可見/近紅外實時成像光譜儀控制系統設計
2022-03-29 13:04:46吳長坤郝亞喆
中國光學 2022年2期
關鍵詞:信號
吳長坤,張 為,郝亞喆
(天津大學 微電子學院, 天津 300072)
1 引 言
隨著光譜成像技術的不斷革新,成像光譜儀開始向多波段、寬光譜覆蓋范圍以及高分辨率方向發展。2010年,中國科學院西安光學精密機械研究所常凌穎等人設計的AOTF成像光譜儀,光譜范圍為1 000 nm~1 700 nm,帶寬為700 nm[1];2012年,北京航空航天大學精密光機電一體化技術實驗室趙慧潔等人,面向火星探測研制了一種基于AOTF的成像光譜儀原理樣機,光譜范圍為550 nm~1 000 nm,帶寬為450 nm,圖像傳輸速率為12.5 MB/s[2];2013年,趙慧潔等人又設計了基于數字信號處理器控制的實時成像光譜儀,圖像傳輸速率為10 MB/s[3];2017年,中國科學院長春光學精密機械與物理研究所(簡稱長春光機所)曹佃生等人,設計了一種適于機載的寬視場、大相對孔徑的改進型Dyson光譜成像系統,系統工作光譜范圍為320 nm~1 050 nm,帶寬為730 nm[4];2019年,長春光機所張佳倫等人,設計了一種Offner型自由曲面棱鏡光譜儀,光譜范圍為380 nm~780 nm,帶寬為400 nm[5];2020年,長春光機所樊星皓等人利用線性漸變濾光片分光技術設計了一種高光譜成像光譜儀,光譜范圍為403 nm~988 nm,帶寬為585 nm[6];2017年,中國科學院蘇州生物醫學工程技術研究所設計了一套棱鏡-光柵-棱鏡型可見近紅外成像光譜儀,光譜范圍為400 nm~1 000 nm,帶寬為600 nm[7];2020年,中國科學院上海應用物理研究所空間主動光電技術重點實驗室劉世界等人,使用棱鏡-透射光柵-棱鏡分光器件設計了一套光譜成像系統,光譜范圍為400 nm~1 000 nm,帶寬為600 nm[8]。現有成像光譜儀光譜帶寬普遍較窄,光譜儀的譜段范圍決定了待測目標在不同環境下的成像質量,進而影響后續目標分析系統的檢測能力,因此拓寬光譜帶寬,提高光譜儀采集速率,對于高質量目標檢測與分析有著重大意義。
2 實時成像光譜儀
光學系統中的分光器件是決定系統成像質量的關鍵模塊,光譜儀中常見的分光器件有棱鏡、光柵以及聲光可調諧濾波器等,相較于棱鏡和光柵,聲光可調諧濾波器作為一種新型分光器件,具有體積小重量輕、掃描速度快、無移動部件、抗震性好等特點,同時其支持的光譜范圍更廣、入射孔徑以及視場角更大,能夠快速響應不同波長的選擇,在多光譜成像應用中有著較大的優勢[9]。AOTF通常由二氧化碲制作,可以實現從可見光到中紅外的工作波長范圍,文獻[1-3]、[10-12]均采用AOTF分光器件實現了成像光譜儀的設計。
2.1 AOTF簡介
AOTF是一種利用聲光衍射原理工作的分光器件,由聲光晶體、超聲換能器以及吸聲裝置組成,結構示意圖如圖1所示。超聲換能器將射頻驅動器發出的信號轉換為超聲信號傳送到聲光晶體中,超聲波引起晶體折射率發生周期性的變化形成超聲光柵,當入射光照射到光柵后產生布拉格衍射,衍射光波長與射頻驅動信號的頻率相對應。如果入射光有較為復雜的光譜成分,即包含多種波長形式的光,通過改變射頻驅動信號的頻率即可改變衍射光的波長,從而達到分光目的;吸聲裝置用來吸收透過介質的聲波,避免發生反射[13]。
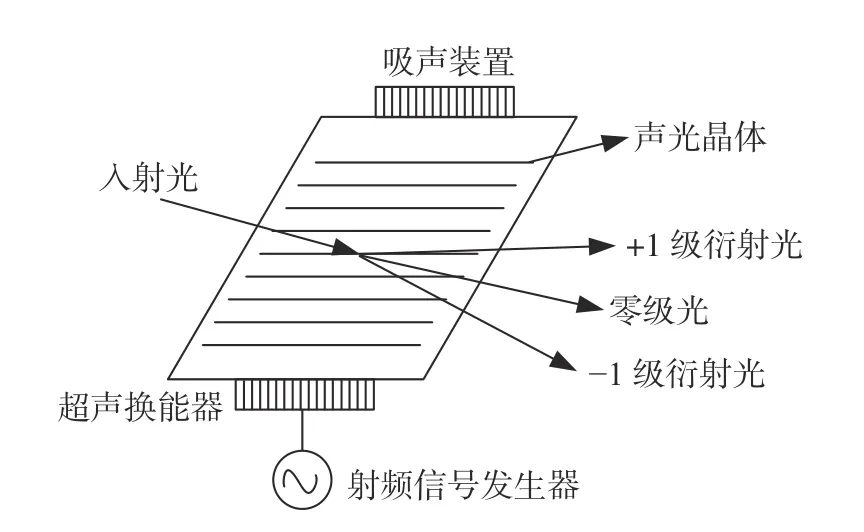
圖1 AOTF原理圖Fig.1 Schematic diagram of the AOTF
2.2 光譜儀整體架構設計
在光譜儀設計中,如果把多個工作在不同波段范圍的電荷耦合元件(Charge-Coupled Device,CCD)集成到同一臺光譜儀,不僅可以得到更寬的光譜以及更多的波段信息,還能使獲取的目標信息變得更加精細[14-15]。可見光傳感器通常可以捕捉到人肉眼能夠看到的場景,紅外傳感器可以捕捉到弱光條件下的場景,因此將可見光傳感器與紅外傳感器相結合,對不同環境下軍事領域的目標觀測,有著極其重要的應用價值[16-19]。圖2即為可見光/近紅外光譜儀系統結構示意圖。
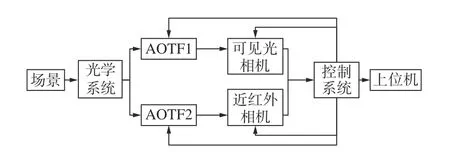
圖2 成像光譜儀結構示意圖Fig.2 Schematic diagram of the imaging spectrometer structure
可見光/近紅外光譜儀由光學系統、可見光相機、近紅外相機、AOTF以及成像采集控制系統組成,其中可見光相機采用CMOS(Complementary Metal Oxide Semiconductor)探測器芯片,工作波段為400~900 nm,圖像分辨率為1 024×1 024,最大幀頻為50 frame/s;近紅外相機采用InGaAs焦平面探測器,工作波段范圍為900~1 700 nm,圖像分辨率為640×512,最大幀頻為50 frame/s。光譜儀整體工作波段范圍為400~1 700 nm,帶寬為1.3 μm。系統工作時默認采集400 nm波長圖像,上位機可以通過波長設置指令控制AOTF的工作,進而觀察到任意有效波長下的圖像。
2.3 光譜儀控制系統設計
光譜儀控制系統在Xilinx XC7K325T系列FPGA芯片上實現,控制系統結構如圖3(a)所示。控制系統主要包括兩路Cameralink接口、兩路相機外觸發信號(SYN)、兩路AOTF復位信號(AOTF_OUT)、兩路AOTF使能信號(AOTF_IN)、五路RS422串口(serial port)以及一路USB3.0接口。圖3(b)為控制系統的PCB板圖,主控芯片為Xilinx XC7K325T型號FPGA。
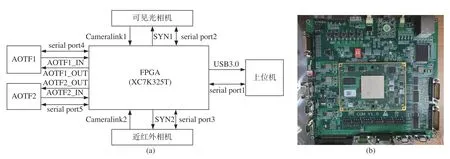
圖3 (a)控制系統示意圖及(b)控制系統PCB板圖Fig.3 Schematic diagram (a) and PCB drawing (b) of control system
Cameralink是一種專門用于圖像數字傳輸的協議,數據傳輸模式主要分為Base模式、Medium模式以及Full模式,可見光相機以及近紅外相機均采用Base模式傳輸圖像數據;協議中同時定義了4位數據使能控制信號,分別為幀同步信號(FVAL)、行同步信號(LVAL)、數據有效信號(DVAL)以及空閑備用信號,信號均為高有效[20]。在進行圖像采集時,通過判斷FVAL、LVAL、DVAL 3個信號是否有效,即可采集到實時的圖像數據。相機工作分為內觸發模式和外觸發模式,內觸發模式下按照固定幀頻采集圖像;外觸發模式下可以通過發送外觸發信號(SYN)來控制相機幀頻;相機串口用于上位機對相機增益、曝光時間及其它參數的手動配置,可以隨時調整相機的工作方式。圖像數據采用USB3.0接口傳輸到上位機進行實時顯示,USB3.0接口設計簡單、應用廣泛且具有最高5 Gbps的傳輸速度,因此非常適用于高速數據的傳輸。
AOTF選用中電集團LSG系列產品,由于可見光相機和紅外相機工作波長范圍不同,因此相機使用的AOTF也不同。AOTF1工作波長為400~1 000 nm,光譜分辨率為2~10 nm,衍射效率大于60%;AOTF2工作波長為900~1 700 nm,光譜分辨率為2~13 nm,衍射效率大于60%。
兩個AOTF控制方式相同,都包含兩個控制信號和一個串口配置信號。串口配置信號用來配置AOTF的工作頻率以及幅度,使用RS422協議進行通信,工作頻率與工作波長一一對應,通過射頻信號頻率計算公式即可得出。AOTF有單頻和掃頻兩種工作模式,單頻模式下AOTF按單一頻率工作;掃頻模式下AOTF可以按照初始頻率以及設定步長,多頻率循環工作。頻率設置完成后AOTF_IN信號拉高,表明頻率設置完成,需要注意的是在AOTF_IN信號拉高時,用戶無法繼續對AOTF的頻率進行配置;當用戶向AOTF發送一個高電平持續時間至少為2 ms的AOTF_OUT信號時, AOTF_IN信號會被拉低,此時可繼續對AOTF做頻率配置。
按照控制系統中各設備及接口的工作特點,設定了光譜儀控制系統的工作流程:設備通電后,上位機通過串口向控制系統發送波長信息以及相機幀頻信息,之后控制系統根據波長數值啟動其對應的AOTF工作,然后將波長信息轉換成頻率信息發送給AOTF,AOTF頻率設置完成后拉高AOTF_IN信號,AOTF_IN信號拉高以后控制系統向相機外觸發信號發送對應幀頻的波形信號,此時相機開始采集圖像,接收到的圖像信息通過USB3.0接口實時傳輸到上位機顯示,一幅圖像采集完成后相機停止工作,控制系統向AOTF發送一個高電平為2 ms的AOTF_OUT信號,等待AOTF_IN信號拉低,信號拉低后繼續相應操作進行圖像采集與實時顯示。
上文提到AOTF有單頻和掃頻兩種工作模式,掃頻模式下AOTF_IN信號拉低以后,控制系統按照上位機設定的初始波長和步長計算出對應頻率,自動重復上述工作流程即可完成固定波長下的圖像采集。若上位機發送單頻指令,當指令中只有一種波長,AOTF_IN信號拉低以后,自動重復上述工作流程即可完成單一波長下的圖像采集;當指令中有多種波長信息,首先需要將波長信息緩存到FPGA的片內RAM之中,RAM深度可根據波長數量調整,每拉低一次AOTF_IN信號按順序循環讀取一次RAM,將讀出的波長信息轉換成對應的頻率信息,自動重復上述工作流程即可完成任意多波長下的圖像采集。為方便圖像分析與顯示,控制系統還對每幅圖像做了信息標記,信息包括相機類型、圖像波長、圖像幀號以及圖像幀頻,至此整個控制系統設計完成。
3 系統測試
為驗證光譜儀成像系統的可行性,對光譜儀進行了外場測試。圖4為光譜儀地面測試工作圖,測試目標為地面建筑物,方框部分即為光譜儀實物圖。

圖4 光譜儀測試現場Fig.4 Test-site of the spectrometer
測試時采用3種固定波長循環成像,波長數值可以在400~1 700 nm范圍內任意設置,圖5為可見光相機在不同波長下采集到的目標圖像,工作波長分別為450、550以及750 nm;圖6為近紅外相機在不同波長下采集到的目標圖像,工作波長分別為900、1 000以及1 400 nm;相機幀頻均為50 frame/s。從圖中可以看出,不同物體對不同波長有著不同的反射率,因此在不同波長下,上位機采集到的圖像亮度及其包含的有效信息不同;同時由于AOTF在不同波長工作時衍射效率的差異,導致目標圖像在清晰度上也有所區別。
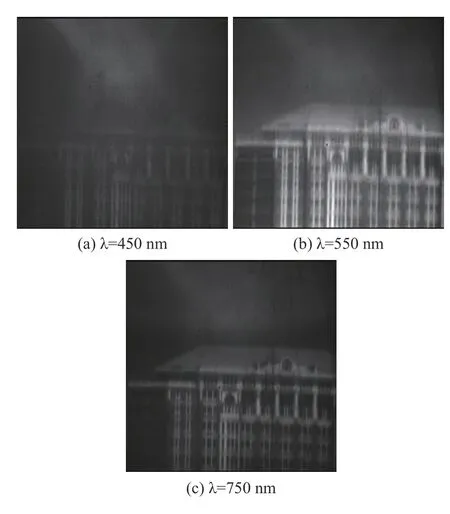
圖5 可見光相機在不同波段的測試結果Fig.5 Experimental results of the visible light camera at different wavebands
4 結 論
高光譜成像應用中,針對現有成像光譜儀光譜范圍窄、采集圖像速率慢的問題,本文設計了一款基于AOTF的可見/近紅外實時成像光譜儀。光譜儀采用Xilinx XC7K325T型號 FPGA作為主控芯片,最終實現了光譜帶寬為1.3 μm的實時成像,光譜分辨率為2~13 nm。使用USB3.0接口將數據傳輸到上位機做實時顯示,針對1 024×1 024分辨率圖像,最高速率達120 frame/s。該光譜儀支持多種分辨率相機以及多種波長范圍的AOTF設備,有著很強的可擴展性,因此具備非常重要的實用價值。
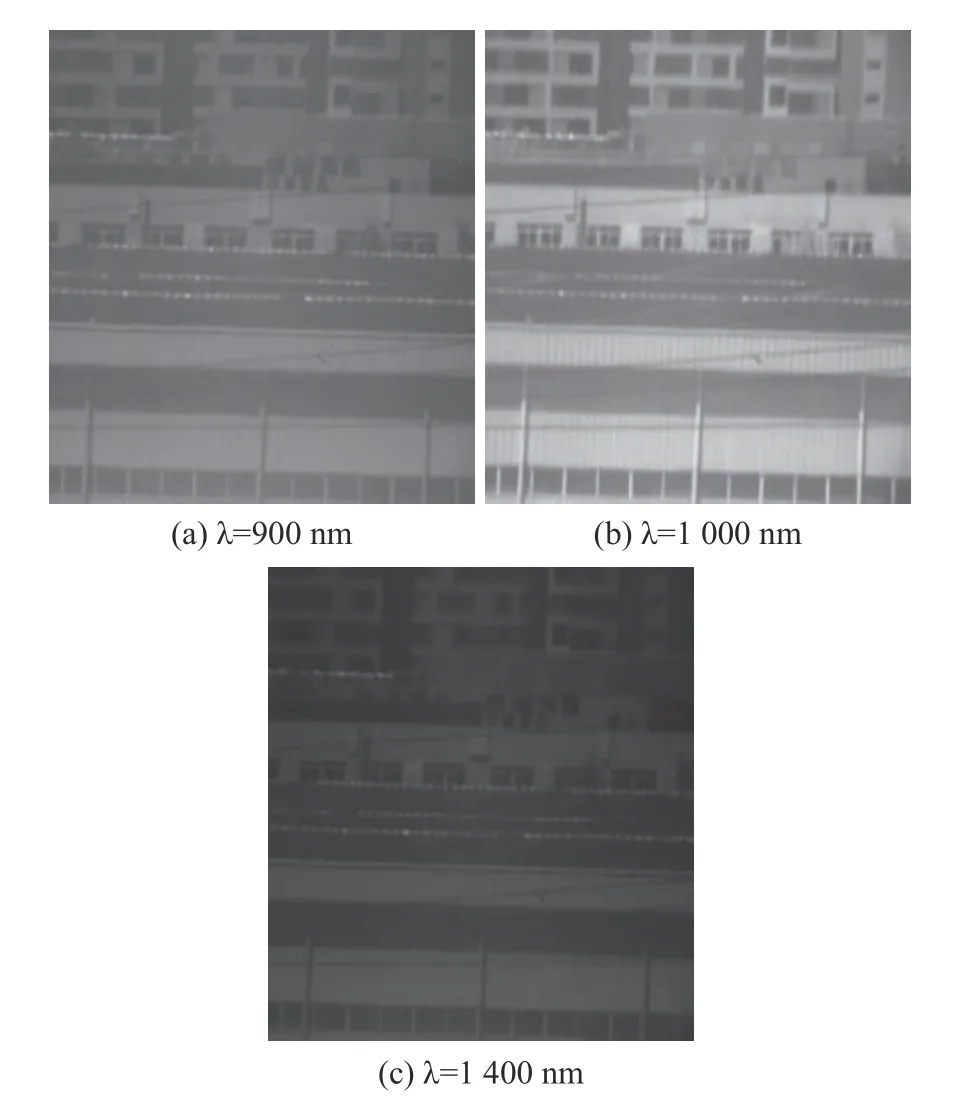
圖6 近紅外相機在不同波段的測試結果Fig.6 Experimental results of the near-infrared camera at different wavebands
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06