力6 000 t/h的布料機,布料機結構龐大,控制系統復雜。
因此,萊比塘銅礦定位系統采用實時動態載波相位差分(Real-Time Kinematic,RTK)技術,該技術需根據現場測點數量布置若干套GPS定位設備,每套GPS定位設備包含2臺接收機,其中一臺作為基準站,另外一臺則作為流動站[2],多點測量時流動站可以共用1個基準站。
采用瑞士徠卡公司的GS10定位設備,GS10采用無線傳輸方式接收RTK數據,基準站和流動站之間選用芬蘭SATEL公司的GFU27無線數傳電臺傳輸數據。依據RTK技術對基準站的選址要求[2-3],在堆浸場正前方設置一個基準站,置于塔臺頂端,實時向布料機上的4臺流動站發送其接收到的載波相位信號[3]。
GPS工作時,所有接收機都在觀測衛星數據,基準站把接收的載波相位信號傳給流動站,流動站在接收衛星信號的同時也接收基準站信號,在這2個信號的基礎上,流動站上的內置軟件就可以實現差分運算,精確定位出基準站與流動站的空間相對位置[2]。采用RTK技術測量可使GPS定位精度達到厘米級[2-3]。
1 工程背景
萊比塘銅礦是亞洲最大濕法冶金銅礦山之一,年生產陰極銅10萬t,采用“露天開采—破碎—運輸—堆浸—萃取—電積”的生產工藝。其選礦廠負責礦石的“破碎—運輸—筑堆”工序,年處理礦石1 800萬t,采用布料機對處理后的礦石進行筑堆,布料機工作在露天銅礦的永久堆浸場內,位于礦石“開采—破碎—運輸—堆浸”物料流的最末端。堆浸場被平均劃分成數十個并排的矩形堆浸單元,布料機將破碎后的礦石經膠帶輸送機均勻筑堆在堆浸單元,并通過履帶的自行移動和膠帶輸送機的移設使筑堆范圍能夠覆蓋整個堆浸場[1]。單臺布料機設自行履帶車11臺,生產和移設時因受工藝要求和工況變化影響,4大組成部件移動時刻處于不同狀態。國內對大型礦用移動設備的應用中鮮有對布料機的應用,目前只在智利埃斯康迪達銅礦和萊比塘銅礦中有所應用[4-5]。
為提高布料機布料橋上7臺自行履帶車在永久堆浸場筑堆中移動的同步性,以及4大組成部件在堆浸場平面直角坐標系x、y坐標方向上的協同性,在每臺布料機上配置4套GPS衛星定位設備對其關鍵部位進行實時定位,獲取的位置信息通過PROFIBUS DP現場總線通訊進入PLC,通過編程控制解決了大型礦用布料機多履帶和多組成部件之間移動同步性和協同性難以實現高精度控制的問題。
2 布料機工作原理及控制系統
2.1 結構及工作原理
布料機由長800 m的可移置膠帶輸送機(Conveyor Volume,CV)、跨越在CV上方的可移置膠帶機卸料小車(Tripper Control Car,TCC)、長350 m的自移式布料橋(Mobile System Bridge,MSB)及位于MSB上方的移動式卸料小車(Tripper Car/Stacker,TCS)等4部分組成(如圖1所示)[4]。其中,MSB由7臺自行履帶車支撐,可以整體多角度行走,布料時MSB的7臺自行履帶車必須保持在同一水平線上同步行走。TCC和CV頭部驅動站各由2臺自行履帶車支撐其自由移動。
經過破碎后的礦石從上游供料膠帶輸送機轉運至布料機的CV上,由CV轉運到TCC,再通過TCC的下料口落至MSB頭部受料膠帶的正上方,最后轉運至TCS并選擇單側布料。當MSB的一側布完礦石完成筑堆后,MSB的7臺自行履帶車載著MSB和TCS按設定步長自動后退到下個相鄰區域繼續布料,TCC則跟隨MSB自動同步移動[4]。
為確保布料機的MSB和TCC自動行走時能夠精準同步,在MSB的1號自行履帶車、7號自行履帶車和TCC下料口處各配置1套GS10定位設備來獲取3個測點的位置信息;為了控制TCS布料筑堆時點位的分布和TCS在MSB上方軌道行走的區間及速度,在TCS上方布置1臺GS10定位設備來獲取TCS在MSB上的水平位置。
2.2 控制系統
布料機控制系統由CV控制系統、TCC控制系統、MSB控制系統(包含TCS從站)和MSB的7臺自行履帶車控制系統等10個主控制系統組成,均采用西門子S7-300 PLC作控制器。各控制系統之間采用西門子PROFIBUS現場總線連接,采用DP通訊交換數據,4套GPS接收機輸出的是基于RS232串行數據接口標準的信號,需先通過西門子網關DP/RS232C Link將其轉換為基于RS485物理接口的PROFIBUS DP信號,然后再經過中繼器進入相應的控制器,布料機控制系統如圖2所示,圖中包含了遠程監控系統采用的ProfiNet通訊。
3 工程應用
3.1 GPS在控制系統中的硬件組態
采用西門子Step7編程軟件,分別將MSB和TCC控制系統的CPU作為主站,將GPS定位接收機GS10作為從站掛在主站上。布料機上共布置4個GPS,需分別在TCC控制系統和MSB控制系統上組態,GPS在TCC控制系統中的硬件組態如圖3所示,地址為20,其在MSB控制系統中的硬件組態同理。
3.2 GPS在控制系統中的軟件實現
3.2.1 GPS定位數據分析
美國國家海洋電子協會(National Marine Electronics Association,NMEA)是數據傳輸標準工業協會的一個協議集,GS10輸出的數據遵循NMEA協議標準[6]。接收機輸出的標準信息有幾種不同的格式,常用的有GGA、GSA、POS、LLK、LLQ、GLL和GGK等[6-7]。其中,LLK和LLQ是瑞士徠卡公司專用的協議數據格式,現場GPS系統采用LLQ語句格式輸出數據[6-7]。
3.2.2 初始數據獲取
在Step7編程環境中編制一個帶有背景數據塊的功能塊FB,FB程序代碼采用SCL語言編寫,用于解算每個定位設備GS10所在位置的經度、緯度、高度、數據質量、數據精度和衛星個數等數據[6-7]。PLC通過在編程軟件中建立專用功能FC調用FB,讀取GS10中的數據,FB程序代碼關鍵部分如下:
1)數據采集部分。GS10接收到的數據以字節為單位分成5組,每組2個字節包含16個位,PLC從第0位開始依次循環讀取,讀取的MESSAGE作為PLC的輸入。
FOR i:=0 TO 79 DO
MESSAGE[i]:=BYTE_TO_CHAR(PIB[FIRST_PEB+i]);
END_FOR;
其中,FIRST_PEB是PLC讀取GS10時定義的接口起始地址,在硬件組態部分對每個GS10從站進行定義。
2)判斷數據ID。PLC讀取GS10數據后,查詢判斷數據的第3,4,5和0位是否和LLQ語句的ID內容相符合,只要有1個位不對應,就判定該數據無效,返回無效代碼。
IF((MESSAGE[3]<>L)OR(MESSAGE[4]<>L)OR(MESSAGE[5]<>L)OR(MESSAGE[0]<>))
THEN
RES_CODE_NMEA_TYPE:=9000;
END_IF;
3)讀取經度值。在79個字符位中確定經度邊界區間,然后在此區間內確定經度字符區域所占的總位數,把該區間內的位分成L1和L2兩段,并將其由字符型轉換成整型,定義前半段整型數值為x(i),后半段為y(i)。獲取經度值過程如下:
FOR i:=1 TO L1 DO
EM:=(x(i)-48)×e(L1-1)×2.302585+EM
END_FOR;
FOR i:= 1TO L2 DO
EMM:=(y(i)-48)×e(L2-1)×2.302585+EMM
END_FOR ;
ER:=(EM-ΔΕ)+EMM/eL2×2.302585
其中,ΔΕ為GS10流動站相對GPS基準站的偏差補償值,ER為PLC從GS10中讀取的經度值。PLC讀取緯度值和高度值過程與此原理相同。
3.2.3 坐標變換
初始數據獲取到的經度、緯度、高度等數據是在GS10中由WGS-84坐標投影到UTM(通用橫墨卡托格網系統)坐標系中的數值,需將其轉換成現場需要的堆浸場坐標值[8-10]。
以布料機的CV頭部驅動站為原點,MSB為x軸,CV為y軸,建立一個堆浸場坐標系,選取CV首尾中心線(無限接近)兩點為公共控制點,采用移動式手持測量GPS接收機測出兩點的WGS-84坐標值,然后將其導入GPS觀測手簿中,通過手簿的程序處理軟件將WGS-84坐標轉換成UTM坐標值,在Step7編程環境中創建一個功能FC,分別將2個公共控制點的UTM坐標值和從4個GS10中獲取的坐標值加載到FC輸入側中,PLC通過4次調用FC,即可自動計算出4個GS10定位設備在堆浸場坐標系中的x、y、z值,通過編寫控制算法程序,就可以控制布料機運行。FC程序采用STL語言編寫,通過執行代碼即可獲得每個GS10接收器在堆浸場坐標系中的x、y坐標值,具體算法如下[8-10]:
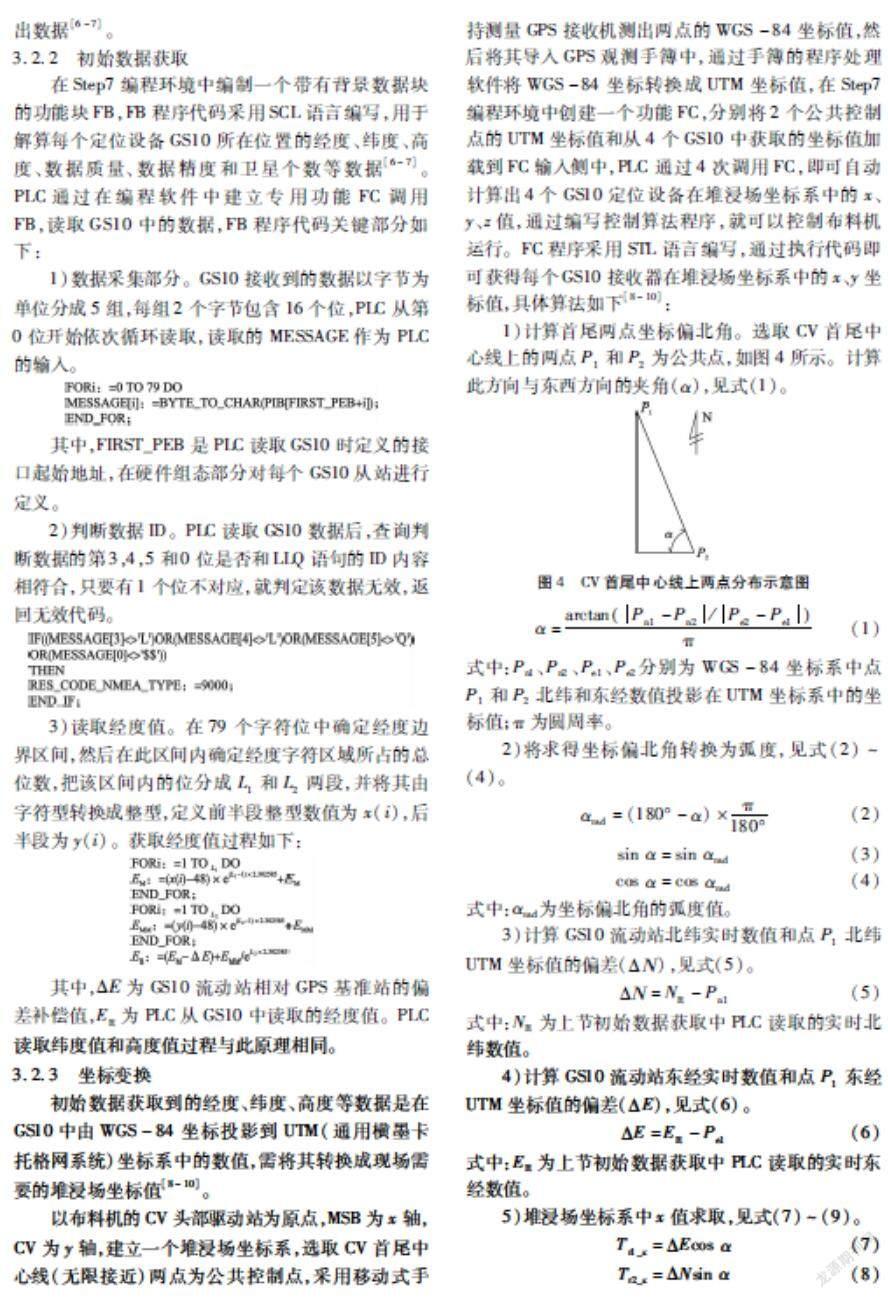
1)計算首尾兩點坐標偏北角。選取CV首尾中心線上的兩點P1和P2為公共點,如圖4所示。計算此方向與東西方向的夾角(α),見式(1)。
α=arctanPn1-Pn2/Pe2-Pe1π(1)
式中:Pn1、Pn2、Pe1、Pe2分別為WGS-84坐標系中點P1和P2北緯和東經數值投影在UTM坐標系中的坐標值;π為圓周率。
2)將求得坐標偏北角轉換為弧度,見式(2)~(4)。
αrad=(180°-α)×π180°(2)
sin α=sin αrad(3)
cos α=cos αrad(4)
式中:αrad為坐標偏北角的弧度值。
3)計算GS10流動站北緯實時數值和點P1北緯UTM坐標值的偏差(ΔΝ),見式(5)。
ΔΝ=NR-Pn1(5)
式中:NR為上節初始數據獲取中PLC讀取的實時北緯數值。
4)計算GS10流動站東經實時數值和點P1東經UTM坐標值的偏差(ΔE),見式(6)。
ΔE=ER-Pe1(6)
式中:ER為上節初始數據獲取中PLC讀取的實時東經數值。
5)堆浸場坐標系中x值求取,見式(7)~(9)。
Tr1_x=ΔEcos α(7)
Tr2_x=ΔNsin α(8)
x=Tr1_x+Tr2_x(9)
式中:Tr1_x和Tr2_x分別為GS10流動站獲取的經緯度值相對于公共點東向偏差和北向偏差在堆浸場坐標系x坐標方向的分量。
6)堆浸場坐標系中y值求取,見式(10)~(12)。
Tr1_y=ΔEsin α(10)
Tr2_y=ΔNcos α(11)
y=Tr1_y-Tr2_y(12)
式中:Tr1_y和Tr2_y分別為GS10流動站獲取的經緯度值相對于公共點東向偏差和北向偏差在堆浸場坐標系中y坐標方向的分量。
3.3 控制方案應用
通過數據獲取和坐標變換2個重要步驟,即可獲取MSB首尾自行履帶車、TCC下料口和TCS卸料小車在堆浸場平面坐標系中的準確位置。
通過在主程序OB1或新建的FC中編寫控制命令控制TCS在MSB上方的布料點,實現逐點連續布料,并在TCS行走到靠近MSB的1號和7號自行履帶車上方位置時提前降低速度,以免失控造成事故。該方案取代了最初在TCS上安裝編碼器控制TCS行走距離和速度的方案。
通過在主程序OB1或再次新建的FC中編寫控制命令分別控制MSB和TCC的同步及MSB 7臺自行履帶車的同步。布料時需要控制TCC的y坐標值與MSB頭部1號自行履帶車的y坐標值,保證坐標值偏差持續穩定,如果出現偏差,PLC則根據偏差大小自動調節TCC自行履帶車的速度,避免了TCC和MSB同步行走偏差過大導致的故障停機,實現了布料機生產時TCC下料口和MSB受料口位置的相對固定,可以保證下料的連續性,不會發生漏料或者跑料的情況,該方案取代了最初在TCC下料口x、y、z方向安裝超聲波傳感器定位MSB受料漏斗位置的方案。當布料機在堆浸場布料筑堆時,程序通過計算MSB 1號自行履帶車的x、y坐標值和7號自行履帶車的x、y坐標值的偏差,自動調節7臺自行履帶車運行速度和角度,從而實現MSB 7臺自行履帶車在堆浸單元的直行、轉彎行走、90°旋轉行走、扇形布料等多種運行軌跡下的同步控制,大大減少甚至完全避免了MSB整體行走時的機械故障。
將GPS應用在現場2臺布料機中,保證了大型布料機生產和移設時多自行履帶車之間、多移動從屬部件之間位移和角度變化的同步,應用效果良好,故障率低。由最初設計GPS只用于MSB布料橋上7臺自行履帶車多種運行軌跡下的同步行走控制擴展到在TCC和TCS上的改造應用,相比最初使用絕對值編碼器和超聲波傳感器等定位方案,在TCC和TCS安裝GPS后,只需一個電氣技師在布料機停產移設時對GPS進行檢查即可,省去日常對傳感器及使用環境的維護。由于GPS安裝的固定性和RTK技術的厘米級定位精度,布料機生產時TCC受料斗自動跟隨MSB下料斗同步行走,不會造成明顯偏差導致漏料,省去了每班人工巡檢和頻繁校正受料口位置。采用絕對值編碼器和超聲波傳感器時,不僅安裝困難而且容易受到濕礦黏結影響,安裝維護均需要工人高空作業。使用GPS代替傳統傳感器應用效果如表1所示。
4 結 語
通過將采用實時動態載波相位差分技術的GPS設備布置在MSB的1號自行履帶車、7號自行履帶車、TCC下料口和TCS上方,實現對布料機4大組成部件位置信息的精準定位,并通過編寫程序實現對布料機的自動化控制,可有效控制MSB上7臺自行履帶車在堆浸單元中直行、轉彎行走、90°旋轉行走、扇形布料等多種運行軌跡。在萊比塘銅礦的應用效果良好,機械故障率低,每年可節約成本約13萬美元。
[參 考 文 獻]
[1] 徐紹銓,張華海,楊志強,等.GPS測量原理及應用[M].4版.武漢:武漢大學出版社,2017.
[2] 謝鋼.GPS原理與接收機設計[M].北京:電子工業出版社,2017.
[3] 張冠軍,張志剛,于華.GPS RTK測量技術實用手冊[M].北京:人民交通出版社,2014.
[4] 張玨.礦用布料機的筑堆和移設[J].機械管理開發,2020,35(1):60-62.
[5] 張俊,辜小川,趙瓊.自移橋式布料機在萊比塘銅礦的應用[J].世界有色金屬,2018(18):1-3.
[6] LEICA GEOSYSTEMS A G.Leica viva series technical reference manual[M].Heerbrugg:Switzerland,2014.
[7] GEOMAR SOFTWARE INC.RT38-MK2 map[M].Mississauga:Canada L4Y 2S4,2014.
[8] 周朝憲,董少波,和志軍,等.自定義坐標系的建立及其坐標變換實現[J].地質與勘探,2015,51(4):699-704.
[9] 吳迪軍.UTM投影地區工程獨立坐標系的建立方法[J].測繪工程,2020,29(4):7-10,14.
[10] 王海蚌.國外坐標系的特點及在地質勘查中的應用[J].礦產勘查,2020,11(4):718-725.
Application of GPS to the control system of self-mobilized bridge spreader
Zhou Feizhou1,2,Fu Yantao1,2,Gu Xiaochuan1,2
(1.Wanbao Mineral Co.,Ltd.; 2.Wanbao Mineral(Burma)Copper Industry Co.,Ltd.)
Abstract:GPS receiver is installed on the self-mobilized bridge spreader,in order to achieve multi-angle and multi-directional synchronized movement of 7 self-moving crawlers on self-mobilized bridge spreader bridge along horizontal direction of heap leaching field,high consistency of displacement and angle during the synchronized movement of the discharge cart on self-mobilized spreader bridge and movable seal tape machine,and control the moving speed of mobile discharge cart on the moving section on the tracks above the self-mobilized spreader bridge and on different locations,when large-scale self-mobilized spreader is operational.The location coordinates of 4 GPS receivers are precisely located by GPS based on real-time kinematic technology.PLC controller converts the location information of GPS receivers into numbers on the heap leaching field coordinate system,and transmits location information by connecting DP communications.Finally,synchronized movement of multiple self-moving crawlers on self-mobilized spreader bridge and synergic operation between each component are realized by software programming,the rate of mechanical failure during the overall movement of spreader bridge is reduced,and the annual cost can be saved by about 130 000 dollars.
Keywords:GPS;self-mobilized bridge spreader;RTK technology;coordinate system;PLC
猜你喜歡
中國高新技術企業(2016年35期)2017-02-10 17:06:33
環球人文地理·評論版(2016年5期)2017-01-03 02:35:45
科教導刊·電子版(2016年20期)2016-10-20 17:44:43
科技視界(2016年6期)2016-07-12 11:31:55
中國科技博覽(2016年12期)2016-05-09 04:07:55
中國科技博覽(2016年14期)2016-04-25 02:22:19