基于S7-1200 PLC的小型水稻催芽控制系統設計*
2022-04-15 09:11:18周育輝
南方農機 2022年8期
周育輝 , 孫 濱
(1.江西生物科技職業學院,江西 南昌 330200;2.泰山職業技術學院,山東 泰安 271000)
0 引言
水稻是我國的第一大糧食作物,其種植方式影響著水稻的產量。隨著農業現代化的發展,水稻的插秧大都實現了機械化,而插秧機械化中關鍵的一項是有標準一致的秧苗,標準化育秧的前提是水稻出芽的良好性。水稻的催芽就是人工采取一定的手段,保證水稻處于合適的溫度、水分和空氣環境中,人為營造出適合水稻發芽的良好條件,從而使水稻能夠盡早發芽,整齊出芽。通過自動控制發芽流程,可以避免自然發芽時外界不良氣候的影響,從而提高出苗效率,增強生產能力,達到防止爛種、爛芽,提高秧苗整齊度和成秧率,節省種子的目的[1-2]。
傳統的水稻催芽方法依賴于人的經驗和人為操作,造成在催芽過程中有很多不可控因素,同時生產流程不規范,溫度控制不精確,使水稻發芽出現燒芽、爛種等問題,容易浪費大量的人力物力,不能滿足現代化農業的需要。因此,設計智能化的水稻催芽器對于實現水稻的現代化、規模化、機械化種植具有重要的意義。本研究利用溫度傳感器、S7-1200可編程控制器、觸摸屏實現了水稻催芽環境控制系統的軟硬件設計,利用模糊PID控制算法實現水稻催芽流程溫度的精確控制要求,實現了催芽控制系統的優化控制,使水稻催芽有一個合適的環境,提高了自動化程度。
1 系統結構組成
水稻催芽基本流程包括熱水-浸種熱備、水稻浸種、水稻破胸作業、催芽過程、催芽結束排水等。在現代水稻催芽過程中,要求整個催芽過程實現精準、智能化控制,以提高水稻的出芽率,降低人工勞動強度,因此對水稻催芽過程的時間、整齊性、自動化程度有更高的要求。為實現上述目標,采用智能控制及傳感器技術在整個流程中對種箱的水位、水溫、噴淋增氧等進行智能化控制,并針對異常情況進行報警。系統的總體結構如圖1所示。
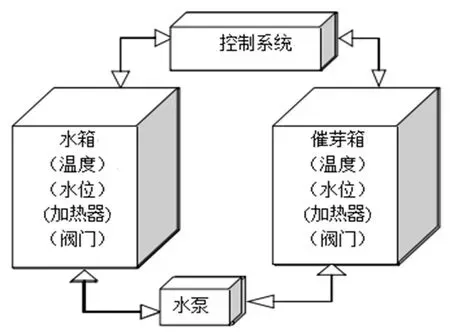
圖1 系統組成框圖
2 水稻催芽控制系統設計硬件方案
根據小型水稻催芽系統的智能控制要求,要求系統能夠長時間可靠運行,并能實現對催芽流程的自動控制。經過實際現場分析,采用了以PLC為控制核心的控制系統。根據實際控制需要在種箱內設置4個溫度傳感器、2個水位傳感器、1個水箱加熱器,外部通過水泵、電動閥門實現水循環、進水、排水。其硬件電路組成框圖如圖2所示。
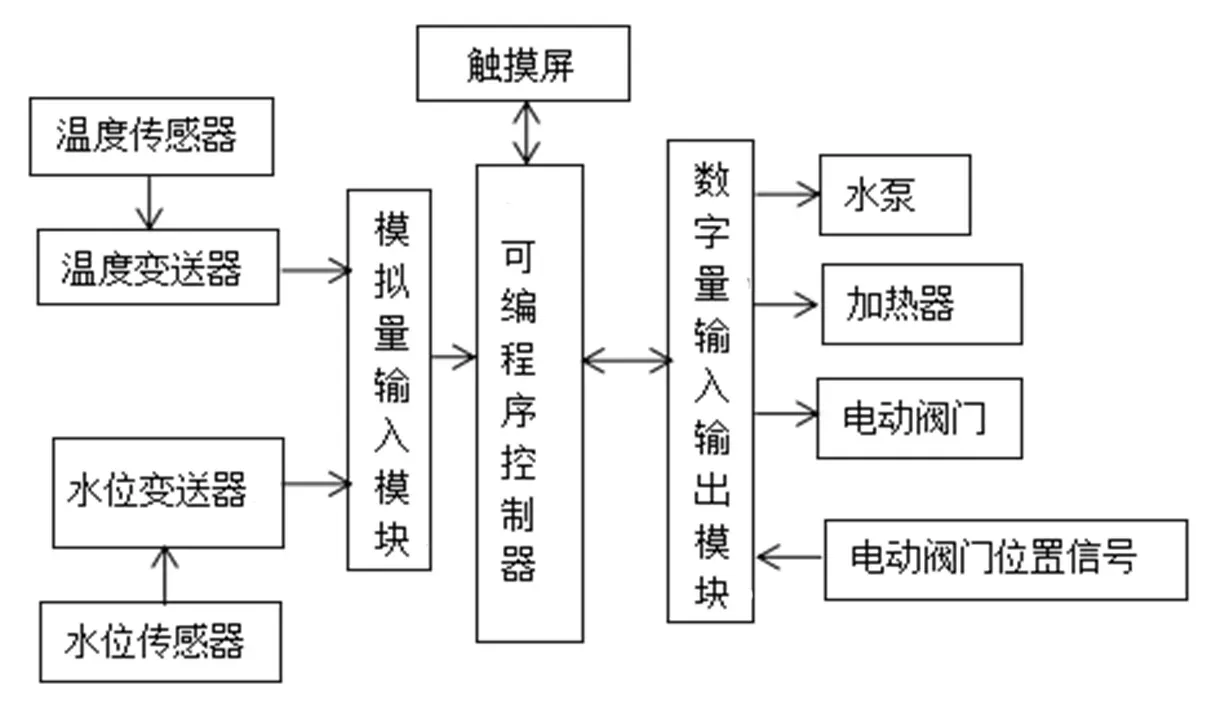
圖2 系統硬件組成框圖
2.1 控制核心PLC
水稻催芽控制系統的硬件選型根據現場實際控制需要,對所需要的IO點數、模擬量輸入輸出數量及精度、安裝方式等進行合理選擇。根據分析,整個系統需要開關量輸入信號10個、開關量輸出信號6個以及采集溫度信號的模擬量輸入信號4個,屬于小型控制系統[3-5]。因此,從實用性、可擴展性等方面考慮,PLC選用西門子的S7-1200 1214C。該控制器是一種中低端緊湊型控制器,可以與HMI及其他自動化組件進行通信,方便于整個控制系統功能的實施。
2.2 模擬量輸入模塊
系統要求采集水溫,以滿足系統需要及后續擴展使用,采用SM1231的8路熱電阻測量模塊,帶有8路模擬量輸入,其分辨率可以達到0.1 ℃。
2.3 溫度傳感器和溫度變送器
根據現場實際需要,水溫采集所用的溫度傳感器為Pt100 溫度傳感器,其為正溫度系數熱敏電阻傳感器,由于其測溫精度高、穩定性好且測溫范圍廣等特點,是-200 ℃~650 ℃中低溫檢測常用的檢測器,并且無需放大器即可直接連接到溫度變送器模塊上。
溫度變送器采用了西門子的SITRANS TH100溫度智能變送器。溫度傳感器Pt100經過智能變送器,直接輸出與溫度成正比的4 mA ~20 mA的直流電流。
2.4 液位變送器
采用SIEMENS液位變送器7ML5221-1DB11。其為一種超聲波變送器,采用2線回路供電,用于對明渠、儲存容器和簡單過程容器中的液體進行液位、體積和流量監測,易于安裝和啟動,具有信噪比極高、自動虛假回波抑制等優點,適合本系統需要。
2.5 人機界面——觸摸屏
為實現人機交互,直觀顯示測量結果及調整控制參數,選取西門子的TP700精致型觸摸屏。這樣整體利用博途軟件進行硬件組態及程序設計。其整體硬件組態如圖3所示。
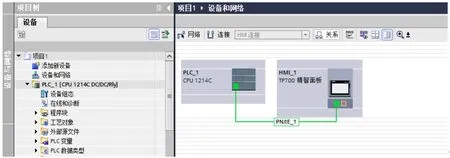
圖3 硬件組態圖
3 水稻催芽控制系統軟件設計
由于水稻催芽過程中對水溫的控制要求很高,并且種箱一般體積比較大,對其的控制具有大滯后、時變性的特點,并且沒有合適的數學模型,采用常規的PID控制,其比例、積分、微分三個參數不方便確定,調試困難,不易達到很好的控制效果[6-8]。利用模糊控制可以很好地解決上述問題,抑制溫度等多種環境參數產生的耦合效應,提高控制效果。本研究將模糊控制與常規PID控制相結合,結合兩者的優點,實現系統控制要求。整個系統軟件設計主要核心是兩個部分:1)PLC控制程序設計;2)模糊PID控制器設計。
3.1 PLC控制程序設計
PLC主要根據控制參數要求進行整個催芽流程的閉環控制。其工作流程如圖4所示。
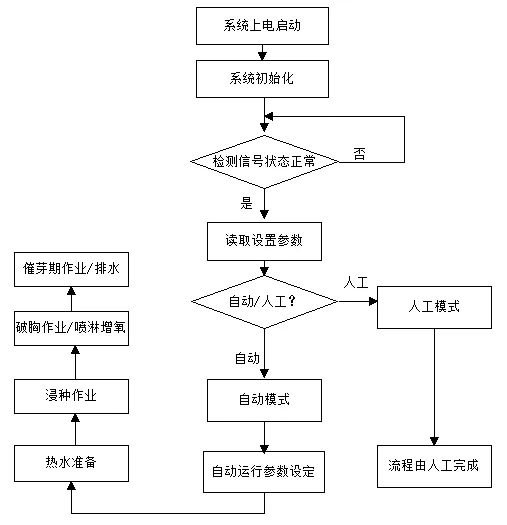
圖4 PLC整體控制流程圖
3.2 模糊PID控制器設計
在浸種、破胸、催芽工作流程中,為滿足催芽需要,對水溫的要求比較高。如果水溫不符合催芽過程中的階段要求,會出現出芽時間慢、燒芽等問題。并且水稻催芽種箱體積比較大,催芽時間長,不同階段所需水溫多變,因此控制系統采用常規PID控制很難達到好的控制效果。為達到催芽過程中水溫的控制精度要求,綜合應用PID控制和模糊控制,其基本結構如圖5所示。
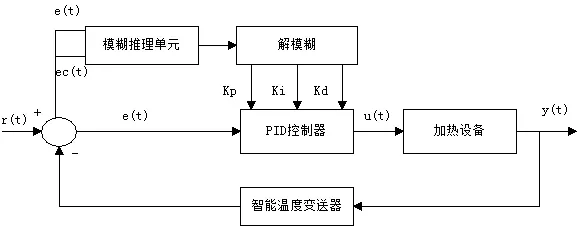
圖5 模糊PID控制結構圖
在本設計中系統根據溫度傳感器采集到的溫度數據和設定的溫度進行計算,得到溫度誤差e(t)和誤差變化率ec(t)。將溫度誤差和誤差變化率以及被控制輸出量進行模糊化,形成模糊子集{NB、NM、NS、NO、PS、PM、PB},其量化論域為{-3,-2,-1,0,1,2,3}。
根據實際工藝的要求及以往的工作經驗,得出ΔKp、ΔKi、ΔKd模糊控制規則表。由于篇幅所限,本文僅列出ΔKp的模糊控制規則表,如表1所示。
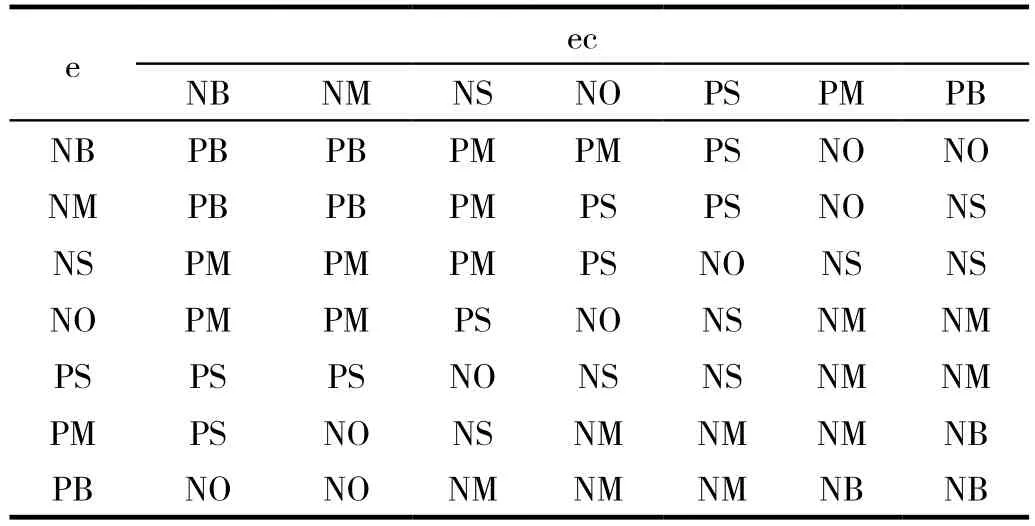
表1 ΔKp的模糊控制規則表
根據模糊控制器得到的數值是不確定的模糊值,為實現系統的精確控制,通過最大隸屬度原則將不確定的值變成確定數值。這樣可以得到模糊控制器輸出的比例、積分、微分三個參數的實時增量ΔKp、ΔKi和ΔKd。通過計算公式可以獲得PID控制器所需要的比例、積分、微分參數,計算公式為:
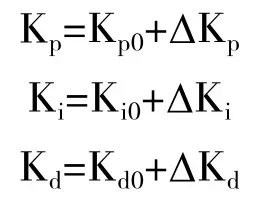
其中,Kp0、Ki0、Kd0為PID控制器的初始參數。
利用計算得到PID控制的三個參數,進行PID運算,得到對加熱器的控制信號,控制加熱器的加熱溫度在催芽流程要求的波動范圍內。系統控制結構圖如圖6所示。
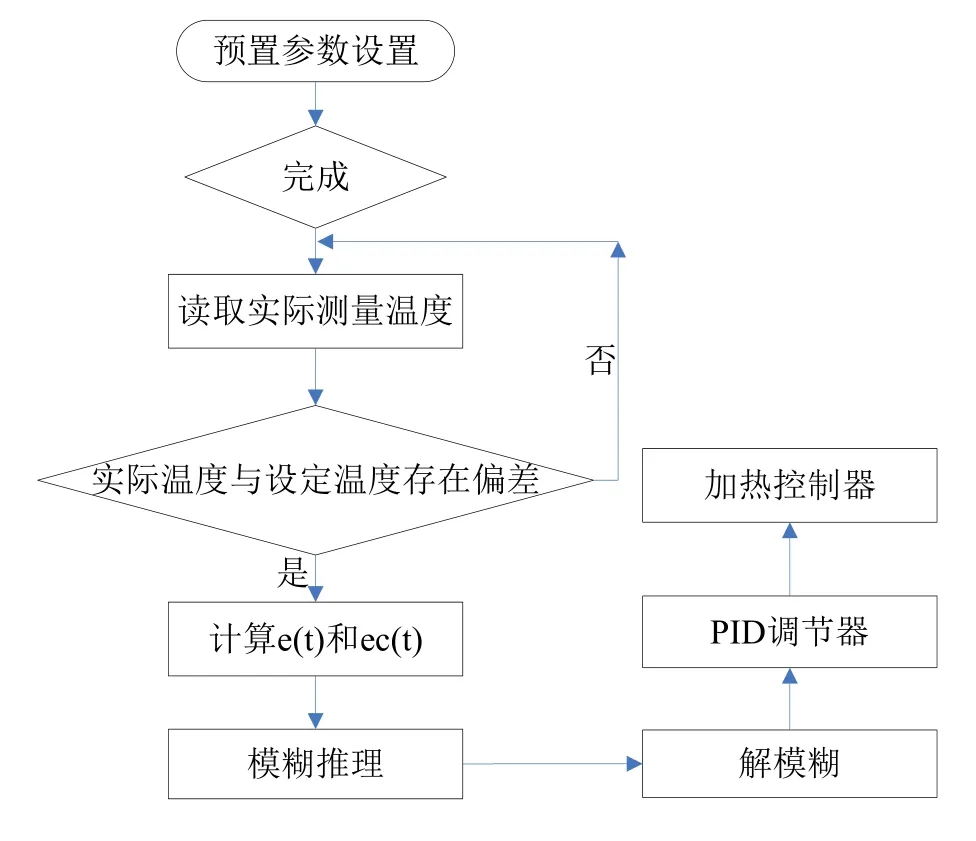
圖6 模糊PID溫度控制流程圖
4 觸摸屏界面設計
為方便現場用戶設置系統參數,需要有良好的人機交互界面。系統選擇了觸摸屏。觸摸屏利用博途軟件進行畫面設計。通過觸摸屏和PLC進行通信,傳遞采集的現場數據,并將用戶設置參數下發至PLC。觸摸屏畫面主要包括參數設置、現場數據采集、人工操作、故障報警等。系統界面如圖7所示。可以通過上面的按鈕在各個界面上進行切換,實現了良好的人機交互。
5 系統運行調試
利用博途完成了軟件設計后,將 系統安裝在一個小型育種室內進行試驗,驗證系統設計的可行性和可靠性。該控制系統由操作人員根據催芽要求,在觸摸屏上設定好溫度、時間等相關參數。進行自動及手動運行,并觀察系統運行過程是否與實際設定動作一致,報警信號是否及時發出。經過實際測試,整個系統能夠按照設計流程可靠運行,滿足用戶需要。
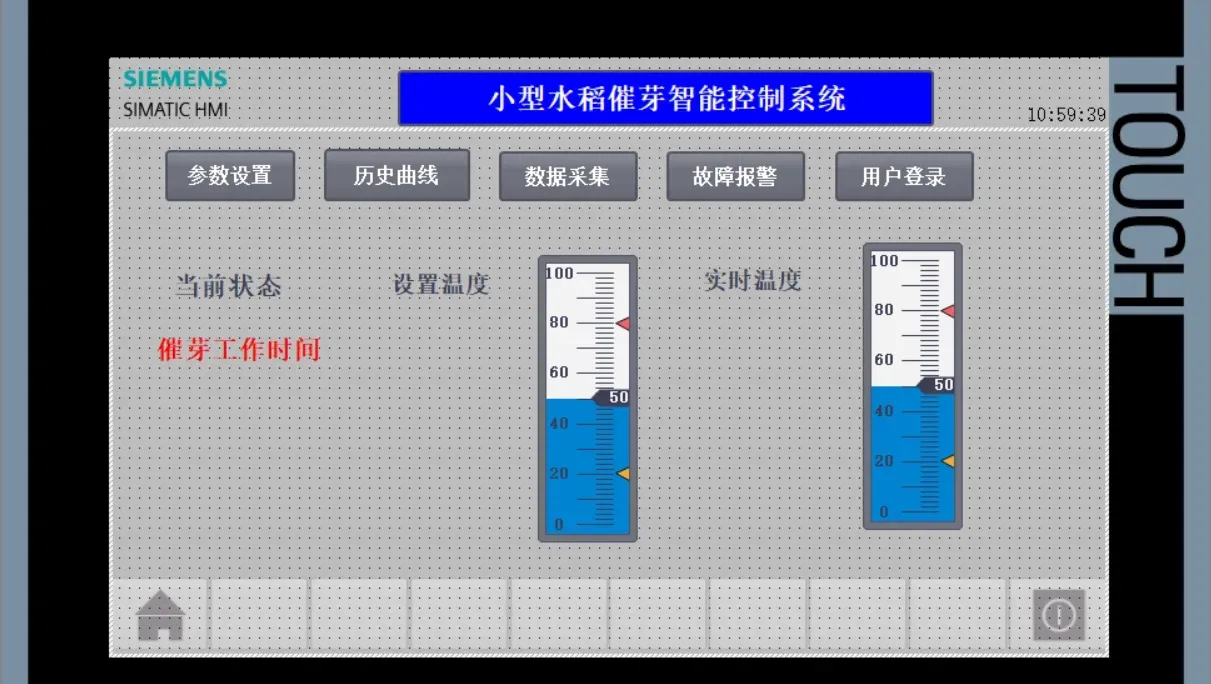
圖7 系統人機界面
6 結束語
本系統主要根據小型水稻催芽的實際需要,利用S7-1200、觸摸屏、溫度變送器、電動閥門等控制器件,實現了水稻催芽流程的智能化控制[9-10];根據催芽環境的實際要求,利用模糊PID算法實現了催芽水溫的準確控制;本系統簡單、實用,便于推廣。
猜你喜歡
青少年科技博覽(中學版)(2022年6期)2022-12-27 19:44:27
工業設計(2022年8期)2022-09-09 07:43:20
今日農業(2021年21期)2021-11-26 05:07:00
軍事文摘(2021年22期)2021-11-26 00:43:51
今日農業(2021年14期)2021-10-14 08:35:40
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
文苑(2020年6期)2020-06-22 08:41:52
裝備制造技術(2019年12期)2019-12-25 03:06:46
文苑(2019年22期)2019-12-07 05:29:00