基于壓電傳感器的零點漂移改善電路的研究
2022-03-30 14:03:14張德彪
計算機測量與控制 2022年2期
關鍵詞:信號
王 帥,李 杰,張德彪,孫 寧,江 杰
(中北大學 儀器科學與動態測試教育部重點實驗室,太原 030051)
0 引言
在現代化國防時代,制導彈藥是國家國防力量的重要體現。為了彈藥的順利列裝,列裝前需要各項大量的試驗測試數據來支撐。其中彈載記錄儀就是這些彈體從裝填、擊發、飛行、毀傷的一系列過程中,對各項動態參數的采集和存儲的核心組部件。為了能夠實現對目標最大程度地精準打擊,提高作戰效費比,對侵徹過程的沖擊加速度的測量顯得至關重要。通過對侵徹目標的過程中采集到的信號數據進行分析和處理,提取信號特征,輔助相關引信技術控制其在合適的時刻啟動飛行舵機,展開彈體尾翼,控制起爆時刻,從而完成精確打擊。對我國國防事業具有極其重大的意義[1]。
加速度計作為現代動態測試領域中力電轉換的核心器件,這類傳感器主要分為壓電式和壓阻式。壓阻式加速度傳感器為電阻性,低阻抗,壓阻式加速度傳感器的頻率響應范圍相對偏窄,在恒定方向加速度下壓阻式加速度傳感器不輸出相關信號,不適合應用在彈體的動態參數的測試。壓電式加速度傳感器有較寬的頻率響應范圍,并且在其頻率相應范圍內具有良好的線性度,但是在使用中需要考慮傳感器的電壓靈敏度與電荷靈敏度[2]。但是在高過載惡劣環境下,壓電式加速度傳感器會有零點漂移現象使沖擊信號失真,對高過載連續動態參數的測量以及長時間精確參數測量造成不可接受的影響[3]。
本文通過對壓電傳感器的零點漂移現象的機理分析,提出在前端信號采集的調理電路中用晶體管與運算放大器搭建了加推挽電流放大級的電荷放大器方案,在保持彈載記錄儀小型化的原則下,最大程度簡化電路分別利用PNP和NPN兩個三極管形成推挽電路,增強電路驅動能力,低阻電壓輸出,使得電荷轉換電路中的放電效率大大提升,從信號源頭實現補償優化,在數據不失真的前提下,使侵徹目標時的加速度沖擊波形更加平滑,去除由于放電不及時產生的零點漂移現象。
1 零點漂移現象的機理分析
彈載記錄儀在惡劣環境下實現對連續高過載動態參數的采集存儲。其對具有一定深度的目標進行打擊時,由于彈藥裝填,彈藥擊發,觸靶穿透等一系列動作在短時間內進行,所運用的高精度壓電式加速度傳感器又普遍存在零點漂移的現象,影響測試中高過載沖擊信號的可靠性與真實性。在存在零點漂移的情況下,對所測量的加速度信號曲線進行積分運算時,經過兩次積分后彈體速度與彈體行程出現嚴重誤差,無法向導航計算機提供準確數據,從而影響相關引信技術控制起爆時刻[4],對后期的相關引信技術的研究中造成巨大影響。
在前期初樣研制過程中,為獲取壓電式傳感器零點漂移相關信號特征,進行彈載記錄儀的高過載沖擊試驗,試驗后由對試驗數據處理分析,數據顯示測得的侵徹過程原始時域過載曲線如圖1所示。
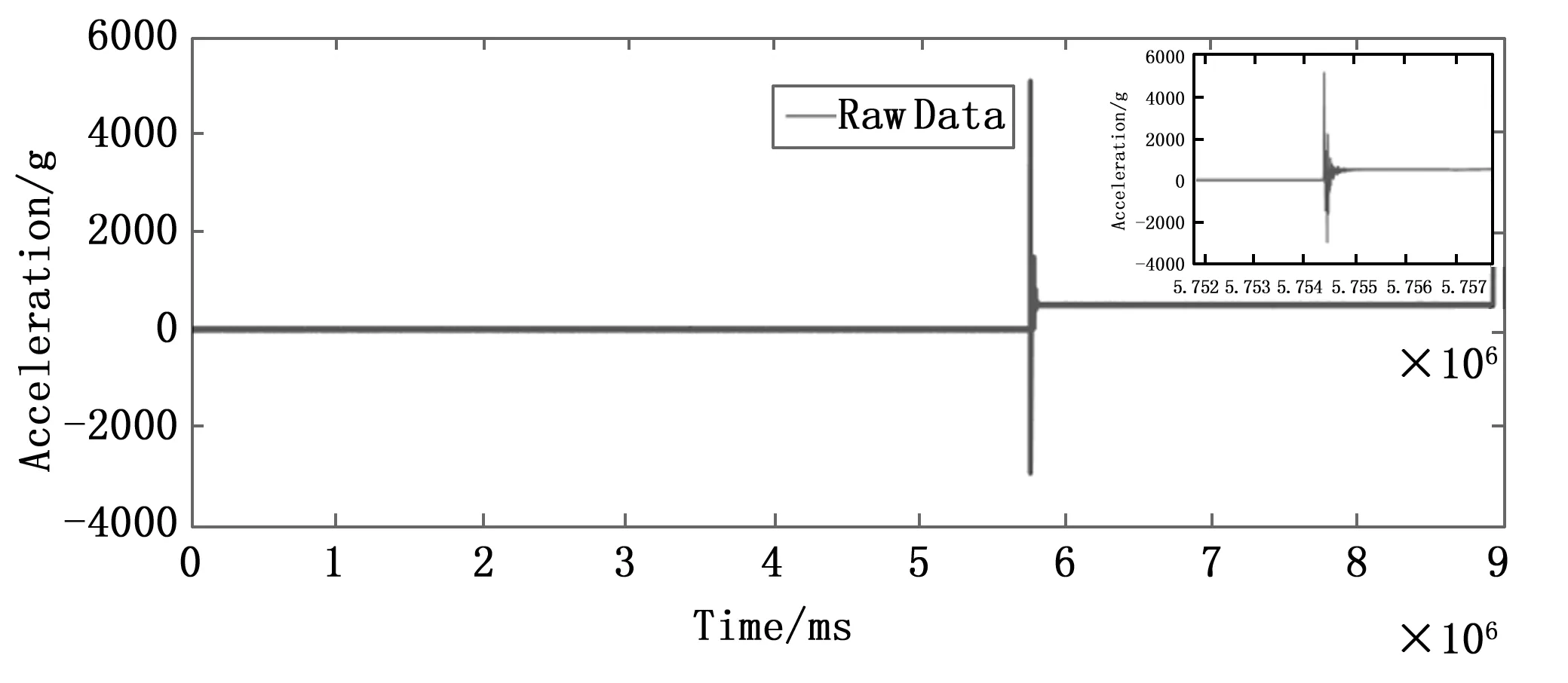
圖1 侵徹過程原始時域過載曲線
由圖1所示,在575 s左右,原始時域過載曲線中出現嚴重的零點漂移現象。
在此之前前人普遍創新使用小波分析的方案進行后期數據處理分析。選出消除零點漂移時的最優小波基函數,進行零點漂移的消除[4]。小波分析是針對頻率的局部化分析,通過伸縮平移運算對信號進行不同尺度的細化,得到高頻、低頻不同頻域處的細分分析。但是小波分析中包含多種不同的小波類型,常用的是Daubechies小波和Morlet小波,同時還有Haar小波、Mexican Hat小波、Meyer小波、Symlet小波[5-6]。不同的小波有不同的特性,分別用來逼近不同的特征信號,才能得到最佳結果。而且這種算法方案只能適用于事后解算,這明顯對于工程實際情況不是最優解。
壓電式傳感器需要對輸出電荷信號進行電壓轉換,這必然用到電荷放大器。電荷放大器是一種高阻抗,高增益,電容反饋電路[7-9]。當施加交變力時,兩極板聚集異性電荷q時,則兩極板就呈現出一定的等效電壓Uα,即為:
(1)
其中:C為壓電等效電容量。
(2)
式中,A為極板面積;h為極板厚度;ε壓電晶體的介電常數;εr為壓電晶體的相對介電常數;ε0為真空介電常數;壓電傳感器極板電容都存在等效的泄漏電阻,對壓電傳感器來說,交變力會引起電荷產生,而這些電荷電量q隨后就通過泄漏電阻逐漸泄放完畢。但是由于電荷放大器的高阻抗特性,導致壓電傳感器在達到采集最高值時電量沒有完全釋放出來,在以后在采集過程中一直存在緩慢放電現象,對之后的采集信號造成不可預估的影響,從而產生了零點漂移的現象[1],所以解決零點漂移問題的核心在于控制電路放電效率。
2 對加速度信號測量電路的研究
2.1 基于跟隨器電路的分析
對壓電式傳感器輸出電荷信號的測量,采用電壓放大器的高阻跟隨器電路如圖2所示,用等效輸入電阻Rin和等效輸入電容Cin表示,其中等效輸入電容包括跟隨器輸入端電容,以及從傳感器到跟隨器的傳輸線等效電容。
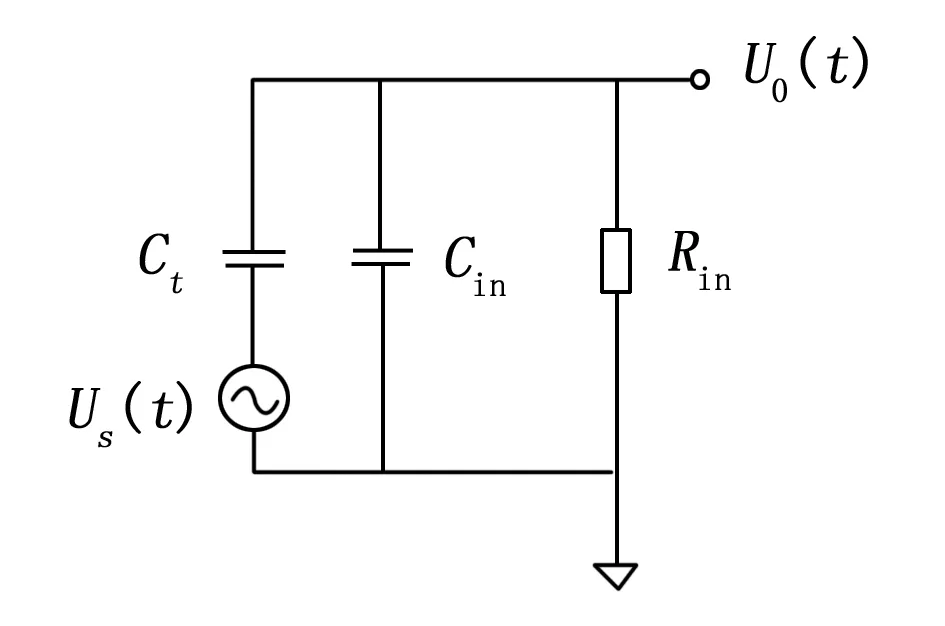
圖2 高阻跟隨器電路
由于輸入等效電容Cin對測量的影響,以及實際測量信號是由正弦波構成,所以不考慮階躍方波信號等其他信號的信號調理分析,此時有式(3):

(3)
(4)
其中:Us為原始輸入信號,Ut為跟隨器輸入信號。寫成頻域表達式為:
(5)
此時有:
可見其中的頻率增益和特征頻率都受到Cin的影響。但是Cin具體的值在實際情況中無法確認,所以我們只能盡可能減小Cin的值,但是我們無法判端實際情況中能否將Cin降低到足夠小,所以我們的跟隨器方案不能滿足實際運用條件,就需要考慮使用電荷放大器。
2.2 基于電荷轉換電路的分析
在基于電荷轉換電路的原理分析的基礎上,針對電荷放大器零點漂移現象,建立核心元器件的等效電路模型,如圖3所示,圖中US為壓電式加速度傳感器等效激勵源,CS為壓電式加速度傳感器的等效極間電容,Rd為電荷放大器的等效輸入阻抗以及信號傳輸導線電阻之和,CIN為電荷放大器的等效輸入電容與導線電容之和,Cf為電荷放大器的反饋電容,Rf為電荷放大器的反饋電阻,反饋電阻是為了避免偏執電流持續為反饋電容Cf充電導致反向電壓飽和而存在的,UIN+與UIN-為電荷放大器正向輸入端與反向輸入端的電壓,由于運放的輸入阻抗近似與無限大,所以在常規電路中通常將UIN+接地,視為0 V[10]。
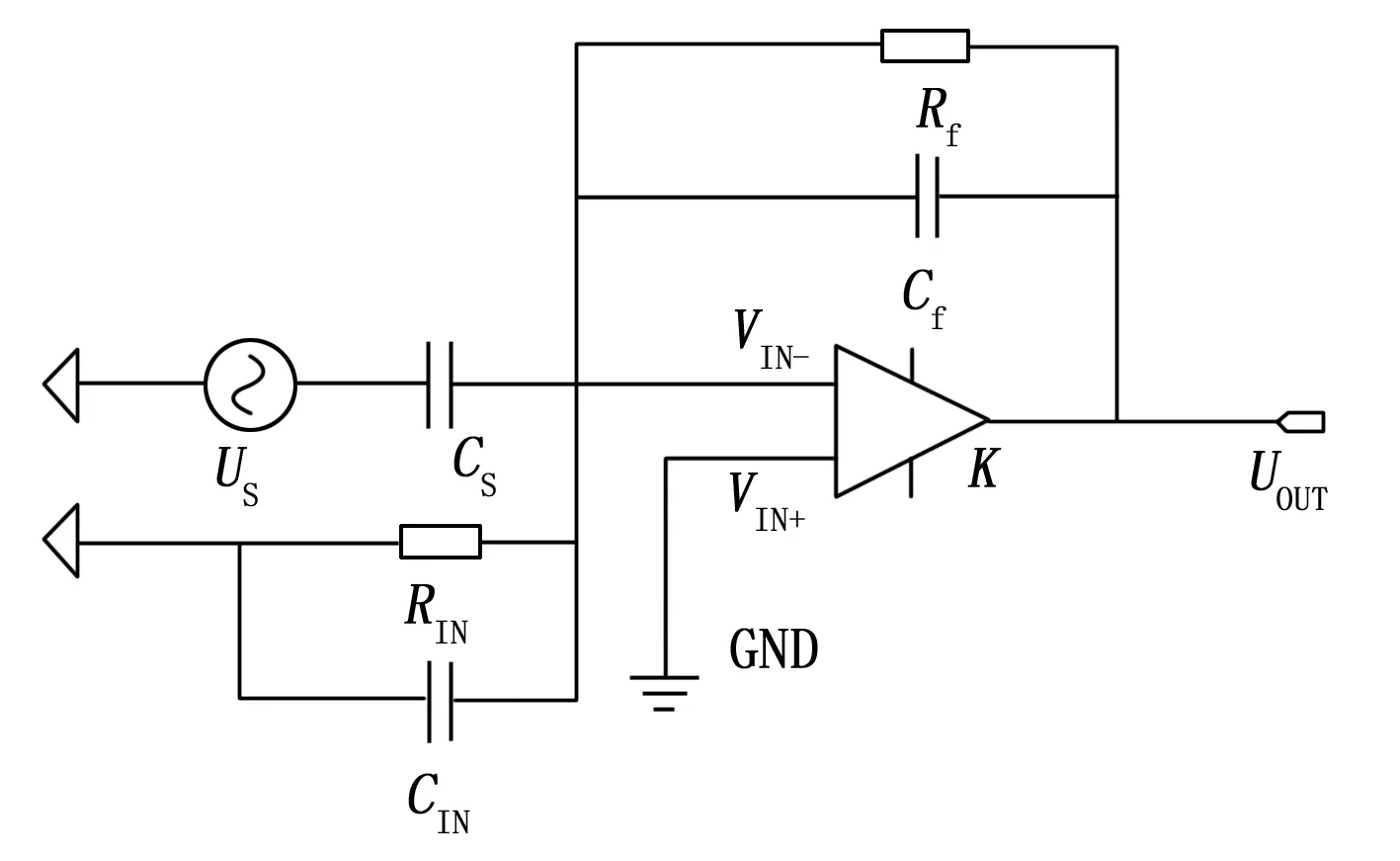
圖3 電荷轉換等效電路
對于圖3的電荷轉換等效電路,運用基爾霍夫電壓定律(KVL, Kirchoff’s voltage law),基爾霍夫電流定律(KCL,Kirchoff’s current law)[5-7],在圖3中的A點通過節點電壓可得:
(6)
其中:T為時間常數,即為電容充電飽和時間的倒數。化簡式(6)可得:
(7)
UIN+接入等效地,視作0勞V,為開環增益,由于運算放大器的開環增益特性可知:
VOUT=K(UIN+-UIN-)=-KUIN-
(8)
將式(8)代入式(7)可得UOUT表達式,為簡化公式,我們定義CALL=Cf+CS+CIN:
(9)
本設計使用的是電荷敏感型傳感器,故將傳感器激勵源電壓與傳感器輸出電荷量Q之間的關系式導出:
(10)
將式(10)代入式(9)中:
(11)
由上式可知,消除了US壓電傳感器激勵源的影響,反饋電阻Rf主要影響電荷放大器的截止頻率,我們對反饋電阻Rf盡量選擇阻值較大的電阻,從而使得截止頻率的下限盡可能小一些,對零點電壓漂移不產生直接影響。所以主要針對CALL進行調整分析,從而改變VOUT即零點漂移的輸出電壓。CALL由CS、CIN、Cf組成。CS為壓電式傳感器極間電容,這屬于傳感器特性,不可改變。CIN為輸入電容與電纜電容之和,同樣是固定屬性。所以反饋電容Cf是關鍵因素,Cf容值越小增益越大。從而達到電荷放大器的相關參數進行調整,對電荷放大器的漂電壓進行修正。
2.3 基于推挽電路的分析
推挽電路是使用兩個相同的功率的三極管,以推挽的形式存在于電路中,分別負責正負半周期的波形放大任務。兩個三極管的輸出在負載上合并得到完整周期的輸出信號[11]。要向負載提供足夠的輸出功率,即電壓電流都放大的情況,此時最大輸出功率為:
(12)
式中,Ucem為集電極輸出的正弦電壓,Icm為集電極輸出的電流。
電路的效率為:
(13)
式中,P0為放大電路輸出給負載的功率,PV為直流電源VCC提供的功率。
如圖4所示,使用PNP型三極管代替發射極負載電阻,NPN型三極管將電流推給負載,PNP型三極管吸收電流。

圖4 推挽電路
對圖4中的推挽電路進行Multisim電路仿真,得到的仿真輸出波形如圖5所示。
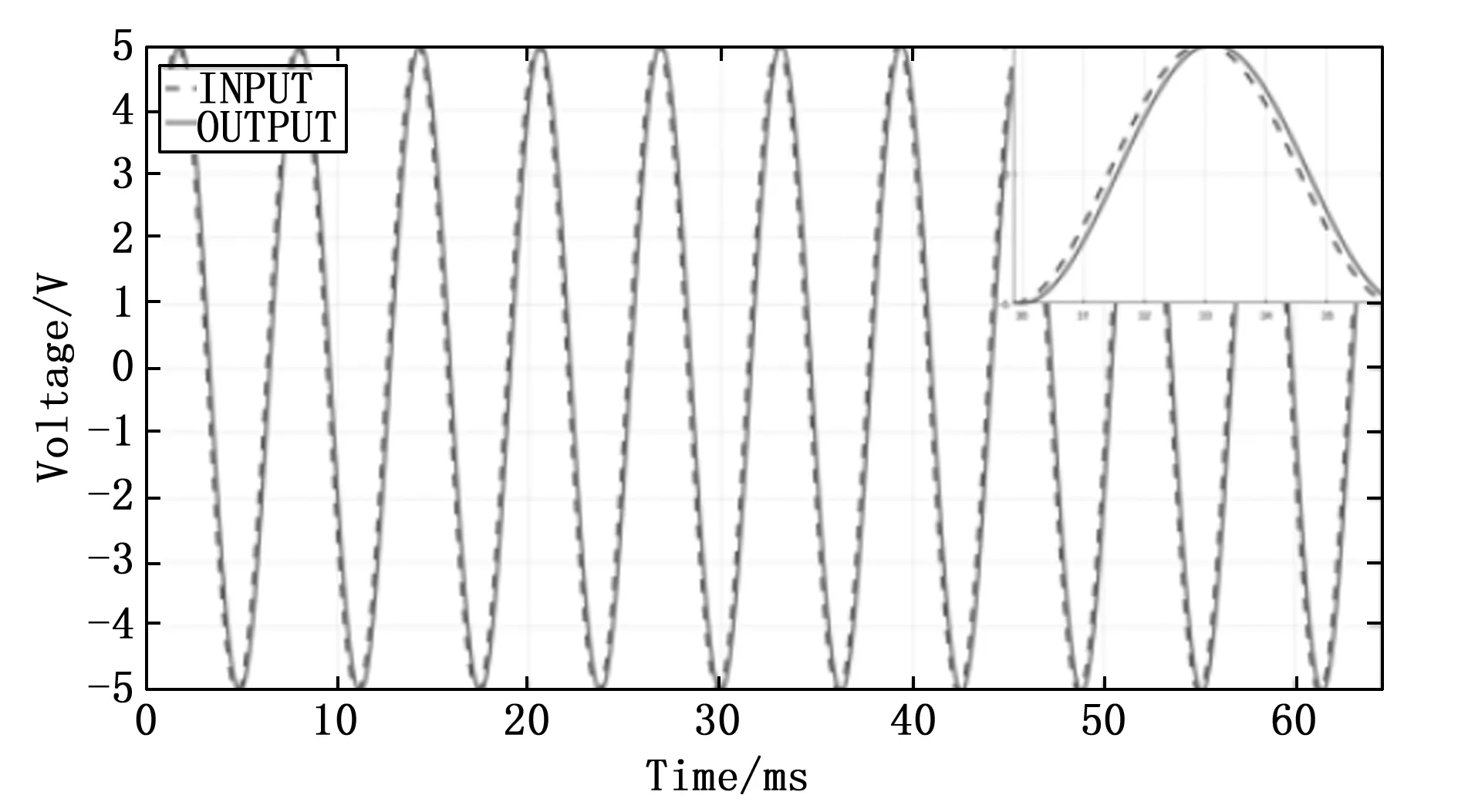
圖5 推挽電路仿真波形
看到圖5中放大的推挽電路仿真波形,可見輸出波形并沒有完全被截去,在0 V附近出現了交越失真的現象。這是因為在實際運用中,把不為零的門限電壓視作為零,而且在三極管輸入電壓較低的情況下,輸出電壓存在著死區,在這段區間內,電壓和電流的關系不是線性的,三極管基極與三極管發射極電位差小于0.7 V,三極管截止,所以在輸出波形中央產生±0.7 V的死區。
為了改進電路中的交越失真,加入二極管消除晶體管盲區[12]。加入二極管后,使得兩個三極管的基極與發射極之間的電位差為0.5 V,輸入信號在0 V附近變化時,發射極能導通,可見二極管抵消了晶體管的交越失真。抵消后波形如圖6所示。
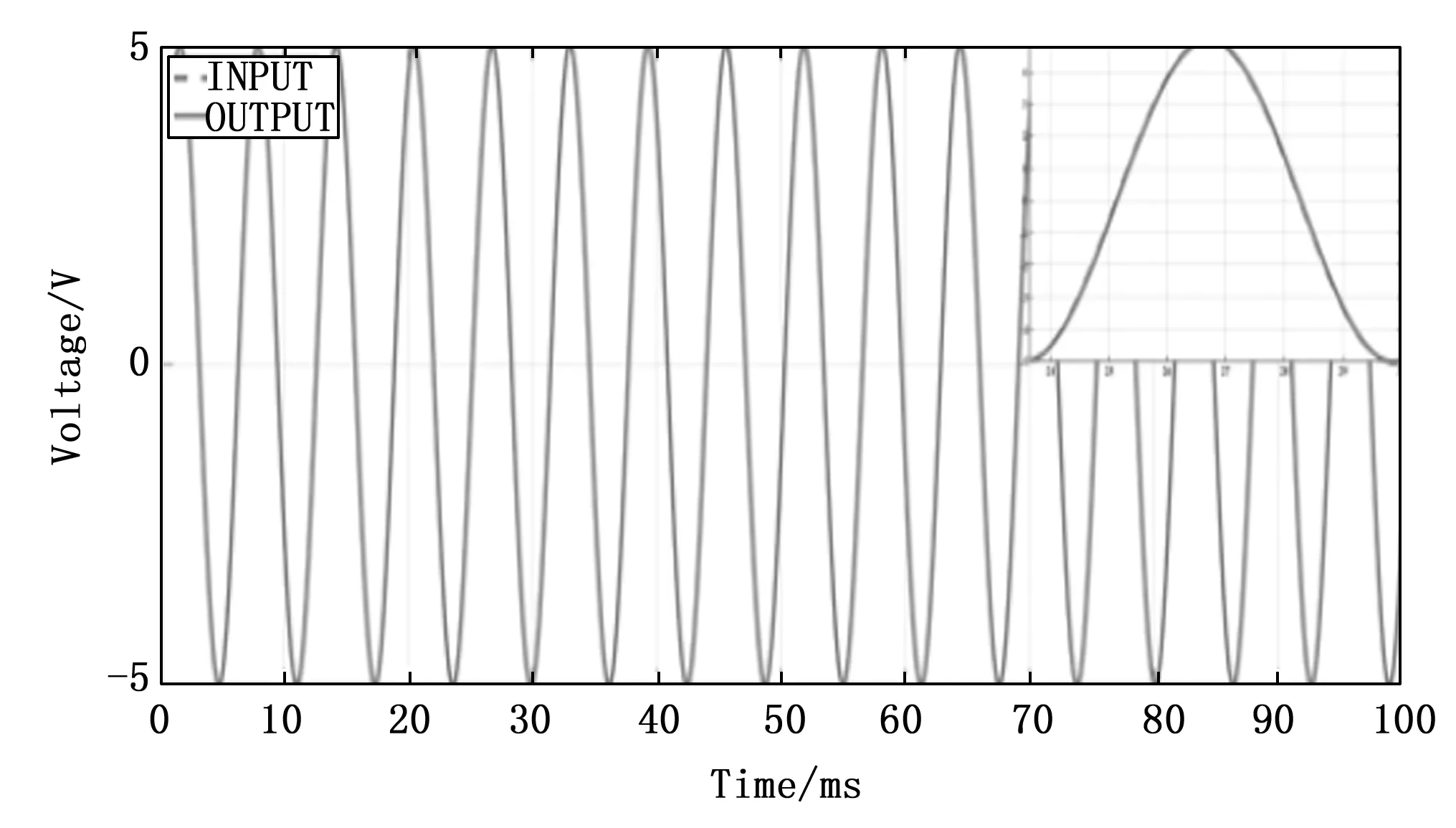
圖6 抵消交越失真現象后的波形
3 加速度測量電路的系統級設計
3.1 系統級設計
根據上文,試驗現象與分析結果,設計彈載高精度數據記錄儀。系統主要由傳感器信號調理電路、高速模數轉換電路,FPGA(field programmable gate array)采集控制電路,Flash存儲電路,通信接口電路,內部電源模塊等部分組成[13]。系統總體框架如圖7所示。
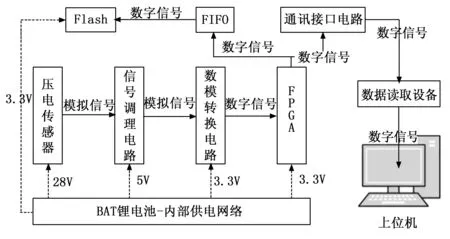
圖7 彈載記錄儀的總體框架圖
系統供電網絡采用7.4 V-500 mAh的鋰電池通過級聯降壓的方式進行電壓轉換,以便于為各電路子模塊和前端傳感器供電。FPGA采集控制電路控制高速模數轉換器對經過信號調理電路的壓電傳感器信號進行采編,經過FIFO(first in first out)跨時鐘域緩存后寫入NAND Flash。待試驗結束后,通過數據讀取設備和上位機軟件將彈載記錄儀中的數據讀取至上位機。最后通過數據處理軟件進行相關傳感器的數據處理,獲取完整測試信號。
該信號調理電路如圖8所示,該電路分別用兩種不同極性的晶體管間組成推挽電路,增強其驅動能力[14]。PNP型和NPN型三極管以推挽的形式存在于電路中,各自負責正負半周期的波形放大任務。此處的Cf應當盡量選擇高泄露小容值電容,這里使用的是1 nF的電容,具有良好的吸附效應。同時這里運用的運算放大器OPA129U的輸入電阻可不做過多考慮,它自身具有1013Ω的差模輸入電阻[11]。運算放大器輸出端接5.0 V的鉗位二極管,以保證在測量信號在超量程時輸入推挽電路的電壓不會超過5.0 V[15-16]。保護后端高速模數轉換芯片在正常工作中不會因此受損。

圖8 信號調理電路原理圖
使用傳感器頻率響應相似的信號對整體信號調理電路進行仿真,仿真結果如圖9所示,可以完整采集模擬信號值。
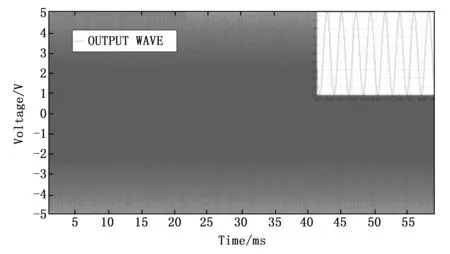
圖9 信號調理電路仿真波形
系統集成后固化處理,使用馬歇特錘擊模擬高過載沖擊試驗,得到高過載沖擊信號數據,如圖10所示。

圖10 高過載沖擊信號曲線
可以明顯看出在高過載沖擊的惡劣環境中,本研究設計的信號調理電路已經去除壓電傳感器的零點漂移現象。
實測過程中過載峰值與理論預算值差距較大,實測值明顯大于理論預算值。我們對得到的測試沖擊信號進行分析。在信號分析領域有許多處理方法和工具,其中最常用的是傅里葉變換,它將時域信號轉換為頻域信號,從而可以在頻域對信號進行分析[18-19]。對于圖10所示的數據進行快速傅里葉變換(FFT,fast fourier transform),進行頻譜分析。得到頻譜如圖11所示。
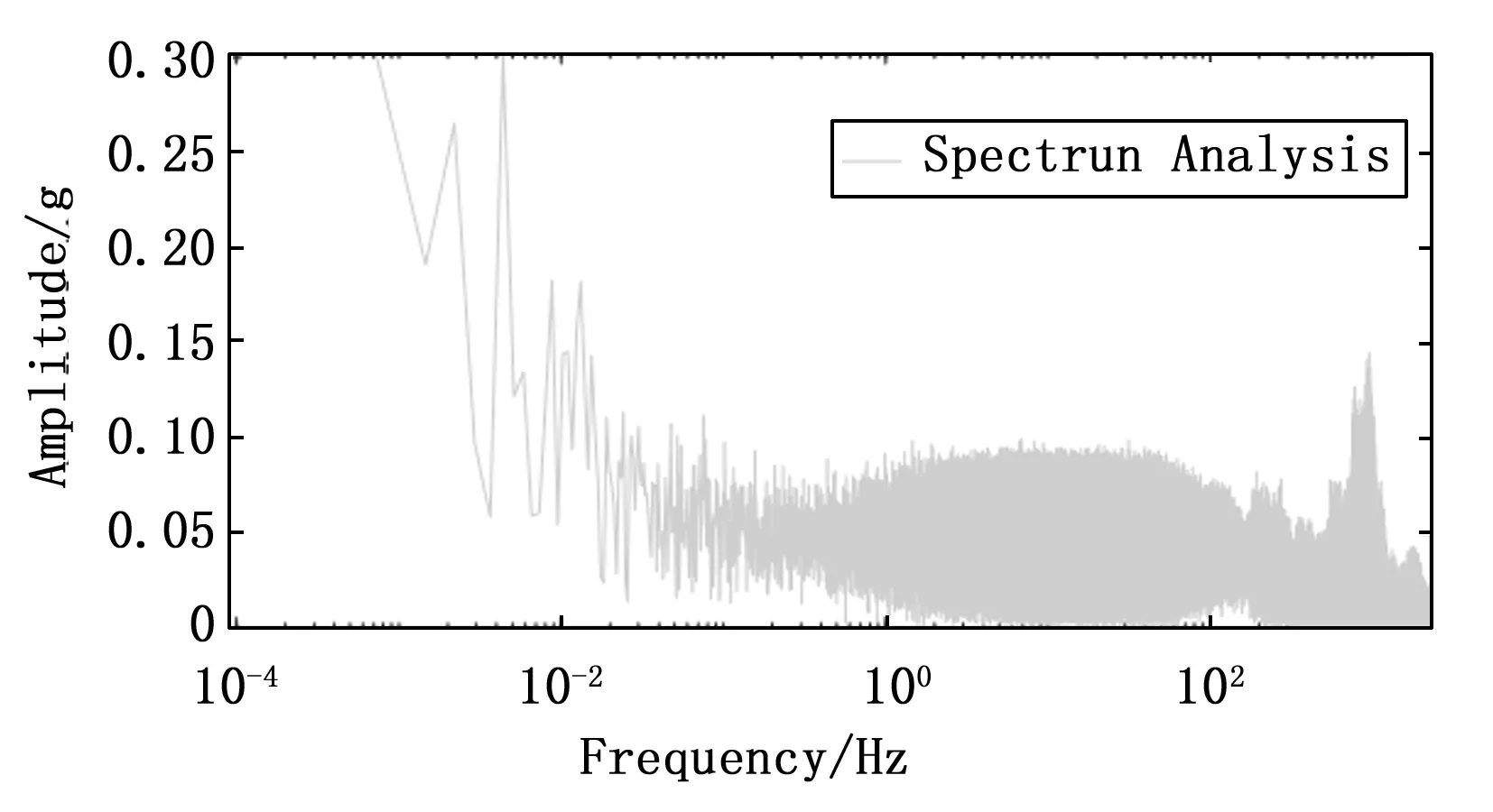
圖11 高過載沖擊原始數據頻譜分析
在頻譜中存在高頻信號,101~104Hz混入整體信號頻譜中,預測造成這種現象是由于試驗環境中彈載記錄儀與試驗設備剛性硬連接,模擬侵徹過程中混入多種頻率噪聲,產生傳感器自振與機械共振的現象,共振是指機械系統所受力學激勵的頻率與該系統的固有頻率相接近時,系統振幅顯著增大的現象[17]。對于壓電傳感器來說,共振現象會造成采集的信號值峰值增大,并且會造成對于峰值出現的時間不確定性,最終導致沖擊信號失真,降低信號可信度。根據所選壓電式加速度傳感器數據手冊,可知其主要參數如表1所示。
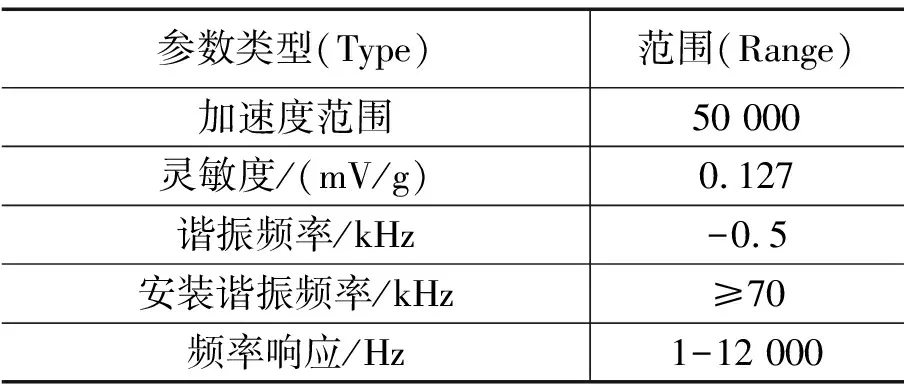
表1 壓電式加速度傳感器主要參數
可見所用的壓電式傳感器的頻率響應為1~12 kHz。安裝的機械諧振頻率大于70 kHz,正好符合我們的預初分析,所以在頻譜圖中,頻率大于12 kHz的信號肯定不是傳感器所采集到的正常信號。為了保證信號不失真以及信號可信度,并且消除信號中高頻諧振與傳感器自振造成的振動幅值增大的現象以及實現抗混疊濾波,必須選用低通濾波器濾除信號噪聲。
根據對實測數據的頻譜分析結論可知,有效信號基本保留在10 kHz以下,在后期進行數據處理解算的過程中,使用數據處理軟件進行10 kHz低通濾波操作驗證預先設想,得到高過載沖擊信號如圖12所示。此時接近真實值,與理論預算值基本吻合,在添加濾波操作后,可以完全實現動態常規彈藥侵徹過程過載連續動態特性的測量。

圖12 10 kHz低通濾波后的沖擊信號圖
為了更加符合設計初衷,實現完成動態常規彈藥侵徹過程過載連續動態特性測量的最簡化操作,盡可能去除一切需要事后數據處理的操作。在不更改硬件電路以及不添加附加設備基礎上,在FPGA的環境下,利用FIR(finite impulse response)濾波器實現對信號進行低通濾波操作。
不同的FIR類型可以設計不同類型的濾波器。各種窗函數的頻譜特征主要區別在于主瓣寬度,幅值失真度,最高旁瓣高度與旁瓣衰減速率等參數[10]。利用Matlab中選擇一定的窗函數進行FIR濾波器的參數設計,常用的窗函數參數如表2所示。
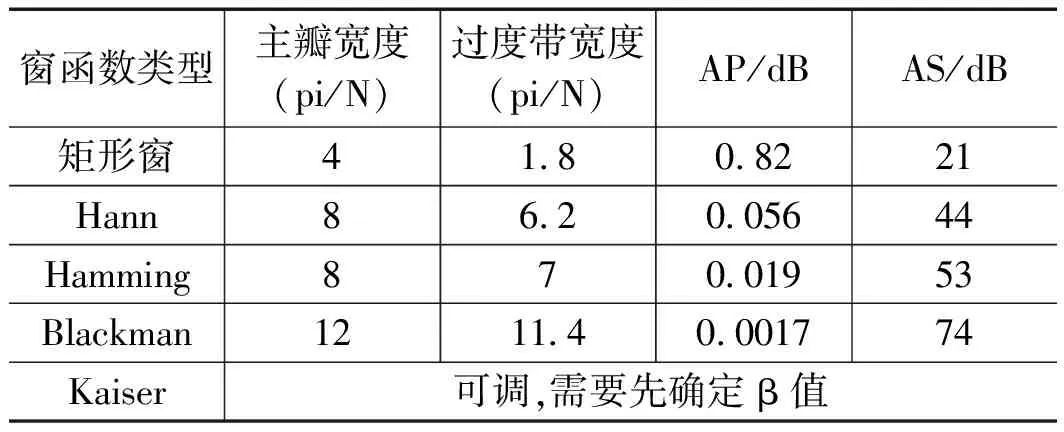
表2 窗函數主要參數選擇
在基于窗函數的基本概念下設計濾波器的本質是選擇一種合適的理想頻率選擇性濾波器,然后將它的沖激響應截短,以獲得一個具有線性相位的FIR濾波器[20]。因此這種方法的關鍵是選取某種響應頻率較好的窗函數,在濾1波器性能給定的情況下,盡量選擇主瓣窄,旁瓣峰值小的窗函數。實現FIR濾波器的過程其實就是實現卷積和累加的過程,公式如下式所示:

圖14 Verilog中實現低通FIR濾波器

(14)
從式(14)中可以看出,x(n)是我們的待濾波信號,h(n)是濾波器抽頭系數,卷積的過程其實就是一個相乘、累加的過程[21]。
確定濾波器的階數M,需要先確定濾波器的長度N,對于除了Kaiser窗以外的窗函數,比如Hann窗,N的值由下式(15)可以推算出:
N=mod(N+1,2)+N
(15)
階數M為N-1且為偶數所以用FPGA實現8階FIR濾波器的主要分成三級流水線,如圖13所示。第一級流水線將輸入信號延時,每到來一個時鐘信號,便將輸入信號保存至寄存器,然后,之后的輸入信號會進行移位操作;第二級流水線將經過緩存的輸入信號與濾波器系數相乘,每到來一個時鐘就將乘積結果更新到寄存器中;第三級流水線將輸入信號和濾波器系數相乘結果累加起來輸出。

圖13 FIR濾波器實現原理
通過Vivado調用乘法器DDS IP核,將兩個正弦信號進行混合頻率處理,然后輸入至FIR濾波器IP核的wave_in端口,在Vivado中進行程序仿真,使用Hann窗設計FIR濾波器的參數,觀察FIR濾波器的濾波功能實現,如圖14所示。
4 試驗驗證與分析
在方案論證通過后,系統集成使用環氧樹脂進行灌封固化處理,再進行使用馬歇特錘擊模擬過載沖擊試驗,現場如圖15所示:模擬在實彈環境下的常規彈藥侵徹過程高過載連續動態特性的測量試驗,測試零點漂移現象的改善與實時濾波效果。

圖15 馬歇特錘擊試驗
將馬歇特錘擊試驗的參數調整至驗證試驗同樣參數,獲得過載幅值相近,沖擊頻譜相似的沖擊信號。彈載記錄儀在試驗過程中表現良好,彈載記錄儀沖擊信號如圖16所示。

圖16 彈載記錄儀沖擊信號
由圖可見,基于壓電式加速度傳感器高沖擊侵徹加速度測量電路可以實現在信號源頭處解決由于高過載引起的零點漂移問題,并且系統在FPGA中實現實時低通濾波,逼近真實數據,獲去真實動態參數,完全解決所有需要事后進行的數據處理操作,簡化整體彈體連續動態參數測量的實驗步驟,一定程度上縮短了彈藥的研制周期。
5 結束語
本文介紹了基于壓電式加速度傳感器高沖擊侵徹加速度測量電路中零點漂移現象改進的相關研究,提出了一種可以解決侵徹過程中由于高過載導致信號調理電路放電不及時所產生零點漂移現象的解決方案,并且在FPGA中實現實時低通濾波,逼近真實數據,獲去真實動態參數。相比前人在此科研方向上的小波分析,尋找最合適的小波基與分解層數進行后期數據處理,對測試人員的基本素養要求較高,此方案更具有實時性,有效降低測試時間與經濟成本,在零點漂移產生原因的根源處的信號源頭解決此類問題。經過理論分析、試驗驗證以及靶場實彈試驗證明,此方案確實可行,能滿足測量常規炮彈侵徹過程高過載連續動態特性的測量,對研究這類工程問題的人員實現對測量電路改進具有指導意義。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
