非視距環境下UWB節點的LS定位算法
2022-04-05 04:10:28吳俊康張烈平匡貞伍神顯豪張祖瓊
桂林理工大學學報 2022年3期
吳俊康,張烈平, 匡貞伍, 神顯豪, 張祖瓊
(桂林理工大學 a.機械與控制工程學院; b.信息科學與工程學院; c.網絡與信息中心, 廣西 桂林 51006)
0 引 言
相比于Wi-Fi、 射頻識別、 超聲波等定位技術, 基于超寬帶(ultra wideband, UWB)的定位技術具有厘米級精度、 良好的抗分徑能力, 抗干擾能力、 強穿透性等優勢。這些優勢使得UWB技術在復雜環境中具有高可靠性, 更有利于復雜環境下動態數據的收集和對目標的定位[1-2]。由于復雜環境中存在人、 墻體等障礙物, UWB信號在傳播的過程中會產生反射, 因此產生了非視距(non line of sight, NLOS)誤差、 多徑誤差等, 其中NLOS誤差是最主要的誤差, 對測距、 定位和跟蹤的精度、 實時性、 魯棒性都會產生較大影響[3]。
常用的UWB測距方法有兩類, 基于基站節點與待測目標的距離關系和基于基站與待測目標的角度關系[4]。其中, 基于基站節點與待測目標的距離關系的典型方法為基于接收信號到達時間法(time of arrival, TOA)、 基于接收信號到達時間差法(time difference of arrival, TDOA)和基于接收信號強度法(received signal strength indication, RSSI)等[5]; 而基于基站與待測目標的角度關系的典型方法有基于接收信號角度法[6]。由于UWB時間分辨能力強, 并且考慮到環境中多徑效應、 NLOS誤差等影響以及硬件設備的制作成本, 基于TOA和TDOA的方法廣泛用于UWB測距。基于TOA測距算法本質上是對標簽到基站距離方程求解, 常見基于TOA測距的定位算法有最小二乘法、 泰勒級數和三邊質心定位算法[7]。TS定位算法具有不錯的定位精度和魯棒性, 但需要設置初值, 若初值選擇不合適, 可能導致算法不收斂。三邊質心定位算法只能用于3個基站節點的定位, 結構比較簡單, 無法利用冗余測距信息來提高精度。LS定位算法憑借具有三邊質心定位算法類似的定位精度, 不需要設置初值, 并且基站節點越多定位精度越高等特點, 是應用較為廣泛的定位算法之一[8]。
本文以NLOS環境下的UWB節點定位為研究背景, 對其中的基于TOA的雙邊雙向測距(double-sided two way ranging, DS-TWR)方法和LS定位算法進行研究, 以期提高UWB定位精度。
1 UWB節點測距方法
1.1 TOA測距方法
圖1為二維TOA測距原理圖。基于TOA測距方法是在基站節點與標簽節點都進行時間同步后, 通過測量標簽節點發送UWB信號到達每個基站節點的時間來進行測距的, 即di=cti(ti為標簽節點MS到基站節點BSi之間UWB信號傳播需要的時間,di為標簽節點到基站節點的距離,c表示無線電信號傳播速度)。最后以每個基站BSi為圓心,ri為半徑畫圓, 所有圓的交點為標簽位置坐標。

圖1 TOA二維測距原理圖
在TOA二維定位中, 有3個基站節點, 每個基站節點坐標為BSi(xi,yi), 其中i=1, 2, 3,標簽節點的真實坐標位置為MS(x,y)。 定位過程中, 基站節點BS1、BS2、BS3會得到MS發送信號到達時間t1、t2、t3, 則每個基站與標簽之間距離di=cti, 于是可得出標簽到基站的距離方程, 求解式(1), 便能得出定位標簽位置坐標。
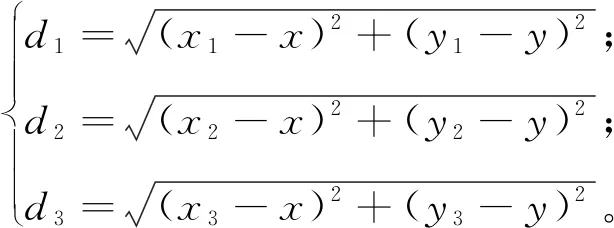
(1)
1.2 DS-TWR測距方法
基于TOA的對稱雙邊雙向測距算法(symmetrical double-sided two way ranging, SDS-TWR)可以有效解決TOA定位方法需要時間同步和設備時鐘漂移等關鍵技術問題, 使得TOA方法在UWB定位和跟蹤研究中受到的關注度最高[9]。SDS-TWR的測距原理圖如圖2所示。
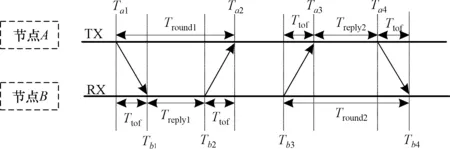
圖2 SDS-TWR測距原理圖
SDS-TWR算法測距過程中, 節點A向節點B發送測距信號, 并記錄下發送信號時間Ta1; 節點B在接收到測距信號后記錄下信號到達時間Tb1并在間隔Treply1后向節點A發送確認UWB信號, 在發送時記錄下發送時刻Tb2; 節點A收到節點B發送信號后記錄下接受時刻Ta2, 隨后節點B反向測距, 在Tb3時刻向節點A發送測距信號; 節點A在Ta3時刻接受到信號并在間隔Treply2后向節點B發送UWB信號, 記錄下發送時刻Ta4; 節點B在接收到信號記錄下到達時刻Tb4;節點A與節點B經過4次通信后, 可以得出Ttof的值:
(2)
其中,Tround1=Ta2-Ta1;Tround2=Tb4-Tb3;Treply1=Tb2-Tb1;Treply2=Ta4-Ta3。
假設節點A的頻率偏差為eA, 節點B的頻率偏差為eB, 則信號在空中傳播的實際時間Tr為
(3)
則傳輸時間誤差ΔT為
(4)
由于Treply1和Treply2遠大于Ttof, 因此eA×Ttof及eB×Ttof可忽略不計, 則
(5)
雙邊測距算法具有很高的測距精度, 但其測距需要進行4次通信, 測距速度慢、 標簽功耗大。針對這些不足, 本文采用DS-TWR算法進行測距[10], 把3次TOA時間求平均后作為最終TOA時間, 從而將SDS-TWR測距需要4次通信降為3次, 以提高測距效率、 減小測距的誤差。DS-TWR測距方法的測距原理如圖3所示。
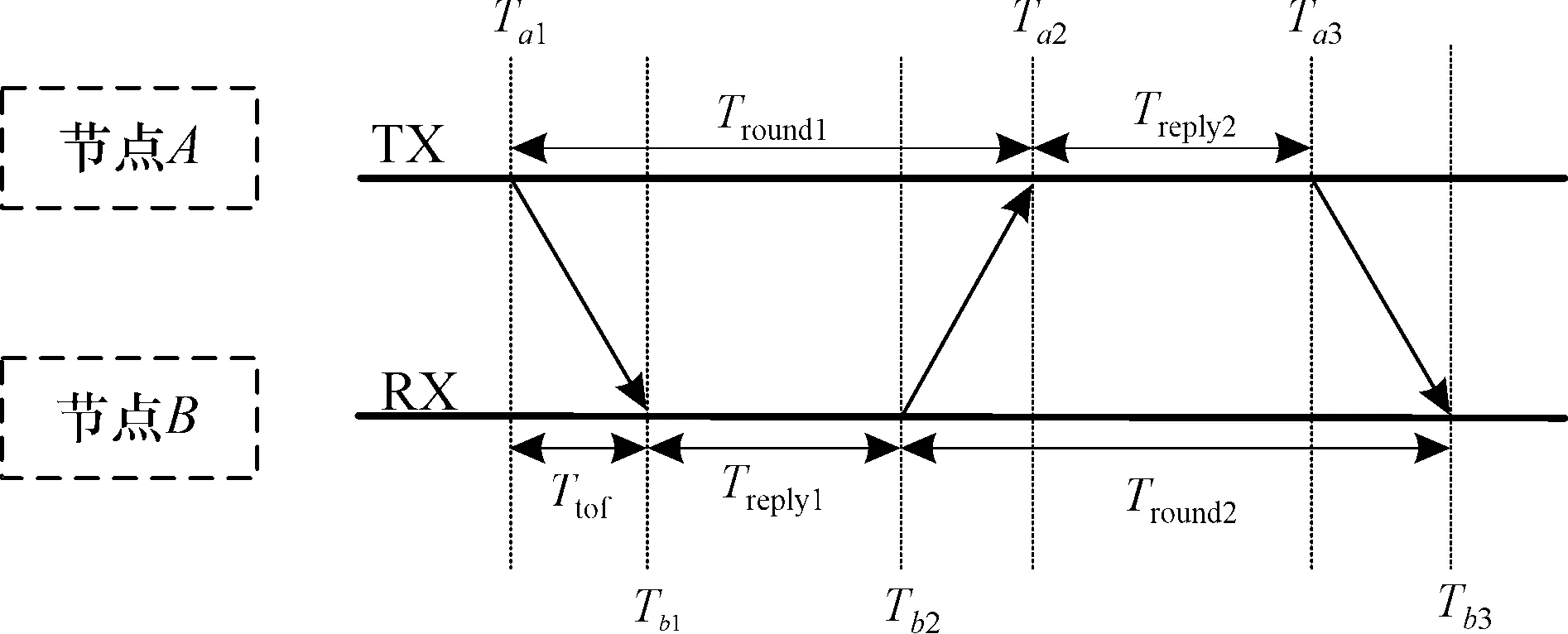
圖3 DS-TWR測距原理圖
DS-TWR測距過程可以描述為: 節點A向節點B發送測距信號, 并記錄下發送信號時間Ta1; 節點B在接收到測距信號記錄下信號到達時間Tb1后, 在間隔Treply1后向節點A發送確認UWB信號, 并在發送時記錄下發送時刻Tb2; 節點A收到節點B發送信號后, 進行類似節點B的操作, 記錄下接收時間Ta2, 延遲時間Treply2后, 再次發送節點B信號, 并記錄發送時間Ta3; 節點B再次在接收到信號后記錄下信號到達時間Tb3。節點A與B經過3次通信后, 可以得出Ttof的值:
(6)
其中:Tround1=Ta2-Ta1;Tround2=Tb3-Tb2;Treply1=Tb2-Tb1;Treply2=Ta3-Ta2。
由于Tround1=Treply1+2Ttof,Tround2=Treply2+2Ttof, 因此有
=Ttof。
(7)
假設節點A與節點B存在時鐘偏差, 并且當前偏離時鐘為原來時鐘的ka、kb倍, 于是時鐘偏移帶來誤差可表示為
(8)
由于時鐘偏移在實際硬件系統是非常小的, 因此ka與kb的值都接近于1, 并且Ttof的實際值通常是納秒級別的, 因此當基站、 標簽數目不多情況下, DS-TWR測距方法不僅可以消除時鐘同步帶來的測距誤差, 還可以抑制時鐘漂移帶來誤差。
2 UWB節點定位的最小二乘法算法
2.1 UWB節點定位過程
UWB節點定位過程如圖4所示。在定位區域安放3個已知坐標位置的基站節點, 以及用于人員、 車輛或物品攜帶的定位標簽節點。每一個標簽節點都有唯一的ID號, 可通過這個ID號將定位對象聯系起來, 使基站節點通過標簽節點找到定位對象的位置。在定位過程中, 標簽節點不斷地與各個基站節點進行通信, 基站節點根據標簽節點發射信號到達基站時間、 角度、 信號強度等獲得標簽與基站節點之間距離信號, 將得到的距離信息代入定位解算算法, 完成標簽節點位置估計。一般來說, 基站節點數量越多, 定位精度越高。
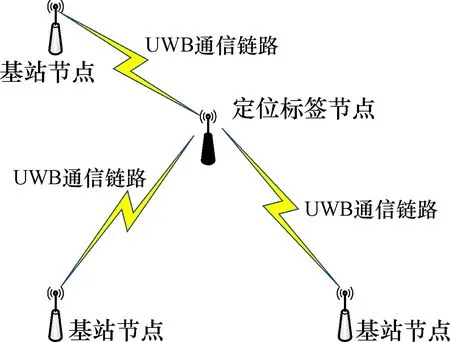
圖4 UWB節點定位過程示意圖
2.2 最小二乘法定位方法
由于標簽到基站距離方程是關于x、y的二次方程, 需要對式(1)等號兩邊同時平方來消除非線性項:
(9)
用第2、 3個方程依次減去第1個方程, 得到
(10)
為了方便求解, 可將其轉換成線性方程組矩陣形式:
ΑX=b,
(11)
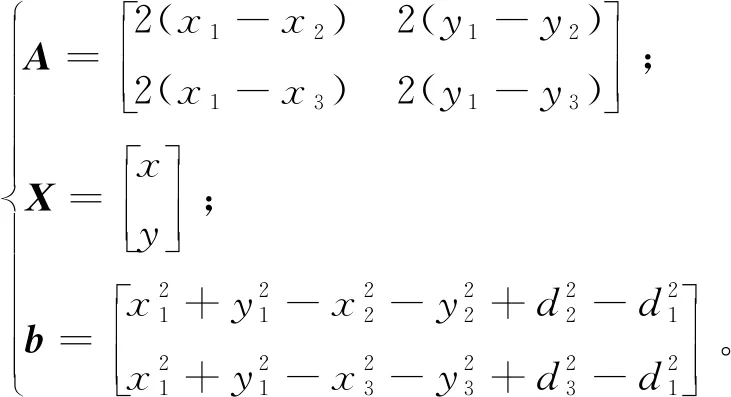
(12)
對式(11)及式(12)用最小二乘法原理, 就可以得到標簽的位置估計
X=(ATA)-1ATb。
(13)
2.3 UWB定位性能指標
為了更好地評價定位方法的性能, 需要建立合適的精度指標。 目前常用的指標有均方誤差(MSE)、 均方根誤差(RMSE)、 累積分布函數(CDF)、 克拉美羅下界(CRLB)等。
1)均方根誤差(RMSE)。在二維定位中坐標估計的均方誤差表示為
(14)
均方根誤差為
(15)
2)累積分布函數(CDF)。累積分布函數是用來統計在一定范圍內定位誤差出現概率, 通常可表示為
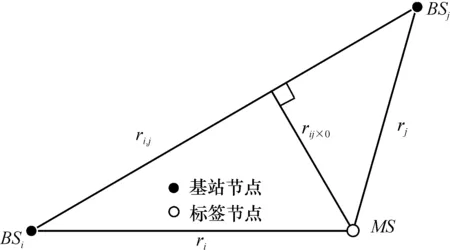
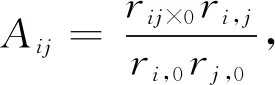
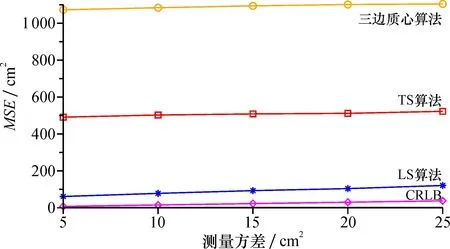
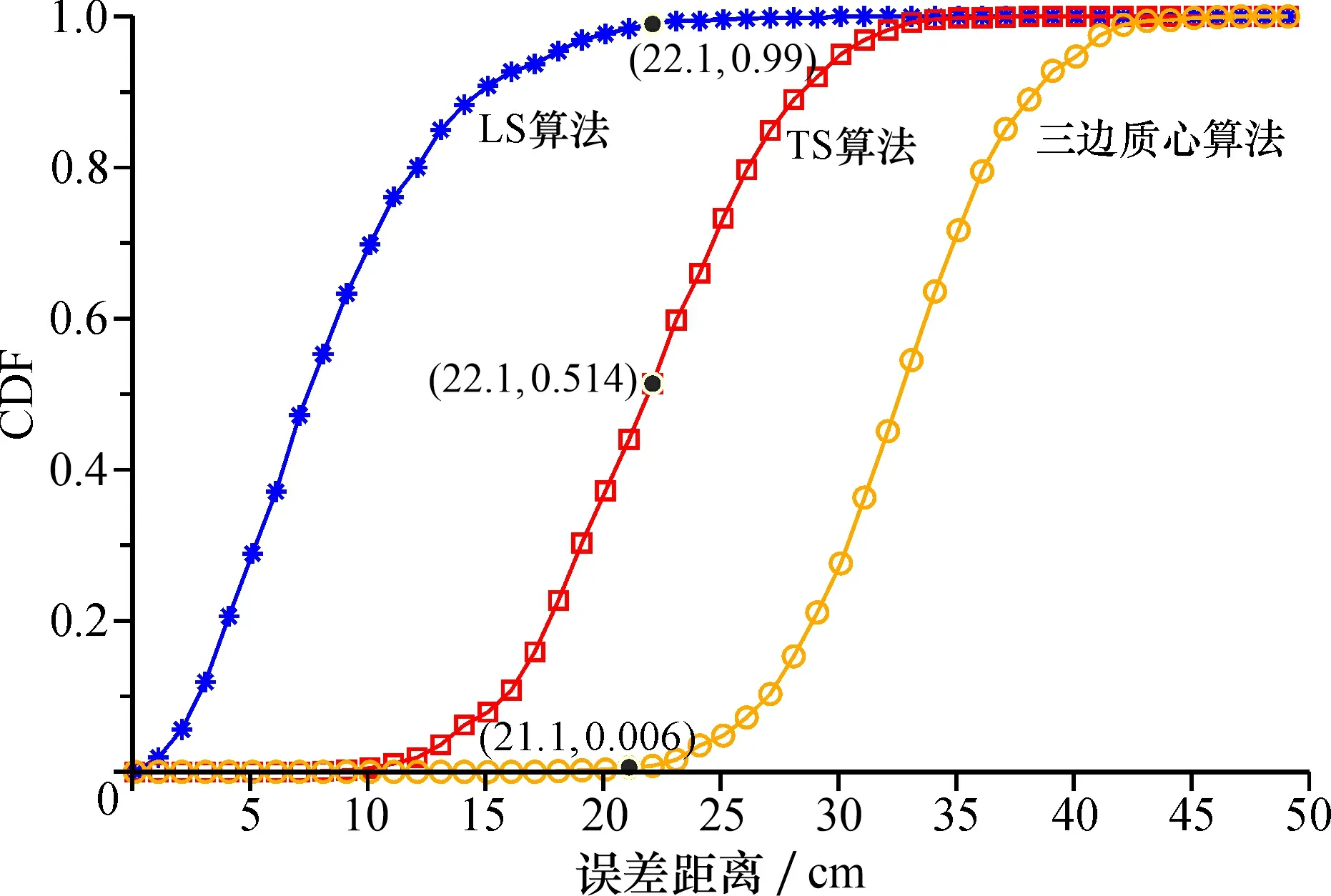
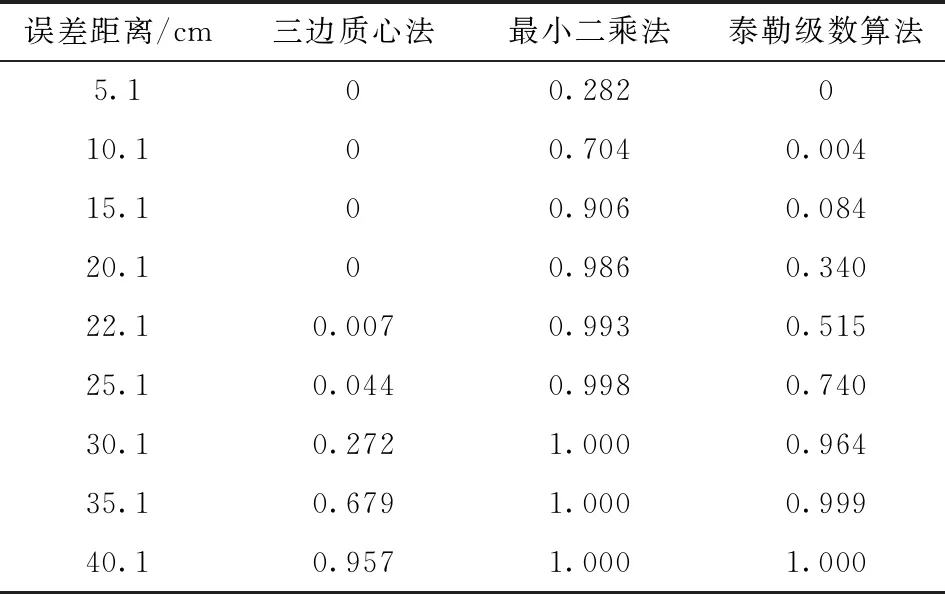
F(x)=P(X (16) 其中:x表示某個定位誤差,P(X 3)克拉美羅下界(CRLB)。在參數估計問題中, 采用CRLB為無偏估計量方差的下界, 即方差不可能小于此下界, 在定位研究中通常用MSE與CRLB進行比較。 (17) (18) 其中,I(θ0)是關于θ0的費舍爾信息矩陣(FIM)。 (19) (20) 由式(19)和 (20)可得 (21) (22) (23) (24) 其中,Aij為基站i到基站j的幾何狀態(圖5), 其物理意義為 圖5 Aij的幾何示意圖 (25) 其中:ri,j表示基站i到基站j之間的距離;rij×0為三角形高。由式(24)可知定位精度不僅與測距噪聲大小有關還與基站分布有關。 在NLOS環境下, 定位區域定義為200 cm×300 cm, 基站坐標分別為BS1(0,0)、BS2(200,0)、BS3(0,300), 定位標簽坐標為MS(100,150)。假設NLOS誤差是服從均勻分布, 誤差范圍為(10,20)cm。采用均方誤差、 累積分布函數、 克拉美羅下界3個指標進行評, 評價對象為三邊質心算法、 LS算法以及TS算法3種定位算法。圖6是NLOS測量誤差方差為5、 10、 15、 20、 25時, 3種算法進行1 000次定位后的平均MSE與CRLB比較。圖7是測量誤差方差為15 cm2時, 3種定位算法的CDF圖。 圖6 NLOS環境下3種定位算法平均MSE與CRLB對比 圖7 NLOS環境下3種定位算法的CDF圖 由圖6可看出, LS定位算法的MSE與CRLB差值最小, 說明算法的魯棒性較高。而由圖7和表1可以看出LS定位算法在NLOS誤差的方差為15 cm2情況下得到CDF相比較其他算法性能表現最好, 小于誤差距離22.1 cm的概率達到了0.993; 而同等條件下, TS定位算法概率為0.515, 三邊質心定位算法概率僅為0.007。在NLOS定位場景下, LS定位算法定位精度最高, TS定位算法定位精度次之, 三邊質心算法定位精度最差, 說明NLOS誤差對LS定位算法的定位精度影響較小。 表1 NLOS環境下3種定位算法的CDF 為了實現NLOS環境下UWB節點定位, 本文給出了采用基于TOA的DS-TWR測距算法和LS定位方法相結合的實現方法, 并采用仿真的方法進行了驗證。實驗結果表明, 相對于其他方法, 本文采用的測距和定位方法在精度上有所提高, 但算法的復雜度較高, 算法的實時性有待進一步提升。下一步工作將針對NLOS誤差變化導致UWB節點定位精度下降的問題, 采用模糊推理的方法以緩解NLOS誤差, 從而達到減少定位誤差的目的, 同時提高算法的實時性。


3 實驗仿真與結果分析
4 結束語
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18考試與評價·高一版(2020年6期)2020-11-02 02:45:24兒童故事畫報(2019年5期)2019-05-26 14:26:14中國生殖健康(2019年3期)2019-02-01 06:12:26Coco薇(2016年2期)2016-03-22 02:42:52鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25海軍航空大學學報(2015年3期)2015-11-11 17:20:00Coco薇(2015年1期)2015-08-13 02:47:34小雪花·成長指南(2015年7期)2015-08-11 15:03:12小雪花·成長指南(2015年4期)2015-05-19 14:47:56
