基于狀態(tài)重構器的頂驅控制方法
2022-04-13 03:20:58姜浩牛學斌張立軍尹文波張丙輝徐文凱
中南大學學報(自然科學版) 2022年3期
姜浩,牛學斌,張立軍,尹文波,張丙輝,徐文凱
(1.中國石油大學(華東) 機電工程學院,山東青島,266580;2.中石化勝利石油工程有限公司鉆井工藝研究院,山東東營,257000)
鉆柱的黏滑振動是井底鉆頭摩擦引起的一種“黏滯—滑脫—黏滯”的特殊轉動形式。隨著油氣開發(fā)由淺層轉向深層,鉆井深度增加,鉆柱的等效剛度降低,傳遞的扭矩不足以克服鉆頭和地層之間的摩擦力,從而產生黏滑振動,導致鉆具的振動加劇,容易發(fā)生鉆井事故,增加鉆井成本[1]。
HONG 等[2]提出了利用Kalman 狀態(tài)估算的方法計算井下鉆頭的位置與速度,利用數(shù)值方法分析控制性能,識別鉆頭的黏滑振動,估算鉆頭處的摩擦扭矩;黃根爐等[3-5]建立單自由度扭轉模型,分析了大位移井鉆柱黏滑振動機理,闡明了頂部轉矩負反饋減振方法;湯歷平等[6-7]建立了鉆柱系統(tǒng)的黏滑振動力學模型,研究了黏滑振動的自激振動特性,分析了不同初始條件下鉆頭的相軌跡及鉆頭處所受的摩擦扭矩;NAVARRO-LOPEZ等[8]提出了動態(tài)滑模控制策略來控制鉆柱系統(tǒng)的黏滑振動,結合相應參數(shù),對比分析了不同控制方法的穩(wěn)定性和魯棒性;付蒙等[9-11]基于二自由度集中質量模型,建立了狀態(tài)反饋和扭矩前饋振動控制方法。
我國對于鉆柱黏滑振動研究相對國外起步較晚,對于減小鉆頭黏滑振動的控制算法研究較少。基于上述學者的研究成果,本文作者建立鉆柱系統(tǒng)模型,分析黏滑振動特性,進行控制算法的仿真及實驗研究,驗證了井下參數(shù)重構算法的有效性,這對提高鉆井效率減少事故發(fā)生具有重要意義。
1 數(shù)學模型建立
鉆柱系統(tǒng)是整個鉆井設備中的重要組成部分,圖1所示為鉆柱系統(tǒng)結構圖,鉆柱系統(tǒng)結構主要由4個部分即頂驅、鉆桿、鉆鋌和鉆頭構成。
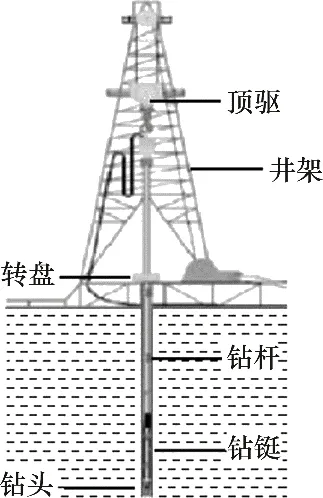
圖1 鉆柱系統(tǒng)結構圖Fig.1 Structure diagram of drill string system
將頂驅,鉆桿,鉆鋌和鉆頭視為等效的質量集中塊,考慮到在實際的鉆井工藝中,鉆鋌和鉆頭之間的剛性非常大,將鉆鋌和鉆頭視為一個等效集中質量剛體,將鉆桿視為僅有扭轉剛度而無慣性的彈簧,將鉆井液對系統(tǒng)運動的影響視為黏滯阻尼,建立三集中質量鉆柱系統(tǒng)運動模型[12],如圖2所示。
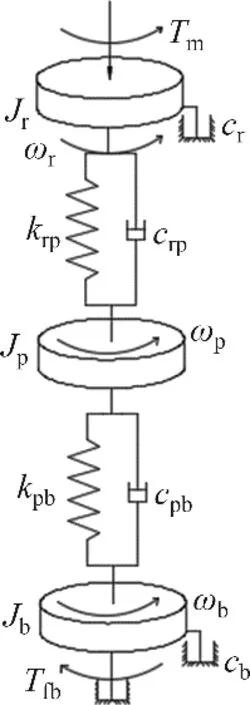
圖2 鉆柱系統(tǒng)運動模型Fig.2 Diagram of drill string system movement model
根據(jù)剛體運動學定律,分別對等效質量塊進行運動學分析,頂驅運動方程如下:

式中:Jr為頂驅的轉動慣量;cr為頂驅的阻尼系數(shù);φr為頂驅的旋轉角位移;crp為頂驅和鉆桿之間的等效阻尼系數(shù);krp為頂驅和鉆桿之間的等效扭轉剛度系數(shù);Tm為頂驅的驅動力矩;Trp為頂驅與鉆桿之間的合力矩;Tr為頂驅的阻力矩。
中間鉆桿等效質量剛體運動方程如下:
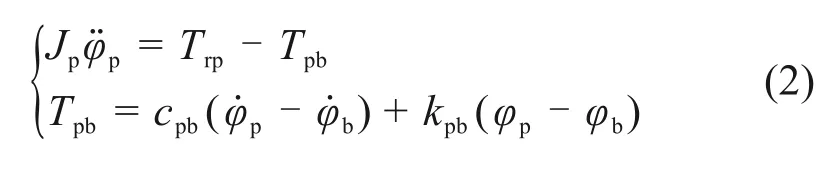
式中:Jp為鉆桿的轉動慣量;φp為鉆桿的旋轉角位移;φb為鉆頭處的旋轉角位移;Tpb為鉆桿與鉆頭之間的合力矩;cpb為鉆桿和鉆頭之間的等效阻尼系數(shù);kpb為鉆桿和鉆頭之間的等效扭轉剛度系數(shù)。
底部鉆頭等效質量剛體運動方程如下:

式中:Jb為鉆頭的轉動慣量;cb為鉆頭的流體阻尼系數(shù);Tab為鉆頭所受的合阻力矩;Tb為鉆頭的流體阻力矩;Tfb為鉆頭與地層之間的摩擦力矩。
綜合式(1)~(3)可得三集中質量鉆柱系統(tǒng)數(shù)學模型運動方程:
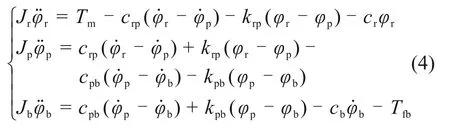
由黏滑振動引起Tfb屬于非線性摩擦,其可采用Karnopp非線性摩擦模型進行分析。定義一個極小的速度極限Dv,當速度位于[-Dv,Dv]區(qū)間內,可認為速度v為0,此時,摩擦力是靜摩擦力,它與系統(tǒng)所受其他合力相平衡,直到它超過最大靜摩擦力時,系統(tǒng)進入滑動階段,所受摩擦力與速度有關。Karnopp非線性摩擦模型表達式如下:
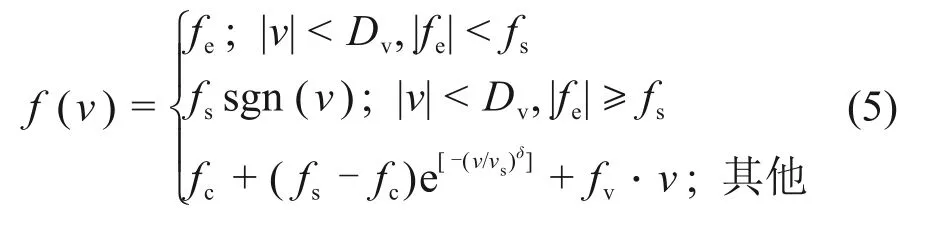
式中:v為系統(tǒng)運動速度;fs為最大靜摩擦力;fe為外力合力;fc為庫侖摩擦力;fv為摩擦黏性系數(shù);vs與δ均為Karnopp摩擦模型經驗常數(shù)[13]。
對式(4)所示鉆柱運動數(shù)學模型選取狀態(tài)變量:

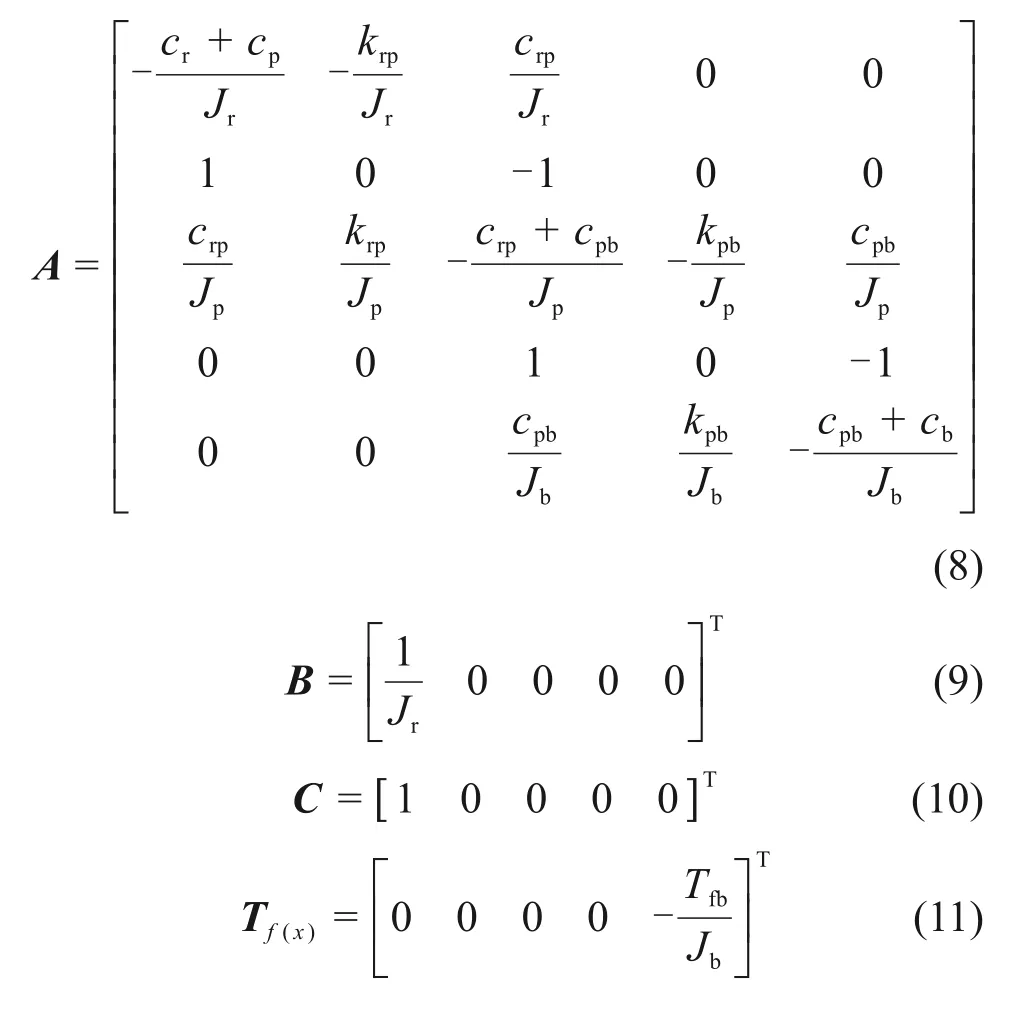
式中:Δφrp=φr-φp;Δφpb=φp-φb。將式(4)寫成狀態(tài)空間方程:

式中:A為系統(tǒng)的狀態(tài)矩陣;B為系統(tǒng)的輸入函數(shù)矩陣,u=Tm;C為系統(tǒng)的輸出函數(shù)矩陣。各控制矩陣分別為:
2 控制方案設計
在實際鉆井過程中,井下高壓高溫的工況條件及泥漿巖屑運移等導致難以直接獲得井下數(shù)據(jù),影響到井下工況的實時判斷和對鉆柱系統(tǒng)的實時控制,井下黏滑振動難以抑制。本文提出建立龍伯格狀態(tài)重構器,依據(jù)地上頂驅轉速ωr和扭矩Tm,估算鉆柱系統(tǒng)進行控制所需要的井下狀態(tài)變量[14],設計了基于狀態(tài)重構器的PID控制器。給定鉆柱系統(tǒng)期望轉速ωref,通過調節(jié)頂驅轉速ωr和扭矩Tm,實現(xiàn)井下鉆頭實際轉速ωb與期望轉速ωref保持一致,完成鉆柱系統(tǒng)黏滑振動的抑制,控制系統(tǒng)方案見圖3。
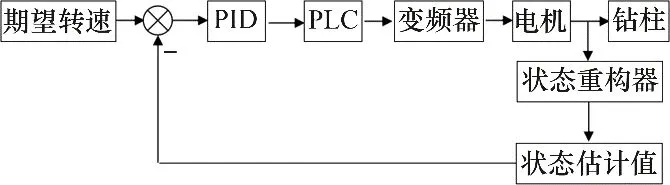
圖3 控制系統(tǒng)方案圖Fig.3 Scheme diagram of control system
2.1 狀態(tài)重構器設計
式(7)所示的鉆柱系統(tǒng)狀態(tài)空間方程中x為5維空間狀態(tài)變量,u為系統(tǒng)的輸入量,y為系統(tǒng)的輸出量,Tf(x)為摩擦干擾輸入量,而A,B和C均為確定維數(shù)的系統(tǒng)矩陣。在通常情況下,式(7)對應的龍伯格狀態(tài)重構器為

由于非線性摩擦干擾Tf(x)的存在,無法估算井下未知狀態(tài)參量,故需對狀態(tài)重構器進行修正,增加摩擦干擾估算項并通過估算值的誤差積分[15]予以調整,調整后的龍伯格狀態(tài)重構器[16]表示為

式中:為系統(tǒng)狀態(tài)的估算值;為摩擦干擾輸入估算值;Ga和Gb為相應的增益矩陣。根據(jù)系統(tǒng)的狀態(tài)方程,以頂驅轉速ωr和輸入扭矩Tm為重構器輸入量,以狀態(tài)變量x和摩擦力矩Tf(x)為估算變量,進行如下代換:
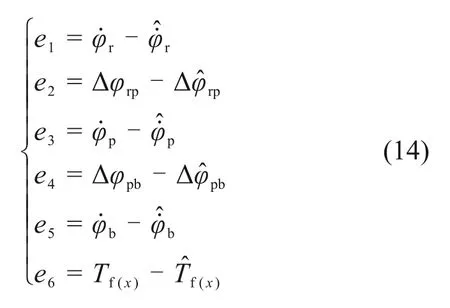
將式(14)代入式(13)狀態(tài)重構器,可得如下方程:
式中:G1,G2,G3,G4,G5和G6為增益比例系數(shù)。為了選定合適的增益比例系數(shù),采用最優(yōu)阻尼原理[17]確定參數(shù)。假設式(15)對應的狀態(tài)矩陣為M,根據(jù)|sE-M|=0 可求出狀態(tài)重構器的特征方程式(E為6 階單位矩陣)。最優(yōu)阻尼原理是將確定形式的控制器或者重構器和被控對象結合成整體系統(tǒng),根據(jù)系統(tǒng)的傳遞函數(shù)整理成為最優(yōu)阻尼特征多項式形式,從而得到與之相匹配的未知參數(shù)。式(15)對應的最優(yōu)阻尼特征多項式為

式中:D1,D2,D3,D4,D5和D6為系統(tǒng)阻尼比,根據(jù)最優(yōu)阻尼原理,所有系統(tǒng)阻尼比均取0.5;Te是系統(tǒng)的時間常數(shù),參考文獻[18],取0.3 s。通過將狀態(tài)重構器的特征方程式化為6階最優(yōu)阻尼特征多項式的形式,對比參數(shù)方程組可獲得比例增益系數(shù)G1,G2,G3,G4,G5和G6,經過計算可得比例增益系數(shù)分別為105.82,2.40×103,5.62×105,-7.31×104,1.25×107和-14.33,采用穩(wěn)定判據(jù)分析可知狀態(tài)重構器收斂、穩(wěn)定。
2.2 PID控制器設計
根據(jù)式(15)可獲得未知狀態(tài)變量的估值,利用狀態(tài)重構器與傳統(tǒng)PID控制理論相結合,既增強了傳統(tǒng)PID控制對非線性系統(tǒng)的抗干擾能力,又可根據(jù)狀態(tài)重構器的估算數(shù)據(jù)為PID 算式提供校正信息。根據(jù)圖3所示整體控制系統(tǒng)方案,采用MATLAB構建PID狀態(tài)反饋控制器。PID控制系統(tǒng)的一般方程式如下:

式中:kp,ti和td分別為比例系數(shù)、積分時間常數(shù)和微分時間常數(shù)。
PID控制系統(tǒng)通過調節(jié)井下轉速和給定轉速保持一致,從而消除鉆柱的黏滑振動現(xiàn)象,故取e=ωref-ωb,其中,ωref為鉆柱系統(tǒng)在輸入驅動扭矩下的所期望的正常轉速。由于井下轉速未知,故取e=ωref-ωb_re,其中,ωb_re為鉆頭估算轉速,從而得到關于輸入扭矩Tm的控制方程式為
式中:K1,K2和K3分別為比例系數(shù)、積分系數(shù)和微分系數(shù),經過調試,比例系數(shù)、積分系數(shù)和微分系數(shù)分別取14,32 和13。PID 控制器仿真模型見圖4。
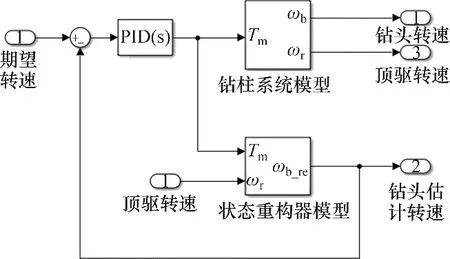
圖4 PID控制器系統(tǒng)仿真模型Fig.4 Simulation model of PID controller system
3 仿真分析
為了驗證控制方法對黏滑振動的抑制效果,搭建的三集中質量鉆柱系統(tǒng)仿真模型和狀態(tài)重構器仿真模型[19]見圖5。仿真模型參數(shù)參考文獻[20],見表1。

圖5 鉆柱系統(tǒng)和狀態(tài)重構器仿真模型Fig.5 Simulation models of drill string and state reconstructor
在頂驅恒扭矩驅動模式下,可以得到不同頂驅驅動扭矩工況下頂驅轉速ωr、鉆頭轉速ωb以及摩擦力矩Tfb的時域分析圖,根據(jù)表1給定的系統(tǒng)參數(shù),設系統(tǒng)初始狀態(tài)為0,獲得的MATLAB/Simulink仿真結果見圖6。

表1 鉆柱系統(tǒng)數(shù)學模型參數(shù)Table 1 Related parameters of mathematical model of drill string system
由圖6可知:當Tm為5 000 N·m 時,輸入扭矩較小,頂驅傳遞到底部鉆具的耦合力矩小于系統(tǒng)受到的靜摩擦力矩,此時,驅動力矩不足以驅動井底鉆具,ωb始終為0,ωr和Tfb經過短暫波動后保持不變,頂驅力矩與靜摩擦力矩相互抵消,系統(tǒng)未出現(xiàn)黏滑振動現(xiàn)象;當Tm為10 000 N·m 時,鉆柱系統(tǒng)出現(xiàn)明顯的黏滑振動,井下鉆具出現(xiàn)“黏滯—滑脫—黏滯”的周期性的交替運動,交替周期約為8 s,ωr波動范圍為3~8 rad/s,而ωb波動范圍在0~18 rad/s;底部受到的摩擦力矩Tfb也發(fā)生劇烈震蕩,Tfb的波動范圍為5 140~12 120 N·m,最大瞬時差值達6 976 N·m,Tfb的波動導致井下轉速也出現(xiàn)巨大波動,ωb在極短時間內達到ωr的數(shù)倍;當Tm提升到15 000 N·m,起始狀態(tài)頂驅轉速和鉆頭鉆速存在差異并呈現(xiàn)小幅波動,隨著時間增加,系統(tǒng)黏滑振動逐漸消失,46 s后,ωr和ωb趨向穩(wěn)定且兩者數(shù)值相同,此時,井底鉆具所受力矩為滑動摩擦力矩。
為模擬黏滑振動下狀態(tài)重構器對狀態(tài)變量的估算效果,根據(jù)圖6所示仿真結果,取Tm=10 000 N·m,對狀態(tài)重構器進行仿真驗證,仿真參數(shù)同表2,仿真結果見圖7。圖7中,ωr_re和ωb_re分別為ωr和ωb的估算值。由圖7可知:狀態(tài)重構器對井下狀態(tài)變量具有良好模擬性能,對ωr的估算誤差趨近0。對于ωb的估算,在“黏滯”狀態(tài)時存在較小估算誤差,但在“滑脫”狀態(tài)時其估算誤差也趨近0,由此可知狀態(tài)重構器可用于診斷黏滑振動的發(fā)生以及估算井下未知狀態(tài)變量。
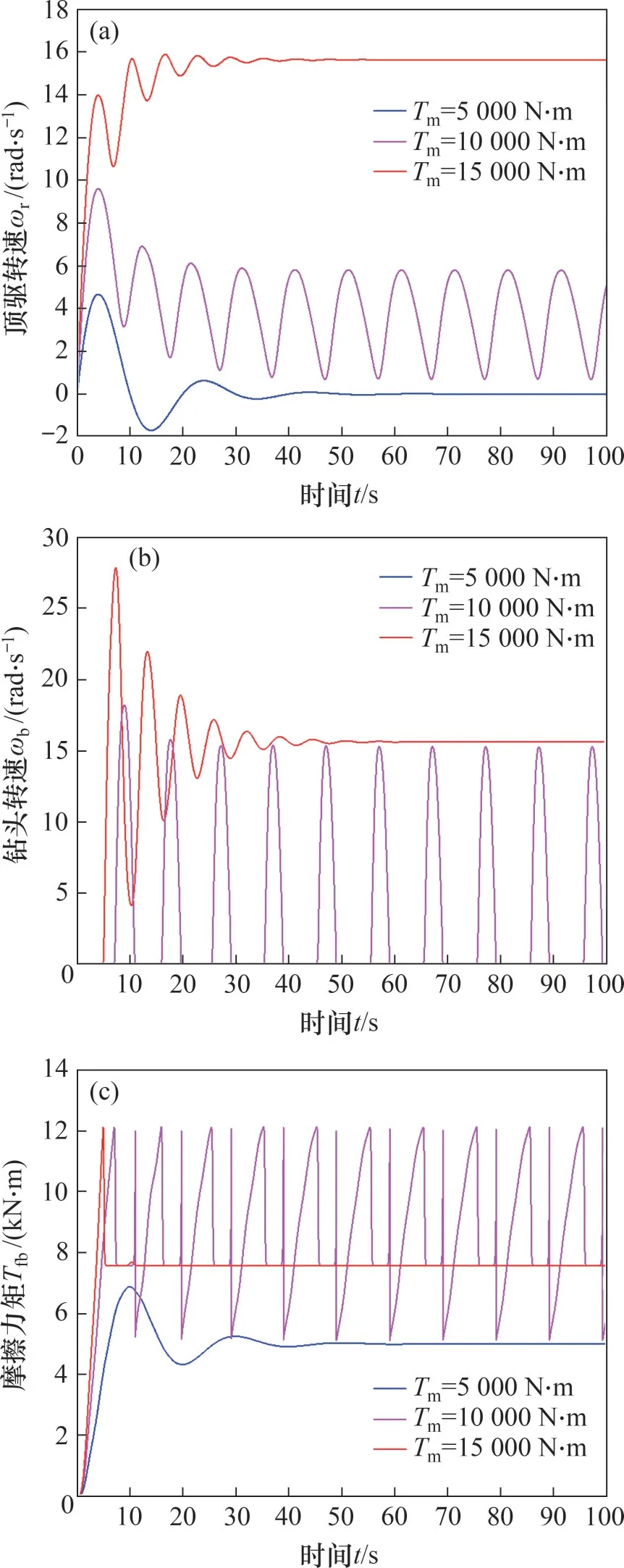
圖6 不同扭矩下的轉速和摩擦力矩時域分析圖Fig.6 Time domain analysis diagrams of rotational speed and friction torque under different torques

圖7 狀態(tài)重構器效果時域分析圖Fig.7 Time domain analysis diagrams of state reconstructor effect
為了不影響原有電控系統(tǒng),采用PID控制系統(tǒng)對鉆柱系統(tǒng)黏滑振動進行抑制,根據(jù)式(18),在MATLAB/Simulink 中設定ωref為8 rad/s。為了對比PID控制系統(tǒng)對黏滑振動的抑制效果,在50 s處開啟PID 控制,仿真結果見圖8。由圖8可知:未啟動PID控制系統(tǒng)之前,鉆柱系統(tǒng)持續(xù)性發(fā)生黏滑振動,50 s時開啟PID控制系統(tǒng),經過大約10 s抑制調整,井下鉆具和頂驅轉速ωr與ωb逐漸保持一致且與當前驅動扭矩下設定的穩(wěn)態(tài)轉速ωref一致。控制器在50 s 時進行控制切換,起始ωr與ωb會產生明顯黏滯階段,存在較大波動,在控制系統(tǒng)作用下,經過短時間超調后逐漸收斂至平穩(wěn)。所設計的PID控制方法對黏滑振動具有良好控制作用。
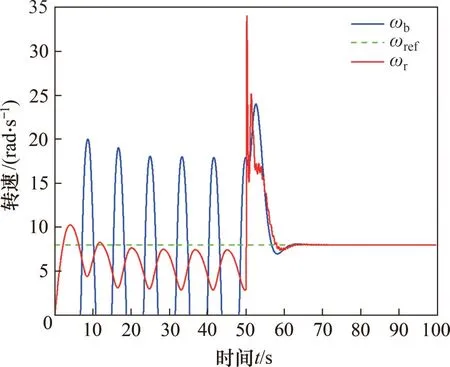
圖8 PID控制系統(tǒng)仿真時域分析圖Fig.8 Time domain analysis diagram of PID control system simulation
4 實驗驗證
4.1 模擬試驗臺設計
為了進一步分析黏滑振動,驗證控制方法對黏滑振動的控制效果,搭建了鉆具黏滑模擬試驗臺,鉆柱黏滑模擬實驗裝置原理圖見圖9。

圖9 實驗裝置原理圖Fig.9 Schematic diagram of experimental device
試驗臺采用金屬圓盤代表集中質量塊,采用淬火鋼桿連接件連接模擬鉆桿與圓盤,電控系統(tǒng)驅動電機帶動鉆桿模擬裝置轉動,模擬鉆進過程。試驗臺采用PCI數(shù)據(jù)采集卡采集驅動電機的實時轉速和扭矩,將采集的轉速和扭矩數(shù)據(jù)輸入工控機,經控制算法處理后,輸出控制信號控制電機轉速,實現(xiàn)鉆柱系統(tǒng)黏滑振動的抑制。
4.2 實驗結果及分析
試驗裝置通過PID控制驅動變頻器實現(xiàn)調速與扭矩輸出,通過人機接口軟件對試驗裝置的轉速、輸入扭矩、摩擦力矩等進行實時檢測。為檢驗控制算法的控制效果及狀態(tài)重構器的跟蹤效果,分別將頂驅轉速和鉆頭轉速真實測量值與估算值進行實時對比,在模擬黏滑振動過程中啟動控制器,獲得的頂驅、鉆頭轉速及重構器估算曲線見圖10。
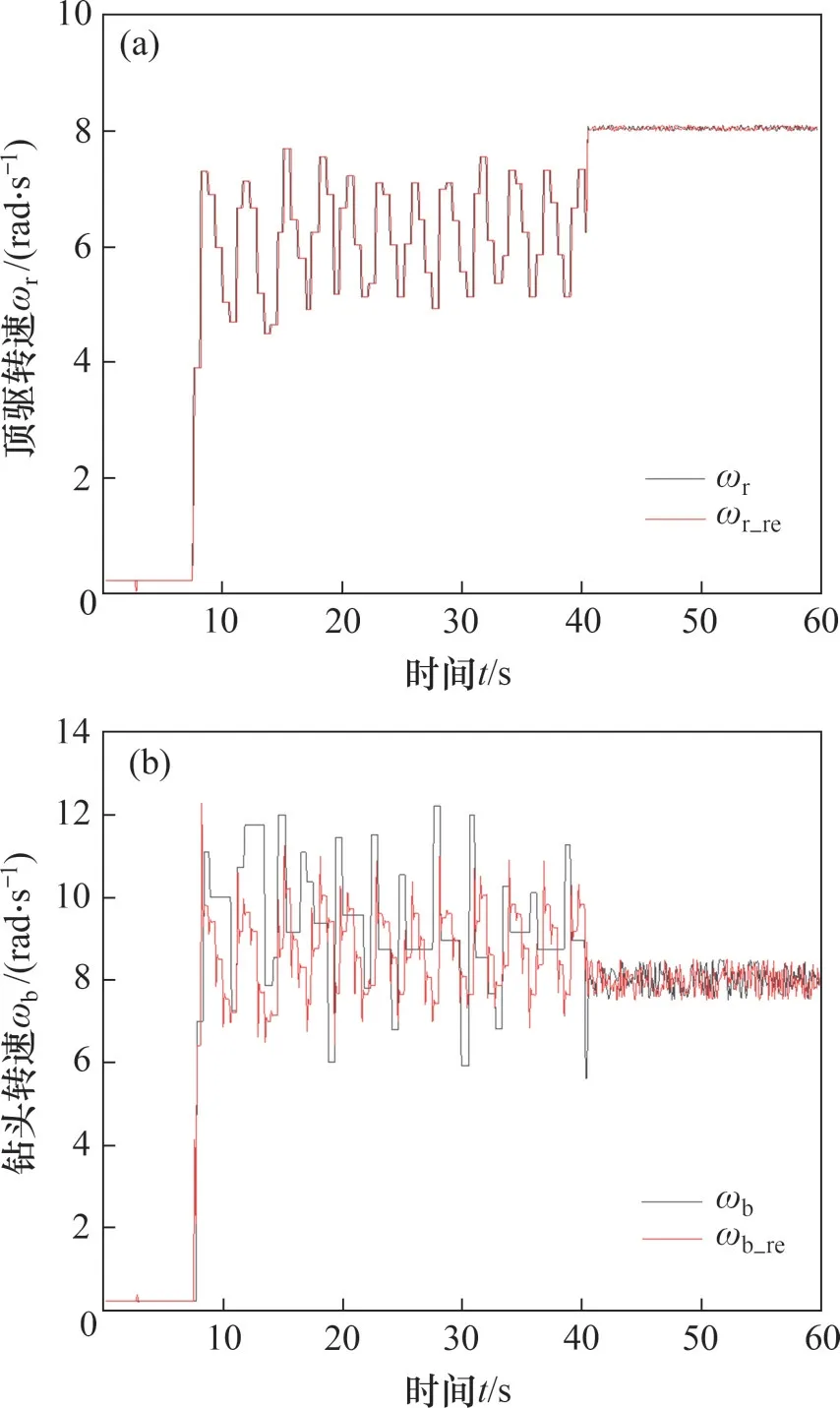
圖10 試驗臺控制效果圖Fig.10 Diagrams of experimental device control effect
黏滑振動模擬試驗臺啟動后在7 s 時出現(xiàn)黏滑現(xiàn)象。從圖10可以看出:未開啟黏滑控制之前,系統(tǒng)出現(xiàn)明顯的黏滑振動現(xiàn)象,頂部轉速出現(xiàn)波動,底部轉速振動程度相對較大;在40 s時開啟黏滑控制算法,頂驅和鉆頭轉速波動逐漸減小,轉速趨于一致,保持在設定轉速附近小幅度波動,黏滑振動控制性能如表2所示。

表2 黏滑振動控制性能Table 2 Control performance of stick-slip vibration
實驗結果表明:黏滑抑制控制前后狀態(tài)重構器對試驗臺頂驅轉速估算相對誤差均值分別為0.29%和0.01%,對鉆頭轉速相對誤差估算均值分別為7.0%和3.07%,當鉆柱系統(tǒng)產生黏滑振動時,控制算法能夠有效控制電機的轉速。試驗臺模擬鉆進時,由于模擬鉆桿和臺架支撐套之間不可避免地存在摩擦,測量儀表及加載裝置也存在測量誤差,故施加黏滑抑制控制后鉆頭鉆速存在小幅波動,但在較大程度上抑制了井下黏滑振動,實驗結果驗證了控制算法的有效性。
5 結論
1)基于非線性摩擦理論,建立了三集中質量鉆柱系統(tǒng)運動方程,采用最優(yōu)阻尼參數(shù),提出了基于龍伯格狀態(tài)重構器的頂驅黏滑抑制控制算法。
2)設計了基于狀態(tài)重構器的PID 控制算法,通過狀態(tài)重構器對頂驅鉆速和井下鉆頭轉速進行估算,實現(xiàn)了閉環(huán)控制,解決了井下參數(shù)無法獲取的難題。
3)設計的基于狀態(tài)重構器的反饋控制算法可在10 s內完成黏滑振動的控制。
4)狀態(tài)重構器對試驗臺鉆頭轉速估算準確,控制算法對井下鉆頭黏滑振動有較好的抑制作用。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業(yè)設計(2022年8期)2022-09-09 07:43:20
艦船科學技術(2022年8期)2022-06-05 07:36:28
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國公路(2017年18期)2018-01-23 03:00:38
數(shù)學物理學報(2017年6期)2018-01-22 02:26:40
