基于VR技術的風景園林環境層次規劃設計
2022-04-14 07:13:46郭小曼
許昌學院學報 2022年2期
郭小曼
(合肥濱湖職業技術學院 建筑工程與設計學院,安徽 合肥 230601)
在計算機圖像處理環境下進行風景園林環境層次規劃設計能夠提高規劃藝術的表達能力和視覺傳達能力,在城市空間規劃建設等方面具有重要意義[1].芮瀟等[2]基于群智優化路徑技術,通過創建園林應用環境圖,采用Dijkstra最短路徑算法和群體智能優化算法對Dijkstra最短路徑算法對園林道路規劃進行改進,雖然規劃效率較好,但視覺表達效果仍有待提高.王巧良等[3]提出城市公園的設計應融入環保理念,步道旅游線路應滿足環境的教育功能,但存在模糊度較大、層次辨識能力較差等缺點.基于此,為了有效提高風景園林環境層次規劃,提出基于VR技術的風景園林環境層次規劃設計方法,采用聯合結構相似性特征分析風景園林圖像特征,結合虛擬現實的特征結構重組和增強技術,實現對風景園林環境層次規劃優化設計.
1 風景園林環境層次規劃視覺采樣和特征分析
1.1 風景園林環境層次規劃視覺采樣
為了實現基于VR技術的風景園林環境層次規劃設計,采用虛擬現實成像技術實現對風景園林環境層次規劃的視覺圖像采集,風景園林環境層次規劃結構模型如圖1所示.
圖1 風景園林環境層次規劃結構
根據風景園林環境層次規劃結構,采用空間區域特征匹配方法,進行風景園林環境層次規劃和特征分析,提取風景園林環境層次參數,將區域像素融合后得到風景園林環境層次規劃的統計特征量.將環境層次規劃藝術圖像的信息增強處理后,計算風景園林環境層次規劃的相關特征分布集,就得到風景園林環境層次規劃的三維區域重構為
(1)


(2)
式中,H(φ)為聯合結構相似性分塊Heaviside函數,δ(z)是提取風景園林環境層次規劃的類信息損失特征分量.
1.2 風景園林環境層次特征分析
采用聯合結構相似性特征分析方法,實現對風景園林環境層次規劃的結構像素特征分析,得到景園林環境層次融合的空間匹配特征集[5].在Dropout層和批歸一化層,得到風景園林環境層次規劃的虛擬視覺圖像I(x,y)在成像區域的仿射不變參數,用雅克比矩陣J(x,y,σ)表示,得到風景園林環境層次規劃虛擬視覺融合的特征分割矩陣為
J(x,y,σ)=I(x,y)+W+H(x,y,σ).
(3)
采用多任務學習的參數融合方法,得到風景園林環境層次規劃的二階灰度矩陣H(x,y,σ),風景園林環境層次規劃虛擬視覺圖像的灰度像素,為
rm=J(x,y,σ)+[f(v)+H(x,y,σ)],
(4)
式中,f(v)為多種監督學習方法參數.通過對圖像尺度進行分割,得到風景園林環境層次規劃虛擬視覺圖像的特征分割模型[6],特征分割的中心矩M表示為
M=f(v)+‖F+G‖+rm.
(5)
通過降采樣操作,得到風景園林環境層次規劃的虛擬視覺圖像的邊緣像素集為F,灰度圖像為G.采用度量學習的方法,得到風景園林環境層次規劃的自相關特征分量為

(6)
式中,q(x)為風景園林環境層次規劃的虛擬視覺圖像特征提取結果輸出,σ為風景園林環境層次規劃的聯合多個監督信息損傷參數.因此,為了實現對風景園林環境層次規劃的結構像素特征分析,根據風景園林環境多樣性的圖片結構特征分布,并結合虛擬現實的特征結構重組和增強技術來實現風景園林規劃的優化設計.
2 風景園林環境層次規劃設計優化
2.1 風景園林環境層次規劃虛擬現實重構
采用虛擬現實重構技術,得到風景園林環境層次規劃虛擬的視覺圖像的邊緣輪廓特征檢測模型,并結合虛擬現實的特征結構重組和增強技術,對風景園林環境層次規劃過程中的層次進行優化控制和尋優[7].為了構建風景園林環境層次規劃虛擬視覺圖像的角點分布模型,風景園林環境層次規劃的相似度特征量滿足
f=Km+Ab(k)+q(x),
(7)
式中,Km表示風景園林環境層次規劃的網格分塊軌跡.對風景園林環境層次規劃特征量進行模糊融合,得到風景園林環境層次分布圖像I(x,y)中的灰度像素序列

(8)
將X,Y,Z三維邊緣像素特征分量映射到X1,Y1,Z1中,得到風景園林環境層次規劃的虛擬重構結果,風景園林環境層次的視覺圖像S大小為H×L.采用紅外和射頻橫向掃描技術進行風景園林環境層次規劃,得到模糊搜索次數為Qs(r).使用粗糙集特征匹配方法,實現風景園林環境層次規劃的虛擬視覺重組,輸出的聯合關聯約束特征量為
y(w)=‖df(k)+dfi,j(k)‖+T,
(9)
式中,df(k)和dfi,j(k)分別是風景園林環境層次規劃虛擬視覺圖像的差異度系數.因此,為了實現風景園林環境層次規劃的藝術特征表達,采用深度學習方法,對風景園林環境層次進行規劃設計.
2.2 風景園林環境層次規劃實現
采用聯合度量和多層次融合方法,對風景園林環境層次規劃進行優化設計,得到風景園林環境層次分布的紋理結構特征量為

(10)
式中,OV為自適應紋理渲染參數,OP為風景園林環境層次規劃的邊緣輪廓的小波域系數,在信息中心vi得到風景園林環境層次規劃的視覺差.
采用視覺偏移修正方法,得到風景園林環境層次規劃的色差補償函數為

(11)
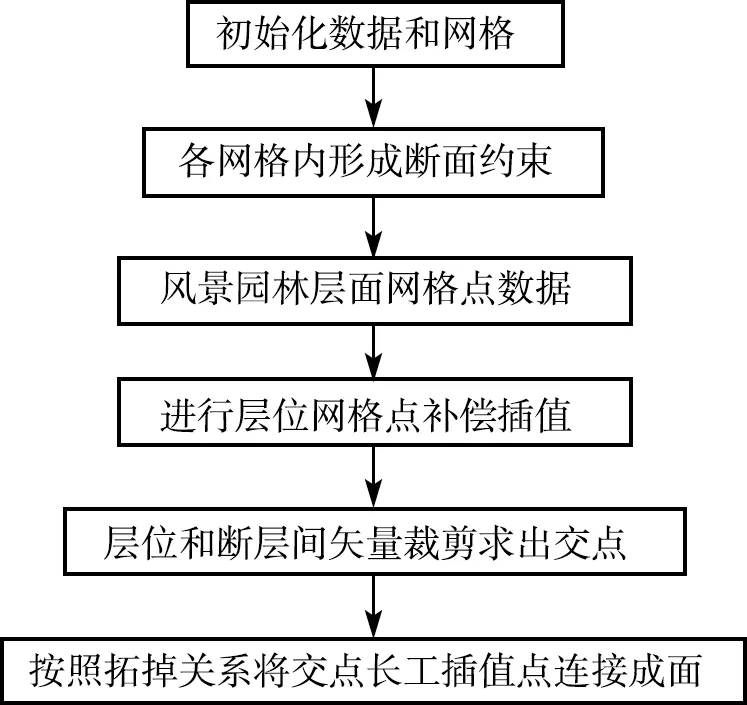
圖2 風景園林環境層次規劃設計的流程
式中,n=1,2,…,T,表示風景園林環境層次規劃虛擬視覺圖像的色差修正迭代步數,u(n)(x,y,d)表示風景園林環境層次規劃虛擬視覺圖像融合的自相關特征匹配集[8].
采用Gabor小波變換獲取風景園林環境層次規劃虛擬視覺圖像的模糊隸屬度特征集u={uik},在多層像素分布結構區域[9],得到風景園林環境層次紋理結構,可以用公式(12)表示為
(12)

綜上分析,采用虛擬現實重構技術,能夠實現對風景園林環境層次規劃設計,結構流程如圖2所示.
3 仿真實驗與結果分析
3.1 仿真實驗
為了驗證該方法在實現風景園林環境層次規劃設計中的應用性能,需要進行實驗測試分析.風景園林環境層次規劃擬視覺采樣的像素強度為200 dB,圖像虛擬現實增強的最大迭代尺度Gmax=30,風景園林環境層次的分布維數D=12,特征分布的壓縮比ICR=64×8/10=51.2.根據上述參數設定,采用Vega Prime實現的環境效果模擬,在Multigen Creator建模下實現風景園林環境層次規劃的三維視覺重構,得到視景仿真界面,如圖3所示.在該視景仿真界面中,還需要采用虛擬現實重構技術對風景園林環境進行層次融合處理.
在“合肥市風景園林景觀規劃設計”項目中,構建社區廣場的設計樣本,場景的主要三維對象分別為草地、綠化帶植物和寬闊地帶.應用VR技術得到風景園林環境層次規劃設計,如圖4所示.經過分析可以看出,采用該方法能夠優化風景園林環境層次規劃設計,并有效提高風景園林環境層次規劃的虛擬現實重構能力.
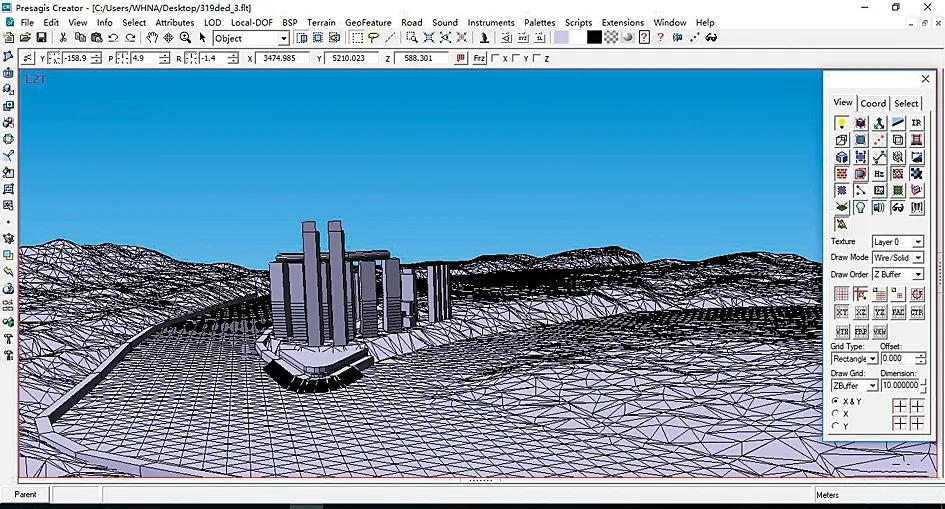
圖3 風景園林環境層次規劃的視景仿真界面
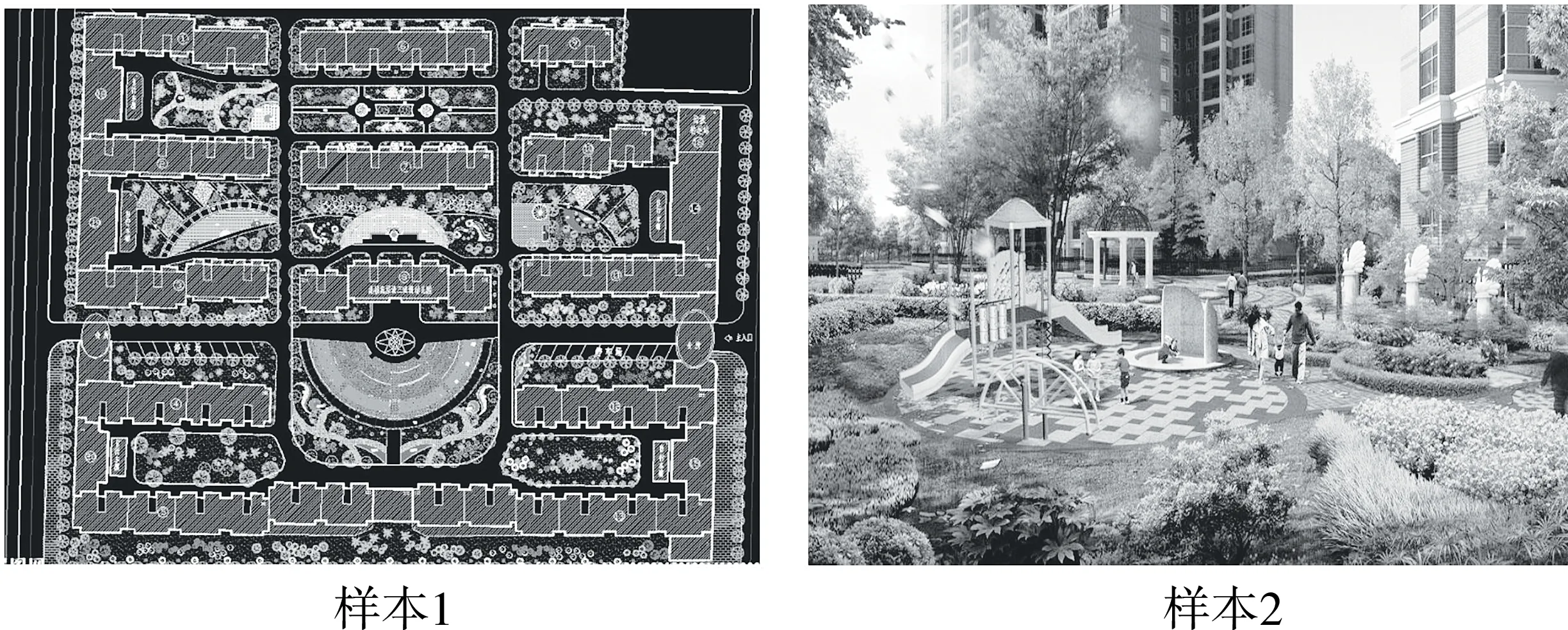
圖4 風景園林環境層次規劃設計樣本

圖5 風景園林環境層次規劃 的色差敏感度測試對比
3.2 結果分析
為了驗證VR技術的有效性,與文獻[2]、[3]方法進行對比,測試不同方法對風景園林環境層次規劃設計的色差敏感度,如圖5所示.可以看出,文獻[2]方法的色彩敏感度平均值為65%,文獻[3]方法為60%,仿真實驗所提方法為80%.經過對比可以看出,所提方法規劃的風景園林環境的色彩敏感度較好,設計的融合度水平較高.所提方法采用VR技術的特征結構重組和增強技術能夠獲取風景園林環境的結構特征分布,而且聯合度量和多層次融合方法聯用還能夠實現風景園林環境的層次規劃,并有效提升風景園林環境重構的視覺表達效果.
4 結語
基于VR技術的風景園林環境層次規劃設計方法能夠提高風景園林環境層次規劃設計的三維重構能力及視覺效果.根據風景園林環境多樣性的圖片結構特征分布,結合虛擬現實的特征結構重組和增強技術,采用聯合度量和多層次融合等多種方法,對風景園林環境層次規劃優化設計.仿真結果表明,使用該方法進行風景園林環境層次規劃設計的三維重構能力較好,而且視覺表達效果較強,能夠有效提高規劃和設計效果.
在研究過程中,所提方法未考慮風景園林環境規劃的時長,在風景園林環境層次規劃效率方面仍有提升空間.未來研究應該從提升規劃效率的角度出發,進一步完善基于VR技術的風景園林環境層次規劃方法.
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
中國生殖健康(2019年11期)2019-01-07 01:28:02
領導決策信息(2018年50期)2018-02-22 06:17:16
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16