無人機管理技術在公路建設的應用探討
2022-04-07 09:25:12祁宇超李全林
福建交通科技 2022年1期
■祁宇超 李全林 孫 梅
(新疆興亞工程建設有限公司, 昌吉 831100)
無人機技術已在不同領域得到諸多創(chuàng)新性應用,其使用場景仍在不斷拓展,在工程建設領域同樣也有廣泛的應用空間。 在高等級公路的施工及運營領域已有部分無人機應用場景, 但主要作為宣傳及拍攝涉手段,并未與公路建設工程管理直接掛鉤,對收集到的數據信息也未進行系統(tǒng)處理及應用。
依托無人機的超低空遙感技術囊括了VR 增強、機械視覺、3S 以及機器人等專業(yè),利用硬件設備搭載的高光譜、紅外、可見光傳感器,獲取光譜、溫度及空間數據, 經信息化處理后形成3D 數字信息模型,可與工程建設設計、施工環(huán)節(jié)高度融合。 例如在測繪過程中可將IMU 單元、GPS 接收單元以及航測相機搭載在無人機上,以遙感結合攝影測量的方法得以實現(xiàn)[1]。 依托數據處理應用平臺,將無人機技術獲取的數字信息模型與公路建設管理要求、管理對象相鏈接,達到施工數字化、可視化管理目標。
在公路建設領域應用基于超低空遙感技術的無人機管理方法, 能高效率實現(xiàn)地形地貌采集、公路建設進度把控,同時對工程建設環(huán)境保護等情況進行收集應用。 系統(tǒng)化管理公路建設質量、進度及工程量計量等環(huán)節(jié),提升公路建設管理水平,為管理者提供高效、直觀、便捷的體驗,也為公路建設管理體系開拓出創(chuàng)新性思路,實現(xiàn)產業(yè)升級。
1 技術應用要點
無人機管理技術應用過程的實現(xiàn)包含三大部分:項目外業(yè)數據收集、數據信息化處理(包含模型搭建)、模型場景應用。
利用高清拍攝設備拍攝獲取公路建設項目現(xiàn)場數據,經信息化處理后搭建3D 數字信息模型,依托該模型再做多種形式的技術應用。
1.1 項目外業(yè)數據收集
(1)進行公路建設項目現(xiàn)場外業(yè)數據收集前須先明確收集區(qū)域, 在已明確的區(qū)域內設置控制點。利用無人機初步觀測采集區(qū)地質地貌條件后,用專用油性標記紙在標志性地物處進行鋪設(圖1)。 針對帶狀分布的數據收集區(qū)域,控制點應按照S 形特征在其左右雙側進行布設, 其布設密度不宜少于3 點位/km,尤其是在地勢起伏變化明顯時酌情進行加密設置[2]。 完成控制點布置工作后要利用GPS 或RTK 測量設備確認出每個控制點的精準坐標。
(2)按照外業(yè)數據收集區(qū)域邊界及對應的地形資料,在無人機地面端航線規(guī)劃軟件中規(guī)劃飛行任務。 結合公路建設項目特征,靈活調整無人機飛行參數設定,包括無人機拍攝間隔、航向重疊度、航行速度、相對航行高度等指標。 在正式執(zhí)行無人機項目外業(yè)數據收集航行任務前,應確保航線、飛行參數以及無人機硬件設備的狀態(tài)均處于正常狀態(tài)。
1.2 數據信息化處理
無人機管理技術獲取的基礎數據須進行信息化處理,處理過程主要包括以下幾個方面:數據初始化、控制點刺點處理、3D 坐標求解、3D 信息化模型搭建[3]。
1.2.1 數據初始化
在數據處理過程中,提取并匹配利用無人機拍攝獲取影像數據的特征點位,得到相對較為稀疏的3D 點云模型。 利用該3D 點云模型,檢查驗證拍攝設備校正數據、特征點位提取情況與項目實體匹配度、拍攝數據完整度。
1.2.2 控制點刺點處理
利用前期控制點進行刺點處理,實現(xiàn)實體項目控制點3D 坐標信息的信息化平臺錄入, 作為進一步處理處理求解的基礎。
1.2.3 3D 坐標求解
利用所提的少量控制點坐標計算區(qū)域網平差情況,接著反求無人機拍攝影像的內方位元素點位以及外方位元素點位,從而求解區(qū)域各點位的數字3D 坐標。
1.2.4 3D 信息化模型搭建
基于3D 坐標點云加密, 通過信息化處理重構3D 網格紋理,進而搭建3D 信息化模型。 其中擬合公路建設項目區(qū)域地形得到地表數字信息化模型,即DSM;應用影像拼接技術,同時對正投影進行糾偏,獲取數字信息化正射影像圖,即DOM。
2 技術應用原理
2.1 3D 坐標點云及其模型
通過項目現(xiàn)場測量及無人機拍攝獲取的區(qū)域外觀表面點位的數據集合稱作3D 坐標點云。 結合測量及攝影理論可得到D 坐標點云及其模型,模型中可讀取RGB 色彩信息、XYZ 3D 坐標信息。 通過該模型能讀取并計算公路構筑物空間位置信息以及尺寸信息等。
2.2 地表數字信息化模型
DSM 地表數字信息化模型主要是通過地表各點位高程信息集合來表征公路建設項目區(qū)域的地表起伏狀態(tài)[4-5]。 利用該模型可以獲取工程項目斷面圖、透視圖等,實現(xiàn)輔助公路施工土石方計算、高程相關地貌信息分析以及表面覆蓋面積測算等功能。
2.3 數字信息化正射影像圖
DOM 數字信息化正射影像圖是基于無人機攝影影像和遙感影像,經像元糾偏后,按照設定的圖幅自動裁切獲取數據信息影像。 數據信息影響最大的特點是直觀性強,同時利用該模型可靈活便利地量測和判讀,包括量測面積、長寬幾何信息,判讀地表地形特性等[6]。
3 工程應用
3.1 質量管理
無人機靈活性強,可出入各種人工不易到達的復雜區(qū)域范圍,收集邊坡及橋梁數據,信息化處理后獲取DOM 及3D 模型,結合公路建設項目設計資料,可高效率分析路基邊坡平臺寬度、坡率及坡口線等工程質量把控狀況(圖2)。

圖2 邊坡質量分析情況
能對橋梁施工過程中的立柱、護筒中心點位等重要節(jié)點信息進行施工質量檢測(圖3),快速識別施工質量瑕疵,最大限度避免安全問題,減少經濟損失和人員傷亡。

圖3 橋梁質量分析情況
3.2 施工進度管理
利用無人機管理技術定期對公路施工區(qū)域進行巡航得到數字信息化正射影像,全面分析進度信息,包括形象進度展示、征地拆遷進度掌握、720 度實景圖生成以及5G 巡航功能實現(xiàn)等, 為管理者提供高效、直觀、便捷的管理體驗。
3.2.1 形象進度展示
形象進度展示是進度管理中的基礎性功能,可通過實景拍攝觀察工程施工進度,同時可實現(xiàn)道路帶狀3D 模型總覽及局部縮放(圖4)。 在瀏覽過程中也可通過點擊拉取等操作獲取任意位置的實際坐標、范圍體積、區(qū)域面積、點位距離等。
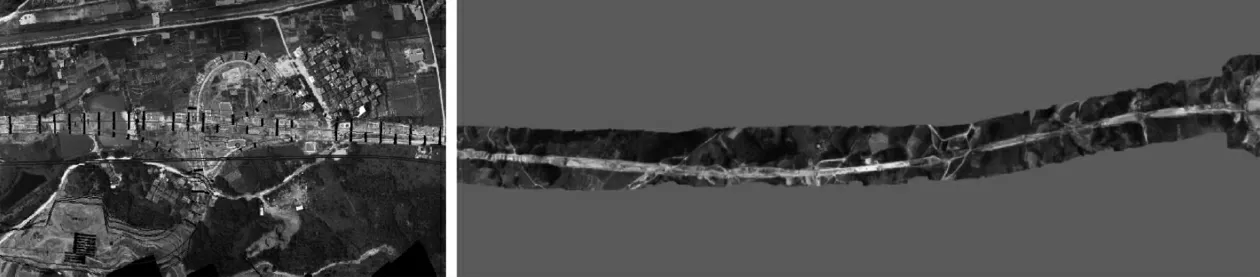
圖4 進度管理情況
3.2.2 征地拆遷進度掌握
在公路工程建設前期須重點關注征地拆遷進度問題,這直接決定了后續(xù)工程建設進度。 傳統(tǒng)基于地形圖的征地拆遷政策宣傳直觀性不強,無法準確向老百姓傳輸工程拆遷要點信息。 應用無人機管理技術,可將數據信息化正射影像結合征地紅線信息導入信息化平臺,生成3D 展示圖像,直觀顯示涉及拆遷的農田、林地及房屋分布情況(圖5)。 同時,對管理人員也可邊界掌握征地拆遷進度信息。

圖5 征地拆遷信息
3.2.3 720 度實景圖生成
控制形工程的要點控制是公路建設管理的重要內容,往往需要管理人員到現(xiàn)場進行勘查,對工程建設推進有一定的掣肘。 利用無人機管理技術生成的720 度實景圖可有效解決這一問題。 要實現(xiàn)這一功能,首先須進行數據采集,控制無人機懸停后利用云臺拍攝9 張圖片, 其中水平視角45°和0°各均勻角度4 張,90°視角地面拍攝1 張。 在數據處理過程中要結合720yun、Photoshop 以及PTGui 等軟件平臺, 將零散照片合并創(chuàng)建為720 度全景實景圖,上傳至手機及PC 端軟件,可實現(xiàn)視角跟隨、屏幕拖動視角、場景切換等功能進行查看,見圖6。

圖6 手機端720 度實景圖
3.2.4 5G 巡航功能實現(xiàn)
實時監(jiān)控管理已在諸多公路建設項目中得以應用,而此類監(jiān)控往往角度固定,因此難以避免地存在監(jiān)控盲區(qū),此外還有著管線斷路的風險。 而5G技術的出現(xiàn)提供了低延時、 大寬帶的技術支持,將其和無人機巡航技術相結合可實現(xiàn)5G 巡航監(jiān)控功能,獲取實時4K 高清影像,確保快速精準決策,其實現(xiàn)的技術路線見圖7。
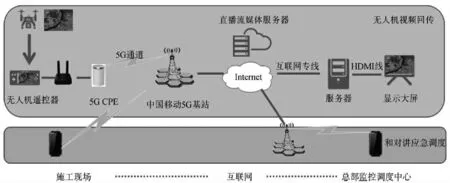
圖7 5G 巡航技術路線圖
3.3 工程量計量管理
利用無人機管理技術可實現(xiàn)填挖方、清淤換填等工程環(huán)節(jié)的工程量計量管理,對區(qū)域實施前后的高程數據信息和邊界信息進行處理,利用軟件實現(xiàn)高精度工程量計量,見圖8、9。將該信息和施工方上報計量數據進行對比,可快速、精準地對各方意見未達成共識部分內容進行對比,從而嚴格控制建設成本支出。
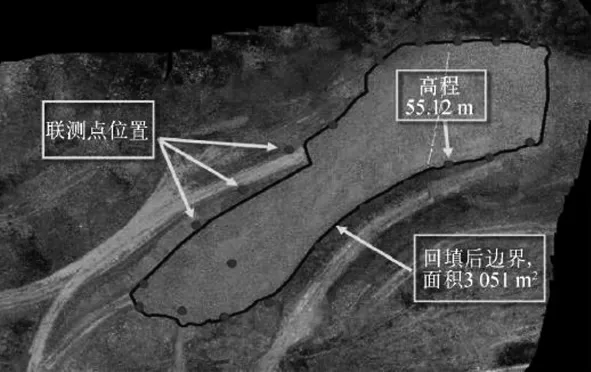
圖8 換填管理示意圖
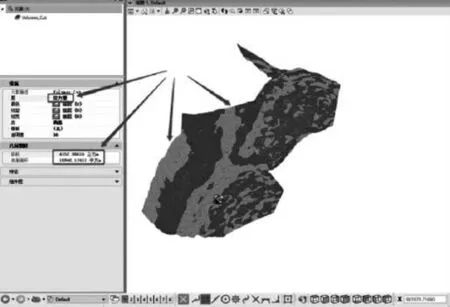
圖9 土石方軟件測算示意圖
4 結語
無人機機動性、靈活性強,利用其超低空遙感偵測手段可高效收集公路建設現(xiàn)場地形地貌數據;相關數據經信息化處理后可轉換為多種形式,通過計算機程序軟件實現(xiàn)工程建設信數據息化管理;結合工程現(xiàn)場其它勘測數據,能夠準確把控公路建設質量、進度及工程量計量等環(huán)節(jié),為管理者提供高效、直觀、便捷的管理體驗,也為公路建設管理體系開拓出創(chuàng)新性思路,最終實現(xiàn)產業(yè)升級。
猜你喜歡
中等數學(2022年2期)2022-06-05 07:10:50
商品與質量(2021年43期)2022-01-18 05:31:32
石油瀝青(2021年4期)2021-10-14 08:50:40
中小學信息技術教育(2021年8期)2021-09-10 17:59:45
甘肅教育(2020年18期)2020-10-28 09:06:02
小學生學習指導(低年級)(2020年6期)2020-07-25 02:31:36
人民交通(2019年16期)2019-12-20 07:04:10
小學生學習指導(低年級)(2018年9期)2018-09-26 05:59:44
瘋狂英語·新讀寫(2018年2期)2018-09-07 09:32:10
中國公路(2017年12期)2017-02-06 03:07:33