核電工程BIM一體化測量技術研究及應用
2022-03-31 01:21:34屈璐
中國核電 2022年6期
屈 璐
(中國核工業二四建設有限公司,福建 漳州 363000)
核電工程具有建筑規模龐大、施工周期長、工藝及結構復雜、安裝物項精度要求高等特點,目前核電工程測量依舊沿用傳統的測量技術,存在工作效率低、勞動強度高、信息化程度低、過度依賴操作人員經驗及技能水平、容易受施工環境影響等現象,一定程度制約著核電工程土建施工技術的提升,難以滿足現階段核電工程施工需求。為了滿足核電工程的高標準、嚴要求,工程測量技術需不斷改進創新,在保證安全與質量的前提下提高工效。通過將BIM技術與GPS RTK測量技術、全站儀ATR自動瞄準技術相融合,并設計開發與之匹配的測量數據處理系統,制定先進科學的工藝流程,實現BIM一體化測量技術,該技術自動化、信息化程度高,極大的降低了施工測量勞動強度、人員數量以及對操作技能水平的依賴,提高了外業測量效率、內業數據處理效率,可快速完成復雜建筑現場儀器架設及施工測量,受施工環境制約影響小,并保證施工安全與質量。
1 BIM一體化測量技術實施難點
1.1 BIM與測量結合運用方面
核電工程測量主要基于藍圖進行現場定位放樣,藍圖轉化通常采用2D模式繪圖,即CAD二次繪制藍圖,結合圖紙建筑坐標系提取各施工物項設計控制坐標點,通過全站儀進行現場軸線定位放樣或者安裝調測。由于核電工程建筑結構復雜、工程量龐大、高精度安裝物項多,傳統方式不易發現存在定位物項沖突的情況,事前控制難度較大。基于BIM三維建筑模型在施工現場完成自動化的定位放樣和檢測,突破傳統的2D、圖紙化作業的方式,實現3D直觀測量模式,不僅能提高作業效率與精度,而且大大降低傳統測量方式人為操作錯誤風險,對人員操作技能水平依賴程度低。
1.2 GPS RTK技術與全站儀測量技術融合方面
核電建筑土建施工階段測量工程量主要分為三個項目,即:定位放樣、安裝調測、地形測量,分別占測量總工程量70%、20%、10%。地形測量一般在室外,受施工環境影響小,定位放樣與安裝調測本層施工大部分情況下在建筑物上層樓板或屋面施工前完成,只有大約不到20%的設備基礎、孔洞在完全封閉后施工。采用傳統的全站儀極坐標法[3]測量,需要提前引入基準點,并保證基準點間測量通視,往往會受到現場施工環境的制約,設站定向不靈活。若采用傳統GPS RTK模式,又會存在坐標精度不足的問題,不滿足現場施工要求。通過建立GPS基準站系統(簡稱CORS),提高GPS RTK載波相位差分精度,采用專業測量設備及配套軟件將全站儀與GPS接收機或電臺手柄相連接,通過測量電子手簿控制。使用時可將BIM建筑模型進行匹配、轉化后直接導入電子手簿,可直接顯示三維圖形,根據任務需要在電子手簿中選取測量點位獲取設計數據,通過電子手簿控制全站儀完成自動化定位放樣工作,根據現場環境可選用“基準模式”和“任意模式”。
1.3 測量數據信息化處理方面
傳統測量資料編制,都需要現場人工記錄原始測量數據,現場作業完畢后,采用人工錄入的方式編制測量資料,一方面內業作業效率低容易出錯;另一方面內外業不同步,無法第一時間向監理單位報送正式資料,往往存在1天左右的間隔。通過結合BIM一體化測量技術開發數據生成系統,將全站儀、GPS、電子水準儀現場采集的測量數據直接通過軟件實現依據不同的資料模板,自動化生成標準資料,改變傳統人工編制資料的模式,降低人工編制資料工作量,杜絕人工錄入錯誤造成資料退回,引起制約現場施工的情況,提升內業資料工作效率與質量。
2 BIM一體化測量技術運用
2.1 作業前技術準備
實施前技術準備包括:單基站CORS建立、BIM建筑模型繪制、測量主要儀器及設備檢校、BIM建筑模型與儀器設備的加載、匹配、轉化。
2.1.1 單基站CORS建立
首先建立CORS系統,提高GPS RTK載波相位差分精度和數據穩定性[1]。考慮到建筑規模,一般在半徑5 km范圍場地采用單基站CORS,5 km范圍內數據解算精度可始終保持在3 mm以內,5~10 km開始精度衰減,此時對精密工程不再適用,超過10 km后精度衰減至1 cm,只能用于地形測量。單基站CORS布局靈活、結構簡單、即建即用一次安裝調試完畢后,可連續運行10年以上,期間在使用過程中根據解算精度的變化每隔2~3年進行一次校正即可。
該環節重點在于調試,核電工程單基站CORS基站點的平面位置按照B級GPS精度、高程按二等水準精度要求施測[4]。平面坐標系統與高程系統根據工程設計要求選用一次建立完成,平面控制采用GPS靜態測量邊連式構網,使用3臺GPS接收機同步觀測兩個時段聯測至少4個以上次級控制網基準點,[5]高程控制利用至少3個以上次級控制網點起算。在測量過程中基準站和流動站GPS接收機接收衛星數量均不小于5顆,且獲得初始化定位時方可進行測量,測量數據均在固定解狀態下,并且測量置信度為99.9%,為保證測量精度,聯測時每個點位觀測不少于3 min,結果采用三維無約束平差確定建立單基站網絡RTK模型。
2.1.2 BIM建筑模型的繪制
BIM建筑模型的深度和細化要求必須要滿足測量定位放樣,建筑結構內各施工物項必須與設計圖紙一致,包括數量、尺寸、精度,這是實現無藍圖實時測量的基礎。需要測量技術員與BIM工作小組成員進行溝通交流,明確需求和目的,或者由專業測量技術人員對初版的BIM建筑模型進行深化補充。
繪制的BIM建筑模型無需考慮坐標系問題,只需根據設計圖紙的各物項相對位置關系繪制即可,在具體使用時進行坐標系的匹配和轉化。
2.1.3 測量主要儀器及設備檢校
所用全站儀必須得到國家相關檢定機構檢定,并獲得檢定合格證書。每隔3個月按照說明書進行常規“三軸誤差”檢校工作, 所使用的GPS接收機及手簿必須得到國家相關檢定機構檢定,并獲得檢定合格證書。[2]每隔3個月按照說明書進行常規信號連接、系統穩定性、解算參數的檢查、校正。
2.1.4 BIM建筑模型與儀器設備的加載、匹配、轉化
BIM建筑模型通常采用相對關系繪制,并且繪制屬性為塊,不具備坐標性質和端點、節點實時捕捉性質,導致電子手簿無法識別,故此需要對BIM建筑模型進行處理,滿足使用要求。
(1)圖形屬性變更
BIM圖形屬性變更需要采用CAD2010及以上版本進行處理具體,工作流程為:圖形導入→圖形分解→圖形另存。
圖形導入:圖形導入CAD后切換三維視圖模式檢查是否存在數據丟失情況,必須保證圖形的完整性。
圖形分解:將三維圖形全選后,采用分解選項將三維圖形的塊屬性變更為點、線、面屬性,分解后還需在圖形特性中進行檢查是否全部分解完畢,否則在后續導入電子手簿使用時,將無法選中端點坐標進行定位放樣。
圖形另存:圖形分解后另存為DXF格式,另存名稱不能出現中文,只能采用數字或英文模式,否則在導入時將無法識別圖形文件。
(2)坐標系匹配
由于建筑模型為相對尺寸,不具備絕對位置的坐標系功能,此時需要對完成分解的三維模型進行自定義坐標系,并修正方位角。以設計圖紙中的建筑坐標系設置自定義圓點,并將設計圖紙中的施工角度換算為測量方位角,完成三維模型的平移、旋轉、匹配,完成后對圖形中各節點進行坐標檢查,確定數據正確無誤。需要注意的是,在轉化時檢查三維圖形的繪制單位,按照原圖的繪制單位進行自定義坐標系。
(3)圖形加載
將校正后圖形DXF文件導入電子手簿,導入時可通過SD卡、U盤、藍牙多種方式,通過制定的專業軟件實現一鍵式加載,可在電子手簿中直接進行圖形3D瀏覽,任意選擇建筑物項坐標進行現場定位放樣工作。生成電子手簿3D模型界面如圖1所示。
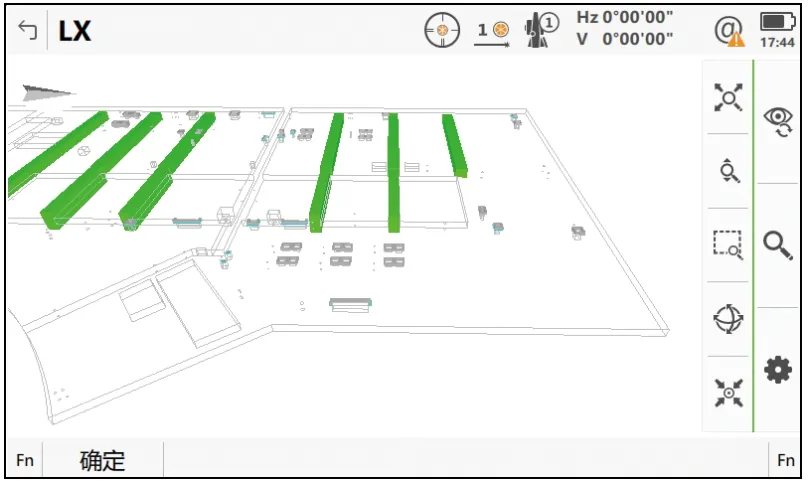
圖1 電子手簿3D模型界面Fig.1 Electronic hand thin 3D model interface
2.2 外業測量
定位放樣與安裝調測項目根據現場施工環境,可選用基準模式或任意模式。地形測量可直接采用GPS RTK基于CORS站進行地形測量。
2.2.1 基準模式
作業步驟:設備連接→新建項目→參數設置→設站定向→定位放樣(或者安裝調測)。
設備連接:首先智能全站儀與電臺手柄連接,然后將電子手簿采用長距離TS信號與全站儀連接,實現實時通訊與控制,此時全站儀將無需人員操作,只需用電子手簿控制。
新建項目:根據工作任務新建工作項目,將技術準備階段的BIM圖形保存在新建項目中,此時需注意新建項目的坐標單位同BIM圖形坐標單位一致。啟動基于BIN的智能施工放樣軟件,進入任務后可直接顯示放樣的BIM模型。
參數設置:直接通過電子手簿設置全站儀測量參數:目標、定位放樣限差、導向光模式、導向光功率、溫度、氣壓等基本常數。
設站定向:在測站處根據通視條件與基準點位置選擇后方交會法設站或已知點設站。
后方交會法設站屬于任意點設站,現場使用靈活方便,當無法在已知基準點上架設全站儀時采用。已知點設站屬于基礎方法,必須在已知基準點架設全站儀。必須滿足已知基準點間通視要求。根據現場環境由作業人員選用設站。
定位放樣:當設站完成后,此時電子手簿中的三維圖形會顯示全站儀的位置,電子手簿與360°棱鏡安置在同一根對中桿上,通過電子手簿可在三維圖形中選取需要定位放樣的點位,當選擇棱鏡模式后,全站儀將自動旋轉到正確坐標的方向上,此時移動棱鏡到全站儀指向的方位,全站儀自動開啟搜索模式,并鎖定棱鏡,同時在電子手簿上顯示此時棱鏡相對于定位放樣點理論坐標的位置關系,根據向前、向右、向上的提示移動棱鏡到限差容許的位置,完成該定位放樣點的工作并記錄保存實測坐標點。隨后采取同樣的方式完成其他點位的定位放樣工作。當選擇激光模式后定位放樣,選取設計點位后,全站儀鏡頭會自動旋轉到設計坐標位置,同時會發射可見激光,移動棱鏡到激光位置,即可完成對該設計點位的定位放樣工作并保存數據,隨后完成其他定位放樣工作,如圖2所示。
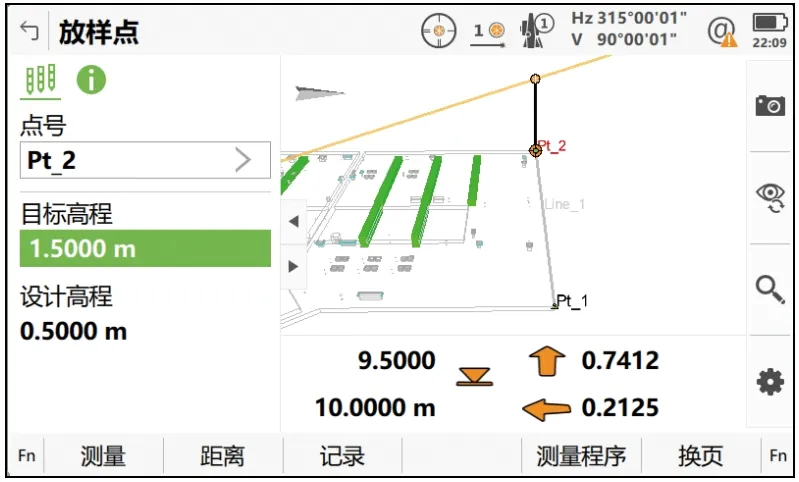
圖2 電子手簿3D模型界面圖Fig.2 Electronic hand thin 3D model interface diagram
安裝調測:以核電工程安裝調測工程量最大的鋼襯里貫穿件為例,其他物項調測方式方法與思路與此一致。設站完畢后,手簿中會顯示全站儀與貫穿件的位置,電子手簿不與棱鏡桿相連,360°棱鏡與調測專用的小棱鏡桿相連,將其安置在貫穿件分出的中心點。作業人員站在需調測的貫穿件一旁,手持電子手簿,在三維圖形中選取該貫穿件設計坐標點,全站儀將自動旋轉到正確坐標的方向上,全站儀自動開啟搜索模式,并鎖定棱鏡,同時在電子手簿上顯示此時棱鏡相對于定位放樣點理論坐標的位置關系,手動開啟實時跟蹤測量,根據電子手簿中顯示向前、向右、向上的提示距離,告知安裝人員調整貫穿件位置。待貫穿件調整完畢后,記錄保存最終調測合格后的數據,如圖3所示。
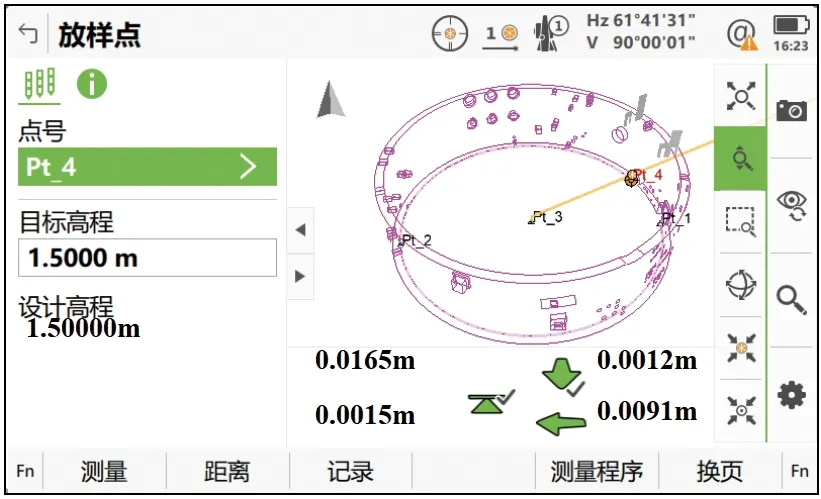
圖3 電子手簿中貫穿件位置調整模型距離圖Fig.3 Model distance diagram for the position adjustment of penetrators in electronic hand book
2.2.2 任意模式
任意模式與基準模式根本的區別在于無需設站,可在現場非封閉環境的測量區域進行任意架站,充分運用COSR站的高精度,使全站儀在任意位置都可自動獲取設站基點,使用更加靈活。
全站儀在測區任意位置進行架設儀器,無需任何基準點。電子手簿進入設站界面,將GS模式切換為GPS模式進行坐標快速采集,分別在測區任意采集3~4個點的GPS數據,而且這些點是任意點,無需標記點位,每次測量一個GPS點后,即可通過電子手簿快速搜索全站儀(可以利用超級搜索首先尋找棱鏡,再利用搜索并跟蹤功能鎖定棱鏡)并遠程控制全站儀對360°棱鏡進行觀測,用于獲取后方交會的距離和角度。通過GPS在測區采集的任意點,同時通過全站儀快速測量棱鏡,獲取數據參數后,即可計算出全站儀的架站坐標和方位角,快速完成復雜建筑現場的全站儀架設,而且是任意點,無需考慮現場的堆積物,只要找到空地即可架站。
基準模式適用于已提前引入基準點的各類施工環境,尤其是在地下室、建筑物內等GPS信號弱的封閉環境。而任意模式是在基準模式的基礎上進行了改進,特別適用于非封閉環境、缺少基準點或基準點被破壞、GPS信號良好等場景。
2.2.3 內業資料編制
內業資料編制工作是通過用于配套BIM一體化測量技術開發的數據生成軟件實現,主要目的是將全站儀、GPS、電子水準儀現場采集的測量數據,直接通過軟件實現依據不同的資料模板,自動化生成標準資料。改變了傳統人工現場記錄原始數據,編制時人工比照原始數據錄入的模式,更加簡單快捷。并且通過自定義網絡傳輸,可實現緊急施工現場定位放樣與資料編制同步進行。測量的同時,保存在儀器中的數據通過自定義的網絡傳輸上傳至軟件,現場測量任務完成的那一刻,數據同時已全部上傳完畢并生成標準資料,實現內外業真正意義上的同步。
3 結論
核電工程一體化測量技術,將BIM與智能型全站儀集成應用,通過對軟件、硬件系統性整合,結合核電實際工況進行適應性優化和匹配,將BIM模型代入施工現場,利用模型中的三維空間坐標數據驅動全站儀進行測量,真正實現無縫的數據流,實現快速控制、放樣、資料生成一體化,改變了傳統的極坐標法定位放樣模式,可適應更加復雜的現場環境,保證施工測量質量,縮短了施工工期,為類似后續核電廠工程測量提供了參考樣板。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
北京測繪(2020年12期)2020-12-29 01:37:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(2019年3期)2019-10-10 01:40:18
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
光學精密工程(2016年6期)2016-11-07 09:07:19
電測與儀表(2016年9期)2016-04-12 00:29:52