具有發電功能的儲能小車
2022-04-12 04:03:22孫逸潔馬蕾
電子制作 2022年7期
孫逸潔,馬蕾
(鄭州鐵路職業技術學院,河南鄭州,450000)
0 引言
本文設計一輛具有發電功能的智能小車,小車以法拉電容為唯一儲能元件,一次完整的充電過程限定在5m之內。基本部分要求小車具有充電指示、一鍵啟動、沿直線行駛、實時顯示行駛距離等功能。發揮部分要求小車可沿直徑為60cm的圓循跡,且能探測車下方的硬幣數量,且要求行駛距離越遠越好。根據以上分析可知,小車需要液晶屏、信號采集電路、驅動電路等,題目要求充電電容作為唯一的儲能元件,且限定了發電距離。想要完成基本部分和發揮部分的各項功能,低功耗設計將是系統方案的重點部分。
1 原理與設計
為提高發電單元的儲能,可采用高齒輪比的直流電機,然而,齒輪數量的增多,勢必會引入較大的摩擦力,降低系統效率。因此,本方案選用高齒輪比的直流電動機作為發電機,獨立于小車的驅動電機。考慮到空心杯電動機具有轉換效率高、轉動慣量低、便于控制等特點,本方案選用空心杯直流電動機為小車的驅動電動機。
手動發電時,發電機轉速不均勻、電容電壓不恒定,為滿足控制器、驅動等單元對電壓穩定性的要求,本方案采用同步升、降壓變換器相結合的方式,分為給驅動電機、單片機最小系統供電。為進一步降低系統功耗,小車的控制器、信號采集電路、電壓變換電路等均選用低功耗拓撲和低功耗器件。
循跡部分可通過雙輪差速原理實現。為了提高循跡精度,通常情況下,采用多路紅外對管進行循跡,對管數量越多,循跡精度越高,同時,系統功耗也越大。因此,本系統選用一對紅外對管,獲取小車方向信號。結合滯回原理,可將循跡誤差控制在有限范圍內,并實現順時針、逆時針等循跡功能。系統整體框圖如圖1所示。

圖1 系統整體框圖
1.1 耗能分析
(1)驅動電機:低功耗、低慣量;
(2)開關管:低電壓、低導通電阻Ron;
(3)超級電容:低串聯阻抗(ESR)。
1.2 系統提高效率的方法
1.2.1 發電機選擇
有效發電區域限定在5m內,總的發電量等于人在此區域內克服電機摩擦力做的功。顯然,摩擦力(安培力)越大,做功越多,小車儲能越大。為提高發電量,本文選用47:1變比的直流發電機。為防止電流倒流,發電機和超級電容之間串聯低壓二極管。
1.2.2 行駛距離要求
直流電動機的數學模型等效于一階電路,當電機型號確定、參數已知時,通過實測,尋求轉速和效率的最佳匹配值,提高效率。
1.2.3 驅動電路選擇
本文選用由MOSFET構成的直流斬波電路,由彌勒效應可知,MOSFET損耗主要包含開通、關斷損耗兩部分,提高開關速度、優化開關頻率可有效降低開關損耗,通常情況下,亦選用低導通電阻的MOSFET。
1.2.4 最小系統低功耗
題目要求用液晶屏顯示行駛距離和檢測到的硬幣數量,為降低功耗,系統選用STM32L系列低功率MCU,待機電流為4mA。選用OLED作為顯示器件。
1.3 尋跡電路選擇
尋跡電路由光電傳感器控制的單穩態觸發器組成,穩態、暫穩態維持時間取決于小車的機械常數。
1.4 系統控制原理分析與設計
為提高系統的動態響應,本文采用滯回比較器控制雙輪差速模式,實現小車的轉向控制,其示意圖如圖2所示。
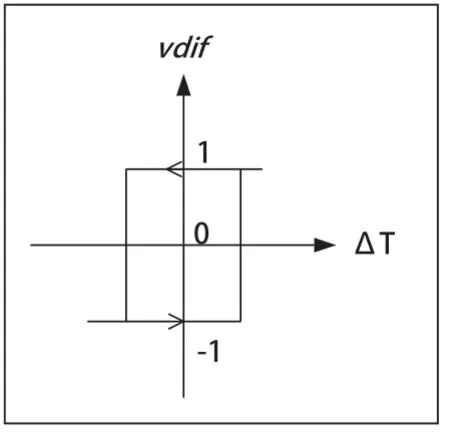
圖2 差速滯回比較器
圖中橫軸代表小車的等效轉矩矢量,由差速原理可知,轉矩矢量越大,小車的轉彎半徑越小,轉彎速度越大;反之,轉變半徑越小,轉彎速度越大。當轉矩方向反向時,可實現反向循跡。根據題目要求,本文將循跡誤差帶控制在2cm之內,循跡效果如圖3所示。當轉矩矢量使小車偏離循跡線時,施加相反方向的轉矩即可動態調整小車姿態。因此選用差速信號vdif作為滯回比較器的輸出信號,作用在直流驅動電機的控制電路上。
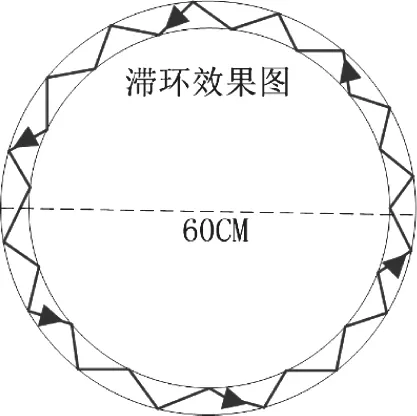
圖3 滯環循跡示意圖
理想情況下,系統的循跡誤差為零,即,小車中軸線始終在循跡線的正上方。借鑒鎖相環PLL控制原理,本文通過對比紅外循跡的反饋值和循跡方向邏輯值,得到差速邏輯值,此值表征雙輪的轉矩矢量,用來控制PWM斬波電路。為進一步提高小車的循跡速度,差速實現過程中,始終將外輪初始速度設定為恒定值,實時調整內輪的速度即可,如果要實現反向循跡,只需調換內、外輪的控制邏輯即可。系統控制原理如圖4差速循跡控制原理示意圖所示。
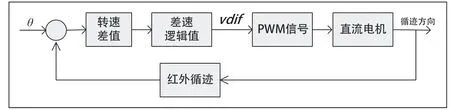
圖4 差速循跡控制原理示意圖
1.5 電路與程序設計
1.5.1 發電電路設計
發電機電路如圖5所示,D3、C5組成超級電容充電電路,其與R1、D1,以及R2、R3串聯組成充電指標電路和電壓采集電路。充電時,為防止電流倒灌,回路中串聯一支二極管,實現電流的單向流動。
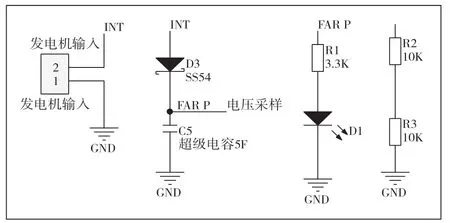
圖5 發電機電路設計
超級電容不同于傳統的電化學電容,超級電容在儲能時不發生化學反應,且儲能過程是可逆的,充電電容有重量輕、充放電次數多、儲能效率高等優點,已經廣泛應用于電動汽車、軌道交通等領域。
超級電容的儲能,一部分供給最小系統,另一部分供給小車驅動電路。最小系統要求電壓穩定在3.3V左右,當電壓降低至2.2V后,進入掉電休眠模式。為保證小車勻速循跡,本文選用同步BUCK、同步BOOST轉換器電路,對超級電容電壓進行轉換。在發電過程中,為了減小安倍力,要及時轉移超級電容上的儲能,本文選用兩級超級電容串聯結構,第一級超級電容C5對第二級超級電容C6充電,使其保持在5V。當電壓低于5V時,升壓電路BOOST使其保持5V,如圖6所示。
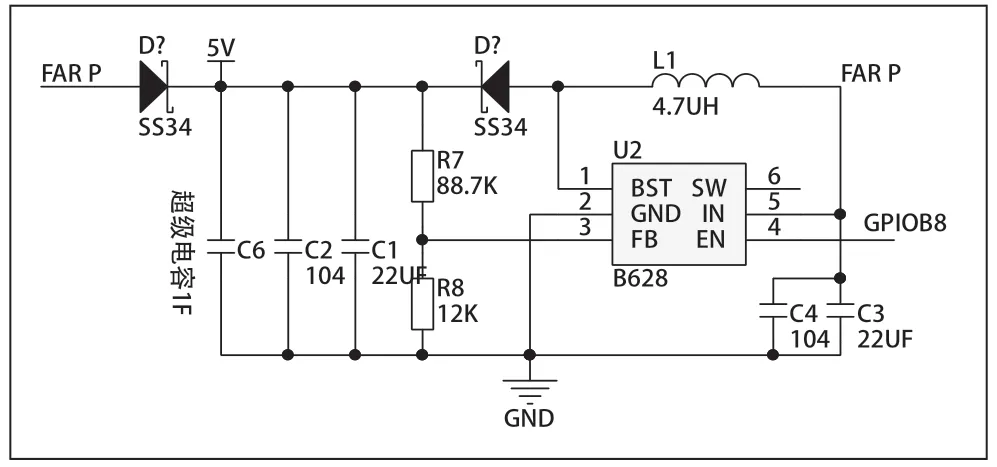
圖6 發電機升壓電路設計
同步升壓變換器可將低電壓轉換成高電壓,為提高轉換效率,通常選取同步整流結構對后級電流進行整流,現有專用的集成芯片如MT3608等可實現高效率電壓轉換。同步降壓變換器與之相反,可將高壓轉換成低壓,同理,為了提高轉換效率,后級多采用同步整流模式,本文選用M3410系列高效率同步降壓芯片,只需要簡單的外圍電路即可將5V電壓轉換至2V左右。
1.5.2 驅動電路設計
如前所述,當小車的兩個驅動輪速度差為零時,小車可沿直線行駛;當小車驅動輪子有速度差時,小車將沿著轉矩矢量和的方向偏轉。為了提高循跡速度,本文將外輪(逆時針循跡時,右側輪為外輪,順時針循跡時,左側輪為外輪)速度設定為恒定轉速,同時,以斬波形式控制內輪直流電動機的電樞電壓,即可動態調整小車轉向。斬波電路如圖7所示,當斬波頻率為f,占空比為D,母線電壓為U時,電樞等效電壓為:
由上式可知,電樞等效電壓Ueq為兩自由度變量,當母線電壓和占空比為定值時,電樞電桿即恒定不變。根據直流電動機電壓平衡方程和轉矩平衡方程可知,速度與電樞電壓呈正比,因此,通過控制電樞電壓,即可線性控制小車速度。需要注意的是,斬波電路設計過程中,需要合理選取母線電壓和開關周期,匹配小車的機械常數。值得注意的是,驅動電路也可以選用H橋。功率開關管選用低壓低導通電阻的MOSFET。為進一步加速功率管的開、關速度,需要設計合理的MOSFET驅動電路。本文選用N溝道MOSFET,電機安裝在MOSFET的漏極,如圖7所示。MOSFET驅動電路,如圖8所示,由單片機I/O口控制三極管的基極,三極管飽和導通時集電極-發射極導通,此時,P溝道MOSFET的柵極被拉低,進而使P-MOSFET導通,最終使PWM輸出電平與IO口輸出一致。例如當IO口輸出高電平邏輯1時,Qn導通,從而使P-MOSFET管Qm導通,PWM輸出高電平。
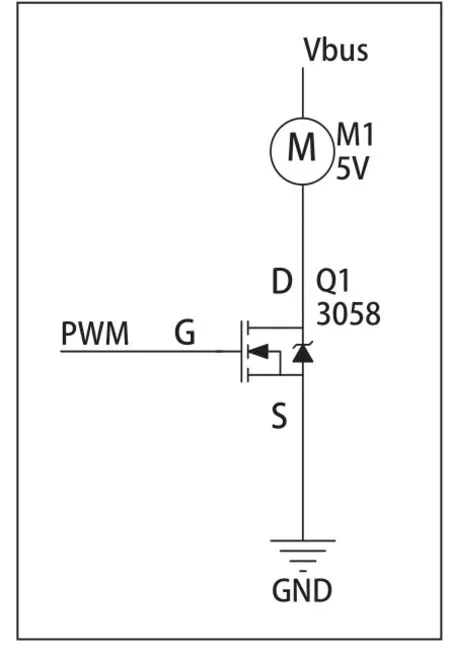
圖7 斬波電路
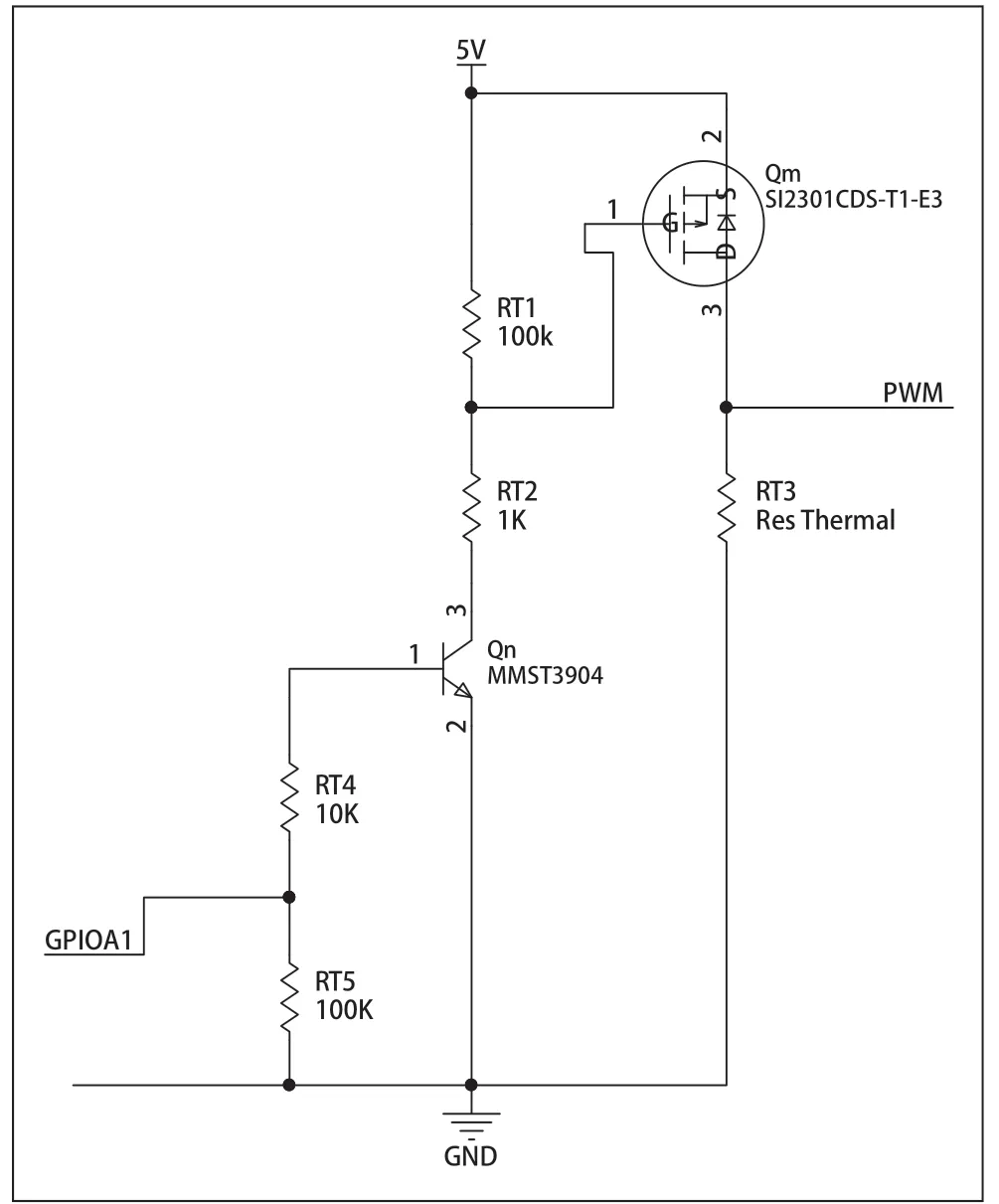
圖8 斬波驅動電路
本系統選用的直流電動機集成有測速碼盤,小車輪子轉到一周,碼盤上的柵格轉動10次,程序設計中,啟用單片機定時計數器計算柵格數量,然后根據輪子直徑即可換算出小車的行駛距離。
1.5.3 單片機最小系統
綜合考慮題目中一鍵啟動、硬幣檢測及數量顯示、行駛距離計量等功能,本文需要設計單片機最小系統,主要完成人機交互,A/D采集,PWM驅動等功能,為提高系統集成度,本文選配合適的低功耗傳感器,以總線形式與單片機最小系統進行數據交互。
1.5.4 尋跡與硬件探測電路
循跡模塊采用一體化紅外對管,它由發送器、接收器和檢測電路三部分構成。循跡區域為白色時,紅外線被反射到接收管,把光信號轉換成電信號,作為小車的方向信號。
硬幣探測電路選用基于電渦流效應的金屬探測傳感器,當傳感器探頭接近、或處于金屬正上面時,電感電流增大,反之,電感電流減小。為進一步降低系統功耗,提升行駛距離,當小車完成一圈循跡后,關門金屬探測器檢測功能,因此,液晶屏上只顯示的硬幣數量為循跡線下方的硬件數量,而不是最終檢測到的硬件數量。調試過程中,可根據硬件與探頭的距離,適當調整電感電流,以提高傳感器靈敏度。
2 實驗
2.1 測試條件與儀器
根據題目,測試條件如圖9所示。
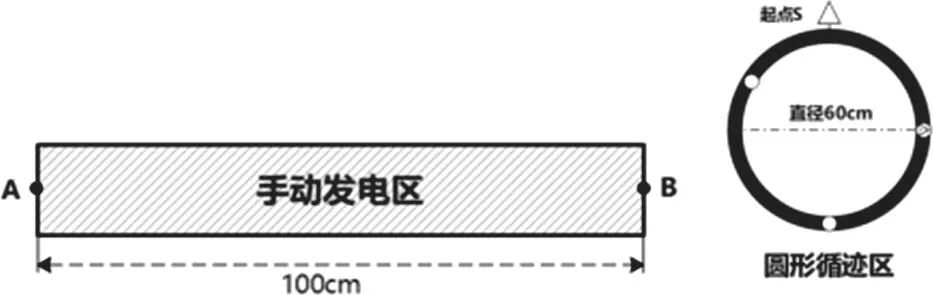
圖9 小車發電及循區示意圖
采用的測試工具及儀器有:秒表、卷尺。
2.2 測量內容及分析
電容壓到3V時,比較不同的轉速的實際距離,和理論計算距離,可計算能量損耗。
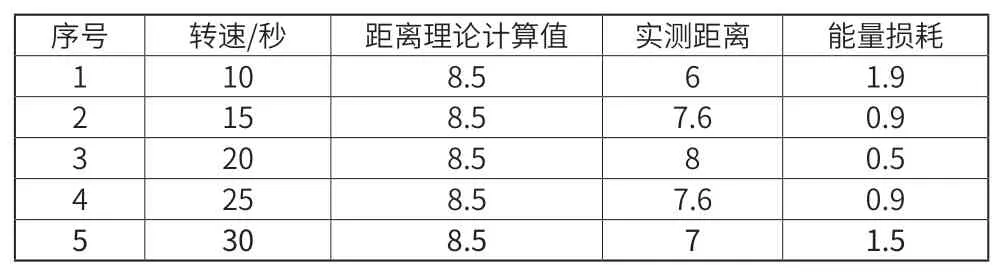
表1 測試數據
經過測試可知,電機的最佳轉速為20轉/秒,再由空心杯減速機構減速后帶動輪子。
3 結論
本文綜合考慮題目的功能要求,理論上采用單只紅外對管判斷小車的方位信號,進而借用滯回控制原理,將小車循跡誤差控制在一定范圍內。為進一步降低系統功耗,本文選用低壓、低導通阻抗MOSFET,并采用加速驅動電路,進一步降低MOSFET的開關損耗。電能變換方面,本文選用同步整流BOOST、BUCK拓撲,對超級電容的電能進行升、降壓變換,分別借給單片機最小系統、直流驅動電機。結合低功耗單片機的休眠模式,空心杯電機的超低轉動慣量、輕量化車身結構、以及直流驅動電機的轉速-效率優化等,小車綜合循跡圈數可超過60圈。測試表明,小車能夠較好的完成實驗的基本要求和發揮部分。
本文選用同步整流BOOST、BUCK拓撲,對超級電容的電能進行升、降壓變換,分別借給單片機最小系統、直流驅動電機。結合低功耗單片機的休眠模式、直流驅動電機。結合低功耗單片機的休眠模式,空心杯電機的超低轉動慣量、輕量化車身結構、以及直流驅動電機的轉速-效率優化等,小車綜合循跡圈數可超過60圈。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
裝備制造技術(2019年12期)2019-12-25 03:06:46
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
電子制作(2018年12期)2018-08-01 00:48:04
家庭影院技術(2017年9期)2017-09-26 03:41:45
