殘疾人輪椅智能避障功能創(chuàng)新研究
2022-04-11 11:02:17王榕趙延浩郝智誠陳日莉
電腦知識與技術(shù)
2022年5期
王榕 趙延浩 郝智誠 陳日莉

摘要:為研究電動輪椅的智能避障功能,該研究特點在于將HC-SR04超聲波傳感器和ZY101紅外避障傳感器相結(jié)合使輪椅對環(huán)境的感知更加準確,通過多傳感器融合技術(shù)和模糊控制技術(shù)的研究進一步提高避障功能計算的精確度,使電動輪椅在實際行駛中可以自主地完成路線規(guī)劃并躲避障礙物,更安全便捷地抵達目的地。
關鍵詞:智能避障;多傳感器融合;模糊控制
中圖分類號:TP18 ? ? ?文獻標識碼:A
文章編號:1009-3044(2022)05-0014-03
1 研究背景及意義
調(diào)查顯示,我國現(xiàn)有殘疾人、失能和半失能老人超過1.5億人,從輔助器具的使用量來看,現(xiàn)有為殘疾人有效提供急需的救助設施和服務仍然不足。由此看來,智能避障輪椅擁有廣闊的市場發(fā)展前景,其發(fā)展必不可少。智能輪椅國內(nèi)外研究現(xiàn)狀及發(fā)展趨勢見[1-2]。
基于電動輪椅和智能避障系統(tǒng)的研究,使輪椅能夠在實際操作過程中躲避道路上的障礙物且不斷感知周圍狀況,進而自主規(guī)劃和調(diào)整最優(yōu)路線,能夠安全快捷地到達目的地。此研究利用現(xiàn)代科技幫助弱勢群體更好地融入社會、建立良好的人際關系,且最重要的意義是降低輪椅事故的發(fā)生率和為殘疾人建立安全舒適的生活通道。
2 研究內(nèi)容
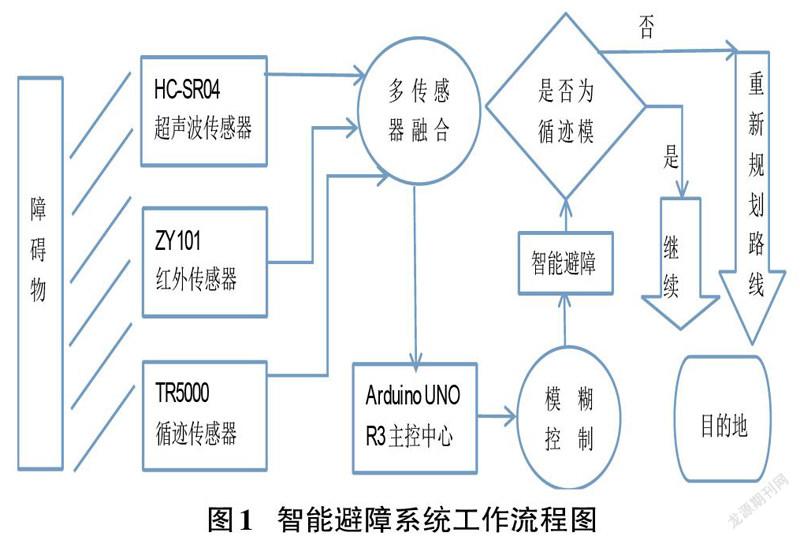
本研究采用“Arduino Uno R3”作為整個系統(tǒng)的核心,同時將常見的“HC-SR04”超聲波傳感器和“ZY101”紅外避障傳感器共同作用于障礙物感知和測距,通過模糊控制算法融合這兩種傳感器的工作結(jié)果,從而在輪椅遇到障礙物時,遵循模糊規(guī)則進行自動避障,控制輪椅的轉(zhuǎn)向,使輪椅不與障礙物發(fā)生碰撞。……
登錄APP查看全文
