重型車輛自動駕駛氣制動自適應控制研究
2022-04-18 17:39:20黃露姚麗楊易黃贊銘周怡安
時代汽車 2022年7期
黃露 姚麗 楊易 黃贊銘 周怡安
摘 要:重型車輛氣制動自適應控制是一項重要的自動駕駛縱向速度控制功能,在應用中至關重要,例如上下坡勻速行駛、精準停車、不同載重的車速控制等。由于典型氣動制動系統是固有的非線性特性,存在很大的不確定性,且重型汽車的縱向剎車控制受負載、路況、車況的影響較大,傳統的PID控制器無法滿足不同工況下重型車輛自動駕駛車速穩定控制要求。本文描述了重型汽車在自動巡航控制下氣制動系統因車況不確定因素導致的制動力不足問題,提出一種基于氣制動系統的自適應剎車控制模型,詳細說明氣制動自適應控制模型的優勢、推導過程,以及問題解決的具體應用案例,并給出了完整的數據分析和試驗驗證過程。
關鍵詞:重型車輛 氣制動 模型參考自適應控制 PID 自動駕駛
1 引言
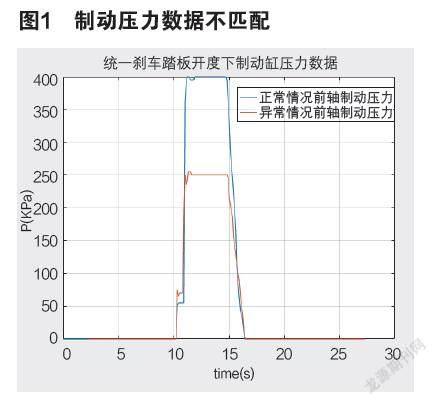
隨著重型汽車(半掛卡車、貨車、巴士等)的自動駕駛技術研究開始興起、迭代和特定場景下的應用,汽車自動駕駛技術的研究近年來在國內外取得了巨大的進展。重型汽車的自適應巡航控制在應用中至關重要,不僅可以減輕駕駛員的負擔,還可以使汽車的燃油供給和發動機功率間的配合處于最佳狀態,有效地降低燃油的消耗和排氣污染。因此,對汽車自適應巡航控制系統的研究具有重要意義。但是,重型汽車的縱向剎車控制受負載、路況、車況的影響較大。重型汽車的剎車系統一般采用氣制動,存在典型氣制動系統特有的非線性,且氣制動系統在使用過程中,由于機件磨損或損壞,制動性能會下降,容易產生故障,危及行車安全。尤其對于重型車輛的自動駕駛系統,對車輛的剎車制動性能要求更加嚴格,一定程度的制動性能下降將導致自動駕駛系統無法良好實現車速平穩控制。因為重型汽車自動駕駛的制動減速控制采用電子制動踏板替代駕駛員的操作,通過電子制動踏板的開度控制制動閥打開輸入足量的氣壓推動制動缸產生制動力,從而使車輪制動,車輛減速或停車。自動控制車輛完全停車或者以某一速度巡航是車輛縱向控制功能之一。特別是,重型汽車某些場景下必須能夠施加非常精細的制動控制,以便準確地停在指定的地點。重型車輛氣制動系統氣壓制動不良故障主要體現在重型汽車行駛過程中,實施制動時,車輛不能在短距離內減速停車,具體表現為制動失靈。通過對制動系統壓力的分析發現,制動失靈的主要原因是輸送到制動分泵的壓縮空氣壓力不足,從而使得制動分泵產生的制動力不足。導致制動壓力不足問題的主要原因有:制動踏板自由行程過大、制動閥的供氣量不足、管路漏氣堵塞等任一情況出現。相同的制動閥開度對應的制動缸壓力數據如下圖1所示,數據的結果顯示同一制動壓力目標(即相同制動閥開度)下,因管路堵塞導致制動缸壓力不足。
目前國內外對重型車輛縱向控制的研究重點關注高速隊列控制[1]和自適應巡航控制[2]。與車輛停車或精準制動控制相關的研究僅限于防抱死制動系統(ABS)[3]、車輛穩定性[4]或液壓制動器[5]等。重型車輛基于氣制動系統因自身原因導致制動力不足的控制器設計沒有得到充分的研究。
本文對自動駕駛輸出的制動力不足導致無法精準停車或精準速度控制問題進行詳細的分析,建立基于制動壓力的自適應控制模型,詳細分析和推導了自適應模型的設計過程。采用模型參考自適應控制(MRAC)設計方法設計制動缸實際制動壓力和目標制動壓力的自適應律,通過調整控制模型的輸出,嘗試解決自動駕駛時氣制動系統因制動閥問題導致制動力不足的問題。
本文介紹的應用實例是18米長的柳汽T7重卡帶掛車輛在長沙智能網聯測試區的實車測試驗證。通過對算法模型進行推導和實車測試,對比自適應控制模型加入前后的制動缸壓力實測數據,多方面的測試結果驗證了制動系統的實際輸出壓力和目標制動壓力基本匹配,帶掛卡車滿足控制目標減速停車要求。
2 重型汽車縱向動力學模型
沿車輛縱向的力平衡方程式如下[6]:
m x..=F x-F aero-R x-mg sin(θ) (1)
式中Fx為輪胎縱向力,Faero為縱向空氣阻力,Rx為縱向滾動阻力,m為車輛質量,g為重力加速度,θ為車輛行駛的坡度。本文主要研究氣制動的制動力控制,主要考慮的是Fx為制動時輪胎的縱向力,暫不考慮縱向空氣阻力、縱向滾動阻力和重力的影響。車輛制動時產生制動力Fx作用于式(1),車輛產生加速度x..使車輛減速(x..<0)。氣制動缸產生制動力公式:Fx=PS,S為制動缸活塞的有效面積,P為制動缸的壓力,根據壓力傳感器測量獲得。根據以上公式可得到車輛制動時加速度與制動缸壓力的關系。重型汽車氣制動的基本工作原理本文不再贅述,下面主要描述自動駕駛系統計算縱向加速度的過程。
目前車輛巡航控制系統典型算法是使用速度誤差作為反饋的PID控制器[6]:
x..des(t)=-kp(vx-vref)—ki ∫t0(vx-vref)dt-kd[(ek-ek-1)] (2)
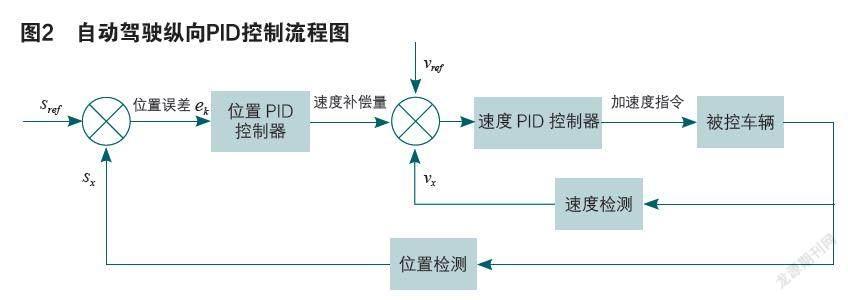
式中Vx為本車當前速度,Vref為期望的速度,ek為當前的速度誤差,ek-1為上周期的速度誤差。此算法只考慮期望的速度跟隨,在重型汽車需要精準停車時不再合適,考慮加入位置誤差的PID控制算法如下:
x.des(t)=-kp(sx-sref)-ki∫t0(sx-sref)dt-kd [(ek-ek-1)] (3)
式中Sx為當前車輛所在位置,Sref為期望到達的位置,ek為當前的位置誤差,ek-1為上周期的位置誤差。將式(3)計算的x.des(t)即速度補償量加入到式(2)中,即Vref =V+x.des(t)以此實現對車輛位置的精確控制。x..des(t)為自動駕駛縱向控制系統的期望加速度。需要減速停車時,自動駕駛系統根據期望位置誤差和期望速度誤差計算出期望的車輛加速度值,用于控制電子剎車踏板打開一定開度,制動缸沖入氣壓推動活塞使剎車片抱緊輪胎產生縱向制動力。控制流程如上圖2表示。理想的情況下,上述過程可實現車輛按照期望的位置和速度減速停車。但是剎車系統的磨損和氣路堵塞,例如氣路有水汽導致比例閥堵塞充壓不足時,同樣的期望加速度產生的制動壓力不一致,使得系統帶來不確定的因素,如上圖1中所描述的現象(從我們在柳汽T7半掛卡車自動駕駛實車停車測試的結果來看,每50次的停車測試,會出現2次車輛無法在期望位置停車)。因此,僅使用PID控制器對自動駕駛車輛期望的速度和位置控制無法滿足制動系統異常情況下的減速停車要求。咨詢有多年駕駛經驗的重卡司機,人工駕駛時同樣會出現腳踩同樣深度制動踏板出現剎車制動力不足情況,當然司機在這種情況下會自覺地的加大腳踩剎車的力度使得剎車制動滿足停車要求。通過大量自動駕駛實驗數據分析,當氣制動產生的制動效果不足時,體現在氣制動缸壓力與實際期望產生的制動壓力存在誤差。因此,本文考慮在原有的PID控制器基礎上,針對期望的制動力和實際產生的制動力引入一種自適應控制算法,補償制動壓力不足的問題,實現期望制動力與實際制動力匹配。
3 模型參考自適應控制器設計
本文引入一種模型參考自適應控制算法[7],并通過理論推導和穩定性分析,驗證了自適應控制律的可良好解決氣制動剎車制動力不足的現象。
3.1 模型參考自適應控制基本理論
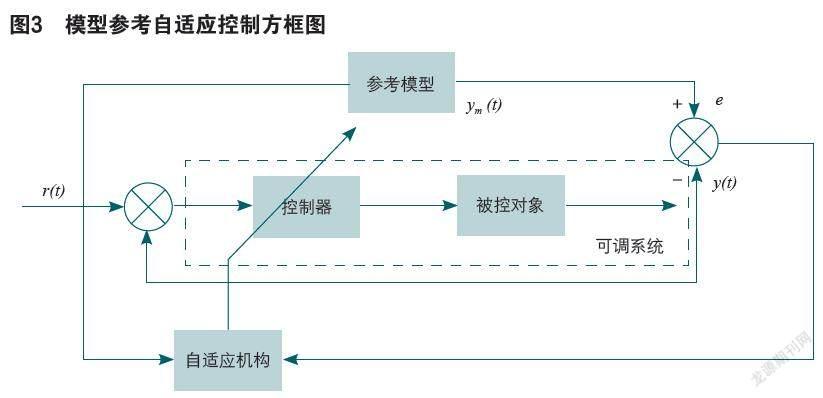
模型參考自適應控制的流程框圖如下圖3所示。
模型參考自適應控制流程圖由兩個環路組成,控制器和被控對象組成內環,描述為可調系統。由參考模型和自適應機構組成外環。對于重型車輛自動駕駛系統來看,該系統是在常規的縱向PID反饋控制回路上附加一個參考模型和自適應機構的自動調節回路組成。
對于重型車輛的縱向控制,當氣制動剎車系統的制動力不足時,設計的自適應機構調整PID控制器的參數,增加控制器的輸出加速度增大剎車力度(即模擬司機駕駛發現制動力不足時加大腳踩剎車踏板),以實現車輛按照期望的位置和速度自動駕駛跟停車。
3.1.1 基于lyapunov穩定性理論設計方法
模型參考自適應控制設計的方法有兩種,一種為參數最優化方法,另一種為基于穩定性理論的方法。本文考慮基于lyapunov穩定性理論[7]方法設計重型車輛縱向控制的自適應控制律。
上文描述了重型車輛縱向控制器為PID控制器,其傳遞函數如下式(4)所示,為一階系統。
(4)G(s)= kp + ki/s + kd s
本文定義一階系統的狀態方程如下:
(5)y. + ap y = bp u
設計參考模型如下:
(6)y. + am ym = bm r
r為參考模型輸入,ym為參考模型輸出, u為被控對象實際輸入,y為被控對象實際輸出。MRAC的目標:e=y-ym,當t→∞時, e→0,即參考模型接近于實際模型。
對式(5)兩邊加上amy:
(7)
式(7)減去式(6):
(8)
(9)
令:,
則式(9):
(10)
根據MRAC的目標 :,當 t→∞時,,可知式(10)當t→∞時,滿足條件
u-c0(t)y-d0(t)r=0
即:
u=c0(t)y-d0(t)r (11)
式(11)為設計的自適應控制律,使得當t→∞時,y漸近跟蹤ym。
因y和r已知,所以需設計可調整的參數 c0(t)和d0(t)滿足式(11)的要求。
利用lyapunov穩定性理論,決定c0(t)和d0(t)的自適應律參數,使得式(11)的輸出滿足當 t→∞ 時,的要求。對誤差e 構建lyapunov的能量函數:
(12)
對式(12)兩邊求導:
(13)
需對式(10)進行簡化,得到式(14):
(14)
式(10)的簡化過程如下:
將式(11)代入式(5),
(15)
而,對兩邊求導
(16)
而? 代入式(16),得:
令:
,
則推導出式(14):
。
繼續式(13)lyapunov能量函數的推導,代入式(14)得:
(17)
假定:
(18)
帶入公式(17)得:
。
根據上式可知,對于任意e≠0,V是半負定的,即能量函數V是穩定的。根據lyapunov穩定性理論:若存在一個有連續一階偏導數的正定函數V(x,t),V(x,t)滿足下述條件:V·(x,t)為非正定(半負定)的,則該系統在原點處的平衡態是一致穩定的。因此,按式(18)c0(t)確定和d0(t),可保證式(14) 的穩定。
以上就是整個模型參考自適應控制基于lyapunov穩定性理論的推導過程,推導出的式(18)為自適應機構的自適應律。
4 實車測試數據分析
為驗證模型參考自適應控制可以解決氣制動剎車因自身問題導致制動力不足,本文作者在長沙智能網聯汽車測試區使用柳汽T7帶掛重卡空載工況下進行自動駕駛實車測試。為驗證模型參考自適應控制算法的有效性,設計測試用例如下:
(1)選擇測試路段為測試區的高速路段,路段長度1.5km。
(2)設計自動駕駛巡航速度為20km/h,固定每次測試自動駕駛終點及車輛停車點,以及自動駕駛起點。
(3)自動駕駛過程為加速、巡航、減速、停車。
通過調整氣制動氣壓調節閥頂部的調整螺釘調小貯氣缸氣壓,模擬剎車性能變差情況。
自動駕駛測試項分三項:第一項,正常貯氣缸氣壓下采用PID控制算法,采集車輛停車時的速度和加速度變化情況;第二項,采用PID控制算法同時加入模型參考自適應控制算法,調小貯氣缸氣壓下停車時的速度和加速度變化情況;第三項,未加入模型參考自適應控制算法僅采用PID控制算法,調小貯氣缸氣壓下停車時的速度和加速度變化情況。對比三次試驗的制動減速停車時速度變化曲線如上圖4所示,加速度變化曲線如上圖5所示,制動缸壓力變化曲線如上圖6所示。
從圖4的速度數據曲線來分析,車輛速度從8.33m/s減速到0停車,第一項正常貯氣缸氣壓下和第二項加入模型參考自適應控制算法但調小了貯氣缸氣壓下的減速時間需要大約9s,第三項未加入模型參考自適應控制但調小了貯氣缸氣壓下的減速時間需要大約12.5s。
從圖5的加速度數據曲線來分析,車輛速度從8.33m/s減速到0停車,第一項正常貯氣缸氣壓下和第二項加入模型參考自適應控制算法但調小了貯氣缸氣壓下的加速度穩定在-0.85左右,第三項未加入模型參考自適應控制但調小了貯氣缸氣壓下的加速度穩定在-0.6左右。
從圖6的制動缸壓力數據曲線來分析,車輛速度從8.33m/s減速到0停車,第一項正常貯氣缸氣壓下和第二項加入模型參考自適應控制算法但調小了貯氣缸氣壓下的制動缸壓力穩定在350KPa左右,第三項未加入模型參考自適應控制但調小了貯氣缸氣壓下的加速度穩定在255KPa左右。
從上述數據分析可以看出,加入模型參考自適應控制算法調整控制器輸出,當制動缸的制動壓力不足時,會自動增加控制器輸出量,加大電子剎車踏板行程,提升剎車力度到控制系統的期望值。
5 結語
本文提出一種基于期望制動力和實際制動力的模型匹配自適應控制。設計過程包括問題提出、縱向動力學模型分析、模型參考自適應設計、穩定性推導、測試用例設計和實車測試驗證。從這個設計過程和實車測試的數據分析來看,基于模型參考自適應控制理論推導的自適應機構可以通過調整控制器的輸出良好實現期望值與實際輸出值的匹配,良好模擬司機在制動減速時發現車輛制動力不足通過加大剎車踏板行程增大剎車力度的過程。上述控制算法可良好應用到重型車輛自動駕駛的縱向氣制動控制模型中,測試用例的實驗數據和后續的柳汽T7大量的自動駕駛實車測試也進一步說明控制器設計的有效性和魯棒性。
參考文獻:
[1]Rajesh Rajamani,Choi,S.B.,Law,B.K.,Hedrick,J.K.,Prohaska,R.,and Kretz,P.,2000.Design and experimental implementation of longitudinal control for a platoon of automated vehicles[J].Transactions of ASME,Journal of Dynamic Systems, Measurement,and Control,122(September),pp.470–476.
[2] Liang,C.,and Peng,H.,1999.Optimal adaptive cruise control with guaranteed string stability[J]. Vehicle System Dynamics,32(4),pp. 313–330.
[3]Hatipoglu,C.,Hai,Y.,and Ozguner,U.,2001.Self-optimizing brake control design for commercial vehicles[J].In SAE Technical Paper,no.2001-01-2731.
[4]Swaroop,D.,and Hedrick,J.K.,1996.“String stability of interconnected systems”.IEEE Transactions on Automatic Control,41(3),pp.349–357.
[5] Choi,S.B.,and Devlin,P.,1995. Throttle and brake combined control for intelligent vehicle highway systems[J]. In SAE Technical Paper,no.951897.
[6] Rajesh Rajamani主編,王國業,江發潮,張露譯.車輛動力學及控制第2版[M].機械工業出版社,2018(4):65-85.
[7]Nhan T. Nguyen,2018.Model-Reference Adaptive Control.Intelligent Systems NASA Ames Research Center Moffett Field,CA USA.pp.47-81,83-123.