高穩定高可靠多平臺兼容RTK精密定位系統設計與實現
2022-03-30 07:16:54石帥帥陳嘉宇程建華
導航定位與授時 2022年2期
齊 兵,石帥帥,陳嘉宇,程建華
(哈爾濱工程大學智能科學與工程學院,哈爾濱 150001)
0 引言
隨著中國北斗三號全球衛星導航系統的建成開通,由美國全球定位系統(Global Positioning System,GPS)、俄羅斯GLONASS、歐盟GALILEO和中國北斗衛星導航系統(BeiDou Navigation Satellite Sy-stem,BDS)構成的全球衛星導航系統(Global Navigation Satellite System,GNSS)框架日漸形成。同時,GNSS產業鏈伴隨著GNSS的不斷完善而迅速發展,國內外眾多機構迅速推出多類型GNSS模塊快速占領市場份額,并形成了選擇多、技術新、領域廣的大好局面。隨著精密定位需求的日漸增長,依賴于單一GNSS模塊的精密單點定位技術已無法進一步滿足精密定位需求,基于載波相位差分技術的實時動態(Real-Time Kinematic,RTK)定位系統較其他系統能提供更高精度的定位結果,因而得到了廣泛應用。
RTK系統具有作業效率高、定位精度高、全天候作業和自動化集成度高等優點,已廣泛應用于高精度位置服務,如地形測圖、城市規劃、精準農業等方面。然而,單一GNSS模塊由于受到信號遮擋、干擾等問題可能出現定位結果連續性變差、實時性降低,進而使得定位精準性無法滿足技術要求。同時,GNSS定位定向板卡快速更新換代使得RTK系統低兼容性問題日漸突出,導致其不能適應復雜多變的環境。因此,如何提升RTK系統的穩定性、可靠性和實時性是目前亟需解決的關鍵問題。
基于此,本文提出了高穩定高可靠多平臺兼容的RTK精密定位系統:基于ARM+DSP架構的AM5728創新應用于實時解算RTK定位信息;基于冗余性設計方法的RTK定位系統創新應用于解決GNSS定位單元低兼容性問題;基于冗余方法設計的復合型高速通信鏈路提高了系統可靠性與實時性。該系統有效解決了穩定性差、可靠性低、兼容性低的問題。
1 總體設計方案
RTK精密定位系統由RTK定位解算單元、GNSS定位單元、修正信息交互單元和輔助單元組成,系統結構如圖1所示。
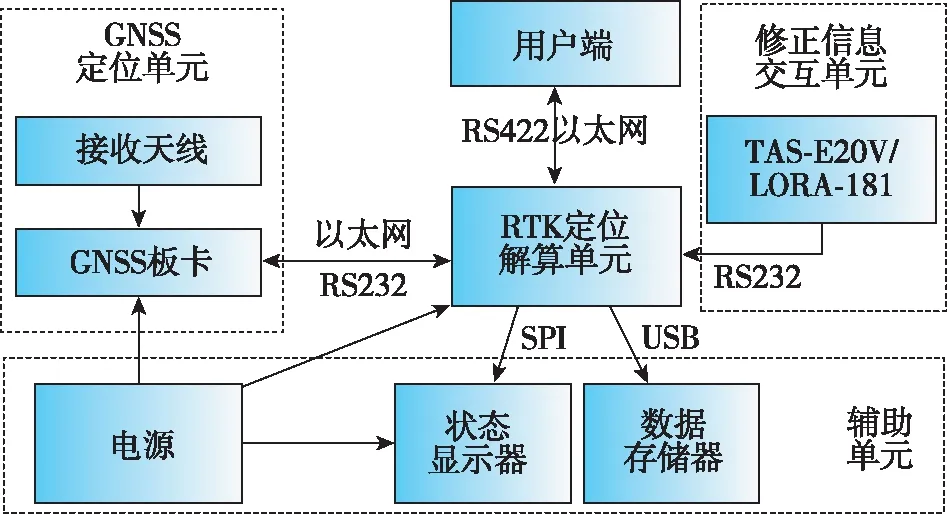
圖1 RTK定位系統框圖Fig.1 Block diagram of the RTK positioning system
RTK精密定位系統的總體技術方案具體如下:
1)GNSS定位單元:采用冗余式方法設計了GNSS定位單元,根據環境要求熱切換備份GNSS定位板卡。基于分時工作的雙GNSS定位板卡在對接收天線接收到的GNSS導航信息進行解算后,通過復合型高速通信鏈路發送給RTK定位解算單元。
2)修正信息交互單元:采用冗余式設計方法,根據工作范圍的不同,靈活選擇TAS-LORA-181或TAS-E20V完成基準站與流動站之間的定位修正信息的實時傳輸,并將定位修正信息發送給RTK定位解算單元。同時,采用遠程終端介入方法,隨時監視信息交互單元的工作狀態。
3)RTK定位解算單元:采用ARM+DSP架構的AM5728處理器,基于RTK精密定位算法實時解算GNSS數據信息生成與修正信息,并通過復合型高速通信鏈路共享信息,從而完成RTK導航定位解算。采用ARM為主DSP為輔的架構,既提高了導航信息解算的實時性,又提高了系統的伸縮性與穩定性。
4)輔助單元:目標信息通過通信接口傳輸至用戶平臺,并在本地實時存儲。此外,AM5728將當前串口工作和衛星跟蹤狀態實時顯示,增強了系統狀態的可觀測性;電源對各單元分級供電。
RTK精密定位系統具有一機雙用的技術特點,在實現實時RTK精密定位的同時能夠滿足高兼容性要求。同時,基于冗余式方法設計的各單元可以確保在當前單元故障時,提供備份工作方式,提高了RTK精密定位系統的穩定性。
2 RTK精密定位算法
雙差RTK定位模型已經得到了廣泛應用,該模型通過對衛星及基準站與流動站間進行求差得到雙差觀測方程,并進一步確定整周模糊度實現高精度定位,利用雙差觀測模型消除各種具有相關性的誤差,從而很大程度上簡化計算工作量。偽距與載波相位在進行雙差處理后的觀測方程可表示為
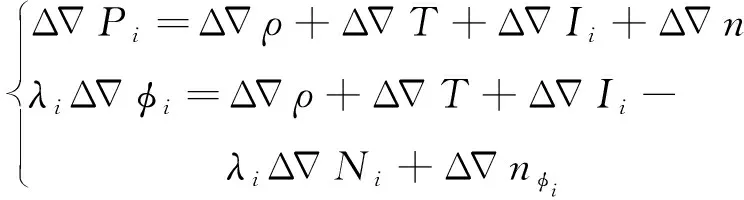
(1)


(2)

(3)
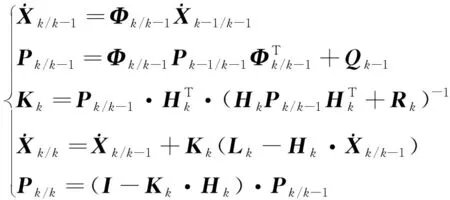
=
[′,′,′,″,″,″,?,?,?,,…,-2]
(4)
式中,′、′、′為三維坐標參數;″、″、″為三維速度參數;?、?、?為三維加速度參數;為模糊度參數。
3 RTK精密定位系統硬件平臺設計
基于總體技術方案及RTK精密定位算法,RTK精密定位系統的主要功能包括:1)高速數據解算能力;2)實時動態差分:通過解析修正信息輸出精密定位信息;3)多種無線傳輸方式:靈活選擇定位修正信息交互方式;4)多種GNSS板卡兼容:適用多種不同工作環境;5)多類型多路輸出接口:具備復合型高速鏈路,可實現交互數據的高速傳輸。由此得出其主要單元包括:定位解算單元、修正信息交互單元、GNSS定位單元及輔助單元中的通信接口。
3.1 定位解算單元
定位解算單元是RTK定位解算的核心部件,具備高速計算能力的中央處理器(Central Proces-sing Unit, CPU)是該單元設計的重點。除了高速的運算能力之外,為了系統后續的擴展性,還需要支持嵌入Linux系統,方便后續程序調試與升級。為保證數據運算的實時性,需集成高速串口、USB、CAN總線、以太網和高精度的時鐘信號。基于上述需求,選用廣州創龍公司設計的基于ARM+DSP架構的AM5728核心板為定位解算單元。
具備高速計算能力的AM5728完成對GNSS定位單元傳輸GNSS信息的預處理以及通過通用異步收發傳輸器(Universal Asynchronous Receiver/Trans-mitter, UART)接收修正信息交互單元傳輸的定位修正信息,并基于Linux系統上的雙差RTK定位程序解算出當前基準站的導航信息。此外,AM5728通過SPI通信方式將RTK接收機當前的工作狀態發送給GD32F103處理器,通過GD32F103控制指示燈表示對外輸出高速串口的通信狀態與當前導航狀態的穩定性。
3.2 修正信息交互單元
為提高系統工作的靈活性,修正信息交互單元采用冗余式設計方法,針對不同工作范圍,選擇杭州塔石公司設計的TAS-LORA-181或TAS-E20V。修正信息交互單元模式選擇示意圖如圖2所示。
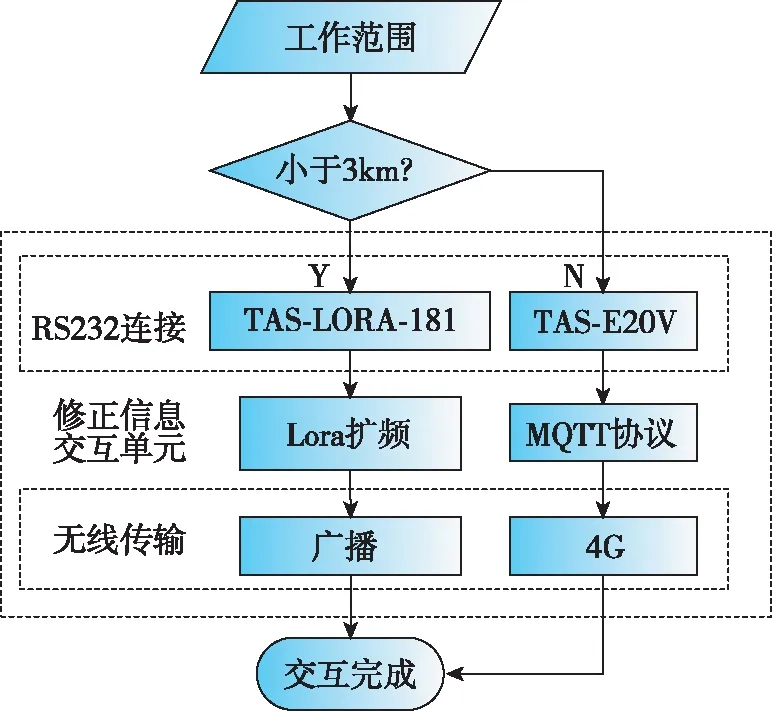
圖2 修正信息交互單元模式選擇示意圖Fig.2 Diagram of pattern selection of modified information interaction unit
針對近距離(<3km)通信時穩定性與功耗問題,修正信息交互單元采用TAS-LORA-181進行交互。TAS-LORA-181作為無線串口中斷采用Lora擴頻技術,通過RS232與定位解算單元相連,實現近距離定位修正信息在基準站與流動站之間的實時傳輸。
針對中遠距離(≥3km)通信實時性、穩定性與可靠性問題,修正信息交互單元采用TAS-E20V。TAS-E20V支持消息隊列遙測傳輸(Message Queuing Telemetry Transport, MQTT)協議,該協議的低開銷、低帶寬特點極大節約了AM5728的運算消耗;此外,修正信息經TAS-E20V以4G傳至定位解算單元,提高了系統實時性。中遠距離信息交互過程如圖3所示。

圖3 中遠距離修正信息交互示意圖Fig.3 Medium and long distance correction information interaction
由圖3可知,定位解算單元中的定位修正信息來自于修正信息交互單元,修正信息交互單元基于UART將信息傳輸至定位解算單元。在RTK基準站中,通過TAS-E20V與定位解算單元結合,將修正信息通過UART實時傳輸至TAS-E20V后,基于4G網絡傳輸至RTK流動站。此外,為方便遠程調試以及監控單元狀態,交互單元設計有短信與網絡兩種指令工作模式,可以基于短信或Internet實時配置修正信息交互單元,實時遠程監測、調整修正信息交互單元,從而進一步提高系統穩定性與可靠性。
3.3 GNSS定位單元
GNSS定位單元是RTK定位系統的重要信息來源,其輸出的原始觀測信息是RTK定位的基礎。因此,保證穩定捕獲跟蹤衛星信號及穩定可靠獲取定位信息是GNSS定位單元設計的關鍵環節。
為了在兼顧系統兼容性的同時保證系統的可靠性和穩定性,采用冗余式方法設計GNSS定位單元,不僅具備雙GNSS板卡熱冗余備份的工作方式,而且可以基于高覆蓋的GNSS板卡選型提高系統兼容性。基于不同的環境要求,RTK精密定位系統選擇不同的板卡配合完成任務:針對要求全面支持北斗三號衛星、全星座全頻點定位且支持RTK星鏈續航時,裝載P40;針對RTK作業距離50km左右、E-RTK測量作業距離300km左右且要求高可靠載波精度時,裝載K708;針對支持全系統全頻點且要求1s內完成RTK重新捕獲以及熱啟動時,裝載UB482;針對要求厘米級差分定位并支持SPAN GNSS+INS組合導航技術時,裝載OEM719;針對要求1mm的載波相位觀測值、厘米級高精度RTK定位且支持全系統全頻點時,裝載UB4B0M。因此,針對復雜的環境要求,GNSS定位單元以不同系列的五款GNSS板卡(P40、K708、UB482、OEM719、UB4B0M)為例,采用冗余式通信接口復用方式展開設計。根據定位單元的工作狀態,采取遠程操作方式切換系統內熱冗余備份的另一套GNSS定位板卡完成GNSS信號處理作業,從而提升系統的可靠性和穩定性。
基于此,系統通過GNSS板卡對衛星天線接收的導航信息進行捕獲解算,結合各高精度定位板卡的情況,GNSS定位單元通信接口關系如圖4所示。
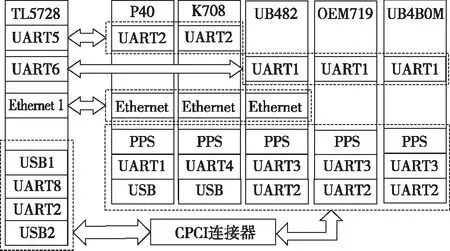
圖4 GNSS定位單元通信接口關系圖Fig.4 Communication interface diagram of GNSS positioning unit
3.4 輔助單元
為了提高系統的普遍適用性,各單元間采用復合型高速鏈路進行通信,通過串口、以太網、CAN實現數據交互,通過USB實現數據的冗余存儲備份。因此,RTK系統共有UART、USB、CAN、Ethernet四類對外通信接口。其中,UART、USB、CAN均滿足高速數據交互的要求。以太網是RTK定位系統的調試接口,可以遠程登入RTK定位系統的Linux操作系統,方便隨時對系統進行調試,并且可以通過SSH對Linux系統中的數據進行讀寫以及對系統內程序進行升級。基于復合型高速鏈路的設計方法,提高了系統各單元間通信的穩定性與可靠性。RTK定位系統通信接口如圖5所示。
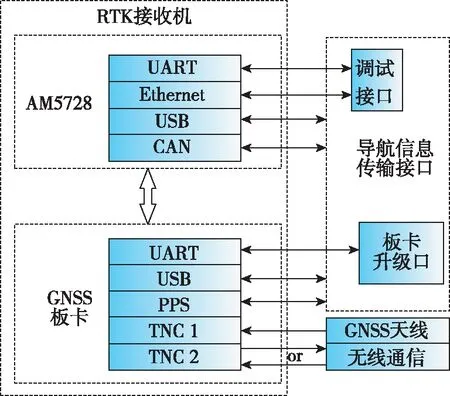
圖5 RTK定位系統通信接口示意圖Fig.5 Communication interface of the RTK positioning system
2個外接TNC天線接口采用標準同軸電纜工藝,TNC1負責連接GNSS天線,TNC2負責連接TAS-E20V與TAS-LORA-181,發送、接收修正信號。此外,預留UART接口以滿足后續因衛星導航水平提高而可能產生的GNSS板卡固件升級需求。
4 實驗測試及性能考核
為考核基于RTK精密定位系統的性能,設計了定位性能考核實驗,以經過多頻多模全球衛星導航定位系統多重標定的精準定位結果為參考,通過對比RTK定位結果與定位參考的最大位置誤差、平均位置誤差以及CEP結果,評估RTK精密定位系統的可靠性與精準性。RTK定位系統的衛星天線擺放地點要與定位參考點完全重合或盡量接近。然而,由于2個天線存在高度差,如果擺放過近會使得二者相互遮擋,進而影響衛星信號質量及連續性。為精準確定衛星天線的最佳擺放距離,針對智能天線和參考衛星天線的實際擺放位置進行了多次實驗,擺放距離在15~25cm為宜,因此,選定衛星天線的擺放距離為15cm。為避免環境因素影響,流動站裝于實驗車上,周圍無明顯遮擋物。圖6給出了實地測試情況圖。圖7給出了RTK定位實測偏差結果。

圖6 實地測試情況圖Fig.6 Pictures of field test
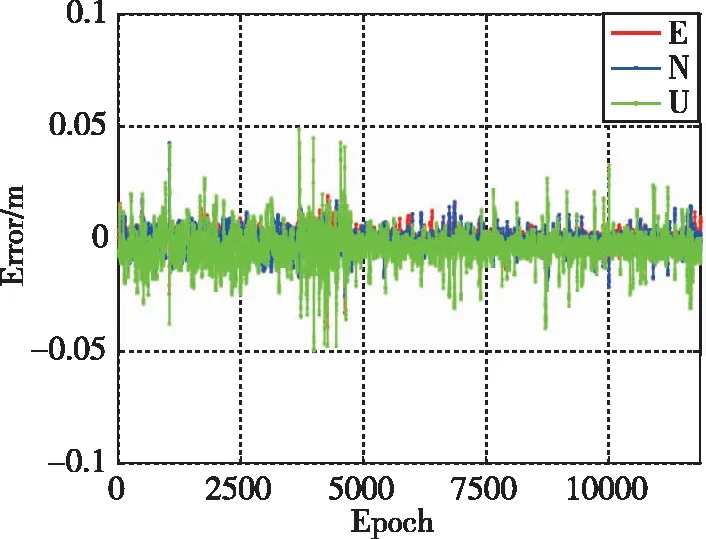
圖7 RTK定位實測偏差結果Fig.7 Results of deviations in RTK positioning measurement
如圖7所示,在東、北、天向上,根據位置偏離誤差的波峰與波谷可以看出,數據整體在±0.05m范圍內波動,為進一步分析系統穩定性與可靠性,計算最大位置誤差、平均位置誤差以及實驗數據標準差,表1所示為東、北、天向的位置偏離誤差。
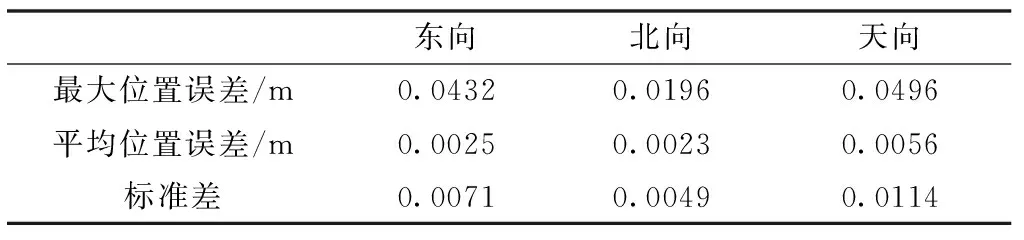
表1 位置偏離誤差
由表1可知,系統最大位置誤差為0.0496m,平均位置誤差最大為0.0056m,均在可接受范圍內。基于實驗數據標準差,東向、北向實測的CEP值為0.0071m,天向的標準差比東北天的標準差有所增加,這是由于單天線導航系統不利于精準測量高程信息導致。因此,RTK精密定位系統具備連續穩定可靠的精密定位能力,可實時輸出精密定位結果。
5 結論
本文針對RTK定位系統存在的穩定性、可靠性差與系統兼容能力低等問題,提出了高穩定高可靠多平臺兼容RTK精密定位系統設計。硬件平臺實現以及后續實驗驗證表明:
1)基于冗余性設計方法的RTK定位系統設計思路具備可行性。本文設計的GNSS定位單元通過冗余性設計方法解決了單一RTK系統僅支持單一GNSS板卡的兼容性問題,為后續解決多平臺兼容問題提供了思路。
2)基于ARM+DSP架構的RTK精密定位解算架構實現了RTK實時精準解算,復合型高速通信鏈路確保了各單元間實時有效信息交互,通過CEP評估標準評估RTK定位精準性,其CEP=0.0071m,并且定位結果連續穩定輸出。
3)本文提出的修正信息交互方法采用廣播與4G兩種傳輸方式相互切換使用,后續在實時性要求更高的場合,可以增加5G傳輸方式,進一步提高修正信息傳輸的實時性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
中華手工(2017年2期)2017-06-06 23:00:31
Coco薇(2017年5期)2017-06-05 08:53:16
中外會展(2014年4期)2014-11-27 07:46:46
舒適廣告(2008年9期)2008-09-22 10:02:48
