桂林地區暴雨天氣下兩種對流層模型的適用性分析
2022-04-05 12:58:26黃東桂劉立龍黃良珂謝劭峰莫智翔
桂林理工大學學報 2022年3期
關鍵詞:模型
黃東桂, 劉立龍, 黃良珂, 謝劭峰, 莫智翔
(桂林理工大學 a.測繪地理信息學院; b.廣西空間信息與測繪重點實驗室, 廣西 桂林 541006)
0 引 言
對流層延遲是影響GNSS高精度導航定位的誤差源之一[1]。鑒于對流層延遲誤差的改正在空間大地測量、 InSAR等應用中的重要性, 國內外學者致力于對流層延遲精細建模的研究, 該模型可分為基于實測氣象參數的對流層延遲模型和對流層延遲經驗模型。目前傳統的基于實測氣象參數對流層延遲模型有Saastamoninen、 Hopfield和Black等[2-4], 該類模型在采用實測氣象數據時能取得較好的精度, 但在采用標準大氣時其精度較差。相比于依賴實測氣象參數的對流層延遲模型, 對流層延遲經驗模型具有使用簡單方便的特點, 如EGNOS模型和UNB系列模型等[5-6], 其中UNB系列模型被應用于美國廣域增強系統。上述模型雖能獲得相應對流層延遲信息, 但模型穩定性還有待進一步提升。
為進一步滿足GNSS用戶實時定位導航的ZTD(zenith total delay)改正需求, 諸多學者構建了豐富的區域性和全球性對流層延遲經驗模型[7-9]; B?hm等[10]通過對GPT2模型進行改進, 建立了全球區域的GPT2w模型, 該模型目前是最先進的對流層延遲模型之一; 文獻[11]基于全球大地測量觀測系統(global geodetic observing system, GGOS)資料構建一種基于球諧函數的全球非氣象參數GZTD模型, 該模型表現出較好的對流層修正效果; 文獻[12]基于ERAInterim再分析資料構建了具有精度穩定等優點的SHAO-H對流層延遲經驗模型。
GPT2w和UNB3m作為常用的全球對流層延遲經驗模型, 具有使用簡便、 適用范圍廣等優點, 諸多文獻研究表明, 兩者的模型精度在各區域具有較好的穩定性[13-17], 但在暴雨下模型精度的評估卻罕有文獻提及, 且相關研究表明暴雨的發生會伴隨著ZTD劇烈變化[18], GPT2w模型與UNB3m模型在構建時并未顧及到該類情況, 導致模型存在一定的系統偏差。為此, 本文以GAMIT/GLOBK解算桂林地區CORS基準站的ZTD產品為參考值, 評估桂林地區暴雨天氣下對流層延遲模型的適用性, 以期為桂林地區暴雨天氣下GNSS的應用提供相應的參考。
1 GPT2w和UNB3m模型和精度評定方法
1.1 GPT2w模型
GPT2w對流層延遲經驗模型是由B?hm等基于ERA-Interim再分析資料對GPT2模型進行改進構建的。該模型輸入儒略日、 測站經緯度及高程等信息即可得到1°×1°或5°×5°水平格網分辨率的地表氣壓(P)、 加權平均溫度(Tm)、 水氣壓(es)等氣象參數[10]。由于GPT2w模型只提供上述氣象參數, 其計算對流層總延遲時需結合Saastamoinen模型計算的天頂靜力學延遲(ZHD)和Askne模型[19]計算的天頂濕延遲(ZWD), 方可得到GPT2w模型計算的ZTD。Saastamoinen模型的表達式為
ZHD=2.276 8P/(1-0.002 6 cos 2φ-0.000 28H),
(1)
式中:P為測站地表壓強(hPa);φ為緯度(rad);H為測站高程(km)。
Askne天頂濕延遲模型表達式為

(2)
式中:k2′=16.52 K/mbar;k3=(0.778±0.004)×105K2/mbar;Tm為加權平均溫度;Rd為干氣體常數;λ為水汽遞減因子;gm為重力常數;es為水氣壓。
GPT2w模型計算ZTD的表達式為
ZTD=ZWD+ZHD。
(3)
1.2 UNB3m模型
UNB3m模型是由加拿大New Brunwick大學將Saastamoinen天頂延遲和Niell投影函數、 氣象參數年均值以及振幅表構建的條帶模型, 它將美國標準大氣資料沿著緯度進行條帶化, 得到一個以15°間隔的大氣參數表用以估算關鍵氣象參數, 通過輸入年積日、 測站緯度、 高程等信息即可得到測站所在位置相應的溫度、 壓強、 水汽壓、 溫度梯度(β)、 水汽梯度(即水汽遞減因子λ)氣象參數, 其中氣象參數年均值表和振幅表等信息可參考文獻[6]。
UNB3m模型計算ZHD和ZWD的表達式為
(4)
(5)
(6)
λ′=λ+1。
(7)
其中,g為地表的重力加速度。結合式(3)得到UNB3m模型計算的ZTD。表1為GPT2w和UNB3對比, 其中dT為溫度遞減率, 其他參數同前文。

表1 GPT2w模型和UNB3m模型對比
1.3 模型的精度評估方法
模型的評定以ZTD為參考值(真值), 模型計算的ZTD為估計值, 以偏差(BIAS)及均方根誤差(RMS)兩種精度指標檢驗模型的精度:
(6)
(7)

2 GPT2w和UNB3m的適用性分析
2.1 數據來源及處理策略
本文使用GAMIT/GLOBK, 選取桂林地區內的8個CORS站為非固定站, 以BJFS、 CHAN、 SHAO、 LHAZ、 TWTF和URUM為固定站參與聯合解算, 得到2017年6—7月的ZTD產品(時間分辨率為1 h)作為參考值用以評估對流層延遲模型在暴雨天氣下桂林地區的適用性。圖1為桂林地區8個CORS基準站的分布圖。
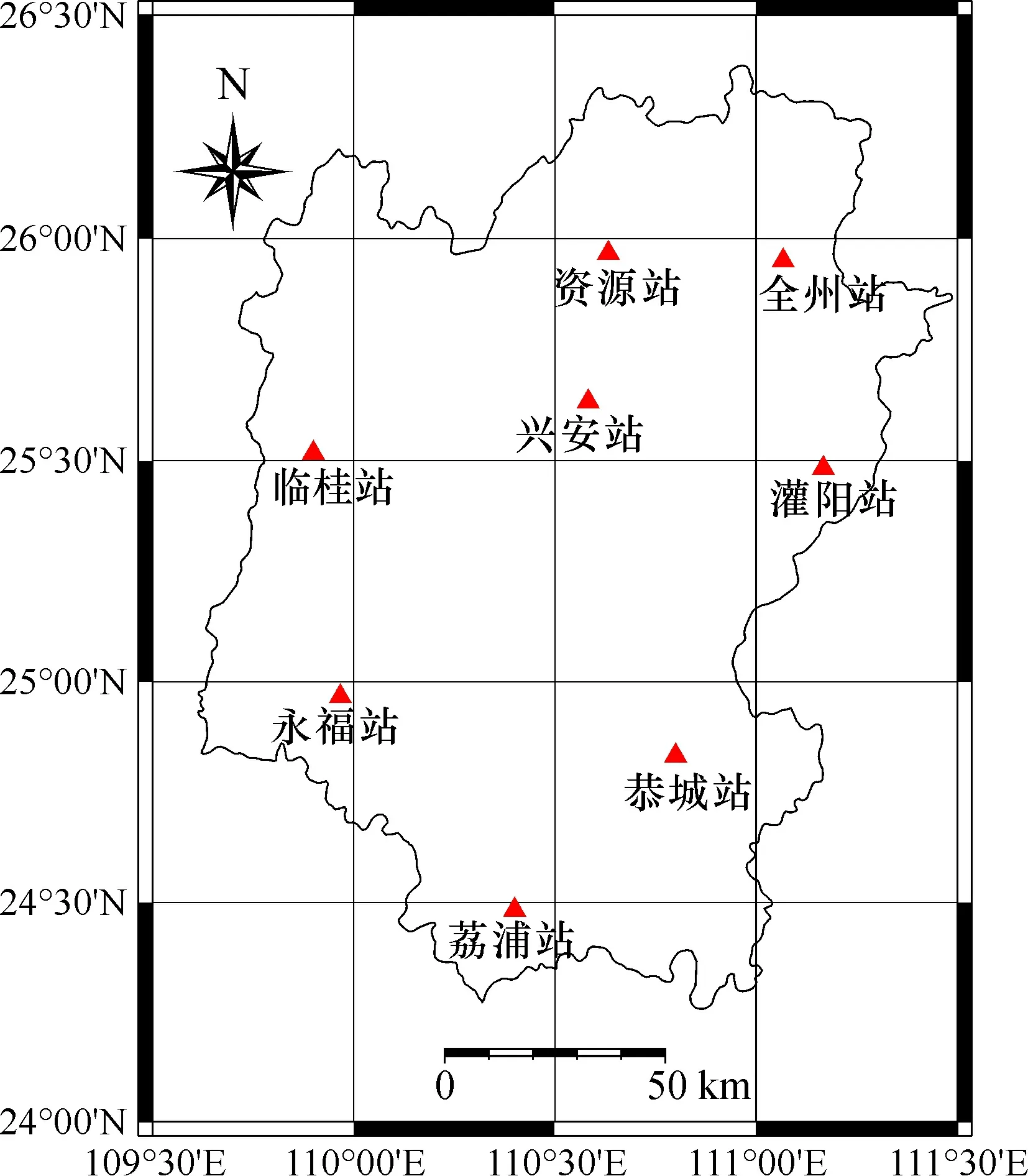
圖1 桂林8個CORS基準站點位分布圖
2.2 數據源精度評估
為了驗證采用GAMIT/GLOBK解算得到的2017年6—7月桂林CORS基準站的ZTD精度, 選取該時間段內IGS站(BJFS、 TWTF)提供的ZTD作為參考值(記為ZTDIGS), 與參與桂林CORS基準站解算的BJFS、 TWTF站得到的ZTD值(記為ZTDCORS)相比較, 把大于3倍中誤差的偏差作為粗差予以剔除; 其中IGS站提供的ZTD數據精度為4 mm, 可作為ZTD檢驗的參考值[17], 檢驗結果如圖2所示。可見, 參與桂林ZTD解算的IGS站觀測的ZTD與IGS站提供的ZTD數據具有較好的一致性, BJFS和TWTF站的相關性達到0.98以上, RMS分別為5.3和5.6 mm。因此, 用桂林CORS基準站解算的ZTD產品來評估對流層延遲模型的精度是具有參考價值的。
2.3 模型精度評估
2.3.1 模型偏差和RMS統計 為檢驗每年6、 7月桂林暴雨季節GPT2w模型和UNB3m模型在桂林地區ZTD的計算精度, 本文選取分布在桂林地區8個CORS基準站2017年6—7月(年積日第152—213天)解算的ZTD數據作為參考值, 對GPT2w模型(由于GPT2w模型具有1°和5°的格網分辨率, 為方便后續描述分別簡稱為GPT2w-1和GPT2w-5)及UNB3m模型計算的ZTD進行精度檢驗, 并對8個測站的偏差和RMS進行月統計, 結果見表2。
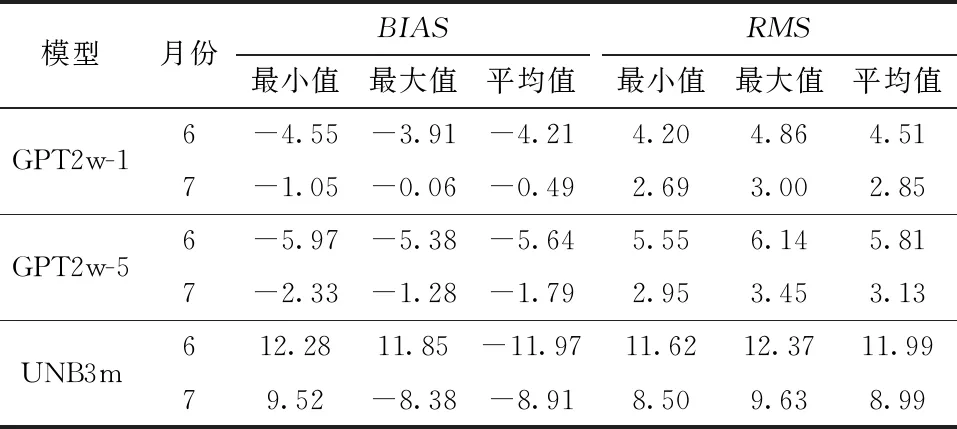
表2 各模型2017年6、 7月的BIAS和RMS統計
各模型在桂林地區整體上呈現出負偏差, GPT2w-1、 GPT2w-5和UNB3m模型最大負偏差均出現在6月, 其值分別為-4.55、 -5.97和12.28 cm, 而GPT2w-1模型最大月均偏差值小于GPT2w-5和UNB3m模型; 各模型的RMS最小值均出現在7月, 其值分別為2.69、 2.95和8.50 cm, UNB3m模型表現出更大的月均RMS, 其最大值可達12.37 cm, 大于GPT2w模型的RMS最大值(4.86~6.14 cm)。綜上所述, GPT2w-1模型表現出較好的精度, 各模型在7月的精度要優于6月的精度, 主要是6月份的極端天氣較多, 造成模型在該區域出現一定的系統性偏差, 導致模型穩定性相對較差。
2.3.2 對流層延遲模型日偏差與降雨量的時間序列 與桂林CORS站并址的8個氣象站實測降雨量數據顯示, 在年積日177—185中桂林地區存在暴雨天氣(24 h內降雨量超過50 mm的強降雨過程)。 為驗證暴雨與對流層延遲模型的影響, 以年積日177—185為例, 得到對流層延遲模型的日偏差與降雨量的時間序列, 結果如圖3所示。
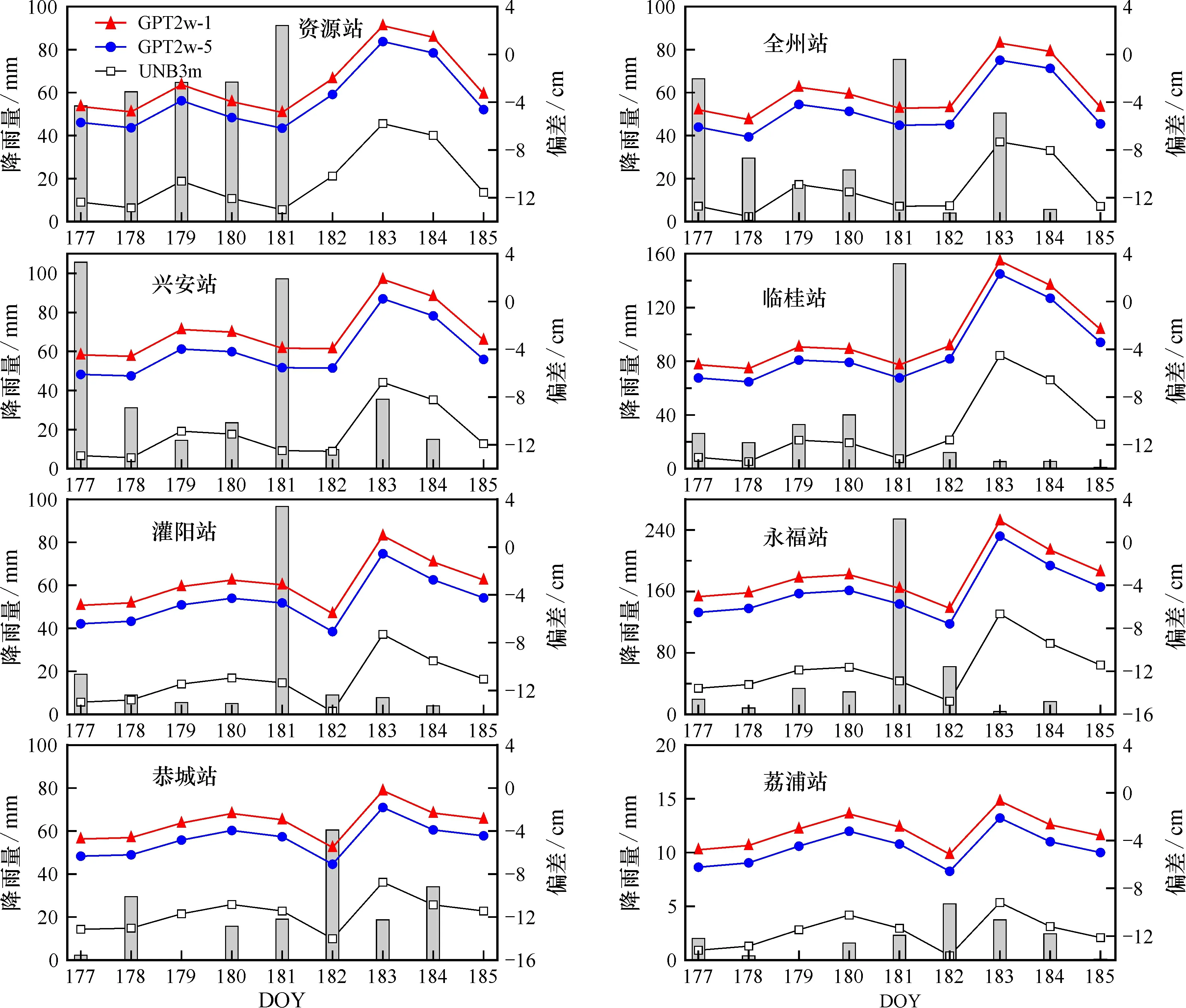
圖3 模型日偏差與實際降雨量時序分布比較
可知, 在年積日177—180天, 在降雨量較少的測站中模型日偏差變化較為平緩, 如灌陽站和永福站, 而在降雨量較多的資源站中模型日偏差較于前者表現出更大的波動; 在第181天內存在暴雨天氣的測站中, 各模型日偏差值在48 h內呈現較大的波動, 降雨量較多的永福站和臨桂站表現較為顯著, 其中各模型在臨桂站中最大日偏差變化量為8.7 cm, 而降雨量較少的灌陽站為6.5 cm。整體上, GPT2w和UNB3m模型的日偏差變化趨勢基本一致, 部分測站的降雨量對模型日偏差存在顯著的影響。
2.3.3 暴雨前后24 h精度評估 為分析暴雨前后24 h對流層延遲模型的精度, 選取年積日第181天(暴雨)前后24 h降雨量較少的臨桂站為例, 以6 h為時間間隔對對流層延遲模型在臨桂站年積日第180、 181和182天的精度進行統計, 得到暴雨前后臨桂站模型偏差和RMS時間序列圖, 如圖4所示。可知, UNB3m模型相比于GPT2w模型表現出較大的偏差和RMS值; 在暴雨前, 各模型偏差和RMS值保持著相對穩定的水平; 在第181天中, 臨桂站的偏差呈現緩慢遞增的趨勢, 在24 h中達到最大偏差, 隨后24 h內, 偏差呈現緩慢遞減的趨勢, 隨后在182天的12:00—18:00時中, 偏差具有顯著的遞減趨勢, 同時RMS也具有相同的變化特征, 說明對流層延遲模型在暴雨前后的精度會受到一定程度的影響, 主要原因是對流層延遲模型在建立時未考慮極端天氣下(暴雨)會導致模型出現顯著的系統性偏差, 對模型的穩定性造成相對的影響。
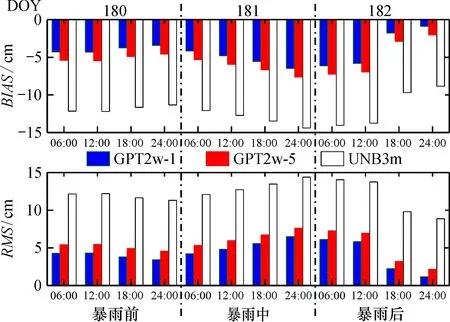
圖4 暴雨前后24 h各模型BIAS和RMS時間序列
2.3.4 不同天氣下模型的殘差統計 為進一步分析對流層延遲模型在暴雨天氣下的適用性, 選取晴朗天氣(年積日第201—209天)與存在多日降雨天氣(年積日第177—185天)為時間段, 分別對GPT2w-1、 GPT2w-5和UNB3m模型估算的ZTD與桂林CORS基站解算的ZTD產品進行逐小時對比, 統計各模型與CORS基準站的殘差(模型值與參考值之差), 結果見圖5。
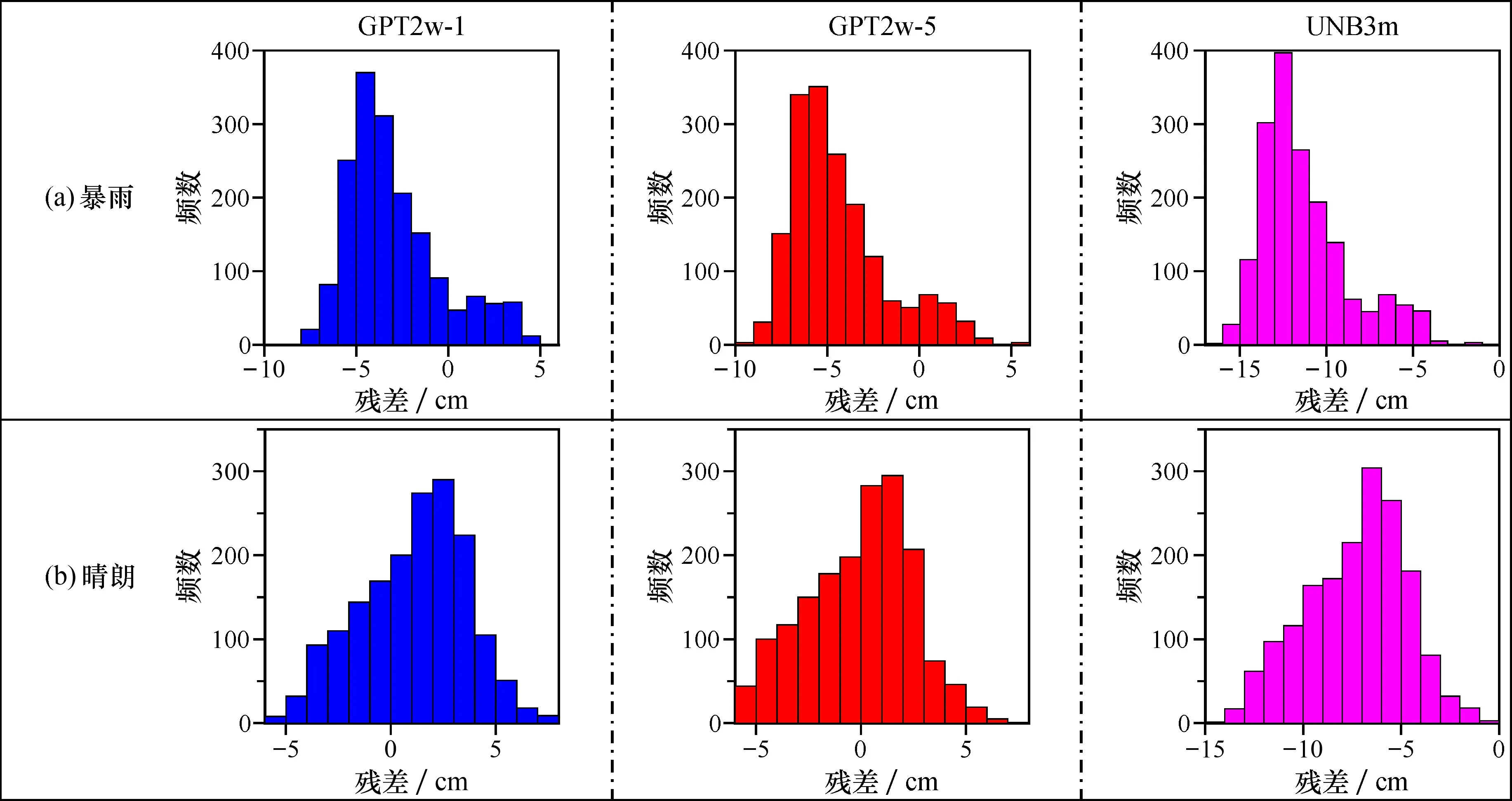
圖5 暴雨(a)和晴朗(b)天氣下各模型計算ZTD的殘差分布直方圖
對比可知, 在暴雨情況下GPT2w模型殘差整體上表現為負殘差, 而UNB3m模型在晴朗和暴雨天氣情況下均表現出負殘差值, 在暴雨的情況下表現出更大的負殘差, 其中GPT2w兩種分辨率的模型殘差主要集中在5 cm左右; UNB3m模型殘差較于GPT2w模型顯著, 主要集中在13 cm, 殘差較大。GPT2w模型在晴朗天氣下的殘差主要集中在3 cm左右, 而UNB3m模型主要分布在6 ~ 7 cm, UNB3m模型較于GPT2w模型表現出較大的殘差, 進一步表明GPT2w模型的性能優于UNB3m模型, 且各模型在晴朗天氣下的殘差值要小于暴雨天的殘差值。
2.3.5 不同天氣下模型的平均偏差和RMS統計分析 為進一步對GPT2w-1、 GPT2w-5和UNB3m模型在暴雨天氣下的適用性進行分析, 以上述18 d為時間段, 對8個CORS站對應的偏差和RMS取均值, 得到桂林地區平均偏差和RMS的時間序列, 結果見圖6。
在暴雨天氣下(圖6a)各模型整體上呈現出負偏差, GPT2w-1和GPT2w-5和UNB3m的平均偏差分別為-2.94、 -4.37和11.26 cm, RMS分別為3.77、 4.86和11.37 cm。UNB3m模型相較于GPT2w-1和GPT2w-5表現出更大的負偏差和RMS, 最大值分別為-13.1、 13.12 cm; 而GPT2w-1模型與GPT2w-5模型的偏差和RMS均小于7 cm。 從整體上看, GPT2w模型在暴雨天氣下的精度要優于UNB3m模型。在晴朗天氣下(圖6b)UNB3m模型整體上呈現出了負偏差而GPT2w-1與GPT2w-5模型呈現出較小的負偏差和正偏差; 其中GPT2w-1和GPT2w-5模型的平均RMS分別為2.59和2.34 cm, 而UNB3m模型平均RMS為7.45 cm。
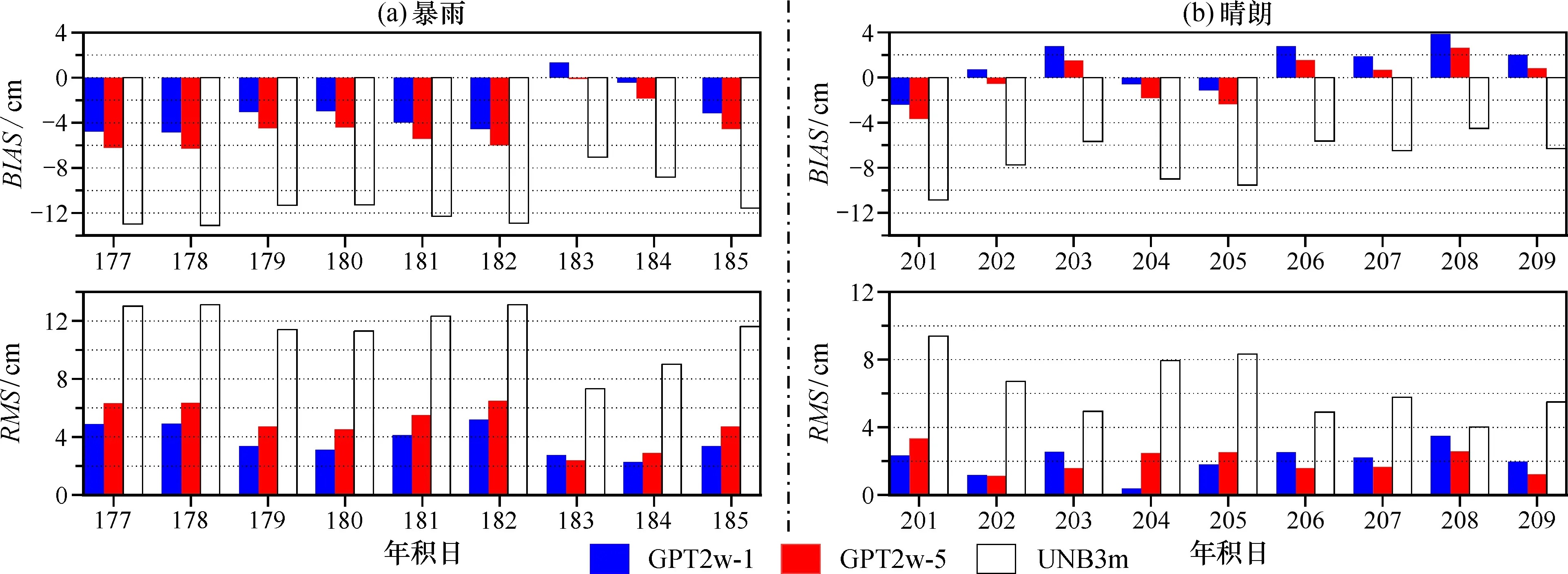
圖6 不同天氣下各模型BIAS和RMS時間序列
對比發現, 在晴朗天氣下各模型的偏差和RMS值均小于暴雨天氣, 且偏差和RMS波動較小, 說明在晴朗天氣下模型的精度及穩定性要優于暴雨天氣下模型的精度。 此外, GPT2w模型在晴朗天氣下和暴雨天氣下的精度普遍優于UNB3m模型。
3 結束語
本文采用CORS基準站解算的ZTD產品對GPT2w和UNB3m模型在桂林地區暴雨天氣下的適用性進行評估, 結果表明:
(1)GPT2w模型在不同天氣下的精度及穩定性要優于UNB3m模型, UNB3m模型在暴雨天氣下和晴朗天氣下都表現出較大的偏差和RMS, 主要原因可能為UNB3m模型為條帶模型, 格網分辨率較低且未考慮到經度變化及未顧及濕度梯度等因素。
(2)GPT2w和UNB3m模型在晴朗天氣下的精度普遍優于暴雨天氣下的精度, 其中暴雨天氣下GPT2w模型的偏差和RMS均優于7 cm, 而UNB3m表現出更大的偏差和RMS。
綜上所述, 在桂林地區暴雨天氣下GPT2w模型相較于UNB3m模型具有較好精度及穩定性, 可滿足暴雨天氣下導航定位的需求和應用。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
