農用獨輪自平衡車的設計與實驗
2022-04-12 08:37:26徐青正時慧杰李天華侯加林金天國
農機使用與維修 2022年4期
王 震,楊 帥,徐青正,時慧杰,李天華,3,侯加林,3,周 凱,3,金天國
(1.山東農業大學 后勤管理處,山東 泰安 271018;2.山東農業大學 機械與電子工程學院,山東 泰安 271018;3.山東省園藝機械與裝備重點實驗室,山東 泰安 271018;4.哈爾濱工業大學 機電工程學院,哈爾濱 150001)
0 引言
隨著現代化農業的不斷發展,農業機器人在農業信息化和智能化中的地位日益凸顯,改善了農民的耕作條件,提升了農產品耕收效率,推動了農業的不斷進步[1]。然而當前的農業機器人移動平臺價格及使用成本高,適用范圍小,不能完全滿足某些特殊環境下的作業要求。例如,大田果蔬采摘機器人,由于采摘作業季節性強、勞動強度大、費用高及采摘作業的復雜性,導致采摘自動化程度仍處于較低水平;無人植保機器人作為地面輪式機械難以避免對作物的碾壓,尤其是在轉向操作中存在大面積掃覆區域,不適合作物精細化管理,且難以適應地形較為復雜崎嶇的作業環境。針對上述情況,獨輪平衡車通過特殊獨輪結構減少了行進過程中對作物的掃覆碾壓[2],同時該獨輪車可原地360°轉向,具有極高的靈活性,并且采用電力驅動系統,實現低能耗維持機器平衡和行進,提高了鋰電池的使用時間和循環壽命,為植保移動平臺提供一種新選擇[3]。而對于采用電力驅動的機器人來說,在有限的時間內保證姿勢穩定更有利于獨輪車執行停車和對接操作[4-7]。
獨輪自平衡車采用非線性、強耦合、多變量的復雜動力學系統,具有不同于傳統的設計概念。獨輪平衡車只能通過運動來保持機身相對穩定,即依靠輪子轉動和風扇的反作用力保持平衡[8-11]。區別于在靜止狀態下保持穩定的多輪機器人,該結構簡單輕巧,能在崎嶇地帶穩定移動,能量消耗少,其高聳的機械骨架可搭載多種作業工具或傳感器,適用范圍得到顯著提升[12]。同時,獨輪平衡機器人還具有以下實用優勢:可以繞地面接觸點原地旋轉,轉向角度可為任意值。車體結構簡單輕巧,可靠性高,制造成本低,維護保養容易。機體的特殊結構可允許搭載多種、多個作業工具和傳感器[13-14]。
農業機器人的發展離不開農業智能化裝備技術的進步,農業領域智能機器人技術是農業智能裝備化技術最重要組成部分,受到國內外學者的密切關注[15]。美國發明家狄恩卡門發明設計了Segway PT,它的特點是兩個車輪共軸,可差動運動,利用倒立擺原理達到動態平衡[16]。日本筑波大學開發了一款單輪機器人,該機器人由車身和直流電機驅動的磁盤來穩定其姿勢,不需專用動力來改變機器人的偏航方向,其使用正弦輸入磁盤和車輪改變偏航方向[17]。上海交通大學的團隊以動力學為出發點,獨輪車和駕車人組成的系統為對象,建立了相匹配的動力學方程和力學模型[18],并提出了獨輪車穩定性的必要條件。以上獨輪機器人的模型各不相同,但目前皆存在結構復雜、成本高、功耗高、適用范圍小等問題。
基于上述情況,總結前人研究理論與成果,采用現代先進的技術設計了以ESP32作為控制核心的獨輪自平衡車。該獨輪自平衡車具有結構簡單、成本低、適用性強、壽命長、功耗低和可靠性高等優點。
1 系統結構與工作原理
1.1 機械系統結構
機械系統主要由機械骨架、風扇、保護罩、橡膠輪、電池、直流電機、伺服電機等組成,計算機建模結構如圖1所示。獨輪自平衡車實物結構如圖2所示。

圖1 獨輪自平衡車模型圖
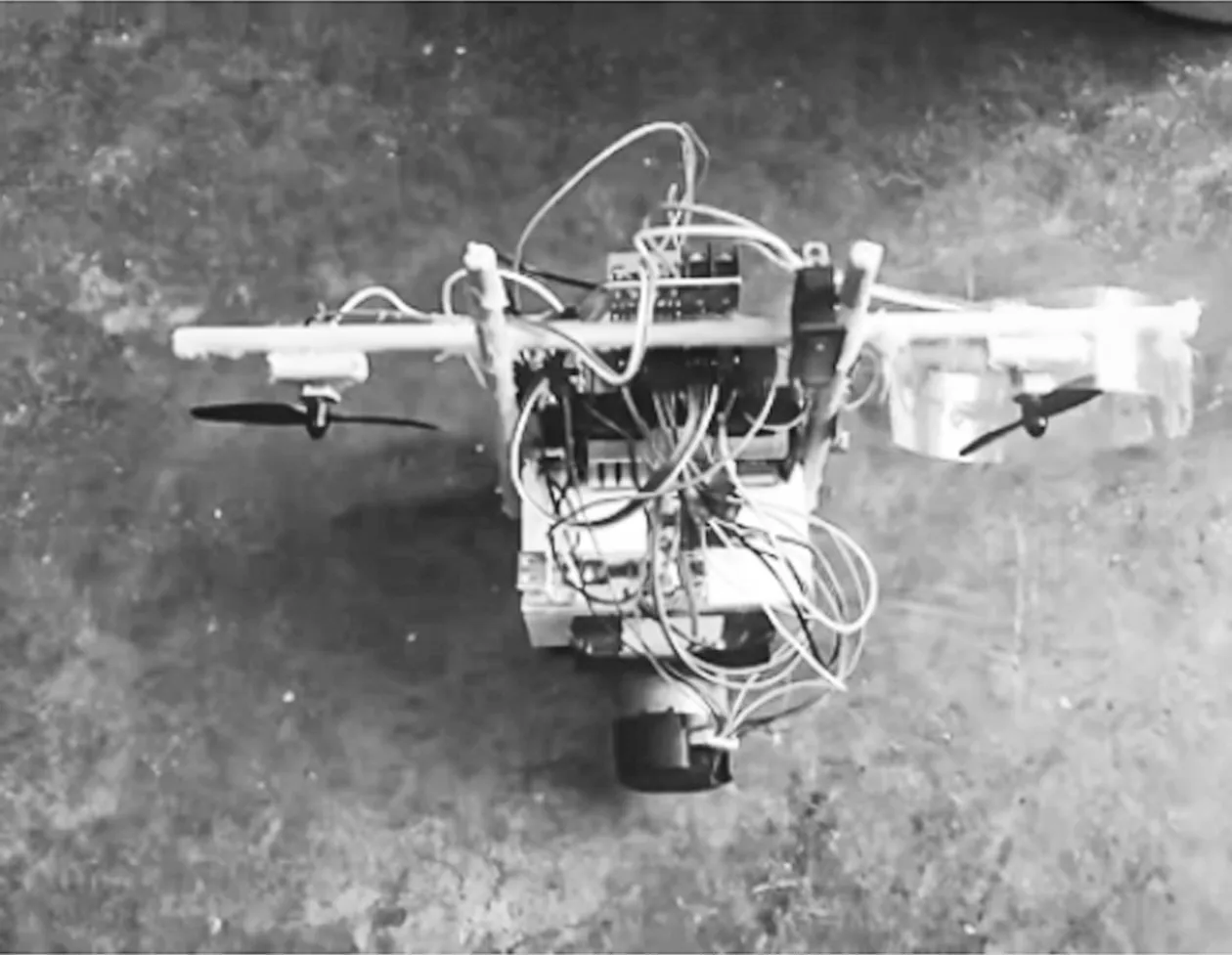
圖2 獨輪自平衡車實物結構圖
1.2 控制系統結構
獨輪自平衡車控制系統原理如圖3所示,信息采集依靠MPU6050傳感器和編碼器完成。MPU6050通過內置的陀螺儀姿態傳感器和加速度傳感器分別測量運動角速度與加速度。運動加速度是包含重力加速度的合加速度,其內部的數字運動處理器可以由重力加速度在各運動軸上的分量計算角度,但加速度傳感器容易受外部運動影響,而角速度傳感器無法直接獲得角度,必須進行積分,因此易產生積分漂移。數字運動處理器可將角速度傳感器積分獲得的角度與加速度傳感器分量計算出的角度相互融合,最終輸出相對比較穩定和準確的姿態數據。

圖3 獨輪自平衡車控制系統原理圖
控制器可通過IIC總線與MPU6050的數字運動處理器進行連接和通訊,進而完成MPU6050的初始化配置和數據采集處理;另外,伺服無刷電機內置100線的雙相光電編碼裝置,通過簡單配置可輸出階躍數字信號,ESP32微控制器通過讀取的姿態數據和編碼器數據進行多個PID計算,計算結果通過電機驅動程序疊加輸出。
1.3 工作原理
獨輪自平衡機器人采用不平衡系統,為簡化分析過程,將其解耦成俯仰和橫滾兩個方向上的平衡,每個方向上的平衡都可以看作一階的倒立擺模型。倒立擺控制系統(Inverted Pendulum System)具有復雜性、不穩定性、非線性的特點,并且可以用作實驗平臺進行各種控制實驗。倒立擺的典型性在于以強耦合、不穩定、非線性為特點的控制系統作為被控對象,從而在控制過程中有效反應各種問題[19-22]。倒立擺按形式可分為旋轉式、環形、懸掛式;按級數可分為一級、二級、三級、四級、多級等;按其運動軌道可分為水平式、傾斜式。
倒立擺系統主要由控制器、運動平臺和受控桿三部分組成。可由單片機作為倒立擺系統的控制器,以一根質量均勻的鐵桿作為受控桿,將運動平臺與受控桿相連接。具體結構如圖4所示。直線型一階倒立擺受控過程如下。
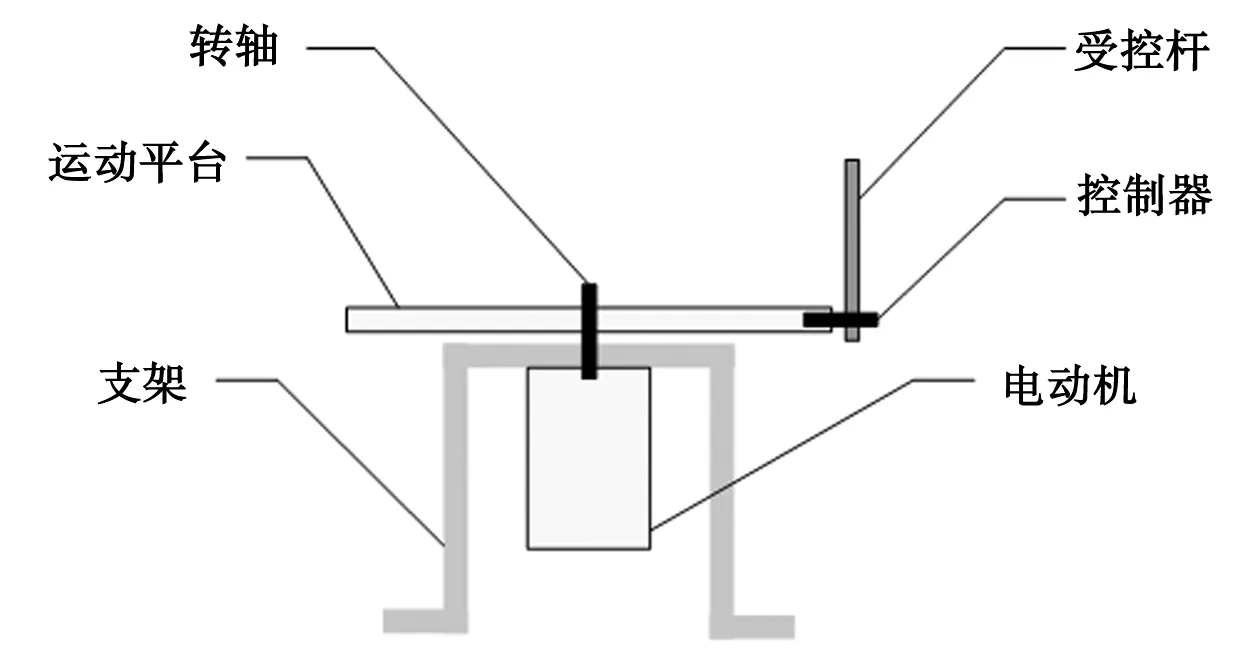
圖4 直線型一階倒立擺結構
狀態一:受控桿下垂,運動平臺無速度,控制器未工作,即系統處于自然平衡穩定狀態。
狀態二:控制器處于工作狀態,運動平臺被驅動獲得速度,同時受控桿在慣性力的作用下開始擺動,即系統處于起擺狀態。
狀態三:當受控桿受到干擾,上升至模型預計的小角度范圍內時,控制算法啟動,即為穩定控制狀態。
狀態四: 倒立擺進入受控穩定狀態,即由自然穩定變為受控穩定。
1.4 PID控制算法
上述為倒立擺系統由自然穩定狀態轉至受控穩定狀態的控制過程,控制算法的不同對控制過程會產生不同的影響,但目標都是維持系統的平衡穩定,故本系統采用 PID 算法對其進行穩態控制。
獨輪自平衡車平衡控制的主要問題是控制算法的開發。獨輪自平衡車控制系統采用了增量式 PID 控制算法作為獨輪自平衡車控制系統的核心算法,通過系統輸入值和輸出值,即設定值和測量值之間的偏差,進行比例、積分和微分的復合計算,進而得到控制量的大小。小車系統采用雙閉環 PID 控制算法(圖5)實現自平衡控制。根據編碼器產生的脈沖進行數據轉換,進而得到實時速度信息,此信息作為反饋量實現了速度的閉環控制[23-25]。另外,融合后的小車傾角的最優值作為反饋量,實現了姿態的閉環控制。姿態閉環控制采用了 PID 控制器,電機PWM信號的占空比通過卡爾曼濾波輸出的小車傾角和角速度的優化值來計算,表達式為

圖5 系統雙閉環 PID 控制算法框圖
PWM=Kp×θ+Kd×θ
(1)
式中θ—修正系數。
為對增量編碼器檢測的小車速度進行比例控制,速度閉環控制使用 PID 控制的輸出作為PWM信號占空比的增量值ΔPWM,表達式為
ΔPWM=Ki×speed
(2)
將姿態閉環控制和速度閉環控制融合后,再由主控制器輸出給直流電機,以避免兩者之間的相互影響,進而獲得二者融合后驅動模塊的PWM信號PWM總,表達式為
PWM總=Kp×θ+Kd×θ+Ki×speed
(3)
獨輪自平衡車以ESP32單片機為核心,利用其內置IIC接口及I/O口采集信號傳感器數據,當檢測到機器人信號與期望信號存在誤差時,通過PID算法計算輸出量,利用I/O口輸出PWM信號,從而控制由驅動電動機、伺服電機、槳片及驅動輪所構成的驅動系統執行機構,使伺服電機控制車輪轉動,最終作用至機械本體以保持平衡或抵消信號誤差。
2 機械結構設計
2.1 本體設計
獨輪自平衡車機械結構要滿足簡單、輕量化的要求,以降低制造成本、減少工作能耗。獨輪自平衡車機械結構能夠應對設計工況下可能遇到的復雜力的作用,保持一定的剛度。
此外,獨輪自平衡車屬于平衡機器人,所以機械結構除了滿足以上要求,還應盡量保持力平衡。因此將電池、電機、控制板相對均勻分布,以減輕力不平衡所帶來的不穩定問題與額外能量消耗問題。
2.2 MCU微控制器的選型
ESP32單片機內整合了射頻模組、開關器件、低噪聲放大器、功率器件、電源控制系統和過濾器,整個芯片占用的PCB物理空間最小。可選擇AP、STA、AP/STA 共存多種模式,可使用Lua開發環境編程,支持Arduino開發環境,使用方便靈活。ESP32單片機中WIFI藍牙芯片實現了無線局域網與藍牙的集成開發,物理空間占用極低。ESP32單片機作為系統級SOC,實現了良好的無線性能,功耗控制優秀,具有整合度高等優勢。
為實現低功耗、高運算速度的目標,獨輪雙軸自平衡機器人采用ESP32單片機,此單片機體積小巧,便于裝配,單片機內部還存在穩壓供電芯片、I/O引出按鍵,便于開發與利用。ESP32單片機的電路圖如圖6所示,其實物圖如圖7所示。
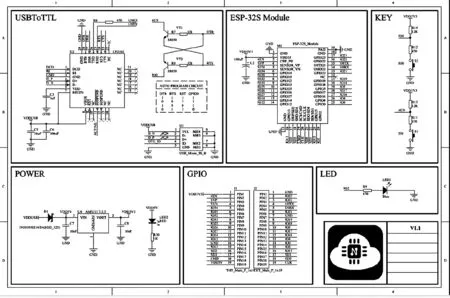
圖6 ESP32單片機電路圖
圖7 ESP32單片機實物圖
2.3 電機的選型
獨輪式自平衡車是欠驅動的、非線性的控制系統,在工作過程中相較于其他多輪機器人與地面接觸面積更小。所以在保持穩定性方面,三輪或四輪等多輪式機器人可以保持靜態穩定,而獨輪式自平衡車只能通過動態穩定,即其保持穩定狀態必須依靠運動來維持。
直流電機優點在于直流電機過載能力強,可抵抗一定電磁干擾;啟動迅速,調速范圍廣且調速平滑,并且在低速狀態下的轉動力矩相對更大;采用直流驅動可簡化供電電路;驅動系統結構較為簡單,經濟性高。但直流電動機內部結構相對復雜,導致其體積重量相對更大,其電刷與換向器之間的滑動摩擦接觸產生電火花,加劇了機械結構磨損,因此直流電動機易發生故障,可靠性相對較低,工作壽命較短,需頻繁進行保養維護工作。
伺服電機的優點在于控制精度高,具備編碼器,可實時反饋電機狀態。避免了高負載下丟轉的問題;轉速高,轉動性能好,可承受大扭矩;在低速運行時轉速較為平穩;振動噪音明顯降低,發熱量小,舒適性強。但其驅動復雜,需搭配控制系統使用。
在電機的選擇上,需要滿足響應速度、精確度、轉速、扭矩等方面的要求。另外,因獨輪雙軸平衡機器人采用鋰電池供電,所選電機存在功率上的限制。綜上所述,最終選擇3.7 V N50強磁高速馬達及12~24 V微型直流無刷伺服電機提供動力。
3 控制系統設計
3.1 數據的采集及處理
獨輪自平衡車以ESP32單片機作為主控單片機,檢測裝置采用MPU6050傳感器作為前端傳感器,將MEMS結構運動信號轉變為電壓信號,再經過DMP進行數據融合濾波處理,最后將處理后的數據通過IIC總線輸送至ESP32單片機。ESP單片機通過PID算法計算輸出量,再通過驅動電機,使直流電機帶動風扇,伺服電機帶動車輪,使機器人本體保持直立與相對穩定狀態。數據采集過程原理如圖8所示。
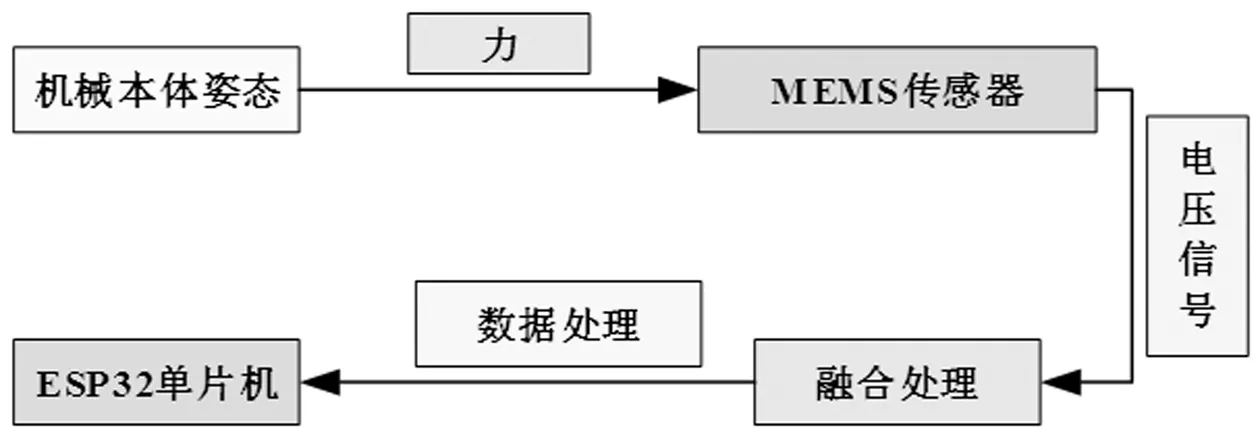
圖8 數據采集過程原理
ESP32單片機將采集的信息和行程信號進行測量處理后進行BLE實時傳輸和PID計算。同時,單片機還控制直流電機及伺服電機的運作,通過I/O接口控制驅動系統。微處理機硬件系統如圖9所示。
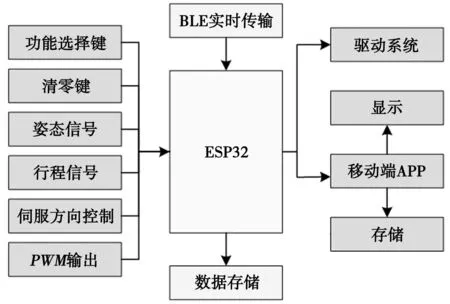
圖9 微處理機處理數據原理框圖
3.2 編碼信號產生系統
編碼信號是由編碼柵盤、發光二極管、光電管及附屬電路產生。當編碼柵盤阻擋發光二極管發出的光線照射光電管時,輸出引腳被下拉電阻拉低,否則輸出引腳被拉高。此編碼器具有兩個不同相位的檢測器,因此可輸出兩個不同相位的電平信號,單片機通過檢測兩個時域上的電平信號便能得出電機旋轉方向及運動角度,進而得出運動速度。編碼電路結構如圖10所示。

圖10 編碼電路結構
3.3 電機正反轉控制原理
直流電機驅動板通過雙相的PWM信號實現正反轉驅動,一路PWM為低電平,另一路PWM為正占空比信號,從而實現調速轉動,調換兩路信號時反轉。正反轉控制的電氣原理如圖11所示。

圖11 電機正反轉控制原理圖
4 控制程序設計
4.1 無線傳輸控制功能
獨輪自平衡車除保持自身穩定外,還可與操作者進行交互,將自身狀態參數展示給操作者,并接受操作者發出的命令。由于獨輪自平衡車為自主運動,操作者多與其相隔一定距離,在機器人本體上安裝顯示屏幕不便于讀取,操作者可以通過手機移動端APP連接并控制獨輪自平衡車執行各種指令。
ESP32芯片自帶藍牙、WIFI功能,開源軟件可大幅降低開發難度和開發時間,Blynk可提供開源IOT(物聯網)服務,可快速簡單地實現設備連接控制,使開發更簡單。BLE低功耗藍牙是藍牙4.0標準下的新型無線連接規范,其傳輸距離最大可達100 m,遠高于傳統藍牙的幾十米傳輸距離;數據發送時間低于3 ms,遠低于傳統藍牙的100 ms;響應延遲低至6 ms,遠小于經典藍牙的100 ms響應延時。因此,采用BLE低功耗藍牙技術進行傳輸控制可以增加遙控距離,降低能量消耗和響應延遲。
4.2 數據顯示
單片機對MPU6050數字運動處理器的信號進行實時處理,處理完成的數據由BLE低功耗藍牙傳輸至移動端APP進行顯示。MCU程序中需要設置終端顯示器的虛擬引腳和數據存儲臨時變量,移動端可以進行數據的顯示及命令傳輸。
4.3 功能按鍵設置
移動端BLE遙控程序需要控制獨輪自平衡車前后運動及轉向,因此需要設置兩個變量參數分別為“front and back”“left and right”,并在移動端APP中設置四向搖桿,并將搖桿參數通過中間變量vpin_value傳遞給“front and back”“left and right”。此外,要實現PID參數整定及重心整定,需設置兩個標志變量并連接到兩個按鍵的虛擬引腳,當虛擬引腳發生變化,與之相連接的標志變量PID、center則發生變化。在程序中,通過檢測標志變量,選擇性執行各分段程序。
為防止獨輪自平衡車開機時因參數設置問題產生過度運動而損壞其結構,需設置啟動保護功能,在第一次開機時不進行電機驅動,需進行按鍵操作,使標志位設置為允許,同時將信號調整期望設置點設置為當前狀態,程序檢測驅動標志位,若檢測到標志位已經設為允許,則進行PID計算及電機驅動,以避免產生過度運動。
4.4 重心整定
在ESP32程序中,要保證獨輪自平衡車能夠在重心改變的情況下依舊保持相對穩定,如果原有的姿態PID計算中設定目標值偏離機械重心過大,則會使獨輪自平衡車穩定性變差。因此,當重心發生變化時,程序開始進行檢測,當獨輪自平衡車姿態參數到達設定點,且整體加速度未超過設定范圍,檢測各姿態軸角速度;若其處于設定點時仍具有過大加速度,即存在運動趨勢,則通過更改姿態設定目標值以抵消此運動趨勢。
此功能通過center標志位選擇性運行,center標志位由blynk移動端APP按鍵賦值。
獨輪自平衡車穩態平衡時選擇PID算法控制,所以其對于相應的實時性要求較高,即在PID參數中比例系數Kp對于系統影響最大,為簡化程序,PID參數整定僅對比例系數進行調整。
當檢測到系統輸出不足導致的失穩時,小幅增加比例系數Kp;當檢測到系統因比例系數過大導致輸出過大出現震蕩情況時,程序小幅減小比例系數Kp。
5 實驗
在ESP32程序中,獨輪自平衡車為保持平衡、穩定,需進行多個PID計算,若程序中各PID參數不能滿足穩、準、快的要求,可通過PID參數整定,通過觀察獨輪自平衡車狀態,若不滿足要求則微調PID參數。在PID算法中,比例系數Kp越大系統響應越快,但Kp過大容易造成振蕩。微分系數Kd能夠增加系統阻尼,減弱振蕩,同時也使系統響應變慢。積分系數Ki可調節靜態誤差,提高系統精度,但容易受之前的數據影響,不能及時響應。
當MPU6050傳感器和編碼器傳感器固定一位置時,參數I保持不變,分別改變P、D參數,表1為P1、D1、P2、D2不變,P4、D4、P5、D5改變時的參數值,表2為P1、D1、P2、D2改變,P4、D4、P5、D5不變時的參數值,表3為P1、D1改變,P2、D2、P4、D4、P5、D5不變時的參數值,測量參數均為平衡車穩定時的參數。
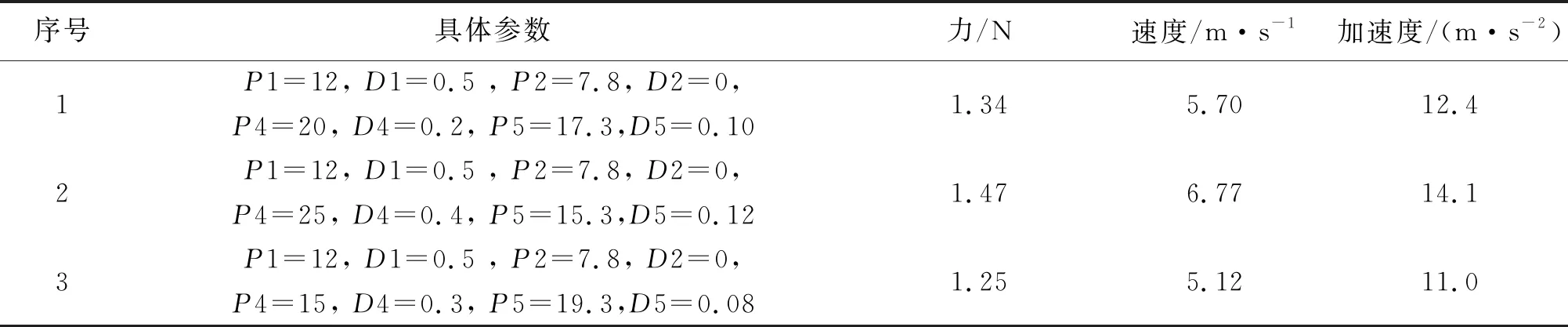
表1 P1、D1、P2、D2不變,P4、D4、P5、D5改變
通過表1可知,當P1、I1、P2、I2不變,P4、I4、P5、I5逐漸增大時,力、速度、加速度逐漸變大,但實驗測得P4、I4、P5、I5越小時,平衡車較穩定,可以抵抗抗輕度推動。
通過表2可知,當P4、I4、P5、I5不變,P1、I1、P2、I2逐減小時,力、速度、加速度略微減小,P1=10,D1=0.49 ,P2=0.25,D2=0時比較穩定,但是不能控速;P1=9.8,D1=0.47,P2=0.24,D2=0時有小抖動,不能推;P1=9.4,D1=0.45,P2=0.20,D2=0較穩定,但遙控前進略微延后。

表2 P4、D4、P5、D5不變,P1、D1、P2、D2改變
通過表3可知,當P2、D2、P4、D4、P5、D5不變,減小P1、D1時,力、速度、加速度不呈線性改變,當P1=9,D1=0.45 ,P2=0,D2=0,P4=0,D4=0,P5=0,D5=0時平衡車性能好,但不能抵抗強干擾;P1=8,D1=0.45,P2=0,D2=0,P4=0,D4=0,P5=0,D5=0時平衡車比較抖;P1=8,D1=0.40,P2=0,D2=0,P4=0,D4=0,P5=0,D5=0時平衡車有小抖動并且不能控速。
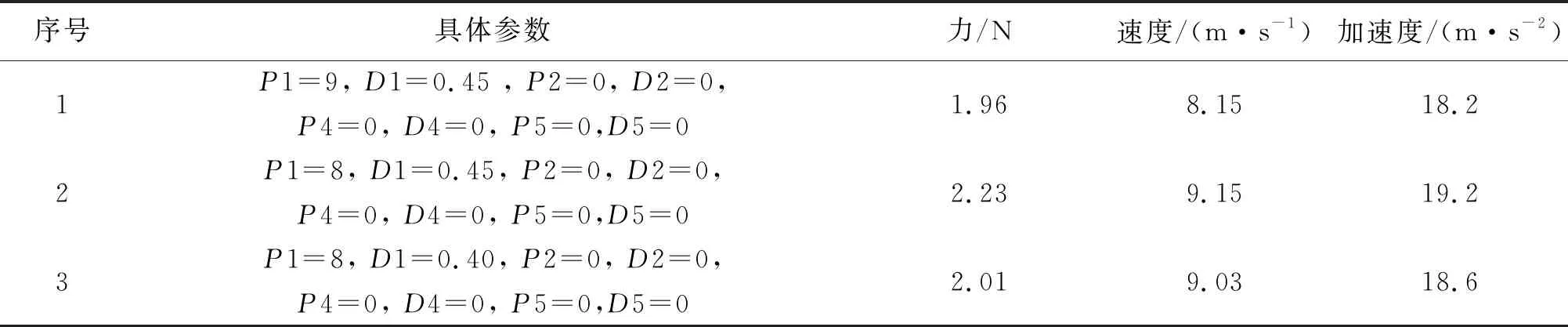
表3 P2、D2、P4、D4、P5、D5不變,P1、D1改變
根據實驗數據得出:當P1=9,D1=0.45,P2=0,D2=0,P4=0,D4=0,P5=0,D5=0時自平衡車性能好,可以抵抗輕微干擾,滿足運動可控和平衡穩定的要求。在PID參數中比例系數Kp對于系統影響最大,通過檢測系統輸出進而小幅增減比例系數Kp,使機器人始保持穩定狀態。
6 總結
本文設計的獨輪自平衡車,以ESP32單片機為主控單元,采用雙閉環PID控制算法,利用卡爾曼濾波輸出的小車傾角和角速度的優化值,對小車系統進行自平衡控制。同時,利用高響應速度的MPU6050傳感器,由內部集成的數字運動處理器(DMP)進行數據融合濾波處理,通過低功耗藍牙(BLE)進行數據傳輸、運動控制以及機械重心計算,并通過多次實驗選擇一組最優PID參數,測定表明當P1=9,D1=0.45,P2=0,D2=0,P4=0,D4=0,P5=0,D5=0時,該自平衡車抗干擾能力強,可保持平衡穩定的工作狀態。此外,獨輪自平衡車相對于多軸植保無人機器人具有負載量更大、運動更靈活、占地面積小、驅動功率小、電池壽命高等優勢,還具備了一定的抗干擾能力,極大提高了機器人在復雜崎嶇地區作業的實用性與可靠性,為平衡系統的進一步研究提供了參考價值。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45