雙軸高精度太陽能自適應跟蹤系統研究與設計
2022-03-30 03:36:10趙繼忠
電源技術 2022年3期
關鍵詞:系統
吳 碩,趙繼忠
(1.遼寧開放大學,遼寧沈陽 110034;2.遼寧裝備制造職業技術學院,遼寧沈陽 110161)
隨著全球環境污染問題日益加重,不可再生能源逐漸枯竭,太陽能作為一種新能源,已廣泛應用于發電、供暖、集熱等人類生產生活中。然而,太陽能受地理位置、氣候條件、季節變換等因素影響,制約了其開發和利用。太陽能跟蹤采集是其開發利用的關鍵技術,也是國內外諸多學者長期研究的課題。
文獻[1]設計了一種大范圍光電跟蹤傳感器,建立了粗跟蹤模塊、精跟蹤模塊和主控模塊,有效提升了跟蹤系統效率。文獻[2]設計了PLC 雙軸控制系統,利用太陽位置算法,對太陽能進行自動跟蹤,提高了太陽能利用率。文獻[3]將光電跟蹤和視日跟蹤進行有效結合,設計開發了一種高精度太陽能伺服閉環跟蹤系統,從而將跟蹤控制精度控制在0.1%。文獻[4]提出了一種開環和閉環混合的跟蹤策略的控制系統,探討了一種低成本機械結構跟蹤裝置的算法。
因此通過上述相關文獻梳理總結,我們發現,目前太陽能跟蹤采集技術主要包括:
(1)光電跟蹤:通過光電(圖像)傳感器檢測太陽光變化,經過主控系統判斷計算后,通過執行機構實時跟蹤,屬于閉環實時跟蹤。但其受天氣影響較大,局部陰影時,無法對太陽位置進行有效校正。
(2)視日跟蹤:通過太陽位置算法,計算出跟蹤裝置高度角和方位角,通過執行機構調整到相應的方位,實施全天候跟蹤,屬于開環控制。從機械結構旋轉自由度可分為單軸、極軸、雙軸控制。然而,太陽能軌跡算法受季節和時間變化,程序執行中容易產生積累誤差,需要精確的地理位置和準確時間來源。
(3)光電跟蹤和視日跟蹤混合。此種跟蹤方式可以將前兩者進行優勢互補,但控制系統復雜度較高,成本提升。
針對文獻提出的跟蹤方案的特點,基于進一步提高、改進跟蹤系統的精度,文章提出了一種基于閉環控制光電(圖像)跟蹤和開環控制視日(日歷)跟蹤混合跟蹤策略,設計以DSP+PLC 為核心的主控系統,搭建相應實驗平臺,采用太陽位置跟蹤和改進圖像處理算法,實時調整碟架機構位置,以此驗證、探討跟蹤系統的穩定性和精度。
1 系統總體結構設計
1.1 機械結構設計
考慮到本系統對太陽聚光性有較高的要求,系統采用斯特林碟架結構設計,如圖1 所示。其主要包括:反射鏡面、鏡面支撐、吊臂、基座、光電轉換裝置、驅動裝置等[5]。同時,由于太陽在天空中的高度和方位是不斷變化的,太陽光線達到地球時會產生兩個不同的角度,即方位角和高度角。因此,需要采用雙軸結構對太陽的方位角和高度角進行實時跟蹤,以此到達最佳聚光效應。
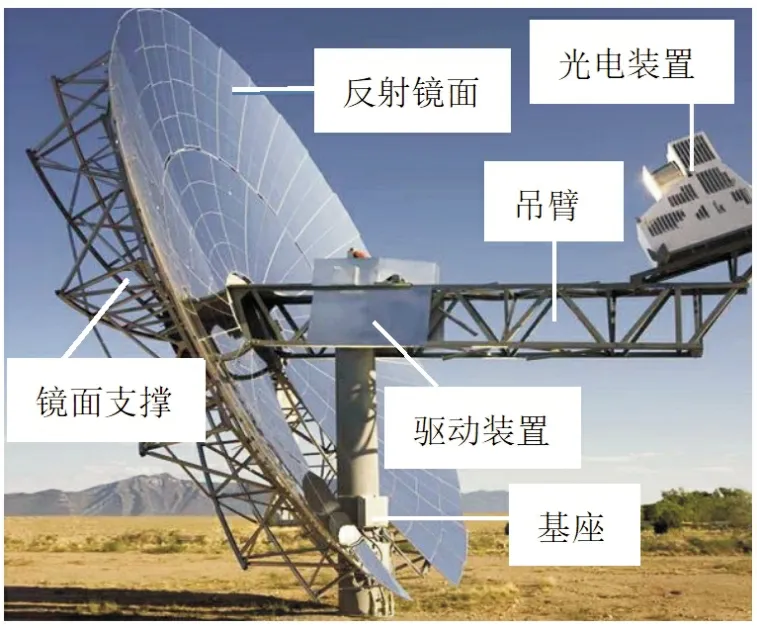
圖1 斯特林碟架結構
1.2 跟蹤原理
本系統采用開環和閉環相結合的跟蹤策略對太陽能進行實時采集跟蹤,其控制系統原理設計如圖2 所示。

圖2 系統原理組成
其工作過程分兩部分:
(1)粗跟蹤部分:通過外部GPS 模塊自動獲取系統裝置的經緯度和時間信息,然后通過串口將信息發送至PLC,并調用太陽位置算法(SPA)功能塊,得出當前太陽方位角和高度角位置信息,并完成碟架機構調整。
(2)精跟蹤部分:利用圖像處理傳感器采集太陽光斑圖像,然后通過DSP 圖像處理算法得出太陽位置相對于太陽光斑質心的偏轉角度,并由DSP 轉換成方位角和高度角信息傳遞到PLC,實施碟架位置精確調整。
2 硬件結構設計
控制系統以PLC 和DSP 為控制核心,由視日跟蹤、光電跟蹤、電機驅動模塊、上位機監控模塊組成,硬件設計連接如圖3 所示。后文將對硬件結構各功能模塊設計進行具體介紹。
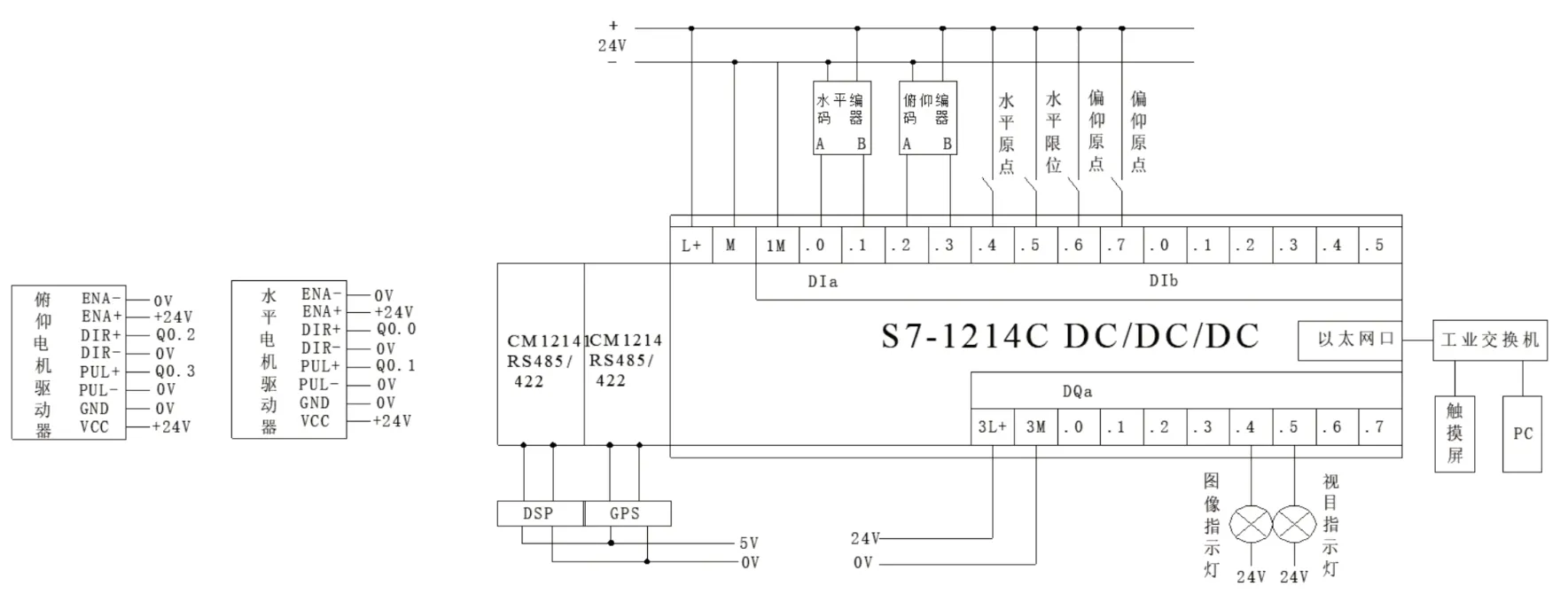
圖3 硬件結構設計
2.1 視日跟蹤模塊
該模塊主要功能是通過GPS 串口信息發送至PLC 調用太陽位置算法,并根據圖像處理計算最終結果,驅動步進電機轉動碟加到太陽光最佳采集位置。
(1)GPS 接收器:接收器NAVILOCK NL-403P 支持NMEA0183 協議,可以輸出當地日歷時間、經緯度、海拔天氣等信息,通過RS232 串口信息發送至PLC。
(2)PLC 控制器:采用西門子S7-1214C,DC/DC/DC 型號PLC,其內部集成14 點輸入、10 點輸出、1 個以太網通信端口、4 路脈沖輸出、6 路高數計算器,自帶SPA_CALC_SUN_vector功能塊,方便計算太陽位置信息。同時,考慮到PLC 與GPS和DSP 串行通訊,需擴展CM1241 232 通訊模塊。
2.2 光電跟蹤模塊
光電跟蹤模塊是控制系統提高跟蹤精度的關鍵所在,主要由圖像傳感器和DSP 構成。該模塊放置在一個密閉并遮光的長方體盒子內,太陽光入射至盒頂部切開的圓孔,并在其下面的透明板上形成一個太陽光斑。光斑被盒子底面放置的圖像傳感器和DSP 構成的光電模組獲取并處理,以此完成太陽位置跟蹤。
由于太陽光斑移動緩慢,對圖像傳感器采集精度要求不高,因此考慮成本等因素,本文采用以CMOS 圖像傳感器為核心的OV7620 攝像頭模組,利用其SCCB 總線,完成取窗口、白平衡等初始化工作。
圖像傳感器拍攝的圖像通過DSP 進行運算和處理,硬件連接圖如圖4 所示。由于圖像采集處理模塊僅對灰度圖像進行處理,數據輸出僅僅采集OV7620 的Y0-Y7 亮度數據。因此,我們采用TMS320VC5416 DSP 便可符合要求。
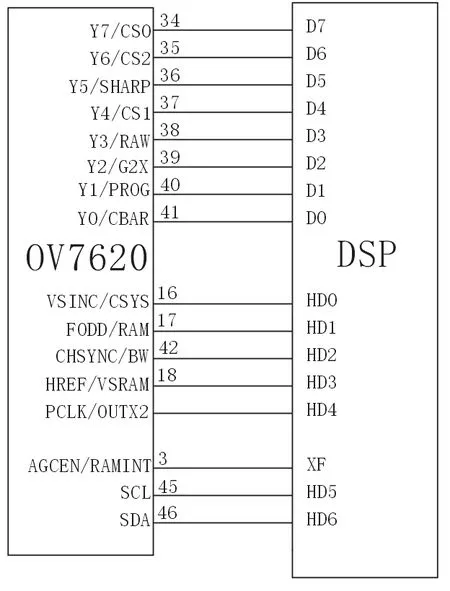
圖4 圖像采集電路圖
2.3 電機驅動模塊
該模塊主要完成斯特林碟架水平和俯仰兩個方向的位置控制。其中,位置控制包括粗跟蹤和精跟蹤環節中PLC 對步進電機的控制。
(1)步進電機及其驅動裝置:PLC 將高度角、方位角信息轉換成脈沖發送給步進電機帶動軸的轉動,因此其無法與PLC 直接連接,需要配置相應的驅動器。根據工藝要求,本系統采用西門子M542 步進驅動器予以驅動控制,1 600脈沖/轉,8 細分。
(2)旋轉編碼器:控制系統需通過旋轉編碼器對碟架轉動位置予以判定、校正。因此,采用歐姆龍E6B2—CWZ5B 增量式編碼器接至PLC 輸入口,通過PLC 內部的高速計數器對脈沖計數,反饋碟架自身位置信息,進行方向、位置校正。
2.4 上位機監控模塊組成
為便于工業現場操作,系統除配置啟動、停止、正反/上下等機械按鈕控制外,還設置上位機觸摸屏監控模塊。觸摸屏配置選用MCGS 公司的TPC1061TD 工業觸摸屏對跟蹤系統實時運行情況予以監控,該屏內置1 個以太網和1 個RS485/232 接口,可以與PLC 進行PROFINET 網絡通訊。
3 系統軟件結構設計
3.1 主程序設計
系統主程序工作流程為:系統開始初始化,首先調用太陽位置算法,實現粗跟蹤。然后,進入圖像處理環節,判定太陽光斑所處位置是否處于傳感器視場范圍內,如在范圍內,調用圖像處理算法,通過DSP 計算太陽方位偏轉角,反饋給PLC 進行步進電機位置閉環控制。如不在范圍內,返回粗跟蹤環節(視日跟蹤),最后,待系統執行一個周期后,結束運行。其工作流程如圖5 所示。
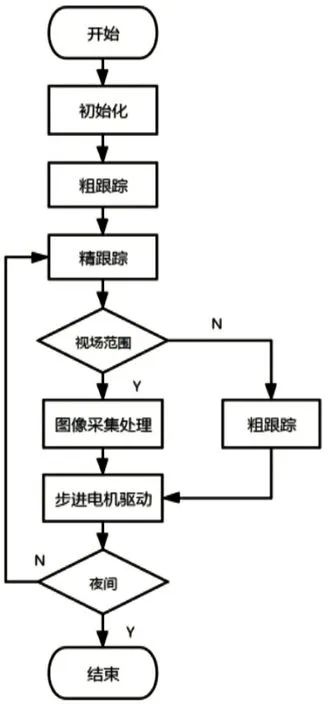
圖5 主程序流程圖
3.2 視日跟蹤程序設計
(1)GPS 與PLC 通訊
PLC 對GPS 發送的ASCII 碼進行解析和解碼,并按照一定周期獲取基本定位數據。在編程調試時,PLC 通訊口波特率設置4 800、無奇偶校驗、8 位數據位、1 位停止位。我們通過TIA PORTAL 全局庫下載GPS 通訊功能塊,簡單編程,便可讀取相關經緯度信息,如圖6 所示。

圖6 GPS 功能塊調用
(2)太陽位置與電機控制程序設計
通過TIA PORTAL 軟件調出太陽位置算法和軸工藝對象功能塊,計算出太陽高度角和方位角,并轉換成脈沖。利用PLC 內置高速計數器對編碼器脈沖計數,并比較高度角和方位角變化值,驅動電機轉動,其工作流程圖如圖7 所示。如若編碼器反饋來的脈沖數與PLC 計算的高度角和方位角相等,則說明碟架調整完畢。否則,還需進一步校正、調整碟架。
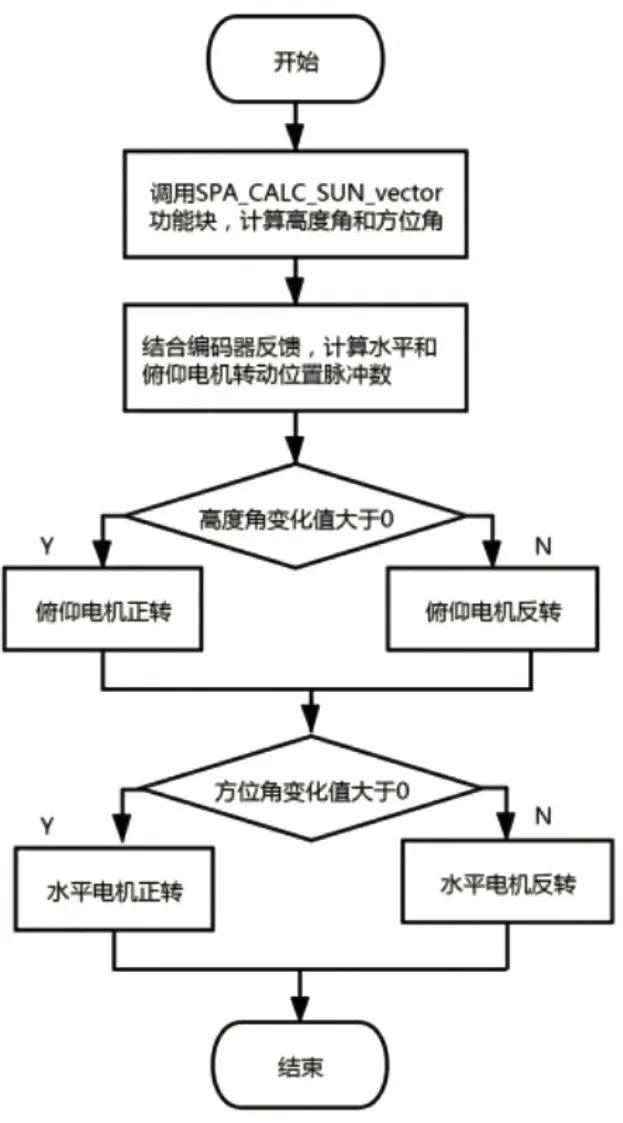
圖7 視日跟蹤流程圖
3.3 圖像采集與處理程序設計
攝像頭采集太陽圖像后,發送至DSP 進行太陽光斑位置的運算處理。其中,DSP 處理程序算法包括:圖像光斑處理、太陽質心獲取和坐標轉換三部分。圖8 為圖像采集與處理流程圖。
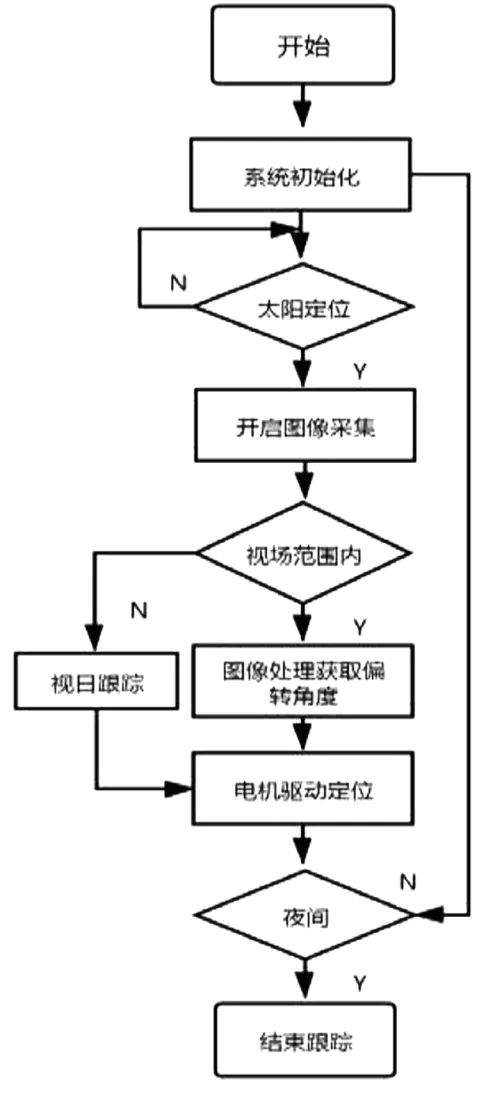
圖8 圖像跟蹤流程圖
如果太陽質心在視場范圍內,首先采用二值化算法后,分離光斑。然后通過二進制跟蹤質心算法,采集到圖像最大灰度值點位置[6],并通過坐標轉換算法得到太陽光斑水平和垂直的偏轉角度。最后,通過DSP 串口發送至PLC,PLC 內部通過PID 控制計算出相應的偏差校正脈沖量,進而實現對太陽位置的精跟蹤。如果太陽質心由于陰天或被遮擋時不在視場范圍內,則轉入視日跟蹤模式。
4 實驗結果與分析
4.1 觸摸屏畫面測試
本實驗安排在遼寧沈陽郊區某太陽能光伏實驗基地完成,通過采集2020 年11 月14 日實驗相關數據,測試跟蹤系統硬、軟件指標是否達到技術要求,系統上位機監控畫面如圖9所示。

圖9 觸摸屏畫面測試
我們可以看出,觸摸屏畫面能夠正確實時顯示跟蹤系統的各種信息,可以進行本地/遠程、手動/自動操作,也可在圖像跟蹤/日歷跟蹤系統切換。
4.2 碟架運行測試
在手動調整碟架位置時,考慮到兩軸減速機齒輪比不同,俯仰電機速度設定為2 000 r/min,水平電機速度設定為1 500 r/min,電機運行過程穩定,無卡頓現象。但在系統自動回原點過程中,偶發“卡頓”、“停機”現象,主要是由于電機回原點速度過低造成的,在TIA PORTAL 分別將回原點加速度提高至25 和20 mm/s2,卡頓停機現象消除。
4.3 跟蹤精度測試
整個跟蹤系統運行時首先采用視日跟蹤方式通過太陽位置計算出太陽相應高度角和方位角,然后通過執行機構位置調整,達到跟蹤目的。因此實驗選取11 月14 日10 點、11點、12 點三個時間段進行跟蹤觀察,測試時間段多云晴朗,如圖10 所示。結果表明:太陽光斑準確地聚焦在跟蹤區域內,可以實現烏云無太陽條件下粗跟蹤需求。
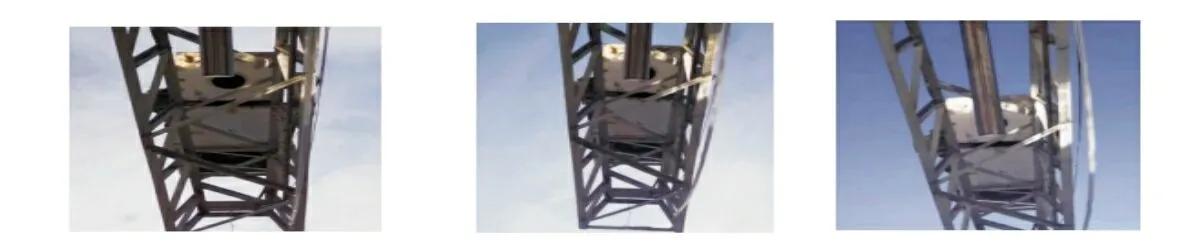
圖10 不同時間段內視日跟蹤系統效果
視日跟蹤完畢后進入圖像跟蹤環節。實驗同樣選取上述時間段進行圖像比較分析,如圖11 所示。結果表明:太陽光斑能及時聚焦在碟架光腔中心位置。同時,當天空有烏云或遮擋時,自適應調整換到視日跟蹤。

圖11 不同時間段內圖像跟蹤系統效果
最后,為檢測跟蹤系統的平均精度,隨機選取2020 年11月14 日上位機導出的數據信息,如表1 所示。通過對數據比較分析可得:視日跟蹤平均精度可達±0.03°,圖像跟蹤平均精度可達±0.02°。

表1 監控數據信息 (°)
5 結論
研究設計了一種基于PLC 位置控制和DSP 圖像處理的雙軸太陽能自動跟蹤系統。該系統采用太陽位置和圖像改進算法相結合的控制策略,利用西門子TIA PORTAL 工業自動化集成控制軟件實現了跟蹤系統閉環和開環控制的有機銜接。實驗數據表明:跟蹤系統整體平均精度可達±0.03°,滿足工業生產要求。但需要指出的是,系統數據是基于機械裝置和天氣狀態均良好的條件下采集完成的,如考慮極端天氣和設備老化情況,實際跟蹤效果和理論數據還有一定差距,系統硬件設備和算法還需進一步改進。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
