可融合里程計的INS/GNSS組合導航系統設計與試驗分析
2022-04-14 06:50:55崔曉珍周琪武東杰仲訓昱
航空科學技術 2022年2期
崔曉珍 周琪 武東杰 仲訓昱
摘要:為了解決衛星信號被遮擋環境下MEMS-INS/GNSS組合導航漂移問題,對GNSS信號中斷時的MEMS-INS/GNSS系統應如何抑制導航誤差的漂移進行了研究。采用基于誤差狀態的EKF信息融合方法,靈活接入輪式或視覺里程計(OD)的速度約束,建立了一種MEMS-INS/GNSS/OD導航系統。在試驗中,對比分析了加入AHRS和里程計信息對導航定位精度的影響。試驗結果表明,在GNSS間斷環境下,融合里程計能夠克服衛星信號中斷的影響,在GNSS中斷30s時,相較于MEMSINS/GNSS導航系統,定位精度提高了89.70%,且加入AHRS方向約束,能夠更好地抑制定位漂移。此外,接入視覺里程計的MEMS-INS/GNSS/OD系統比接入輪式里程計的系統精度提高了16.11%。
關鍵詞:擴展卡爾曼濾波;衛星拒止環境;慣性導航系統;衛星定位系統;組合導航
中圖分類號:V249文獻標識碼:ADOI:10.19452/j.issn1007-5453.2022.02.013
近年來,隨著小型無人機、無人車的快速發展和應用,為了降低成本,開發低成本的微機電式慣性導航系統(MEMS-INS)成為研究熱點。但是MEMS慣性導航系統存在較大的測量噪聲,并且經過積分會產生累計誤差。因此,當MEMS慣性導航系統單獨使用時,誤差會隨時間的推移快速增大,可能在數十秒的時間內漂移幾十到上百米。為了抑制MEMS-INS誤差,常常需要結合其他外部觀測量進行約束[1-3]。全球導航衛星系統(GNSS)可以在室外環境中提供全天候、全球參考定位,不存在累積漂移的問題。而且我國一直十分關注衛星導航系統的開發,衛星導航系統的定位精度有所保障[4]。因此,為了提高導航定位的性能,通常將GNSS與INS結合使用[5-9],如INS/GPS、INS/BDS組合導航等。但是在高樓、峽谷、叢林區域等復雜環境下,GNSS衛星信號易被遮擋而出現短時中斷,進而導致MEMS-INS/GNSS組合導航的精度受到嚴重影響。為了抑制GNSS信號中斷時MEMS-INS的誤差漂移,需要進一步在MEMS-INS/GNSS組合系統中融合其他位姿測量信息,如常用的視覺里程計或輪式里程計等[10-12]。
針對衛星定位信號中斷問題,本文對可融合里程計(Odometer,OD)的MEMS-INS、GNSS組合導航系統進行設計和試驗分析。主要內容包括:(1)建立基于誤差狀態擴展卡爾曼濾波的MEMS-INS/GNSS/OD融合定位方法,并加入姿態參考系統(AHRS)方向約束,解決姿態漂移和無絕對方向參考的問題;(2)MEMS-INS/GNSS/ OD融合算法支持接入視覺里程計或接入輪式里程計,既可應用于地面無人車導航定位,又可用于實現無人機的視覺輔助INS/GNSS組合導航。
1組合導航系統框架
加入AHRS姿態解算的方向約束的MEMS-INS/ GNSS/OD組合導航系統如圖1所示,其中EKF作為整個組合導航系統的融合算法,OD為里程計(輪式里程計或視覺里程計),GYRO、ACC分別為MEMS-IMU中的陀螺儀和加速度計,MAG為磁力計。


2.1預測過程
首先,根據IMU數據信息建立預測方程,這里將初始時刻IMU的坐標系(ENU)設置為融合坐標系。當獲得其他觀測信息后,再進行系統更新。
預測過程負責向前預測當前狀態和誤差協方差估計,以獲得下一步的先驗估計。則EKF的預測方程為


3試驗結果
3.1試驗平臺
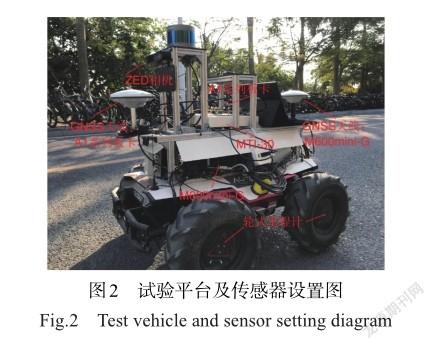
在試驗驗證中,采用的試驗平臺是SCOUT四輪無人車,其配置的IMU、GPS、視覺和輪式里程計等傳感器如圖2所示。計算機為研華工控機ARK-3510L-00A1E,裝配Ubuntu和ROS系統。
測試時使用北云科技研制的A1系列板卡,接收頻率為5Hz的GNSS測量數據,此數據為單點定位數據,定位精度等級為米級;采用的MEMS慣性導航單元為Xsens MTi-30,用來獲取400Hz的加速度和角速度數據。使用的輪式里程計為SCOUT無人車自帶的編碼器測速傳感器;使用 ZED雙目相機設計視覺里程計。
為了試驗分析,使用千尋位置提供的RTK數據并將其輸入司南導航研制的接收機M600mini-G中,獲得頻率為10Hz的厘米級定位,用作測試的參考值。MEMS-INS/ GNSS組合導航系統采用的器件參數見表2。

3.2實地測試
以無人車在校園圍繞建筑行駛一周采集的數據進行測試(起點和終點均在原點處)。測試1:中斷GNSS信號30s,分析MEMS-INS/GNSS/OD系統中有無AHRS方向約束對融合定位精度的影響;測試2:中斷GNSS信號60s,分析接入視覺里程計或輪式里程計,對有AHRS方向約束的MEMS-INS/GNSS組合導航系統定位精度的影響。
3.2.1測試1試驗結果
在這個試驗中,人為使GNSS信號中斷30s,且接入的里程計為輪式里程計,中斷路段為圖中虛線橢圓標出的區域。圖3和圖4中綠色實線為參考定位軌跡,藍色點為既未添加OD速度約束,又未添加AHRS方向約束時的定位軌跡,即MEMS-INS/GNSS系統的定位軌跡;紅色實線表示的是未加入AHRS方向約束,只加入輪式里程計速度約束的定位軌跡,即MEMS-INS/GNSS/OD組合導航系統的定位軌跡;黑色實線表示添加AHRS方向約束的MEMS-INS/ GNSS/OD系統的定位軌跡。
圖3為MEMS-INS/GNSS系統與MEMS-INS/GNSS/ OD系統的融合定位對比圖。通過對比可看出,在MEMSINS/GNSS系統中,GNSS中斷會導致整個組合導航系統產生嚴重的漂移,而加入速度約束的MEMS-INS/GNSS/OD組合導航系統可以抑制位置漂移。圖4為未加入AHRS方向約束的MEMS-INS/GNSS/OD系統和加入AHRS方向約束的MEMS-INS/GNSS/OD系統的融合定位對比圖。圖4的結果顯示,在MEMS-INS/GNSS/OD系統中加入AHRS方向約束,能夠很好地抑制系統的定位漂移。

表3的數據表示在GNSS中斷30s時,無AHRS約束的MEMS-INS/GNSS系統、無AHRS約束的MEMS-INS/GNSS/ OD系統和有AHRS約束的MEMS-INS/GNSS/OD系統,它們的平均定位誤差(MEAN)和均方根誤差(RMSE);以及無 AHRS約束的MEMS-INS/GNSS/OD系統和有AHRS約束的MEMS-INS/GNSS/OD系統,分別相較于無約束MEMS-INS/ GNSS系統,定位精度提高的百分比。在GNSS信號中斷30s的測試結果中,加入速度約束的MEMS-INS/GNSS/OD系統可以將定位精度提高89.70%,加入AHRS的MEMS-INS/GNSS/ OD系統可以將定位精度提高91.15%,且相較于未加入AHRS的系統更加接近參考定位軌跡。

3.2.2測試2試驗結果
對有加入AHRS的MEMS-INS/GNSS組合導航系統進行測試。如圖5所示,綠色實線為參考定位軌跡,藍色點表示MEMS-INS/GNSS系統在GNSS信號中斷60s時的定位軌跡。可以看出,在GNSS信號中斷60s時,系統位置漂移近千米。

輪式里程計的精度主要與傳感器本身精度相關,具有不需要環境信息的特點。視覺里程計需要環境特征點才能進行計算,因此極易受環境影響。在有加入AHRS的MEMS-INS/GNSS組合導航系統中進一步融合輪式里程計和視覺里程計(速度)信息,分析這兩種不同類型的觀測信息對導航精度的影響。
GNSS中斷60s,得到的定位軌跡對比結果如圖6所示。圖中紅色實線表示MEMS-INS/GNSS系統接入輪式里程計的定位軌跡,黃色實線表示MEMS-INS/GNSS系統接入視覺
里程計的定位軌跡。可以看出,在既有AHRS進行方向約束又有速度約束的MEMS-INS/GNSS系統中,該速度約束的信息由視覺里程計提供比由輪式里程計提供的定位效果好。

因為輪式里程計只對自身運動情況有感知,提供的速度值只是x軸方向上的速度值,其橫向和垂向的速度都被設為0,即輪式里程計使用時假設車輛在道路上正常行駛時滿足車輛運動學約束,但實際中存在車輛側滑的現象并不滿足車輛運動學約束,因此在對輪式里程計建模時存在誤差;而視覺里程計能夠感知自身運動造成的外部環境變化,而且提供的速度信息是三維的,并具有方向性。此外,視覺里程計不受車輪打滑、車輛側滑等因素影響,相較于輪式里程計測得的速度值更加準確,所以融合后的結果更加接近參考定位軌跡。在GNSS中斷60s的測試中,對加入AHRS的MEMS-INS/GNSS/OD系統(即已接入輪式里程計或已接入視覺里程計),分別計算了東、北、天向的MEAN和RMSE,定位誤差數據見表4。

計算結果表明,接入視覺里程計的MEMS-INS/GNSS系統比接入輪式里程計的系統在東北天向的精度都有所提高,且接入視覺里程計的系統精度比接入輪式里程計的系統精度提高了16.11%。在GNSS中斷60s內,接入輪式里程計系統的最大誤差為4.65m(行駛距離的5.21%),接入視覺里程計的系統的最大誤差為2.38m(行駛距離的2.74%)。
4結論
本文建立了一種可融入里程計的基于誤差狀態EKF的MEMS-INS/GNSS組合導航系統。試驗結果表明,在MEMS-INS/GNSS中加入里程計的速度值,能夠解決GNSS短期中斷時,組合導航系統的位置漂移問題。在接入輪式里程計的MEMS-INS/GNSS系統中加入AHRS進行方向約束能夠有效提高GNSS信號中斷時組合導航系統的定位精度。在都加入AHRS進行方向約束的MEMS-INS/ GNSS/OD系統中,接入視覺里程計的定位效果比接入輪式里程計的定位效果好。下一步將對EKF中的參數進行優化,并在無人機導航中進行應用測試。
參考文獻
[1]Li N B,Guan L W,Gao Y B,et al. Indoor and outdoor lowcost seamless integrated navigation system based on the integration of INS/GNSS/LIDAR system[J]. Remote Sensing,2020,12(19):21.
[2]Zuo Z,Yang B,Yue C,et al. Study of simulation platform for BDS/INS/CNS deep integration navigation[J]. Mathematical Problems in Engineering,2020,2020(1):1-11.
[3]Chiang K W,Le D T,Duong T T,et al. The performance analysis of INS/GNSS/V-SLAM integration scheme using smartphone sensors for land vehicle navigation applications in GNSS-challenging environments[J]. Remote Sensing,2020,12(11):19.
[4]丁磊,鐘斌,禹強華,等.北斗三頻載波相位組合與相對定位研究[J].航空科學技術, 2018, 29(1):16-24. Ding Lei, Zhong Bin, Yu Qianghua, et al. Research on phase combination and relative positioning of beidou tri-frequency carrier[J]. Aeronautical Science & Technology, 2018, 29(1): 16-24. (in Chinese)
[5]楊兆,沈作軍.基于擴展卡爾曼濾波的小型固定翼無人機姿態估計方法分析[J].航空科學技術, 2017, 28(11):15-21.Yang Zhao, Shen Zuojun. Analysis of attitude estimation method for small fixed-wing UAV based on extended Kalman filter[J]. Aeronautical Science & Technology, 2017, 28(11):15-21. ( in Chinese)
[6]Zhang C,Zhao X B,Pang C L,et al. Adaptive fault isolation and system reconfiguration method for GNSS/INS integration[J]. IEEEAccess,2020,8:17121-17133.
[7]Zhou J C,Traugote J,Scherzinger B,et al. A new integration method for MEMS based GNSS/INS multi-sensor systems[C]// Proceedings of the 28th International Technical Meeting of the Satellite Division of the Institute of Navigation(Ion Gnss+ 2015),2015:209-218.
[8]Fu L,Hu C Q,Kong L B. A sea-sky line detection aided GNSS/INS integration method for unmanned surface vehicle navigation[C]// Proceedings of the 30th International Technical Meeting of the Satellite Division of the Institute of Navigation(Ion Gnss+ 2017),2017:1809-1815.
[9]Lefferts E J,Markley F L,Shuster M D. Kalman filtering for spacecraft attitude estimation[J]. Journal of Guidance Control and Dynamics,1982,5(5):417-429.
[10]Reimer C,Muller F J,Hinuber E L V. INS/GNSS/Odometer data fusion in railway applications[C]//2016 DGON Intertial Sensors and Systems(ISS). IEEE,2016.
[11]Ragab M M,Ragab H,Givigi S,et al. Performance evaluation of neural network based integration of vision and motionsensorsforvehicularnavigation[C]//Autonomous Systems:Sensors,Processing and Security for Vehicles & Infrastructure 2019,2019.
[12]肖堯,阮曉鋼,朱曉慶,等.一種微型無人機單目視覺SVO/ INS組合導航方法[J].中國慣性技術學報, 2019(2):211-219. Xiao Yao, Ruan Xiaogang, Zhu Xiaoqing, et al.A monocular vision SVO/INS integrated navigation method for miniature unmanned aerial vehicle is proposed[J]. Journal of Chinese Inertial Technology,2019(2):211-219. (in Chinese)
Design and Experimental Analysis of INS/GNSS Integrated Navigation System with Odometer
Cui Xiaozhen1,Zhou Qi2,Wu Dongjie1,Zhong Xunyu1
1. Xiamen University,Xiamen 361102,China
2. AVIC Xi’an Flight Automatic Control Research Institute,Xi’an 710065,China
Abstract: In order to solve the problem of MEMS-INS/GNSS integrated navigation drift in the environment where the satellite signal is blocked, how to suppress the drift of the navigation error when the GNSS signal is interrupted is studied. Using the EKF information fusion method based on the error state and flexibly accessing the velocity constraints of wheel or visual odometer (OD), a MEMS-INS/GNSS/OD navigation system is established. In the experiment, the influence of adding AHRS and odometer information on the accuracy of navigation and positioning is compared and analyzed. The test results show that in the GNSS intermittent environment, the fusion odometer can overcome the influence of the satellite signal interruption. When the GNSS is interrupted for 30s, the positioning accuracy is increased by 89.70% compared with the MEMS-INS/GNSS navigation system, and the AHRS direction constraint can better suppress positioning drift. In addition, the accuracy of the MEMS-INS/GNSS/OD system using the visual odometer is improved by 16.11% than that of the wheeled odometer.
Key Words: extended Kalman filter; satellite-jamming environment; INS; satellite positioning system; integrated navigation
Received: 2021-07-15;Revised: 2021-09-19;Accepted: 2021-11-18 Foundation item: Aeronautical Science Foundation of China (201908068003)