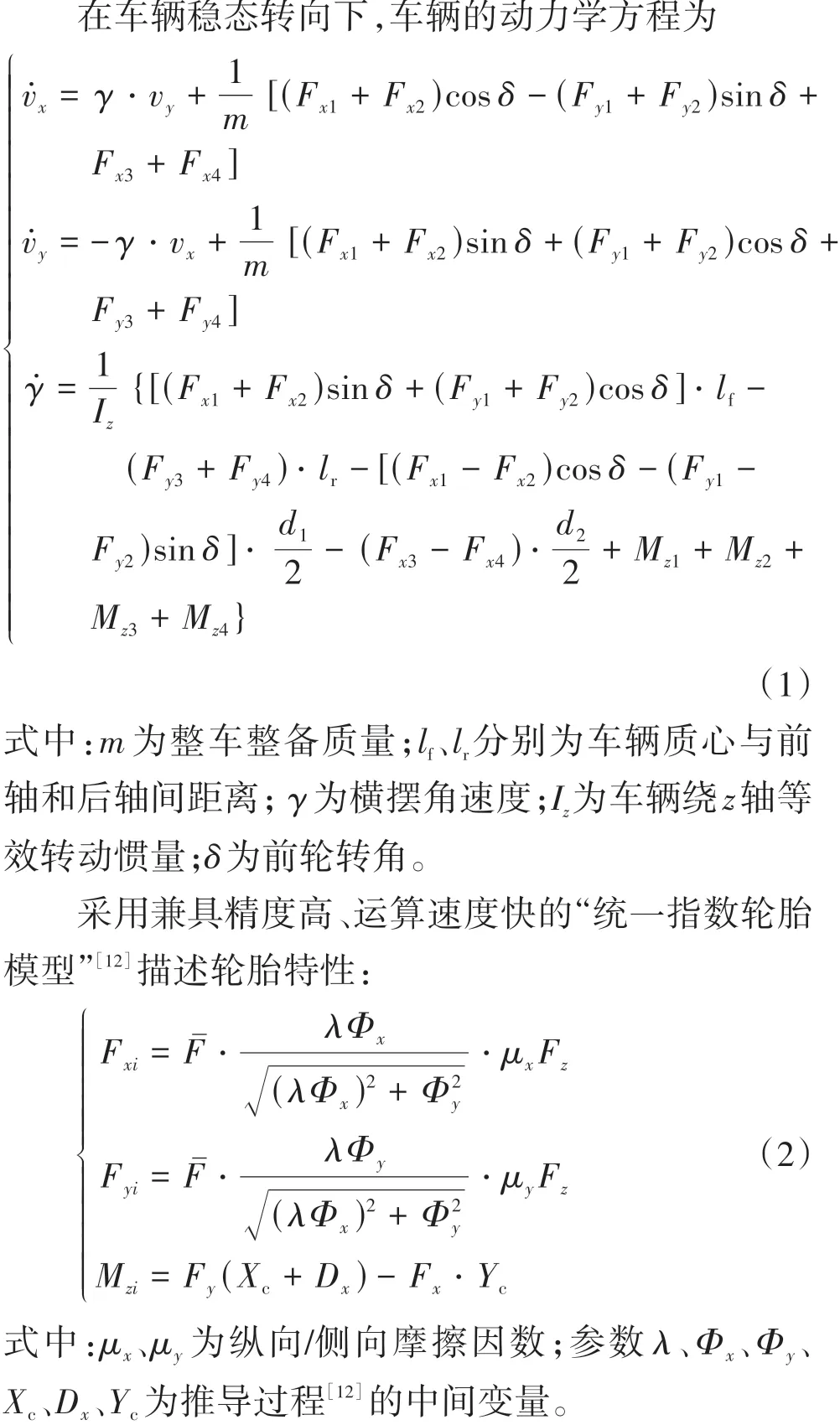
緊急避撞工況下駕駛員異常行為檢測*
2022-04-07 03:31:38趙治國胡昊銳陳曉蓉
汽車工程 2022年3期
趙治國,李 園,胡昊銳,王 鵬,陳曉蓉
(同濟大學汽車學院,上海 201804)
前言
據統計我國每年因交通事故死亡的人數超過10萬,93%以上的交通事故是由于駕駛員操作失誤導致的。尤其在緊急避撞工況下,駕駛員需在短時間內做出反應,更有可能出現誤操作或操作不當等異常駕駛行為,嚴重影響行車安全。及時檢測和發現駕駛員異常行為并進行預警或糾正,則可最大程度降低碰撞事故的發生率或避免事故發生。
當前駕駛員異常行為檢測方法大致可劃分為兩類:基于車載傳感器對車輛狀態的檢測和基于機器視覺對駕駛員生理信息的檢測。前者利用車載傳感器監測車輛狀態進而對駕駛員異常行為進行判斷,其需要建立車輛狀態與駕駛危險行為的映射關系。Caliendo等通過GPS、毫米波雷達以及單目攝像頭等傳感器獲取自車軌跡數據以及車間相對距離信息,制定駕駛員異常行為判別規則,但由于響應延遲和計算時間的約束難以滿足時效性的要求。林慶峰等基于追尾碰撞中的駕駛員制動操作行為與車輛狀態的關系,利用Fisher判別分析法建立了駕駛員異常操作預警算法。Xiang等提出車輛估計狀態與乘客主觀感受結合的駕駛行為評價模型,但該方法受傳感器精度和狀態估計精度的影響較大,會因不同乘客主觀感受的差異影響識別的準確性。薛清文等通過提取交叉路口的高精度軌跡數據,利用輕量梯度提升機算法對駕駛員行為識別,但是此方法需要大量真實高精度軌跡數據,對控制器的計算能力有較高要求。可見,基于車載傳感器對車輛狀態的檢測方法雖對多變工況有較強的拓展能力,但由于駕駛行為到車輛響應存在延時,該類方法很難實現實時檢測和提前預警。后者則基于深度學習和機器視覺,利用神經網絡對駕駛員異常行為進行檢測。劉明周等采用基于機器視覺的Adaboost算法檢測面部以及手部的區域,以提取到的特征點參數作為輸入,疲勞等級作為輸出訓練BP神經網絡模型,完成駕駛員疲勞程度的檢測。Wang等通過Fisher分類器檢測駕駛員嘴部像素區域,以嘴部的幾何特征組成特征向量,訓練BP神經網絡實現對駕駛員異常狀態的識別。Bajaj等基于Android系統利用攝像頭采集駕駛員面部表情,通過神經網絡實現對駕駛員的嗜睡行為的高精度檢測。陳驥馳等和Gao等提出一種基于腦網絡特征的疲勞檢測方法,通過可穿戴設備采集駕駛員腦電波信號,用以檢測駕駛員的疲勞程度。可見,基于機器視覺對駕駛員生理信息的檢測方法,能夠滿足對檢測結果時效性的要求,但成本較高且接觸性設備會對駕駛員正常駕駛產生影響,同時視覺檢測對環境要求苛刻,在圖像背景、角度、光照以及工況存在差異的情況下識別準確率較低且魯棒性差,在實際應用中仍存在一定的困難。
綜上,目前駕駛員異常行為檢測方法普遍存在滯后性、受環境影響大等問題,且多數研究停留在駕駛員疲勞監測層面。本文中提出了綜合轉向盤轉角殘差序列和相平面圖判斷的異常駕駛行為檢測方法,在車輛穩定狀態下,可在車輛偏離正常軌跡前實現對駕駛員異常行為的檢測。首先,通過相平面圖確定車輛穩定性;其次,建立基于MPC的參考駕駛員模型,構造實際駕駛操作與駕駛員模型參考輸入間的轉向盤轉角殘差序列;再者,計算駕駛員異常行為因子和評價函數;最后基于評價函數及其閾值關系實現對車輛偏離預期行駛軌跡的異常行為檢測。
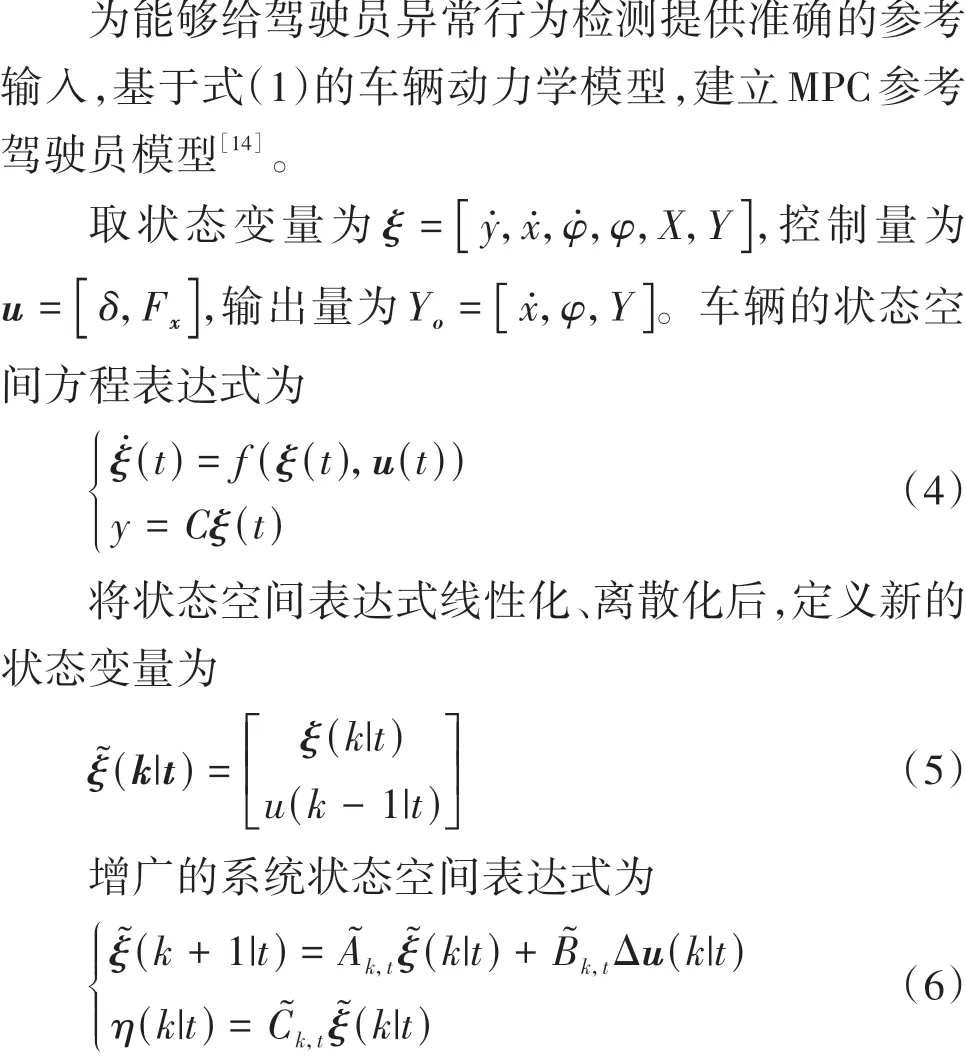
1 基于MPC的參考駕駛員模型
為得到在緊急避撞工況下駕駛員操縱轉向盤的轉角參考輸入,基于Sigmoid函數規劃參考路徑,搭建車輛動力學模型并基于此建立MPC參考駕駛員模型,如圖1所示。

圖1 駕駛員模型控制流程圖
1.1 車輛7自由度模型
基于某四驅混合動力轎車研究平臺,搭建7自由度車輛動力學模型,綜合反映車輛動力學特性。車輛的受力分析如圖2所示,輪胎縱向力、側向力和 回 正 力 矩 分 別 為F、F、M,前 后 輪 距 為d和d。
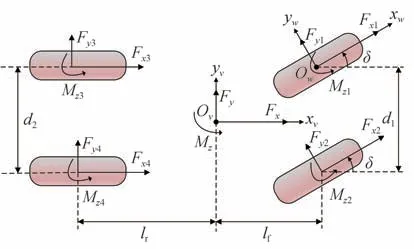
圖2 車輛受力分析圖
1.2 基于Sigmoid函數的避撞路徑
基于Sigmoid函數的路徑規劃方法可以綜合反映避撞工況下避撞物理極限和碰撞時間(time to collision,TTC)約束,同時具有計算速度快與實時性好的特點。
Sigmoid曲線轉向避撞參考路徑表達式為

式中a、c、d為曲線形狀參數,其物理含義如圖3所示。

圖3 避撞路徑Sigmoid曲線
參數a:物理含義為避撞轉向行為的劇烈程度。路徑的最大斜率為ad/4,在參數d一定時,a越大則避撞轉向行為越劇烈。
參數c:物理含義為參考路徑斜率最大值處的縱向位置,當c減小時,曲線前移至曲線②位置處;當c增大時,曲線后移至曲線③位置處。
參數d:物理含義為路徑橫向目標位移,一般取值為國家標準確定的道路寬度,即d取3.5 m。
1.3 基于MPC的參考駕駛員模型

2 緊急避撞工況下駕駛員異常行為檢測
在緊急避撞工況下,駕駛員會因為緊張導致操作不當而無法成功避撞,如圖4所示。轉向時駕駛員的異常行為主要分為以下兩類:一類為駕駛員異常操作導致車輛失穩,無法完成避撞,該失穩狀態通常以相平面法檢測;另一類為車輛穩定狀態下駕駛員異常操作導致車輛偏離正常行駛軌跡,車輛與障礙物或道路邊界發生碰撞。
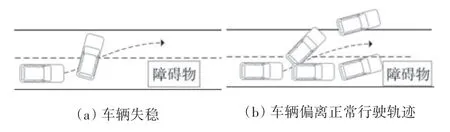
圖4 駕駛員異常行為類別分析
本文中所提出的駕駛員異常行為檢測方法如圖5所示。先基于相平面法判斷車輛穩定性,之后構造基于實際駕駛員與參考駕駛員模型之間的轉向盤轉角殘差序列,通過殘差統計特征引入駕駛員異常行為因子對駕駛員偏離正常行駛軌跡的異常行為進行檢測。
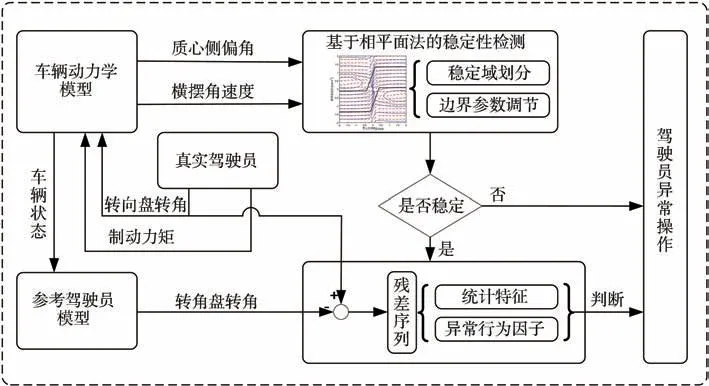
圖5 分層的駕駛行為檢測方法
2.1 基于相平面法的車輛穩定性判斷
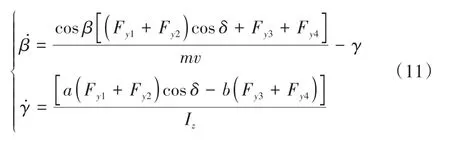
采用相平面法對車輛穩定性進行判斷,基于式(1)和式(2)建立的動力學模型,當前輪轉角固定時,非線性單軌2自由度模型的2階自治系統為

在相平面軌跡圖的基礎上,通過直線擬合確定相平面穩定區域邊界。以μ=0.8、v=60 km/h、δ=0°的相平面圖為例,如圖6所示,選取A(x,y)、B(x,y)、C(x,y)、D(x,y)4個點作為特征點描述穩定區域邊界,黑色折線上邊界為H,下邊界為H,H與H之間即為穩定區域,其余則為非穩定區域。上邊界可用式(12)所示的分段函數表示。同理,可由C點和D點坐標計算下邊界表達式H(β)。
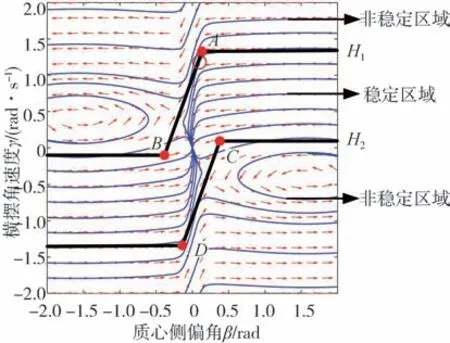
圖6 車輛β-γ穩定區域劃分示意圖
避撞行駛過程前輪轉角與車速始終變化,根據不同情況下相平面確定穩定邊界,建立如圖7所示的A、B、C、D各點橫、縱坐標關于車速與前輪轉角的坐標MAP圖。
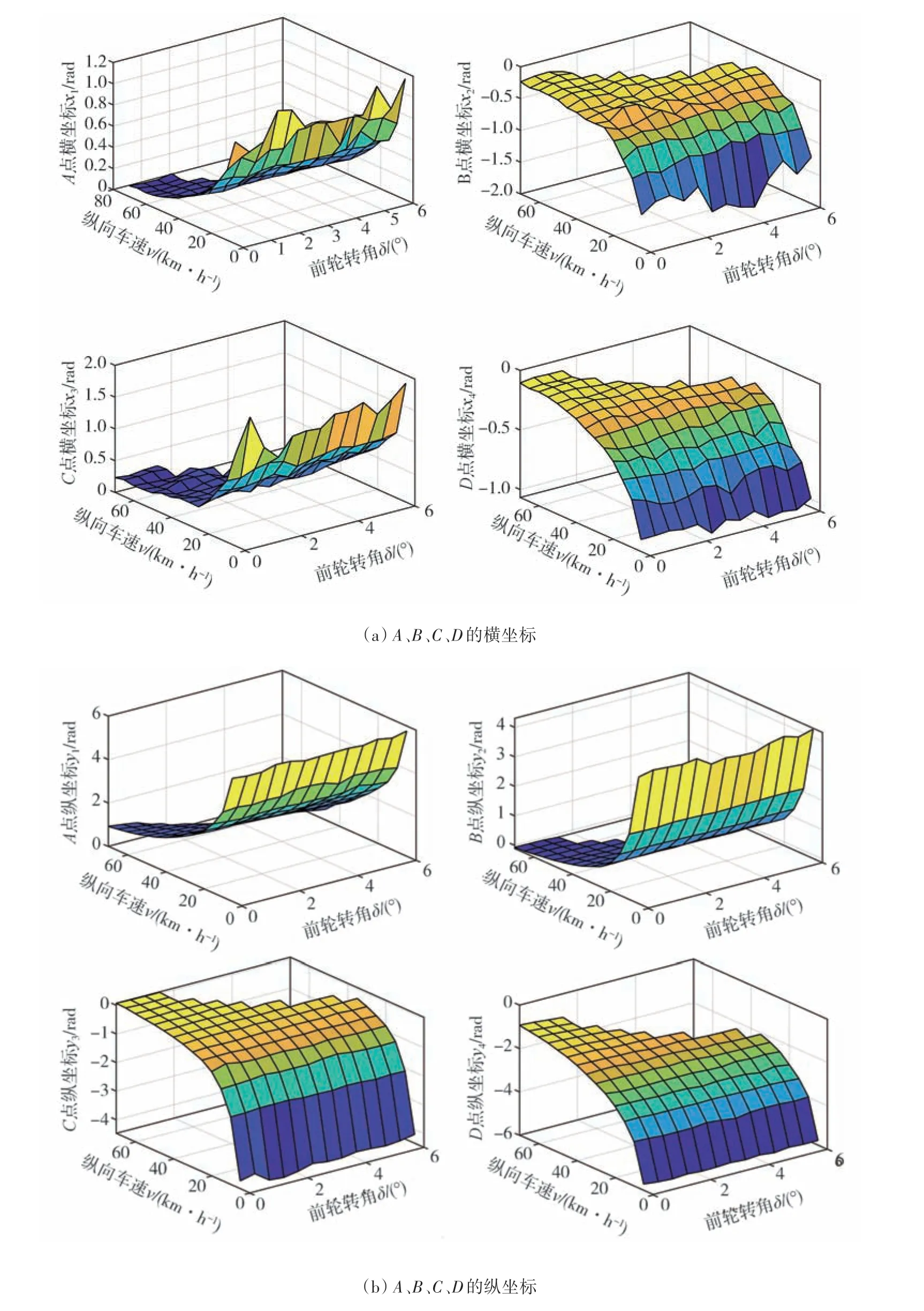
圖7 各特征點坐標MAP
2.2 軌跡偏離駕駛員異常行為檢測
構造實際駕駛員轉向盤轉角與參考駕駛員模型輸出轉角的殘差為

式中:δ(t)為駕駛員轉向盤轉角;δ(t)為參考駕駛員轉向盤轉角。
傳統殘差序列診斷方法僅根據殘差與標定閾值的關系進行判斷,缺少對殘差變化率的考慮。本文提出考慮轉向盤轉角殘差變化率的駕駛員異常行為因子AF,用于描述駕駛員偏離正常行駛軌跡的異常行為:

以δ(t)>0為例,說明AF的具體意義:
當r(t)=0時,AF為0,當前時刻駕駛員與參考駕駛員輸出一致。


由以上分析可知,當不穩定狀態加劇時,始終有AF>0。同理,δ(t)<0時也有類似結論。
駕駛員異常行為因子AF大于零的區間定義為駕駛員異常行為因子特征序列,基于此區間內AF值的變化可預見最大橫向位移誤差。
定義評價函數J以描述駕駛員偏離正常行駛軌跡的異常程度:

式中t、t分別為駕駛員異常行為因子AF大于零區間的起始時刻和終止時刻。
當J超出閾值J時,認為駕駛員出現偏離正常行駛軌跡的異常行為,即滿足:

車輛橫向位移誤差大于0.4 m時視為偏離目標軌跡。圖8采用人為設計偏差路徑的方法對J值進行標定,藍色曲線為期望路徑,紅色曲線為在期望路徑的基礎上疊加±0.4 m橫向位移誤差后的路徑,誤差路徑在縱向上的持續位移為Δx=v·t,其中v為車速,t為駕駛員預瞄時間。
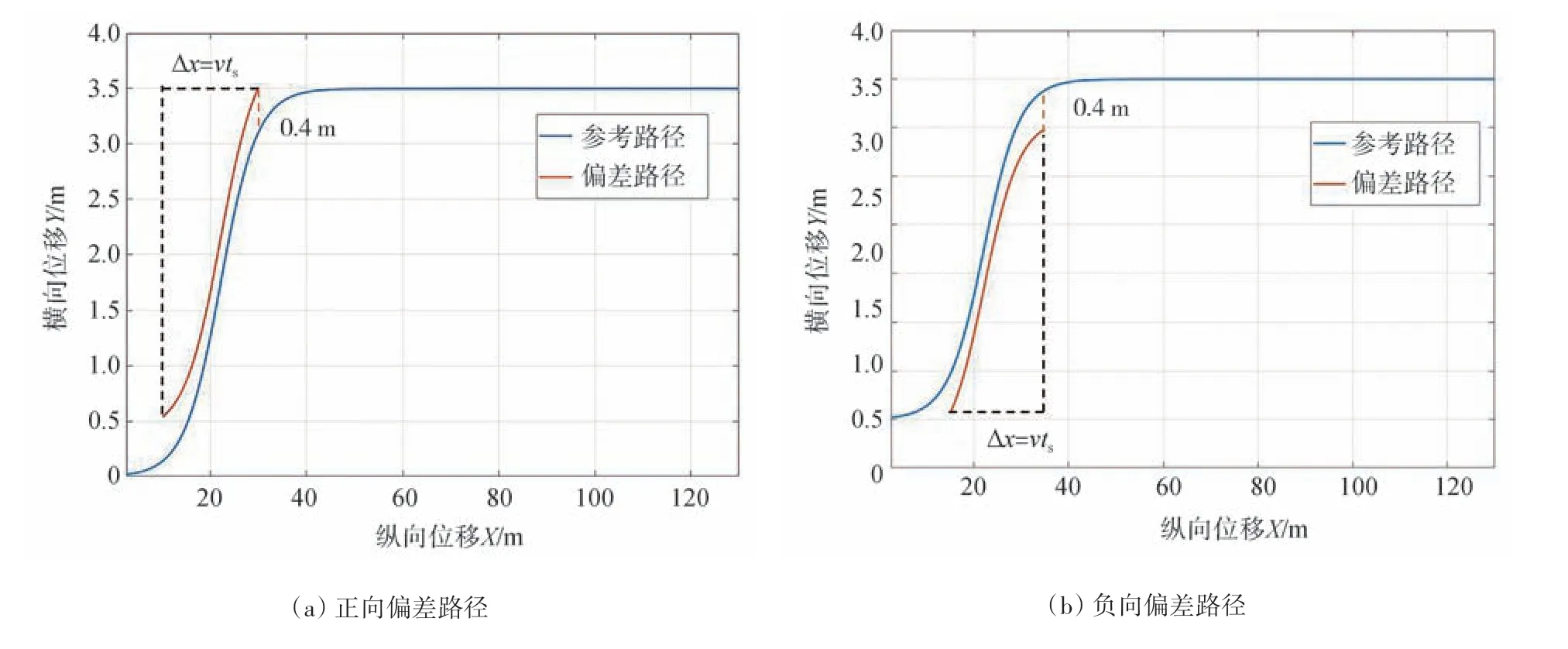
圖8 偏差路徑設計示意圖
考慮到閾值與車輛的速度和縱向位置相關,在不同車速和縱向位置下設置偏差路徑進行標定,評價函數閾值J關于車速及縱向位置的三維MAP如圖9所示。
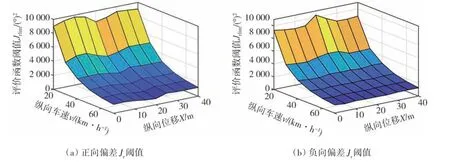
圖9 評價函數J r閾值
取正向和負向偏差閾值的均值作為J閾值進行駕駛員偏離正常行駛軌跡異常行為檢測。
綜上,基于轉向盤轉角殘差序列的駕駛員異常行為檢測方法如圖10所示。
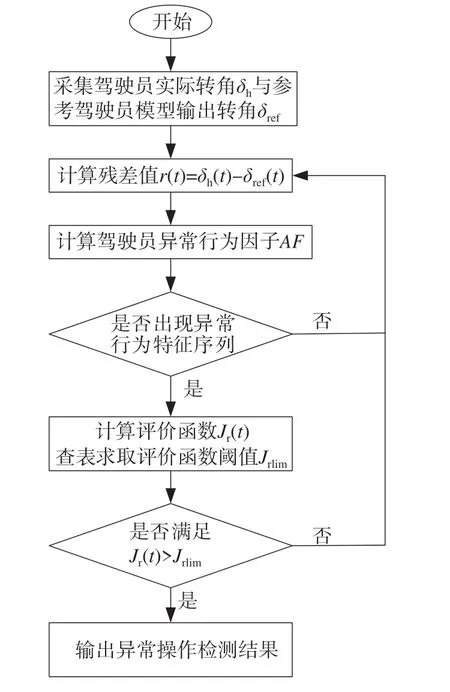
圖10 基于駕駛員模型的異常行為檢測
3 仿真分析
為驗證文中所提出MPC的參考駕駛員模型以及駕駛員異常行為檢測方法的有效性,搭建CarSim/Simulink聯合仿真平臺進行仿真試驗。選取初速度60 km/h、避撞距離30 m作為初始條件;路面附著系數μ=0.8;Sigmoid曲線參數為:a=0.2626,d=3.5,c=22.1250;基于防側翻速度約束,確定目標速度為49.68 km/h。
3.1 基于MPC的參考駕駛員模型仿真結果
緊急避撞路徑跟蹤仿真結果如圖11所示。圖11(a)中粉色虛線為避撞參考軌跡,藍色曲線為車輛實際軌跡,紅色矩形為障礙,黑色點劃線為車輛行駛邊界包絡線,障礙距離包絡線邊界最近距離為1.03 m。圖11(b)和圖11(c)表明,避撞過程轉向盤轉角平滑,未出現抖動以及明顯超調,具有較好的轉向頻度,參考駕駛員模型首先輸出制動力,使車輛減速,當出現車速超調后,決策輸出驅動力以使車輛跟隨目標車速。圖11(d)為車速跟隨情況,避撞過程中車輛首先減速至低于安全目標車速,避撞結束后速度收斂于目標車速。圖11(e)中車輛橫向位移誤差可控制在±0.12 m范圍內;圖11(f)中車輛航向角跟蹤誤差可控制在±0.06 rad范圍內,滿足路徑跟蹤控制的精度要求。
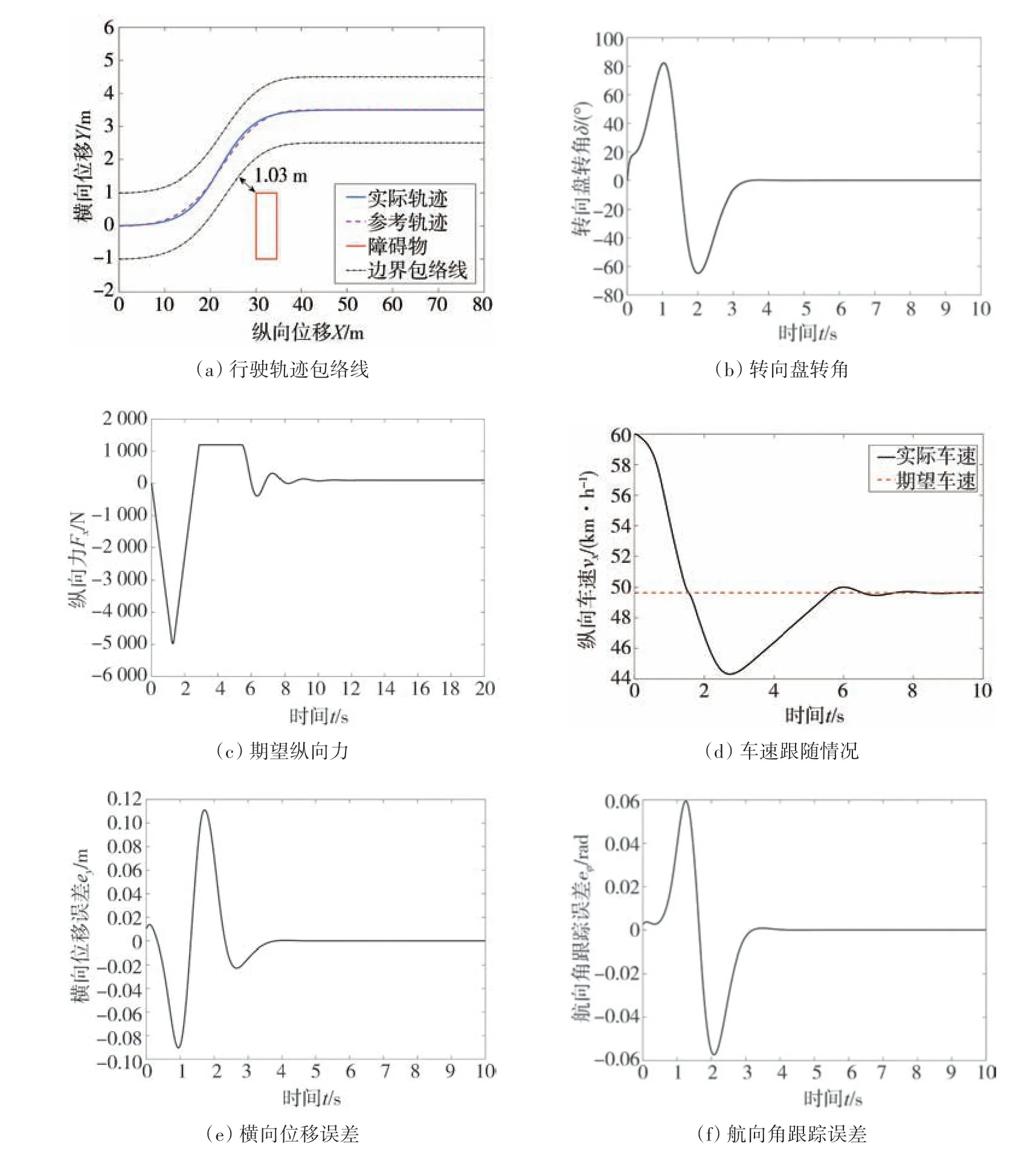
圖11 緊急避撞路徑跟蹤仿真結果
綜上,文中建立的參考駕駛員模型在橫、縱向控制層面表現優異,能夠快速收斂至目標速度和目標軌跡,且有較高的跟蹤精度。
3.2 駕駛員異常行為檢測方法仿真結果
駕駛員異常行為檢測仿真結果如圖12所示。車輛在回正階段由于操作失誤未回到車道中心線。由圖12(b)可知,駕駛員在避撞過程中轉向遲疑且轉幅不足。圖12(c)中異常行為因子AF>0,檢測到駕駛員異常行為特征片段。圖12(d)和圖11(e)表明,初始階段評價函數J并未超出閾值且橫向位移誤差小于0.4 m;在t=4.64 s時J超出閾值限制,此時檢測出駕駛員異常行為,車輛橫向位移誤差僅為-0.20 m,未偏離正常行駛軌跡;橫向位移誤差在t=5.10 s時達到閾值-0.4 m,在t=5.48 s時達到極值點-0.58 m,故所提出的異常行為檢測方法可以提前于車輛偏離參考軌跡0.46 s檢測到駕駛員異常操作,提前于橫向位移誤差極值點出現時刻0.84 s檢測到駕駛員異常操作。圖12(f)為車輛穩定性相圖,車輛始終處于穩定相軌跡區域,未發生失穩情況。
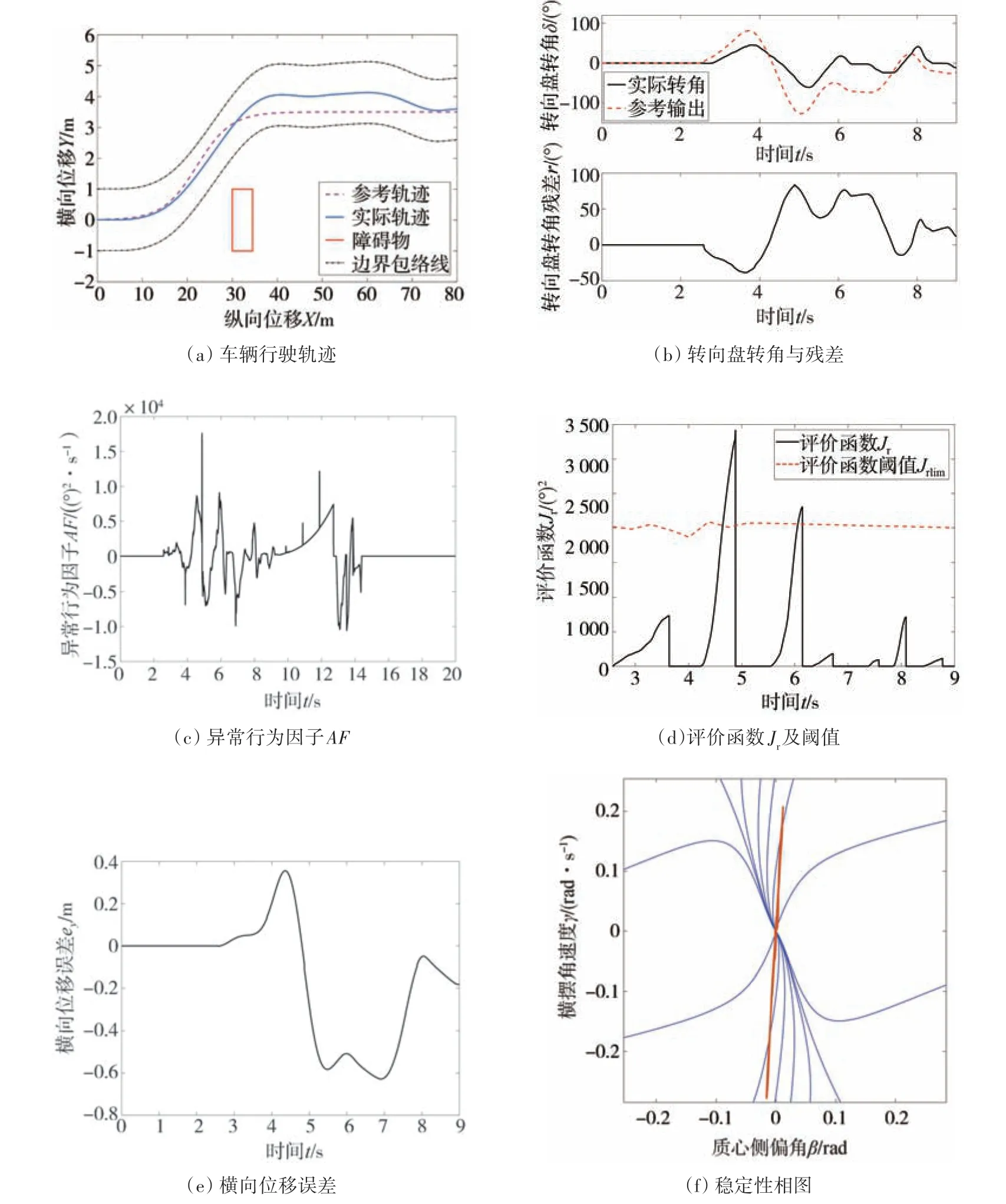
圖12 駕駛員異常操作檢測仿真結果
綜上,文中所提出的駕駛員異常行為檢測方法能夠在車輛偏離預設軌跡前檢測出駕駛員異常行為。
4 硬件在環仿真試驗
為進一步驗證提出的駕駛員異常行為檢測方法的可行性,在自主搭建的緊急避撞駕駛輔助試驗臺架進行硬件在環仿真試驗。臺架結構如圖13所示,該平臺由EPS轉向系統臺架、液壓制動系統臺架、MicroAutoBox快速原型控制器、駕駛模擬器和計算機等組成。在Carsim/Simulink聯合仿真平臺搭建車輛模型和視景界面,通過駕駛員在環實現仿真測試。
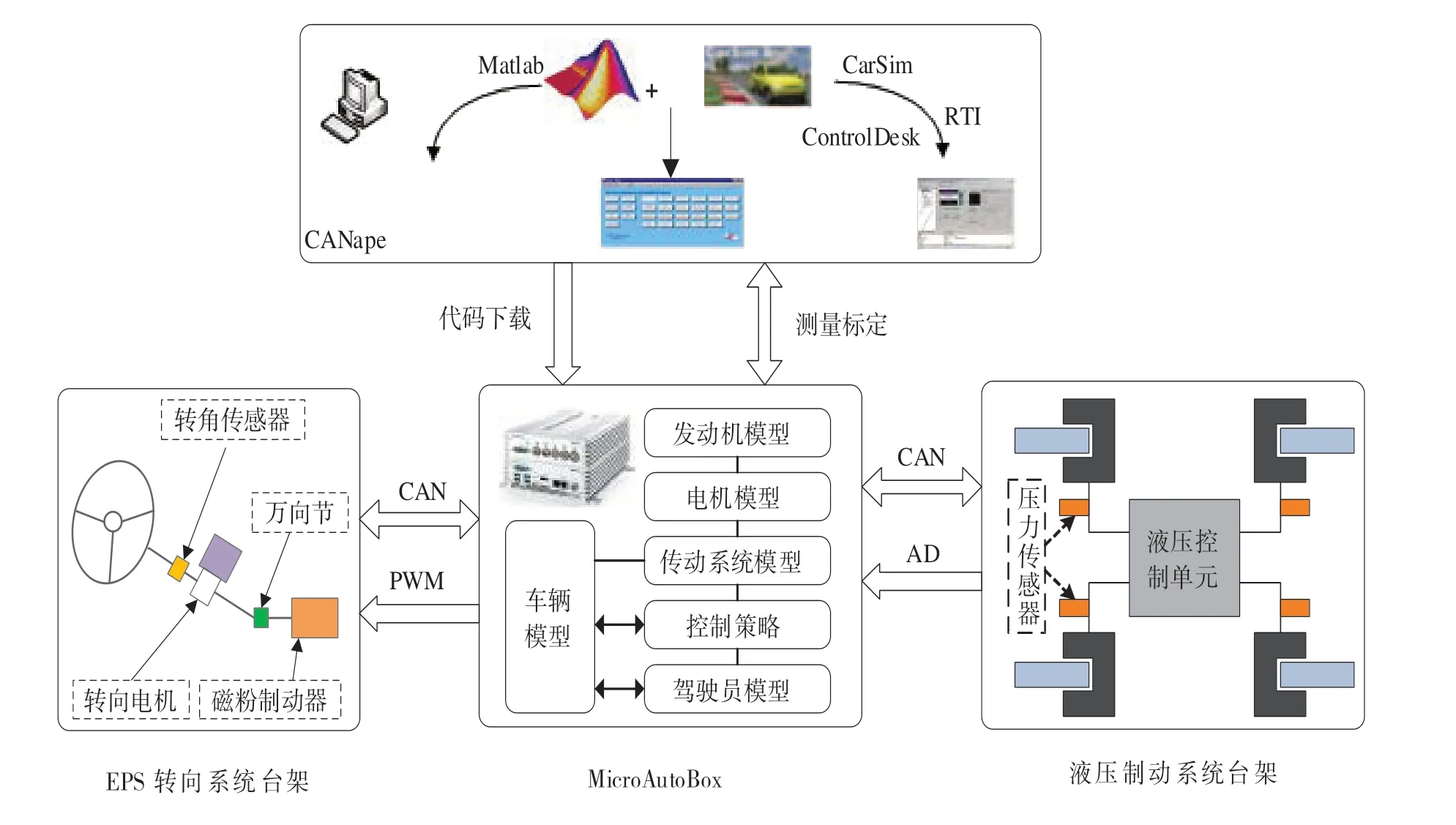
圖13 緊急避撞駕駛輔助臺架結構圖
針對緊急避撞工況,選取3種典型異常行為(轉向遲疑、轉向過度、回正不足)檢測驗證該方法的有效性,試驗場景如圖14所示。

圖14 硬件在環仿真試驗場景
4.1 轉向遲疑異常行為
圖15 為轉向遲疑異常駕駛操作檢測結果。駕駛員由于緊張導致緊急避撞時未及時做出反應,車輛實際軌跡相對于參考軌跡存在一定滯后。轉向開始后異常行為因子AF即大于0,檢測到駕駛員異常行為特征片段,在t=3.35 s時J超出閾值,檢測出駕駛員異常行為,此時車輛橫向位移誤差僅為0.06 m,未偏離正常軌跡。橫向位移誤差在t=3.88 s時達到閾值0.4 m,在t=4.58 s時達到最大值1.25 m。結果表明,所提出的異常行為檢測方法可以提前于車輛偏離參考軌跡0.53 s識別到駕駛員異常行為,可以提前于最大橫向位移誤差出現時刻1.23 s識別到駕駛員異常行為。圖15(f)車輛穩定性相圖表明,車輛未發生失穩。
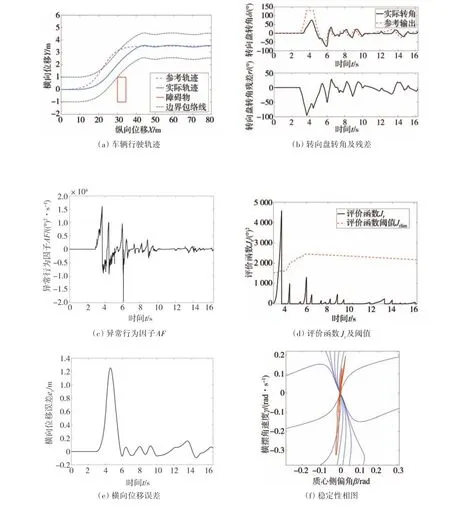
圖15 轉向遲疑異常行為識別結果
4.2 轉向過度異常行為
圖16為轉向過度異常駕駛操作檢測結果。在避撞初始階段駕駛員反應激烈導致轉向過度。在t為2.79~3.65 s時出現明顯的異常行為特征片段,于t=2.99 s時J超出閾值,檢測出駕駛員異常行為,此時車輛橫向位移誤差僅為-0.005 m,未偏離正常軌跡。橫向位移誤差在t=3.51 s時達到閾值-0.4 m,在t=4.79 s時達到最大值-1.48 m,該場景下所提出的異常行為檢測方法可以提前于車輛偏離參考軌跡0.52 s識別到駕駛員異常行為,可以提前于最大橫向位移誤差出現時刻1.8 s識別到駕駛員異常行為。圖16(f)車輛穩定性相圖表明,車輛未發生失穩。
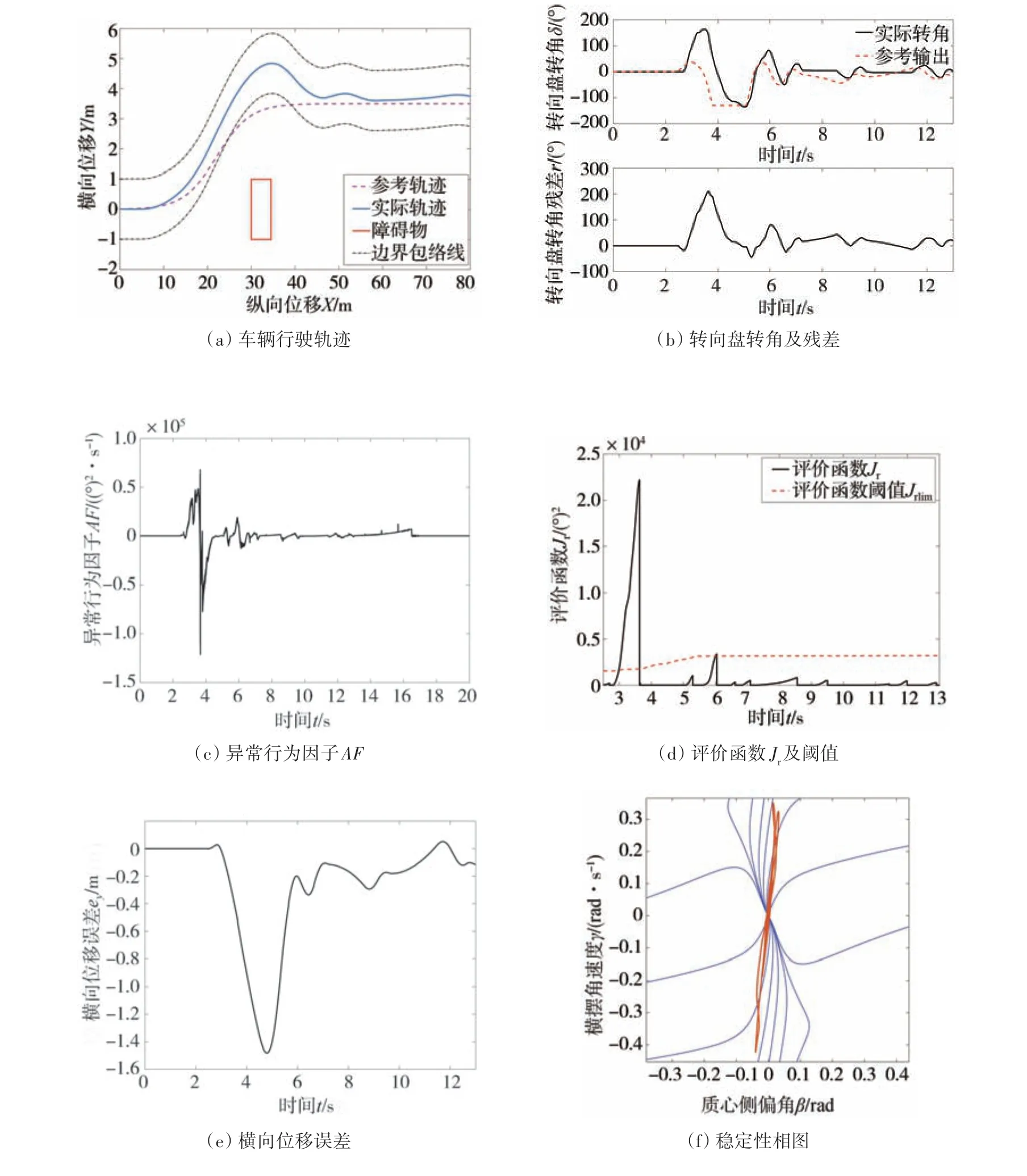
圖16 轉向過度異常行為識別結果
4.3 回正不足異常行為
圖17為回正不足異常駕駛操作檢測結果。在避撞回正階段駕駛員未能及時回正,導致車輛與參考軌跡出現較大偏差。在轉向避撞初始階段,t為3.8~5 s,駕駛員操作與參考轉向盤轉角基本相同,異常行為因子在t為5~5.79 s轉向回正階段出現明顯的異常行為特征片段。于t=5.41 s時J超出閾值,檢測出駕駛員異常行為,此時車輛橫向位移誤差為0.29 m,未偏離正常軌跡。橫向位移誤差在t=5.95 s時達到閾值-0.4 m,在t=6.61 s時達到最大偏差-0.97 m,該場景下所提出的異常行為檢測方法可以提前于車輛偏離參考軌跡0.54 s識別到駕駛員異常行為,可以提前于最大橫向位移誤差出現時刻1.2 s識別到駕駛員異常行為。圖17(f)車輛穩定性相圖表明,車輛未發生失穩。
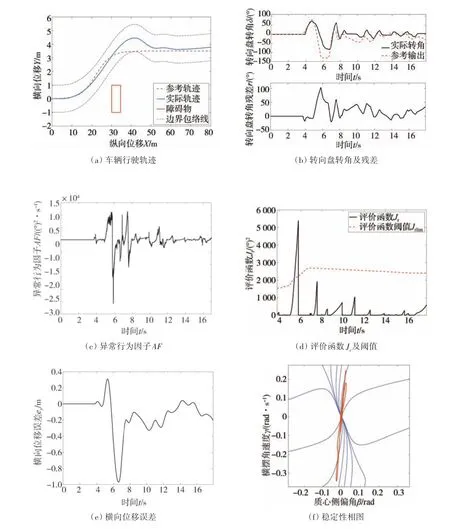
圖17 回正不足異常行為識別結果
通過以上試驗結果分析可知,本文中所提出的駕駛員異常行為檢測方法可對異常駕駛操作進行檢測,且可至少提前于車輛發生偏離正常軌跡前0.5 s檢出駕駛員異常行為。
5 結論
(1)針對緊急避撞工況下駕駛員異常行為檢測問題,提出了綜合轉向盤轉角殘差序列和相平面圖判斷的異常駕駛行為檢測方法。先基于相平面法分析車輛避撞工況下的穩定狀態,之后在未失穩工況下構造基于實際駕駛員操作與參考駕駛員模型輸出的殘差序列,定義了駕駛員異常行為因子AF和評價函數J,實現對駕駛員異常行為的檢測。
(2)搭建了CarSim/Simulink聯合仿真平臺,使用采集的緊急避撞駕駛數據進行仿真,結果表明:所提出的駕駛員異常行為檢測方法可提前車輛偏離正常行駛軌跡前0.46 s識別出異常駕駛操作。
(3)自主搭建緊急避撞駕駛輔助臺架,對駕駛員異常行為檢測方法的有效性進行駕駛員在環驗證。結果表明:所提出的駕駛員異常行為檢測方法可以至少提前于車輛偏離正常行駛軌跡0.5 s對轉向遲疑、轉向過度、回正不足的異常駕駛操作成功檢測,硬件在環試驗進一步驗證了所提出的駕駛員異常行為操作檢測方法的有效性。
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
海峽科技與產業(2016年3期)2016-05-17 04:32:12
公民與法治(2016年4期)2016-05-17 04:09:26
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56