異形仿古建筑傾斜攝影建模及可視化方法
2022-04-05 04:10:18仇繼圣付波霖李佳豪李慧敏勞植楠
桂林理工大學學報 2022年3期
李 寧, 仇繼圣, 付波霖, 李佳豪, 李慧敏, 勞植楠
(1.桂林理工大學 測繪地理信息學院, 廣西 桂林 541006; 2.福州大學 數字中國研究院(福建), 福州 350108)
0 引 言
傾斜攝影技術是近十多年測繪領域發展起來的一項高新技術, 通過無人機多視角拍攝獲取建筑物垂直和傾斜角度的高分辨率影像, 采集建筑物頂面及側面的紋理特征, 填補了以往航空攝影僅有垂直拍攝方向的缺陷[1]。傾斜攝影測量技術能適應極端的天氣和環境條件變化, 并可深入地形結構復雜和無人區域進行探測[2]。無人機搭載傳感器后通過傾斜攝影便可獲取地面影像和物體掃描點云, 利用這些數據可以進行DOM數字正射影像的生成、 影像多光譜分析和DLG的生產等二維的測繪工作, 并可通過ContextCapture、 StreetFactory等軟件實現快速實景三維建模, 建模流程人工干預少, 能實現半自動化、 高效率地構建出真實三維場景[3]。
相較于傳統的三維模型, 傾斜攝影三維模型所反映的地物的位置、 外觀和周圍環境等特性更加貼近現實世界, 包含更豐富的數據信息, 滿足航空攝影測量需求。傳統測量方式受載荷量大、 耗時長、 飛行成本高等因素影響局限性較大, 無人機作業則具有靈活性強、 作業速度快、 性價比高等傳統測量方式所不具備的優勢, 因此無人機傾斜攝影測量現已成為獲取地面三維模型的重要途徑, 被廣泛應用于測繪、 城市規劃、 地質災害等領域[4]; 李德仁等利用無人機傾斜攝影技術生成的DEM和實景三維模型, 結合地面移動測量系統采集的實景影像、 興趣點等數據, 實現了巡航、 建筑變化監測等城市環境監測功能, 為城市的高效管理和監測提供新思想[5]; 曹爽等利用單鏡頭無人機傾斜攝影實現了單體建筑的三維模型構建[6]; 褚杰等利用無人機傾斜攝影測量技術采集襄陽劉集機場、 火車站等地的傾斜影像, 進行實景三維建模, 對3種三維建模方式進行比較, 列出了傳統測繪手工建模與無人機傾斜攝影測量建模方法的優勢與不足[7]; 陳建軍利用無人機傾斜三維攝影技術生產城市高精度模型, 并利用模型成果在應急測繪領域的應用進行討論[8]; 高勇強探討了無人機傾斜攝影技術在地勢起伏大、 地形復雜的地區進行測量的方法,并對建模的精度和可行性進行分析[9]; 康傳利等利用無人機傾斜攝影技術實現了虛擬現實仿真應用[10]; 孫保燕等提出了一種三相位環繞采集技術對被測文物進行視頻錄制, 對視頻勻分幀處理, 將分幀圖像用于建模[11], 并針對紋理精致、 形貌怪異的文物數據采集, 以及成像的景深難題, 提出一種融入漸進式過渡影像, 多視角影像與紋理細節照片相結合的框架式二維圖像采集方式非測量相機在異形文物三維模型重建中的應用[12]。 復雜場景的可視化仍是當今傾斜攝影實景三維模型重建應用的難點之一。當前國內利用傾斜攝影技術所構建的實景三維場景大都以現代建筑和城市景觀為主[13], 而對于仿古建筑這類復雜結構建筑的三維場景構建及可視化方法研究較少, 因此本文探討如何利用傾斜攝影技術進行異形仿古建筑的三維建模研究具有重要現實意義。
本文以桂林園博園景區為研究對象, 利用成都縱橫 CW-15 無人機和五鏡頭SONY ILCE-5100相機獲取景區的傾斜影像數據, 借助ContextCapture軟件對傾斜攝影數據進行空三解算、 點云加密和匹配、 TIN網生成、 自動紋理映射、 測區3D實景粗模型建立。利用中海達V90 RTK采集30個驗證點數據, 根據成果質量檢查規范對實景模型的平面精度及高程精度進行分析, 通過統計平面中誤差和高程中誤差, 驗證實景三維模型的精度。同時, 在測區3D粗模型的基礎上再分別利用DP-Modeler和SketchUp、 3ds Max 軟件對異形仿古建筑進行單體化精細建模, 綜合比較建模效率和可視化效果、 重建模型細部與精細模型差異程度, 為異形仿古建筑三維建模可視化表達提供技術參考。
1 試驗區概況及無人機數據處理
1.1 試驗區概況
園博園景區面積約0.766 km2, 位于桂林市雁山區雁山鎮和大埠鄉內, 具體地理位置如圖 1所示。園博園公共園區內包含山水園林館、 濕地館、 大雁閣、 秀甲天下樓、 精品街及游客服務中心等建筑。園區建筑均為仿古建筑式樣, 將飛檐、 翹角、 灰瓦、 黃墻等諸多建筑元素融匯,是展示桂林傳統建筑特色的窗口。景區內為丘陵地形,地形雖有起伏,但整體坡度較平緩,對無人機飛行作業和傾斜攝影測量三維建模帶來一定的影響, 但由于園區內各場館間相對開闊,其影響可以忽略不計。
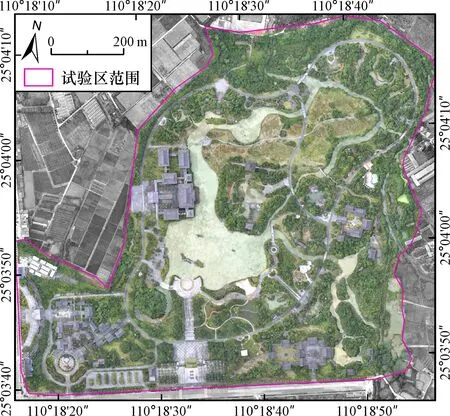
圖1 研究區概況
1.2 航攝數據獲取與像控點布設
利用成都縱橫CW-15無人機(最大載重3 kg, 最高續航160 min, 最高通信距離25 km, 最大抗風6級)搭載五鏡頭SONY ILCE-5100相機于2019-07-05T15:00—16:30獲取試驗區傾斜影像數據集。研究區地勢平緩, 面積較小, 且高低起伏不超過5 m, 在移動工作站中用谷歌地圖劃定航飛區域導出*.kmz文件, 將文件導入CWCommander軟件, 設置航攝參數后自動生成最佳蛇形封閉飛行路徑, 主要航攝參數: 航向重疊度為80%, 旁向重疊度為75%, 相對航高195 m, 地面分辨率為2.35 cm。通過對航線與特殊航路點的編輯實現無人機起降工作, 重要點在于一般設置第1個航路點為垂直起飛點, 倒數第2個航路點為預降落點, 設置0號航路點為應急降落點用于緊急情況線盤旋。設置著陸飛行計劃后自動生成降落路線, 在地圖上兩點生成進場方式, 設置接地點自動生成。檢查飛行計劃, 離線航飛高程預校驗, 對航測區域進行地形檢查后, 整個航飛任務編輯完成。地面站航線設置如圖2所示。飛行一個架次共獲取影像4 550張。
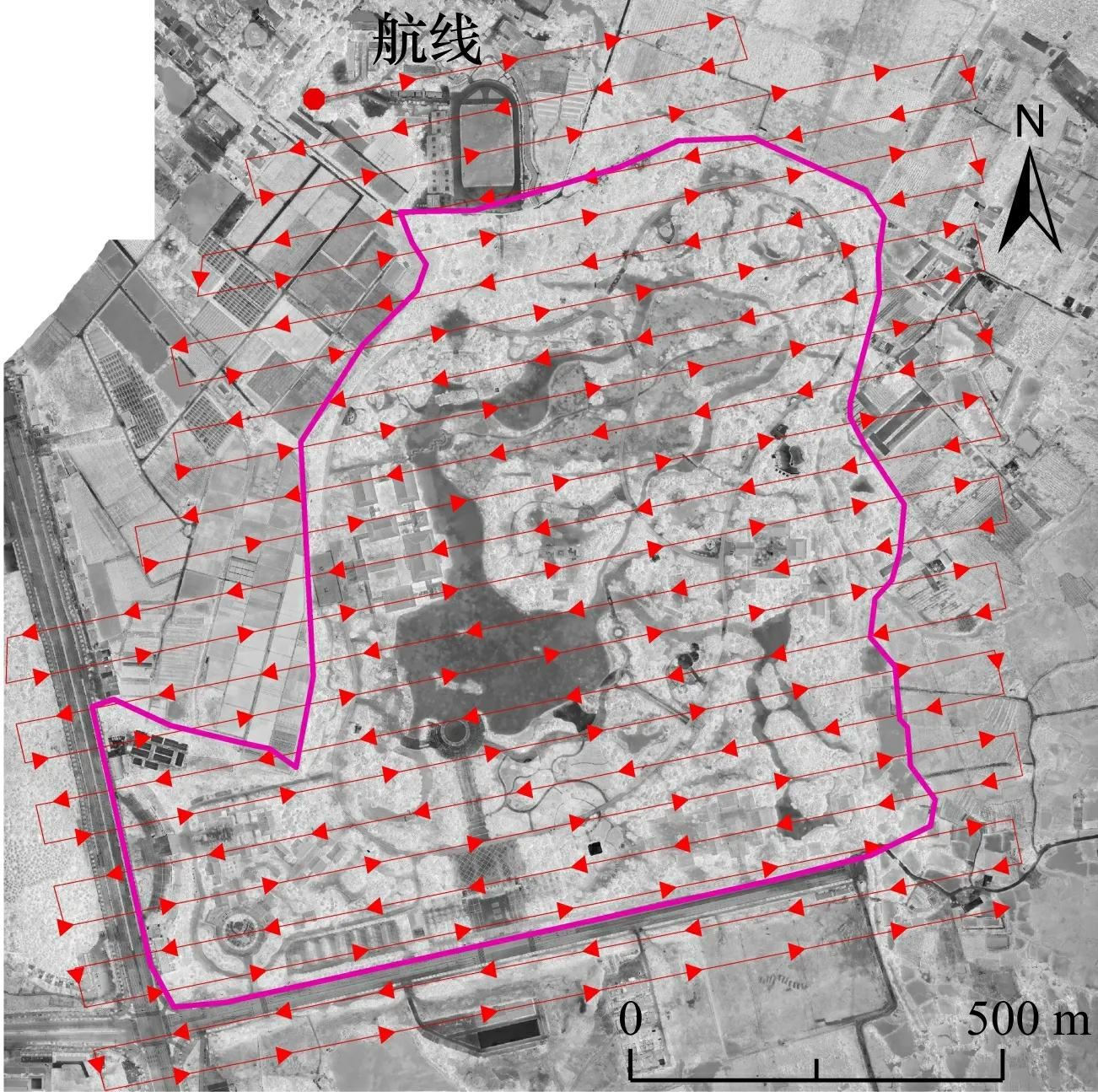
圖2 航空任務航線設置
像控點是攝影測量控制加密和測圖的基礎, 野外像控點目標位置、 密度、 分布及測量精度直接影響航攝數據處理精度。依據《低空數字航空攝影測量外業規范》(CH/Z 3004—2010)中控制點及檢核點布設原則, 使用中海達V90 RTK在飛行區域內共布設7個像控點和30個檢核點, 平面坐標為CGCS2000, 高程系統為1985國家高程基準, 像控點及檢核點布設位置如圖3所示。
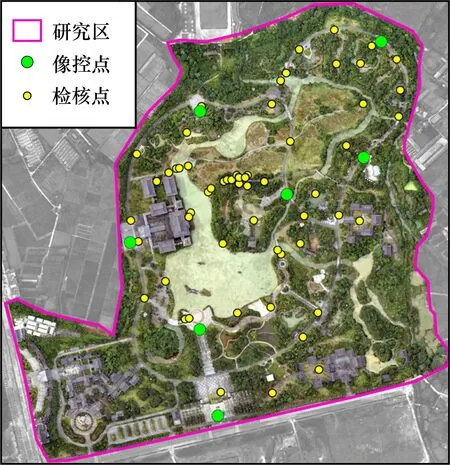
圖3 檢核點與控制點分布
1.3 傾斜攝影數據處理
利用ContextCapture(以下簡稱CC)軟件進行無人機航攝影像數據處理。無人機野外航飛獲取的無人機航片及POS數據后, 內業使用Adobe Lightroom將航片質量整體調整優化, 得到初步處理后的完整原始數據。將初始數據及控制點數據導入CC后進行航片數據檢查及控制點刺點, 確認數據合理無問題后創建集群工程, 設置統一的地理參考并劃分工作區塊, 設置需要的輸出格式, 通過計算機集群進行區域網平差、 影像匹配、 正射糾正等計算后得到的紋理信息與同步生成的TIN網進行映射, 得到初始園博園實景三維數據, 導出OSGB與OBJ格式用于DP-Modeler進行場景修復。無人機傾斜攝影的實景建模流程如圖4所示。

圖4 無人機傾斜攝影建模流程
利用5個多角度傳感器航攝影像及其POS數據, 再整合航高、 航向、 航速、 旁向重疊度和坐標等飛行參數, 作為粗初始外方位元素, 采取金字塔匹配策略, 由粗到精進行多影像同名點自動匹配和自由網光束法平差, 得到較好的同名點匹配結果, 結合一定數量野外控制點坐標, 聯合解算得到傾斜影像聯合空中三角測量結果[14]。在CC中添加多視角影像數據并導入控制點進行空中三角測量運算。基本原理是描述地面點、 像點與投影中心共線關系的共線方程為

其中:x、y表示像點的平面坐標;x0、y0、f表示航攝影像的內方位元素;ai、bi、ci(i=1,2,3)表示外方位角元素的系數;XA、YA、ZA表示物方點坐標;XS、YS、ZS表示攝站點坐標,通過解算可得出加密點的空間位置。
完成空三加密后, 在CC中新建重建項目以重建三維模型, 設定模型的空間框架為1 477.03 m×1 537.84 m×214 m且像控點刺點誤差最高為0.03 m符合模型生產規范。根據規則格網設置測區劃分, 瓦片大小為100 m以提高軟件生成三維模型的效率。利用多視影像密集匹配技術對立體像對進行點云匹配工作, 點云密集匹配會先在軟件劃分的所有瓦片中進行, 通過建立統一參考系WGCS2000進行合并進而輸出點云匹配結果。軟件可自動依據生成的點云文件創建TIN網, 得到測區未貼圖的三維模型, 模型表面TIN網與真實紋理效果如圖5所示(Acute3D Viewer瀏覽視角, 其中第1排為園博園山水園林館, 第2排為園博園大雁閣), 最終通過自動紋理映射將完成解算的紋理信息賦至表面模型得到具有真實紋理的實景模型。五鏡頭無人機的側翼鏡頭傾斜拍攝解決了正射視角的無法收集的異形建筑盲區結構, 將側攝航片信息加入空三解算使異形仿古建筑的隱蔽側面信息得到充分重建, 重建結果異形建筑信息保留度高, 五鏡頭無人機作業一定程度解決了異形建筑側面信息獲取問題, 提高了重建結果的質量。
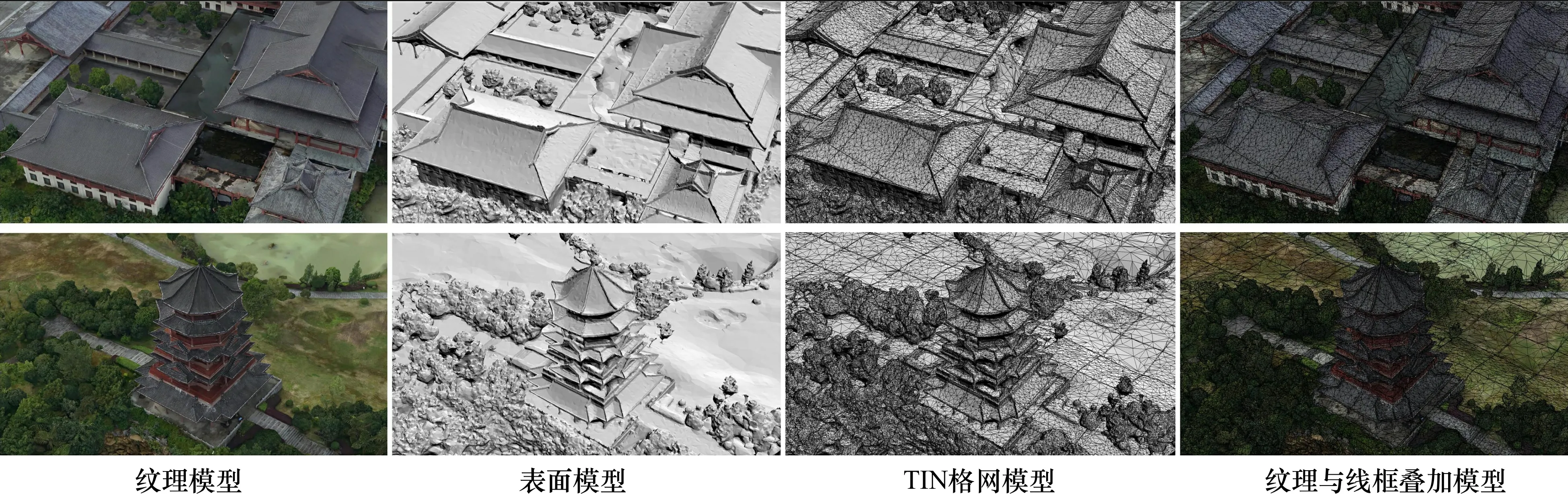
圖5 模型表面TIN與真實紋理
1.4 傾斜攝影實景模型精度驗證

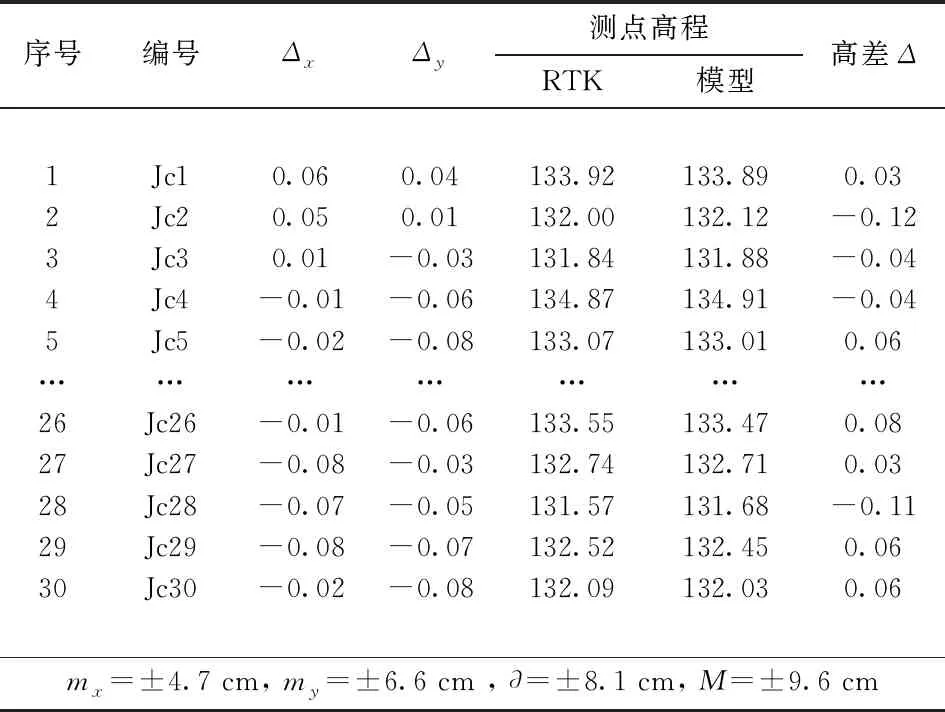
表1 檢查點精度對比分析
結合《三維地理信息模型數據產品規范》(CH/T 9015—2012)中三維模型景觀相關內容, 本實驗結果平面精度中誤差小于±0.3 m, 高程精度中誤差小于±0.5 m, 屬于Ⅰ級三維模型景觀產品。
2 異形仿古建筑精細化建模對比
由于航空攝影測量中外方位元素中像片旋角、 航高約束會使得航片間像素特征點出現不匹配現象,進而將會導致模型出現懸浮塊、模型變形、紋理映射失敗等情況,在模型的模體與紋理精度的合理范圍內,需采取局部精細修模的方法進行模型糾正。通過DP-Modeler的測量工具獲得建筑結構參數, 利用3ds Max和SketchUp進行精細建模,賦予真實紋理,對兩軟件建模綜合效果及隱蔽的模型信息進行比較。
2.1 基于DP-Modeler和SketchUp的異形仿古建筑精細化建模
分別利用DP-Modeler、 SketchUp軟件的建模優勢對研究區內仿古建筑進行精細建模比較, 運行條件: CPU, I3 8100; GPU, RX580; RAM: DDR4 2400 16 GB。利用DP-Modeler刪除模型的浮空物、 修補空洞, 以及仿古建筑的建筑結構比例量測, 將量測結果用于在SketchUp中進行等比例精細建模。復雜建筑結構(如研究區仿古建筑中廊、 檐、 榫、 卯等結構), 可循環使用SketchUp右鍵操作欄中的工具進行建模。相比之下, 3ds Max要使用數量遠多于SketchUp的工具進行建模, 建模復雜程度越高, 模型的后期編輯越困難。復雜的操作工具增加了學習和使用成本不利于可視化建模及表達效率的提高, 這是3ds Max的缺點之一。本實驗中, SketchUp建模產品相比3ds Max的建模產品在同等配置下運行時會略顯卡頓, 原因是SketchUp對面片重疊、 平面交錯優化效果弱于3ds Max, 造成數據重復冗余。
以大雁閣塔頂為例, SketchUp建模方法如下: 1)利用圓工具及直線工具通過刪除半圓得到半圓面; 2)采用矩形工具及線工具通過刪除獲得直角三角形; 3)利用路徑跟隨工具以半圓為路徑, 直角三角形為跟隨元素獲得半圓錐體; 4)利用旋轉工具將線旋轉60°、 120°后連接得到等邊三角形, 利用縮放比例工具和等邊三角形進行弧面調整; 5)利用旋轉工具將其旋轉45°到新對象, 復制參數為×7, 塔頂粗建模即完成。3ds Max的建模思路如下: 1)通過創建工具得到長方體, 將其轉化為可編輯多邊形; 2)選擇編輯點工具使用塌陷命令獲得三棱柱; 3)選擇編輯邊工具選中三棱柱底部兩條平行邊, 利用連接命令設置邊分段為5, 得到6個長方形; 4)選擇編輯點或線, 通過移動工具進行弧面調整, 得到1/8塔頂形狀; 5)利用旋轉工具選擇層次工具中的僅影響軸命令, 利用捕捉工具移動xyz軸中心放在1/8塔頂頂端, 通過調整旋轉得到新對象, 復制參數為×7, 塔頂粗建模即得到塔頂。
2.2 模型局部精細化修復
五鏡頭航飛使異形仿古建筑的局部隱蔽信息重建度得以提高, 但可視化結果仍不理想, 還需要人工精細化建模。這得益于側面信息的完整度較高, 可推理出仿古建筑結構特征, 再根據其特征進行人工重建。如圖6中, 建筑a(濕地館)由于植被遮擋造成實景模型重建過程信息缺失造成建筑的紋理信息不匹配, 通過DP-Modeler的建筑結構量測易從周圍模型信息得到建筑層高、 房梁比例等信息, 根據這些信息對隱蔽面進行精細化建模, 將其紋理信息恢復, 得到具有正常建筑信息的模型; 建筑b、 c、 d由于五鏡頭無人機工作俯角度數高, 未能夠將建筑被檐頂遮蔽的門、 窗、 欄桿等建筑信息收集完全, 造成實景模型重建出現拉絲、 模糊等現象較為嚴重。結合實際, 通過精細化建模恢復到具有精細紋理的表面模型, 紋理、 結構信息得到參數化重建, 是未來智慧城市系統應用的重要數據源之一。

圖6 仿古建筑精細模型局部對比展示
2.3 單體精細化效果對比
精細化模型應用的影響因素主要有建模效率、 可視化效果。本文在原軟件中利用3ds Max和SketchUp對研究區內較有代表性的建筑物大雁閣進行實景建模對比(圖7), 分別通過3ds Max中精簡材質編輯器與SketchUp中材質面板聯動PhotoShop CC對航攝圖片進行裁剪、 紋理自由變換得到模型每個面的真實紋理進行貼圖, 最后得到模型詳細對比信息見表2, 結合上文可視化效果分析可知, 兩軟件建模效果觀感非常相近。
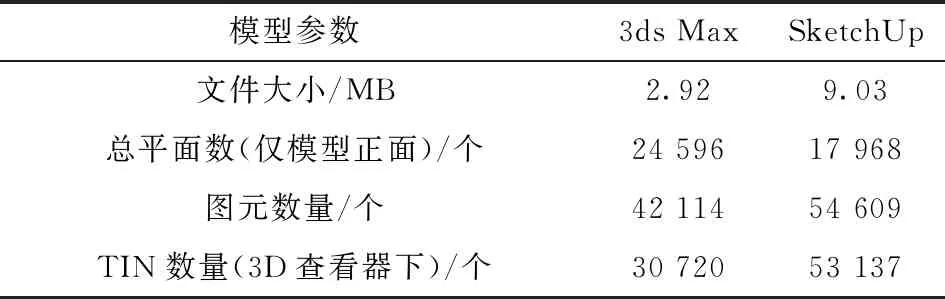
表2 SketchUp與3ds Max大雁閣模型參數對比
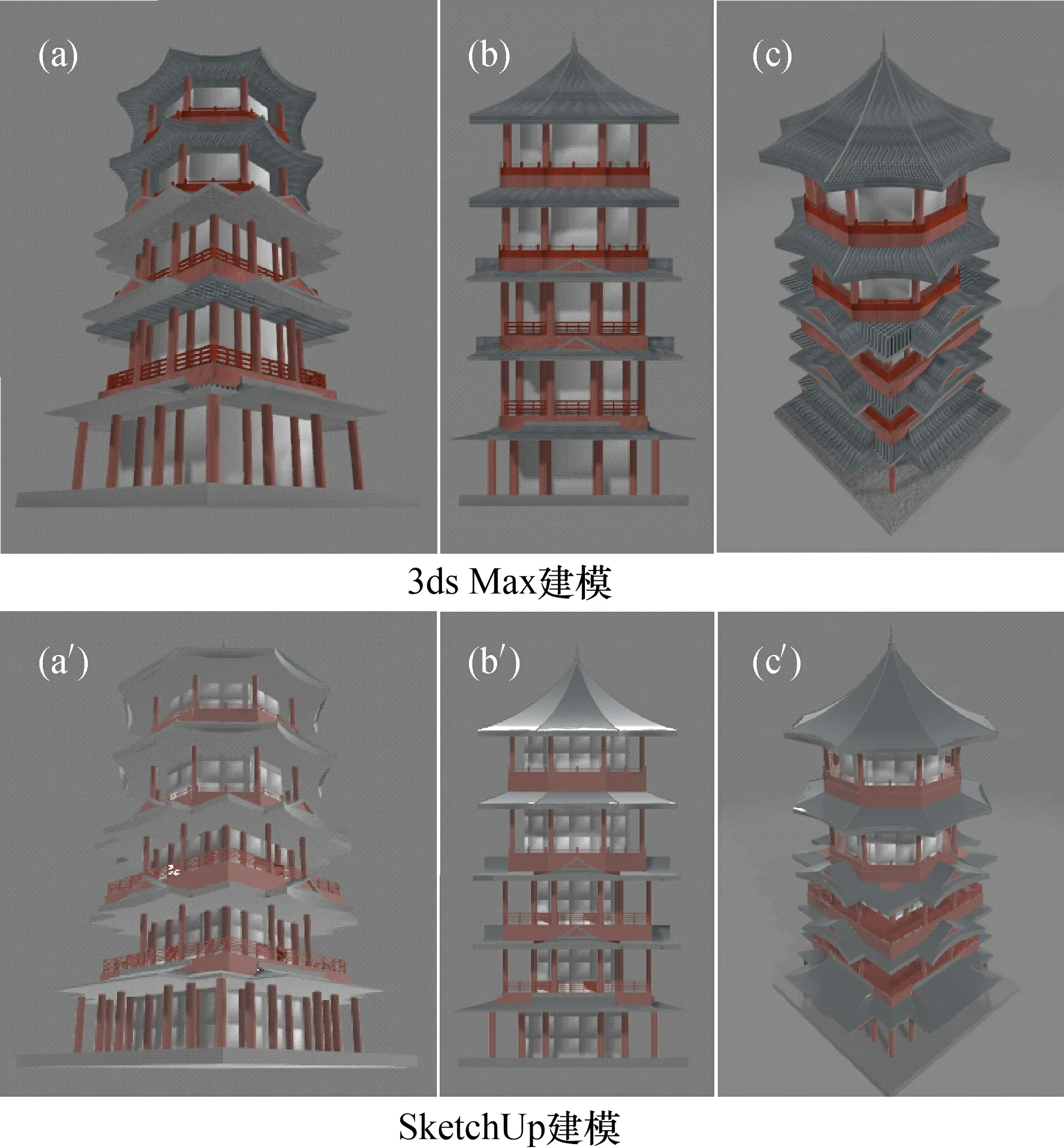
圖7 3ds Max和SketchUp建模效果對比
相對于3ds Max, 使用SketchUp進行建筑精細化建模能夠使模型平面數減少26.9%, 而模型文件大小更多取決于軟件數據結構及貼圖質量, 在此不作為比較重點。因此, SketchUp在滿足較低學習成本的同時, 還能減少數據冗余量, 節約顯示圖元計算, 在城市三維景觀及智慧城市精細化模型數據建設的應用能夠優于3ds Max。
3 結 論
以桂林市雁山區園博園景區為試驗區域, 利用無人機傾斜攝影技術、 專業無人機影像處理軟件ContextCapture、 三維建模軟件SketchUp進行園博園三維實景模型的構建, 對比SketchUp與3ds Max的建模效果并對三維模型精度進行驗證, 最終將實景模型精細化建模, 得到以下主要結論:
(1)采用無人機傾斜攝影技術結合ContextCapture對園博園景區進行建模, 相比傳統建模方式, 該方法可進行大面積三維場景建模, 具有速度快、 自動化程度高、 模型逼真、 模型精度高等優點。
(2)用ContextCapture進行建模具有傳統建模方法無法比擬的優勢, 但易出現漏洞、 懸浮碎塊、 紋理變形等情況, 需借助第三方軟件整飾模型以改善模型顯示效果, 在此基礎上對模型建筑進行單體化建模才能保證輸出的模型更好地應用于研究中。
(3)在仿古建筑建模過程中, SketchUp能將仿古建筑中廊、 檐、 榫、 卯等異形結構通過工具欄已有工具快速構建, 而3ds Max中進行相同步驟則需要多次利用修改器進行點、 線、 面要素切換, 其中捕捉和擠出等工具的操作和使用相比SketchUp更加嚴格, 對操作人員的要求更高, 綜合多種因素對比下SketchUp時間效益和便捷程度上優于3ds Max。
本文提出的基于航空攝影測量技術的異形仿古建筑三維建模方式, 因其靈活性強、 作業速度快、 性價比高等優勢在實景三維場景建模中發揮了重要作用, 可為城市規劃、 數字城市建設、 險情評估、 文物保護等領域提供幫助。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中等數學(2022年2期)2022-06-05 07:10:50
北方建筑(2021年6期)2021-12-31 03:03:54
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
文苑(2020年10期)2020-11-07 03:15:36
小學生學習指導(低年級)(2020年6期)2020-07-25 02:31:36
現代裝飾(2020年6期)2020-06-22 08:43:12
數學物理學報(2020年2期)2020-06-02 11:29:24
小學生學習指導(低年級)(2018年9期)2018-09-26 05:59:44
瘋狂英語·新讀寫(2018年2期)2018-09-07 09:32:10
