微動探測方法研究及應用
2022-03-28 07:27:22汶小崗
陜西煤炭 2022年2期
關鍵詞:深度
王 輝,汶小崗,2,李 亮,喬 會
(1.陜西省煤田物探測繪有限公司,陜西 西安 710005;2.自然資源部煤炭資源勘查與綜合利用重點實驗室,陜西 西安 710026)
0 引言
微動探測技術可以分為微動單點測深以及微動二維剖面探測2種。在實際勘探中,對于2種方法的選擇,應根據探測目的及2種方法自身的特點來確定[1-3]。
微動單點測深是從微動信號中提取頻散曲線,然后給定一個初始模型,模型信息包括層數、各層厚度、泊松比、S波速度范圍等,通過反演得到勘探區下方的S波速度結構。
微動二維剖面探測是從各個單點提取頻散曲線后,對各個單點給定初始模型,然后進行反演,得到單點下的速度-深度模型,再將所有單點的速度值進行內插,通過插值光滑處理連成剖面,獲得勘探區下方的速度-深度剖面。相對于單點測深,二維剖面能清楚、直觀地反映出地下地層的變化以及不良地質體等,便于對地下介質結構進行分析[4-6]。
1 微動勘探原理
通過從天然源微動信號中提取面波的頻散曲線,然后假定計算的初始模型進行反演,進而求得相對應的S波的速度,得到地下單點S波速度結構或S波速度剖面。從微動信號中提取面波(瑞雷波)頻散曲線的方法主要有SPAC法(空間自相關法)、F-K法(頻率-波數法)及H/V法(譜比法)等[7-8]。空間自相關法對于微動臺站的布設要求比較嚴格,各個臺站需均勻布設在同心圓的圓周之上,圓心處同時布設臺站,在野外障礙物較多的復雜地形以及城市地形的情況下,很難滿足要求[9]。因此在空間自相關法的基礎上,對該方法進行了改進擴展,得到了擴展空間自相關法(ESPAC法),ESPAC法對于臺陣的布設無特殊要求,簡單靈活,對于復雜地形的適應能力更好[10]。F-K法的臺陣布設也相對靈活,但需要布設數量較多的臺陣才能滿足要求,在目的層較深的情況下,需要的臺陣數量大,施工難度增加。
1.1 空間自相關法(SPAC法)
空間自相關法微動觀測臺陣要求將各個接收點均勻的布設在圓周之上,同時在圓心處也布設接收點。使用SPAC法進行頻散曲線提取,假設微動勘探過程是一個平穩隨機的過程[11],且微動信號是以固定速度傳播的微動波。
μ(x,y,t)=∑∑Anmexp(ikncosθm+
iknyscosθm)sin(ωnt)
(1)

波在t時刻的空間自相關函數φ(ξ,η,t)可以定義為

(2)
微動信號的振幅隨著時間t位置的變化而變化,但是其統計性質關于時間是不會變化的。在理想情況下,微動空間自相關函數的系數定義為
(3)
式中,J0(χ)為第1類零階貝塞爾函數;k為波數;c(ω0)為角頻率ω0的面波相速度,即
(4)
空間自相關法通過獲得角頻率ω0不同時刻的空間自相關系數,即可獲得頻率不同的面波傳播速度c(ω0),進而獲得瑞雷波的頻散曲線。
1.2 擴展空間自相關法(ESPAC法)
ESPAC法(擴展空間自相關法)的臺陣布設相較于空間自相關法更為靈活,其可以布設為任意形狀,如十字型、內嵌等邊三角型(多重圓型)、L型、直線型等。
空間自相關法是保持圓周半徑不變,改變頻率,得到自相關系數隨頻率的變化關系;而擴展空間自相關法是保持頻率不變,改變圓周半徑,計算自相關系數并與貝塞爾函數擬合,求得自相關系數隨距離的變化關系[12-13]。不同半徑下頻率為f的空間自相關系數S定義為

(5)
(6)
式中,r0n為所改變的半徑;r0對應第1類零階貝塞爾函數J0;n為所改變的半徑數;E為擬合誤差。
1.3 頻率-波數法(F-K法)
F-K法的臺陣布設相對也比較靈活,但是該方法需要布設較多的臺站,需要在勘探區域均勻布設7個以上檢波器,且檢波器之間的距離應盡量不等[14]。F-K法是根據最大似然法理論從天然源記錄中求取瑞雷波的頻率-波數功率譜,并用不同中心頻率的窄帶濾波器提取各個頻率成分的面波相速度。該方法是將微動信號從時間-空間域轉換到頻率-波數域進行分析,利用波數矢量的方向性,從F-K譜圖中推算出入射波的方向和瑞雷波相速度的大小。
波數矢量的函數表達式為
(7)
式中,k為波數矢量,rad/m;f為頻率,rad/s;v為相速度,m/s。
通過頻率-波數功率譜的方位角確定某個頻率成分面波的傳播方向為
(8)
求出不同頻率f對應的相速度,即可獲得一條相速度頻散曲線。
2 微動探測對比試驗
2.1 臺陣對比試驗
試驗位置在陜西省眉縣縣城范圍內。試驗采用DTCC公司的SmartSolo IGU-16HR無線節點采集儀器。該儀器設備具有高質量、高靈敏度、高可靠性、低失真等特點,滿足此次微動勘探的需求。臺陣試驗分別采用直線型、L型、十字型、口字型、三重圓型方式布設,采樣間隔1 ms,記錄長度3 600 s。
對不同觀測臺陣的微動信號進行頻散譜提取,如圖1所示。由圖1可知,直線型排列在北東及北西方向頻散曲線差別較大,并且頻散譜能量相對分散,是由于其只能接收到來自一個方向的微動信號,因此并不能完全反應地下的真實情況,如果確定微動信號來源方向,可以垂直振動信號方向布設直線型排列。L型臺陣的頻散譜能量相對分散,十字型、口字型以及三重圓型臺陣頻散譜能量集中度都高。其中以三重圓型臺陣頻散譜能量集中度最高,且其在低頻段的頻散譜能量相對于十字型和口字型更為集中。

圖1 不同臺陣頻散譜Fig.1 Dispersion spectrum of different arrays
對比結果表明,在地形條件允許的情況下,采用三重圓型臺陣布設效果最好。
2.2 多重圓測深對比試驗
為了測試多重圓臺陣的探測深度,分別使用不同半徑的三重圓與四重圓的布設方式,來試驗其探測深度。三重圓半徑分別為5 m、10 m及20 m,四重圓半徑分別為25 m、50 m、100 m、200 m。采樣間隔1 ms,記錄長度3 600 s。采集數據如圖2所示。

圖2 不同臺陣微動數據Fig.2 Micro-motion data of different arrays
根據頻散譜提取出頻散曲線,然后進行反演,反演結果如圖3所示。

圖3 不同臺陣微動反演結果Fig.3 Micro-motion inversion results of different arrays
根據反演結果看到,三重圓型布設最大半徑為20 m,其反演結果深度在85 m左右,其探測深度為其最大半徑的4.25倍。四重圓型布設最大半徑為200 m,其反演結果深度在570 m左右,其探測深度為其最大半徑的2.85倍。經過試驗及參閱相關文獻數據,證實多重圓探測深度一般為其最大半徑的3~5倍。
3 微動探測方法在隧道探查中的應用
在一火車隧道上方進行微動探測工作。根據已知資料,該隧道呈南北走向,微動探測測線設計與隧道走向垂直,為東西方向布設,如圖4所示。
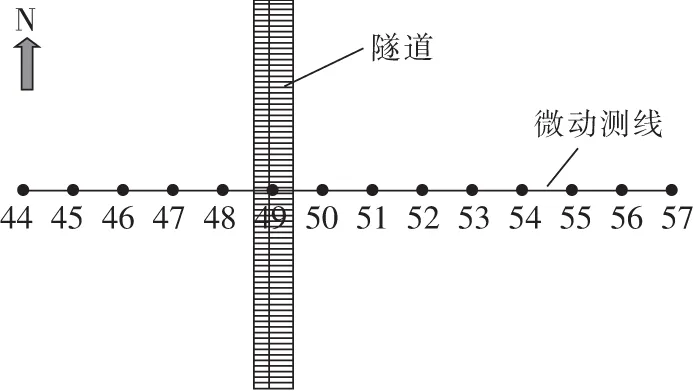
圖4 微動測線布設與隧道走向示意Fig.4 Micro-motion survey line layout and tunnel orientation
微動數據采集儀器繼續使用DTCC公司的SmartSolo IGU-16HR無線節點采集儀器。微動勘探觀測系統采用多個連續的三重圓型排列進行觀測,數據采集三重圓半徑分別為4 m、8 m、16 m。采樣間隔1 ms,連續記錄3 600 s。采集期間對周圍進行警戒,保證采集期間無人為干擾,微動數據采集記錄如圖5所示。在對微動數據進行處理時,首先使用ESPAC法提取頻散曲線,將提取到的頻散曲線進行反演,得到單點的速度-深度模型,然后將速度-深度模型組成一條測線,生成視S波速度剖面,如圖6所示。

圖5 三重圓二維排列微動數據Fig.5 Triple circle two-dimensional arrangement of micro-motion data

圖6 微動探測S波速度剖面Fig.6 S-wave velocity profile of microtremor survey
根據處理得到的S波速度剖面可以看到,在勘探區域中部,地面樁號49位置,深度距地面23 m處,有一明顯低速異常區域,由于隧道的存在,在S波速度剖面上也應表現為低速異常,根據這一特征將該低速異常區域解釋為隧道位置。經過與實際隧道位置相比對,其在橫向及縱向上均與隧道位置相吻合。
4 結論
通過對不同觀測臺陣的探測效果進行對比分析,在場地允許的情況下,使用三重圓臺陣布設方式效果最好。通過多重圓臺陣測深試驗,確定多重圓探測深度為其最大臺陣半徑的3~5倍。通過微動探測方法在隧道探測中的應用效果,驗證了該方法的有效性與穩定性。
猜你喜歡
中學生數理化·七年級數學人教版(2022年6期)2022-06-05 06:50:50
快樂學習報·教育周刊(2022年16期)2022-05-01 21:25:05
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
新聞傳播(2016年10期)2016-09-26 12:14:59
新聞傳播(2015年10期)2015-07-18 11:05:40
交通建設與管理(2015年15期)2015-03-20 15:18:57
