惡劣天氣下的仿生偏振定向方法
2022-03-30 08:23:38吳新冬趙東花劉永鑫
導航定位與授時 2022年2期
吳新冬,趙東花,俞 華,晉 濤,劉永鑫,申 沖
(1. 中北大學儀器科學與動態測試教育部重點實驗室,太原 030051;2.國網山西省電力公司電力科學研究院,太原 030001;3.中北大學儀器與電子學院,太原 030051)
0 引言
自然界中,果蠅、沙蟻、蜣螂等動物的導航能力是令人驚訝的。他們利用天空中的線偏振信息以及太陽位置信息,便可以精確地到達目的地。為了模仿動物們利用天空的偏振信息進行導航定向,近些年,國內外的許多學者對此進行了研究。2019年,國防科技大學提出了一種基于加權平均的仿生偏振光定向算法,車載實驗證明精度優于0.5°,可應用于地面無人平臺。2019年1月,艾克斯-馬賽大學的J. Dupeyroux等根據沙蟻復眼設計了一種2像素的偏振視覺傳感器,并集成到了六足機器人上,在晴朗天空靜態條件下定向精度可達0.248°。2020年,北京理工大學提出了一種新的導航方向獲取算法,可在小視場條件下通過對太陽方向矢量的擬合判斷導航方向。通過在晴朗天空下的轉臺實驗驗證,定向精度可達0.3°,具有一定的應用前景。2021年,大連理工大學提出了一種基于模式的區域提取算法,在靜態晴空的條件下定向精度可達0.2172°。
綜合以上分析,基于大氣偏振模式的導航定向已經在晴朗天空條件下獲得了較高的精度。目前研究表明,動物在惡劣天氣條件下仍然可以通過大氣偏振模式進行導航定向。然而模仿動物在陰天、沙塵、霧霾等惡劣天氣條件下的導航定向問題仍然處于探索階段,主要集中在篩選出更加準確的偏振角度信息上。2017年,一種通過搜索偏振角度圖像對稱軸的方法實現了在霧霾天氣條件下確定出大致的航向角。2020年,范穎等提出了一種用于多云天氣條件下的大氣偏振光定向方法,在少云情況下定向精度小于0.5°、多云情況下小于1°。同年,為解決部分遮擋天空的定向問題,一種偏振成像傳感器的魯棒梯度振幅和二元積分方位角方法被提出。然而,盡管上述文獻中所述方法能夠在一定程度上提高定向精度,但定向精度仍然顯著受到天氣影響。這主要是由于這些方法均基于被破壞的偏振角度圖像進行擬合定向,而未考慮偏振角度圖像本身的誤差。所以尋找一種在惡劣天氣條件下能夠有效恢復偏振角度圖像并實現準確定向的算法變得十分緊迫。
為了解決上述問題,本文提出了一種可用于惡劣天氣條件下的大氣偏振模式定向算法,通過塊匹配的思想融合canny邊緣檢測算法,修補在惡劣天氣條件下被破壞的大氣偏振角度圖像,通過對修補后的偏振角度圖像進行直線擬合,實現了惡劣天氣下更高精度的大氣偏振模式定向。
1 原理與方法
大氣偏振模式的最佳觀測條件為高海拔干燥的晴朗天空,在非晴空的天氣條件下偏振模式會遭到不同程度的破壞。而非晴空條件在現實中是廣泛存在的,因此對大氣偏振模式的智能處理就顯得尤為重要。針對不同惡劣天氣下的大氣偏振模式受到不同程度破壞的問題,對陰天、沙塵、霧霾天氣下的大氣偏振模式進行了測量,如表1 所示。結果表明,無論是哪種惡劣天氣,偏振強度均被顯著破壞,并且強度值集中在0%~5%。在陰天、沙塵條件下,偏振角圖像的對稱∞模式會基本保持,但存在嚴重的噪聲;在霧霾條件下,偏振角圖像的對稱∞模式會遭到破壞,但仍然關于太陽子午線存在明顯的反對稱模式。
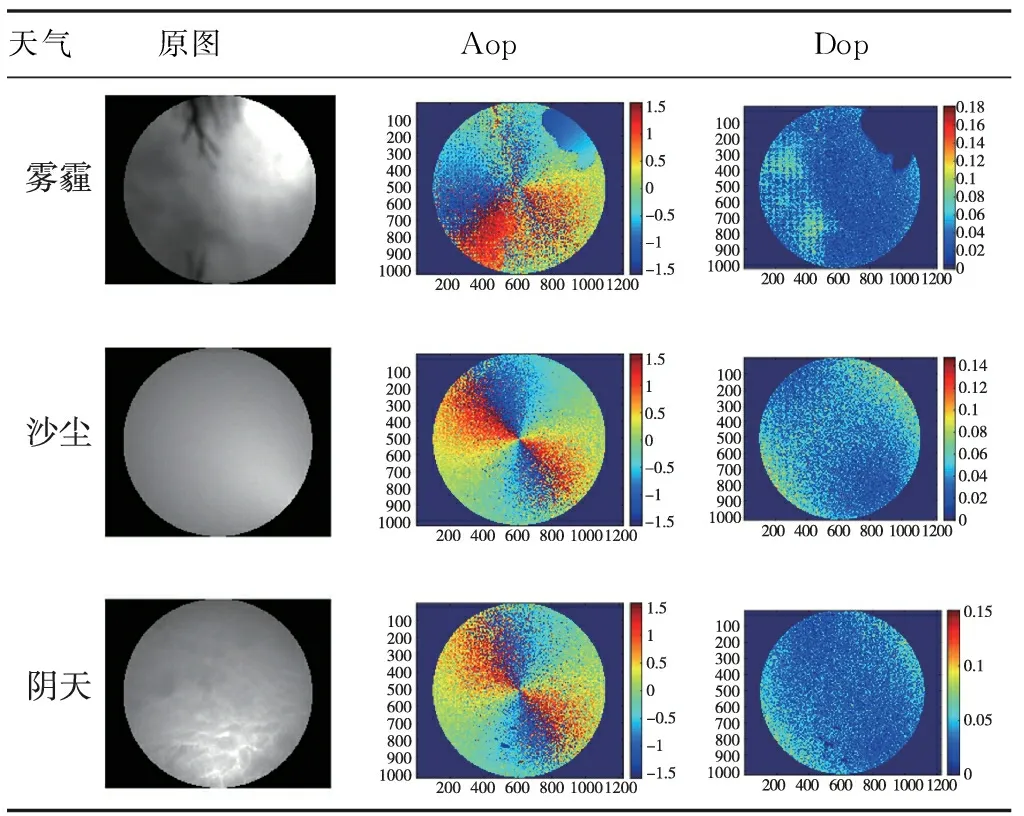
表1 不同天氣下偏振信息對比
所以,在惡劣天氣下基于大氣偏振信息進行航向角解算之前先對其進行圖像處理是有必要的。由于偏振角度被破壞的程度更低,故選擇對更容易修復的偏振角度圖像進行處理。將偏振角度圖像的修復分為噪聲粗處理和邊緣提取處理去噪兩部分。通過噪聲的粗處理將四通道偏振圖像中的大部分噪聲去除,并恢復被惡劣天氣破壞的偏振角度∞模式。然后通過對粗處理圖像無窮型信號的邊緣提取處理,對邊緣之間的圖像信息進行二次處理以進一步去噪。
1.1 噪聲粗處理
目前,BM3D以及其延伸算法VBM3D、BM4D、VBM4D等算法為圖像去噪領域峰值信噪比(Peak Signal-to-Noise Ratio, PSNR)結果較好的算法。此外,有研究表明BM3D算法對偏振圖像有著良好的去噪效果。而無論是BM3D還是其延伸算法均采用了塊處理的思想,所以在對噪聲粗處理的階段,沿襲塊處理的思想,對噪聲圖像進行粗處理得到去噪后圖像。
=()
(1)
式中,為噪聲圖像;為粗處理去噪函數。
首先,進行相似塊堆疊,選出×大小的參考塊,通過計算二范數2在其鄰域內尋找相似塊,最多個。

(2)
將相似塊堆疊為三維塊后,對每一個二維塊進行二維離散余弦變換(Discrete Cosine Transfo-rm, DCT)

(3)
式中,()=()。
(4)

(5)
同時,由于堆疊后的圖像塊具有3個維度,在對第3個維度進行Hadamard變換后,對小于硬閾值的數置零。
(6)
由于DCT和Hadamard變換的高度對稱性,進行三維反變換便可還原回時域,得到粗處理后的圖像。

(7)

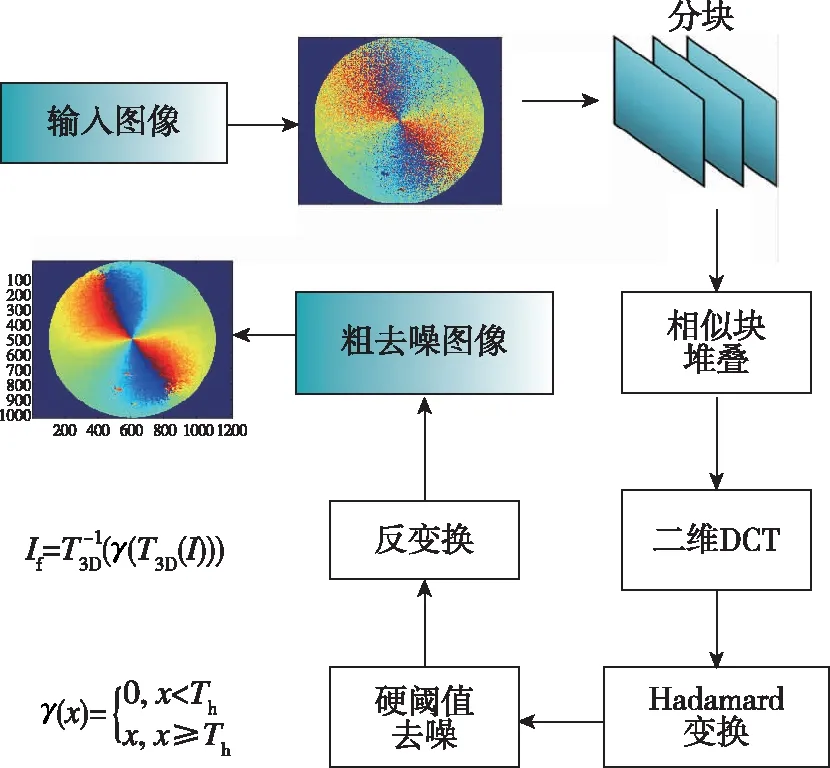
圖1 三維塊匹配算法流程圖Fig.1 Flow chart of 3D block matching algorithm
1.2 基于邊緣提取的噪聲二次處理
盡管粗處理能夠對被天氣破壞的偏振角度圖像進行一定程度的還原。然而,在實際應用中并非每次粗處理都能得到令人滿意的效果。所以有效判斷出處理后的結果是否如期望一致是必要的。針對大氣偏振模式角度圖呈現無窮型條狀分布的特點,對粗處理后的圖片進行二次處理。
首先,通過canny邊緣檢測算法提取出無窮型分布的邊緣圖像。
=()
(8)
其中,為邊緣檢測算法。基于大氣偏振模式,有效去噪的邊緣偏振角度二值圖像均呈現出無窮型的特點,所以圖像質心(,) 會更加接近天頂點。
(9)
其中,定義為
(10)
在此處、取值為0或1。 所以通過比較粗處理前后天頂點與圖像質心的歐氏距離,便可以判斷出是否為有效粗處理。

(11)
式中,、為天頂點在圖像坐標系中的坐標。當不為有效粗處理時,圖像返回粗處理部分并重新調節參數,直至歐氏距離差值大于閾值。
=|-|
(12)
其中,為粗處理后的邊緣偏振角度二值圖像質心至天頂點的歐氏距離;為原始圖像的邊緣偏振角度二值圖像質心至天頂點的歐氏距離。
特別地,通過對二值圖像邊緣點的統計判別是否提取出圖像邊緣。認為當點數小于閾值1時,則未提取出邊緣。若去噪前邊緣點數小于1,而去噪后邊緣點數大于1時,不再進行歐式距離判斷,直接認為去噪是有效的。所以,通過閾值1可以免去當偏振角度圖像∞模式被部分破壞時的判斷,提高判斷算法的準確率。
同時,設定閾值2,若去噪前邊緣點數減去去噪后邊緣點數大于2,則認為在此天氣條件下不需要對偏振角度圖像進行去噪處理,直接進行太陽子午線擬合即可得到準確的角度值。
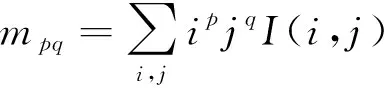
圖2展示了當一組粗處理前后的偏振角度圖像輸入后,算法的判斷流程。
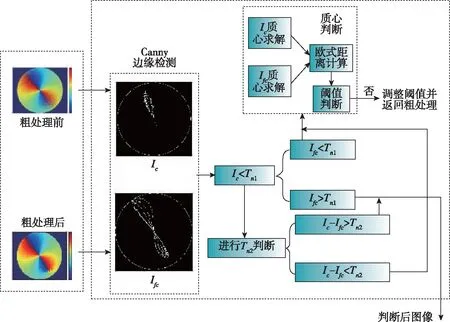
圖2 判斷算法流程圖Fig.2 Flow chart of judgment algorithm
此外,為了對處理結果進行優化,當為有效粗處理時開始進一步去噪處理。由于偏振角度圖像的無窮型條狀分布的特點,通過對canny邊緣圖像進行再一次利用,將邊緣內部的每一塊小圖像截取為方形長條,依據長度劃分為小塊并進行三維堆疊。此處由于偏振角度圖像的特征,認為每一塊條狀內部分布均是相似的,所以在此處跳過相似塊尋找部分,直接進行三維變換并去噪,得到最終處理后的圖像,如圖3所示。
圖3中,A1為陰天條件下對粗處理后的偏振角度圖進行邊緣提取,B1為陰天提取邊緣后的算法的最終輸出圖,A2為霧霾條件下對粗處理后的偏振角度圖進行邊緣提取,B2為霧霾提取邊緣后的算法的最終輸出圖。實驗證明,通過粗處理能有效提取出二次處理的邊緣圖像。算法總體流程如圖4所示。

圖3 噪聲二次處理圖Fig.3 Noise secondary processing image
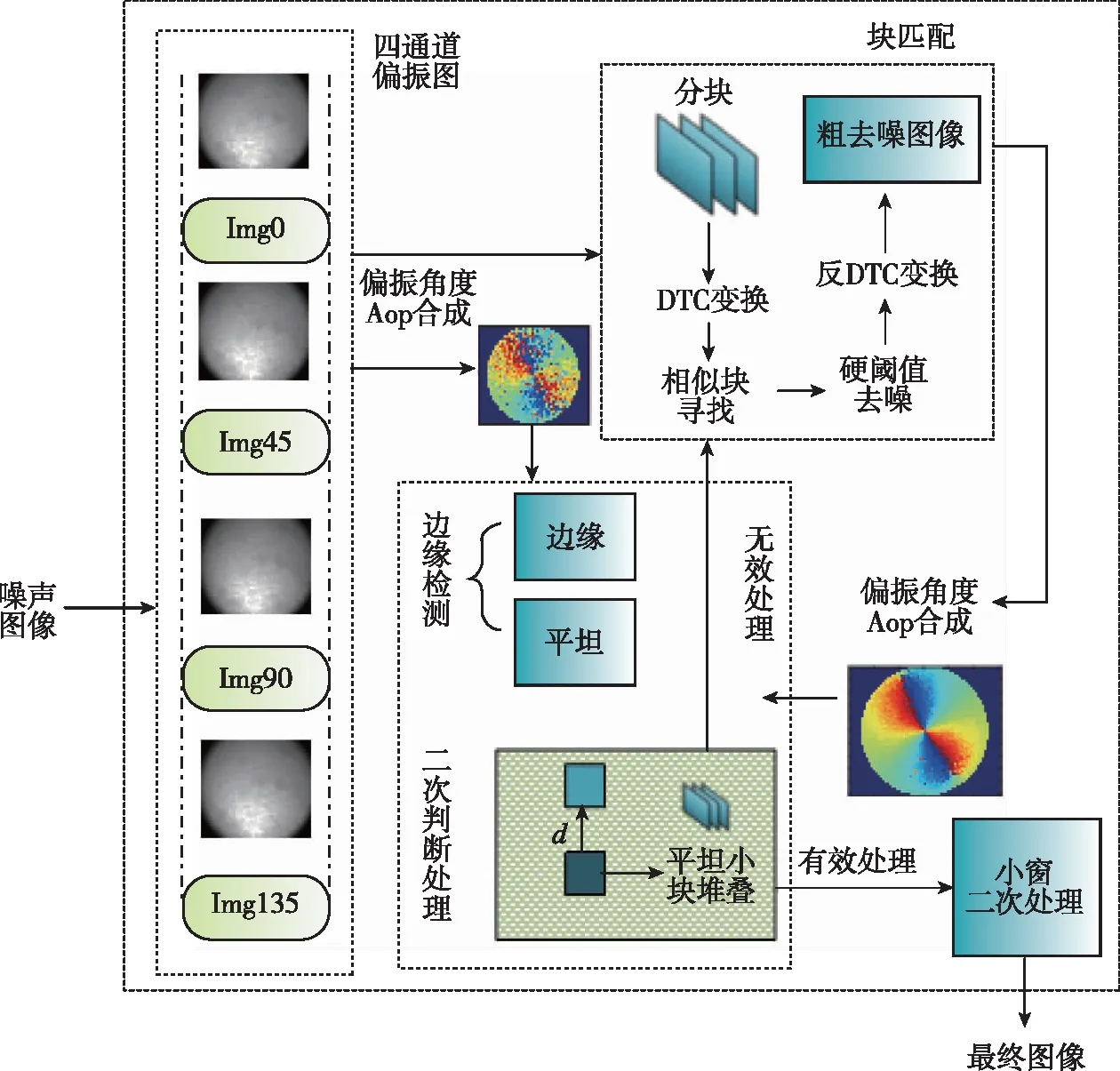
圖4 算法流程總體圖Fig.4 General diagram of algorithm flow
1.3 基于修補偏振模式后的航向角解算算法
基于瑞利散射理論,可以通過太陽子午線附近的偏振角度值擬合出載體坐標系下的太陽子午線。
所以,可以很容易得到載體坐標系下的太陽方位角
=arctan()
(13)
式中,為載體坐標系中的太陽子午線斜率。
在導航坐標系下,太陽方位角被定義為由反太陽位置指向太陽位置的方向與正北方向的夾角。當已知觀測時間與觀測點的經緯度時,可以通過天文知識求解得出

(14)
其中,為太陽高度角;為太陽方位角;為觀測點緯度;為太陽赤緯角;為太陽時角。
通過導航坐標系與載體坐標系下的太陽方位角(圖5),可以計算得到載體的航向角為
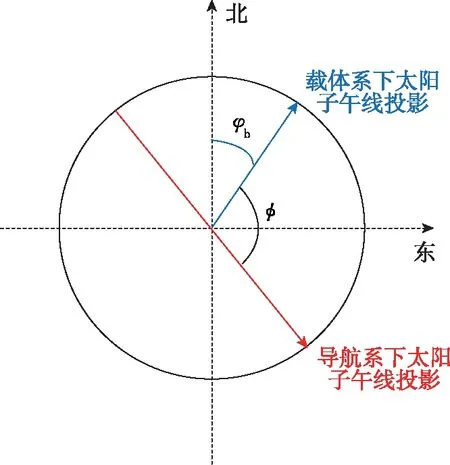
圖5 定向示意圖Fig.5 Schematic diagram of direction
=-
(15)
即在已知導航系下的太陽方位角后,載體的航向角誤差主要由載體坐標系下太陽方位角產生。所以,通過對惡劣天氣下的大氣偏振模式進行修補,可以擬合出更加準確的載體坐標系下太陽子午線,能夠有效減小惡劣天氣下的航向角解算誤差。
此外,由于不同天氣條件下的偏振角度圖像被破壞的程度是不同的,在晴朗少云等天氣下大氣偏振模式幾乎不被破壞,可以直接提取邊緣信息并進行處理,所以進行噪聲粗處理部分是沒有必要的;而在霧霾、陰天、沙塵等天氣下,大氣偏振模式中含有大量的噪聲,導致無法直接提取出邊緣信息,所以進行噪聲粗處理就成為必須執行的一步。
所以依據天氣情況進行參數的調整是有必要的。因為偏振強度隨天氣變化而發生劇烈變化,在惡劣天氣下偏振強度較低,而在天氣良好時會保持較高的強度值,故而偏振強度可以較好地區分出天氣情況。
因此,依據偏振強度值將偏振圖像劃分為晴朗與惡劣天氣兩大部分后進行自適應偏振模式的修補。通過設置硬閾值進行天氣的判斷,當>20時,天氣良好不進行粗去噪處理;當<20時,大氣偏振模式受到破壞,需進行粗處理去噪。航向解算流程如圖6所示。
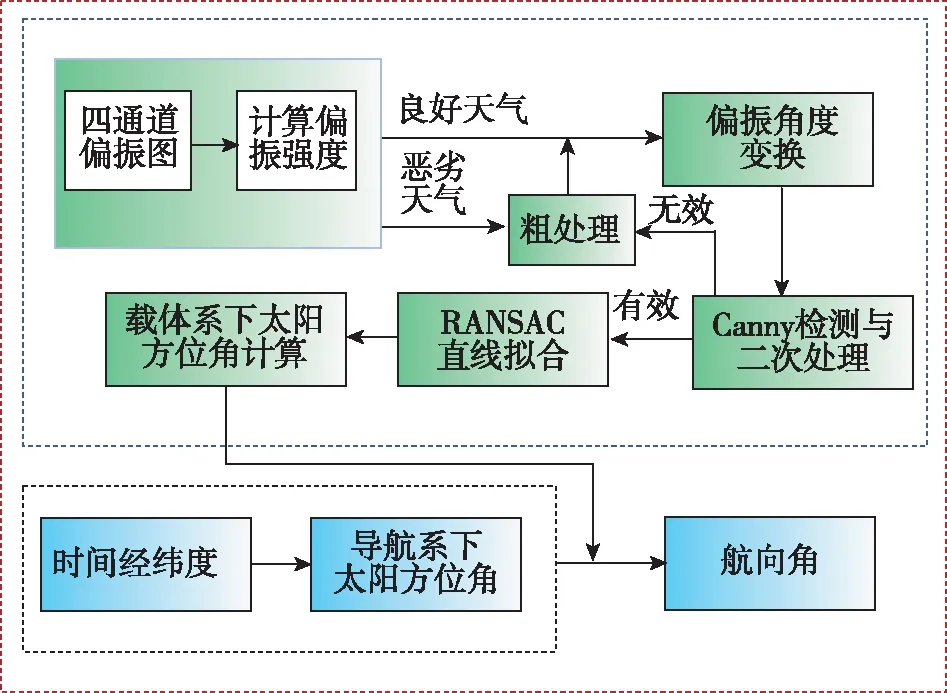
圖6 航向角解算流程圖Fig.6 Flow chart of heading angle calculation
2 實驗
對所提算法進行了室外實驗驗證,于2021年3月在中北大學對大氣偏振模式進行了測量,樣機與參數如圖7所示。測量設備為自行研制的仿生偏振定向樣機,其中偏振傳感器為基于Sony-IMX250MZRCOMS的四通道偏振相機,處理單元采用NVIDIA-TX2。
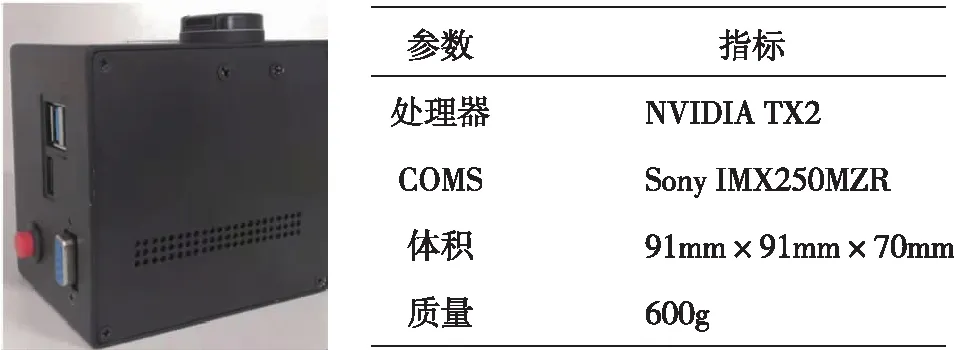
圖7 樣機與參數Fig.7 Prototype and its parameters
本文選擇了陰天、霧霾、沙塵三種惡劣天氣情況進行太陽子午線擬合,此外以晴朗天空條件下的偏振角度圖擬合太陽子午線作為對比。由樣機拍攝到的四種天氣下的大氣偏振圖像如圖8所示。

(a)晴天 (b)沙塵 (c)陰天 (d)霧霾圖8 不同天氣下的偏振圖像Fig.8 Polarized images under different weather conditions
為了驗證算法的有效性,對比采用本文算法與不采用本文算法直接擬合出的太陽方位角,如圖9所示。同時,結合導航系下太陽方位角進行航向角的計算。其中基準航向角的數值來源為北斗星通公司生產的小型高精度光纖/衛星組合導航系統,型號為IMU-KVH1750,航向精度可達0.035°(RMS)。
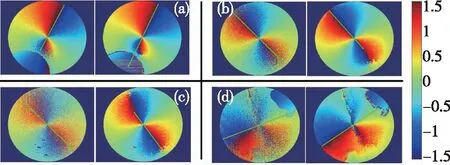
圖9 不同天氣去噪結果對比Fig.9 Comparison of denoising results in different weathers
擬合結果表明,在晴朗天空下偏振角度的無窮型模式被破壞程度較低,使用本文算法擬合后能夠更好地恢復出太陽子午線,達到更準確定向的目的;在陰天、沙塵天氣條件下,偏振角度圖像中噪聲明顯,直接擬合會帶來較大的誤差,但仍能得到大致方位;而在霧霾條件下,直接擬合時會出現較大偏移,甚至會出現12°的巨大誤差,所以直接擬合去解算載體坐標系下太陽方位角就變得十分的不可信。
此外,實驗結果表明,本文算法在各種天氣下均可提升載體坐標系下太陽方位角的解算精度;同時在惡劣天氣下,偏振光導航定向精度提升明顯。如圖10所示,在晴天條件下,精度從0.5657°提升為0.2411°;在陰天條件下,精度從4.0505°提升為0.7146°;在沙塵條件下,精度從3.0389°提升為0.9365°;在霧霾天氣下 ,精度從12.2555°提升為1.048°。
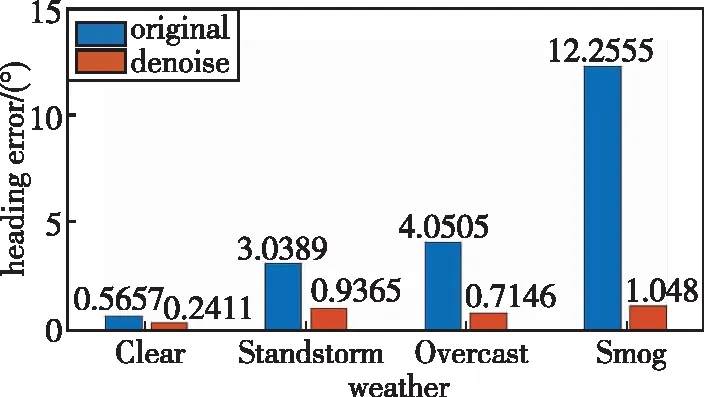
圖10 去噪前后誤差對比Fig.10 Error comparison before and after denoising
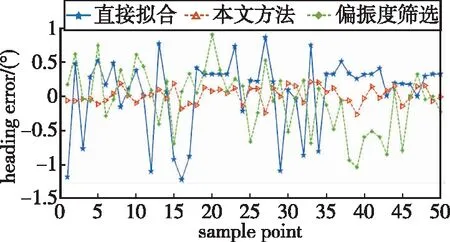
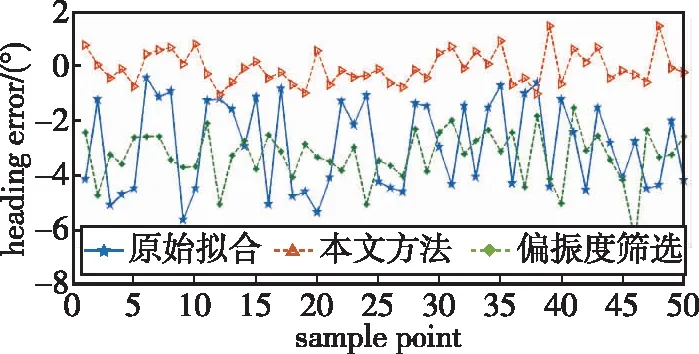
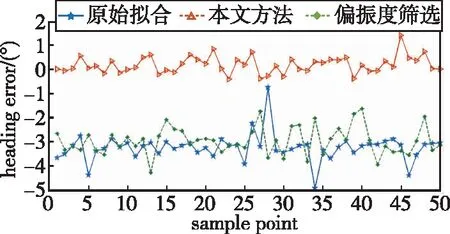
為了進一步驗證本文算法在惡劣天氣下的解算精度,分別對晴天、沙塵、陰天、霧霾條件下50組大氣偏振模式進行了驗證,其中對比算法分別為采用RANSAC算法直接擬合以及目前主流的利用偏振度篩選偏振角度的方法,結果如圖11所示。
(a) 晴天
(b) 陰天
(c) 沙塵
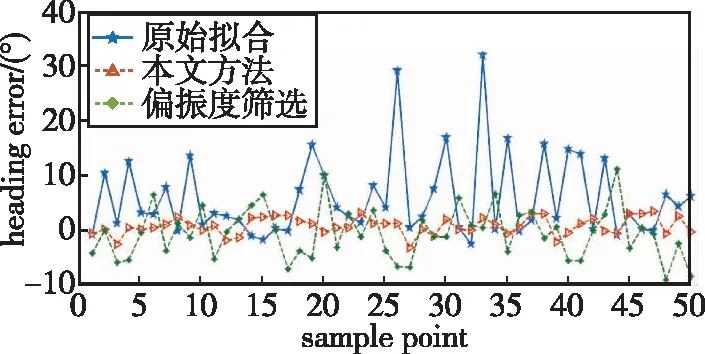
(d) 霧霾圖11 航向角誤差對比圖Fig.11 Heading angle error comparison chart
通過對比四種天氣條件下直接擬合與本文算法擬合的均方誤差、標準差、平均誤差、最大誤差,如表2所示。實驗結果表明,在晴天條件下本文算法RMS可達0.12°,在陰天條件下RMS可達0.6064°,在沙塵條件下RMS可達0.4058°,在霧霾條件下RMS可達1.6859°,對比直接擬合與偏振度篩選方法提升效果明顯。
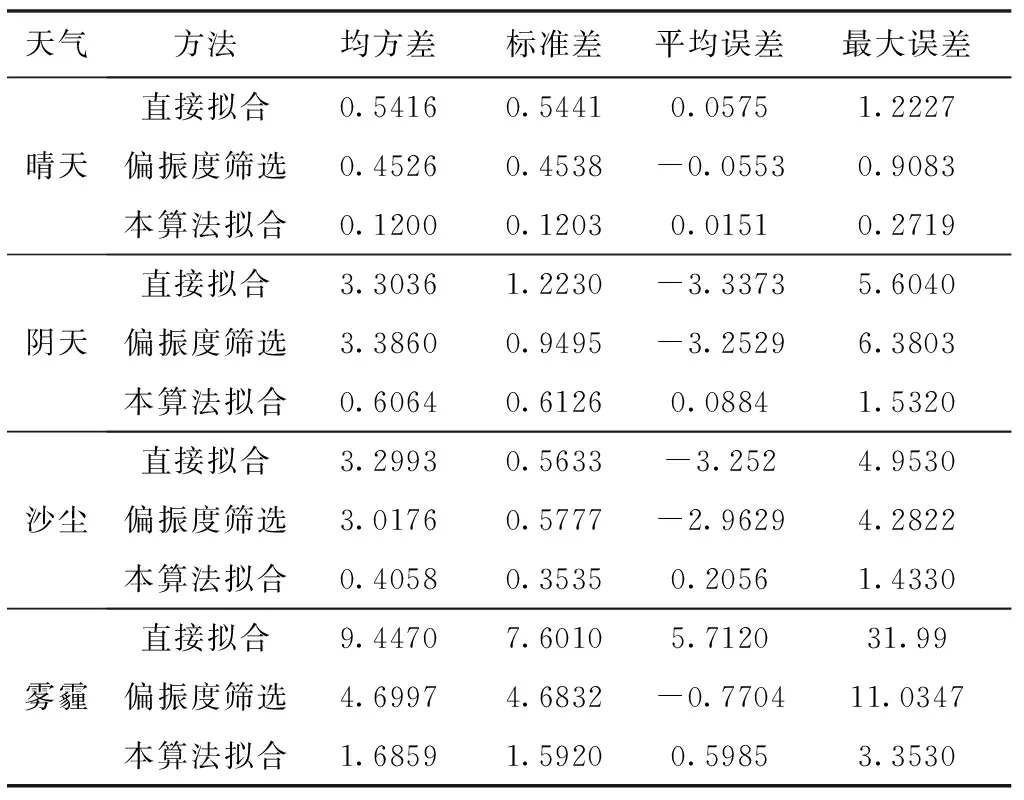
表2 去噪前后指標對比
3 結論
本文針對惡劣天氣下偏振定向精度下降的問題,利用仿生偏振定向樣機測量了晴天、陰天、沙塵、霧霾天氣條件下的大氣偏振模式,并進行了定向實驗,結果表明:
1)雖然天氣會破壞偏振強度模式,甚至在惡劣天氣下偏振角度∞模式會消失,但反對稱的模式具有高魯棒性。
2)基于偏振角度圖像關于太陽子午線反對稱的特點,本文提出了一種可以在不同天氣條件下自適應地進行偏振角度擬合的算法,相較于傳統的擬合算法不僅能顯著提高精度,而且能夠有效地補償被干擾的偏振角度模式。
3)本文算法能夠有效提高定向精度,減小定向誤差。在∞模式被破壞的霧霾天氣下,RMS可從9.4470°提升至1.6859°。
