超彈性SMA唯象本構模型及其在震動控制中的應用
2022-04-20 10:41:30劉博
鐵道建筑技術 2022年2期
關鍵詞:模型
劉 博
(中鐵二十局集團有限公司 陜西西安 710016)
1 引言
結構振動控制技術能夠有效抑制結構在地震作用、風振作用和爆破作用等外部激勵下的響應和損傷積累,提高結構的抗災變性能,是一種積極有效的工程結構防振(震)減災措施[1-2]。形狀記憶合金(Shape Memory Alloy,SMA)作為性能優良的智能感知、驅動功能材料,具有可恢復應變大、與其他基體耦合難度低以及耐腐蝕性能好等優點。工程領域的諸多專家和學者試圖利用SMA的超彈性特性減輕振(震)動帶給結構的危害。胡淑軍等[3]基于超彈性SMA的自復位性能設計了一種抗震性能良好的SMA支撐,并通過SMA支撐的擬靜力試驗驗證了其自復位能力及耗能能力。閻石等[4]提出了一種新型變形可恢復SMA減震裝置,解決了SMA線材的錨固問題,并建立了該新型SMA減震裝置的恢復力模型。
為充分發揮SMA基減震裝置的減振(震)特性,需建立一個表述簡單、相關參量容易獲取,且適于實際工程應用的SMA力學模型。經典的SMA力學模型主要分為兩類:細觀力學本構模型和宏觀唯象本構模型[5]。細觀力學本構模型表述過于復雜,相關參量不容易測量和確定,距離實際工程應用相差甚遠;宏觀唯象本構模型基于試驗結果來描述SMA的力學響應特性,從工程應用角度來說,更為實用[6]。作為宏觀唯象本構模型的典型代表,Graesser-Cozzarelli(G-C)模型因不涉及SMA復雜的微觀結構,且定義了適用于實際工程計算使用的宏觀參數體系,而在結構振動控制領域得到廣泛應用[7]。但G-C模型由于沒有相變約束條件,所以無法描述應力誘發馬氏體相變結束后馬氏體相SMA的硬化特性。
鑒于此,本文首先對G-C模型進行數值仿真,分析各參數變化對超彈性SMA滯回曲線的影響,明確G-C模型存在的不足,指出G-C模型改進方向。然后,通過在G-C模型中引入馬氏體硬化項,描述超彈性SMA在大應變幅值工況下的應力-應變關系,并對超彈性SMA滯回曲線進行數值模擬,驗證模型的有效性。最后,借鑒機械領域的齒條齒輪加速器,設計一種具有自復位功能的位移放大型SMA減震裝置,并以一個自復位SMA減震裝置控制的框架結構為例,探討本文建立的超彈性SMA唯象本構模型在工程結構被動減震控制領域的應用價值。
2 G-C宏觀唯象本構模型
2.1 G-C模型概述
Graesser和Cozzarelli等在經典Bouc-Wen模型[8]的基礎上,建立了一種相對簡單并且比較實用的本構模型,其增率形式的表達式為:

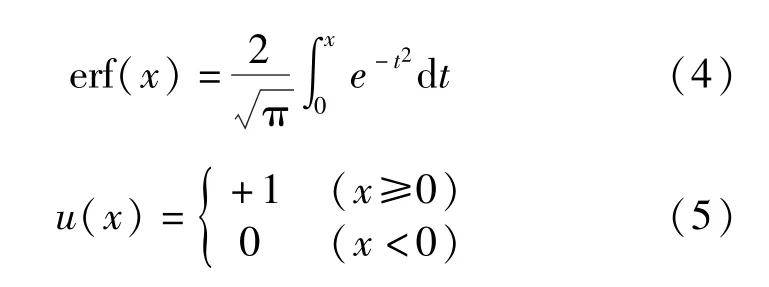
式中:σ為應力;ε為應變;Ea為變形模量;Eam為非彈性變形模量;β為背應力;σms為屈服應力閾值;c、a、n為控制SMA滯回曲線形狀的材料參數;ha為控制SMA滯回曲線在非彈性范圍內斜率的常數;fT為描述不同溫度下SMA狀態的參量,當fT=0時,G-C模型退化為經典的Bouc-Wen模型;erf(x)和u(x)分別為誤差函數和單位階躍函數,誤差函數erf(x)可保證卸載后逆相變完成時殘余應變為零,其表達式為:
2.2 超彈性SMA遲滯曲線仿真
依據G-C模型,通過Matlab中Simulink模塊對超彈性SMA遲滯曲線進行數學仿真。圖1為0.1 Hz頻率、2%應變振幅加載條件下,各參數對超彈性SMA遲滯曲線的影響,相關仿真參數見表1。由圖1a可知,超彈性SMA遲滯曲線的尺寸及卸載段平臺高度對參數fT較為敏感,隨著fT的增大,遲滯曲線卸載段平臺不斷增高,而遲滯曲線尺寸不斷減小;由圖1b可知,參數a對SMA遲滯曲線形狀有較大影響,參數a越小,超彈性SMA遲滯曲線越飽滿,形狀越接近“梭形”;由圖1c可知,當參數c小于0.01時,遲滯曲線的形狀對該參數不敏感。
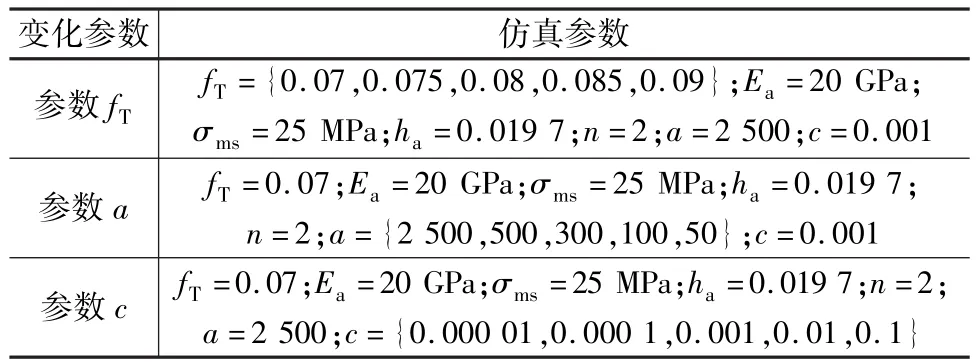
表1 超彈性SMA遲滯曲線的仿真參數值

圖1 G-C模型中各參數對超彈性SMA遲滯曲線的影響
2.3 G-C模型的不足
通過上述G-C模型的參數分析,可以明確G-C模型存在3點不足:(1)模型沒有相變約束條件,無法描述應力誘發馬氏體相變結束后馬氏體相SMA的硬化特性;(2)erf(x)中被積函數沒有原函數,不能使用牛頓—萊布尼茲公式求解,只能做近似計算;(3)式(1)中(σ-β)計算結果可能為負值,當n為實數而非整數值時,計算可能無意義。上述G-C模型的不足為下文模型的改進指明了方向。
3 SMA馬氏體硬化特性及改進G-C唯象本構模型
3.1 SMA馬氏體硬化特性描述
G-C模型由于沒有相變約束條件,所以無法描述應力誘發馬氏體相變結束后馬氏體相SMA的硬化特性。 Wilde等[9]、Zhang等[10-11]和張振華等[12]通過在G-C模型中加入馬氏體硬化項,描述了超彈性SMA在大應變幅值工況下的應力-應變關系。本節對上述學者描述SMA馬氏體硬化特性的方法進行回顧,并進一步指出相關方法的不足,為下文改進G-C唯象本構模型的建立奠定基礎。
Wilde等對G-C模型進行了拓展,考慮了大應變幅值工況下SMA的馬氏體硬化特性,模型具體表達式為:

式中,函數uⅠ(ε)、uⅡ(ε)和uⅢ(ε)的表達式分別為:

Wilde等將超彈性SMA的恢復力響應通過式(8)~式(10)劃分為三部分。當應變超出馬氏體相變結束時所對應的應變值εmf后,超彈性SMA恢復力曲線轉化為以Es為馬氏體硬化段的變形模量。uⅡ(ε)函數的引入使SMA恢復力曲線在向馬氏體硬化段轉換時更加平滑。雖然Wilde等建立的模型可描述大應變幅值工況下SMA的馬氏體硬化特性,但遺憾的是,模型中引入過多不具有物理意義的參數,例如α1、α2和α3,這些參數的合理取值范圍不容易被確定。此外,(σ-β)可能為負值,當n為實數而非整數值時,計算可能無意義。
Zhang等在Wilde等建立模型基礎上,對應力增率和背應力的表達式進行了修正,修正表達式為:

式中,函數uⅠ(ε)、uⅡ(ε)、uⅢ(ε)、K(ε)和g(t)的表達式分別為:

相比于Wilde等建立的模型,Zhang等建立的模型更為穩定,運算速度更快,但超彈性SMA恢復力響應仍然被劃分為多個部分,開關標志較多,模型較為復雜。張振華等建立的模型與上述Wilde等以及Zhang等建立的模型類似,同樣是通過多個開關部分來描述SMA的馬氏體硬化特性,此處不予贅述。需注意,式(6)~式(17)中未解釋含義的參數可參見G-C模型。
3.2 改進G-C唯象本構模型的建立
參考上述G-C系列模型,建立一種形式簡單且能夠描述SMA在大應變幅值下馬氏體硬化特性的唯象本構模型,具體表達式為:


式中:Es為馬氏體硬化段的變形模量;εmf為馬氏體相變結束對應應變值;其余參數含義與G-C模型相同。
由式(18)~式(20)的表達式可知,本文提出的改進G-C唯象本構模型的應力率和背應力計算公式延續了原始G-C模型的表達形式,并克服了n只能取實數而非整數的限制。為了描述SMA在大應變幅值下的馬氏體硬化特性,改進G-C唯象本構模型在應力率計算公式中添加了S(ε)函數,其具體表達式見式(20)。相比于3.1節介紹的模型,本文建立的改進G-C唯象本構模型形式更為簡單,各參數物理意義也更為明確。
采用改進G-C唯象本構模型對發生馬氏體硬化特性的超彈性SMA單向拉伸應力-應變曲線進行數值仿真,使用的材料參數見表2。圖2為0.1 Hz頻率、7%應變振幅加載條件下的仿真結果。由圖2可知,改進G-C唯象本構模型可以描述超彈性SMA在大應變幅值工況條件下的馬氏體硬化特性。

圖2 超彈性SMA單向拉伸應力-應變曲線

表2 材料參數
4 改進G-C唯象本構模型的應用
4.1 位移放大型SMA減震裝置
本小節借鑒機械領域的齒條齒輪加速器,設計一種具有自復位功能的位移放大型SMA減震裝置,構造如圖3所示,并以該減震裝置控制的單層單跨框架結構為例,對改進G-C唯象本構模型在結構被動減震控制應用中的可行性進行研究和討論。該減震裝置主要包括:閉式防護殼、滑動導桿、連接桿、SMA絲、導向輪、滑塊、傳動齒輪、六角法蘭帶齒螺栓。閉式防護殼左右側壁各有兩個六角法蘭帶齒螺栓;SMA絲固定于六角法蘭帶齒螺栓和滑塊之間;滑動導桿和連接桿與受控結構相連,當受控結構發生變形時,將帶動滑動導桿往復運動,滑動導桿產生位移通過傳動齒輪傳遞給滑塊,進而帶動SMA絲發生變形。為提高SMA耗能性能,本文設計安裝于滑動導桿與滑塊間的位移放大裝置。小齒輪直徑r,大齒輪直徑R,滑動導桿利用小齒輪帶動復合齒輪轉動,大齒輪帶動滑塊發生放大R/r倍的位移。定義R/r為放大系數α,相對滑動導桿、滑塊的位移將被放大α倍。
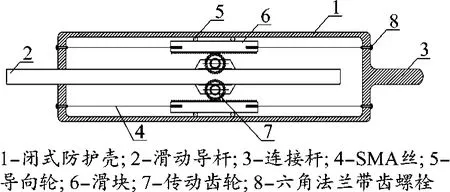
圖3 具有位移放大功能的自復位SMA減震裝置
該位移放大型SMA減震裝置的恢復力FSMA-D可表示為:

式中:σ為SMA產生的恢復應力,通過改進G-C唯象本構模型計算,材料參數見表2。需注意,在計算該位移放大型SMA減震裝置產生的恢復力時,位移通過齒輪系統放大了α倍;ASMA為SMA的橫截面面積。在下文的控制算例分析中,將ASMA設置為12.56 mm2,SMA初始長度設置為400 mm,位移放大倍數α設置為2。
4.2 被動減震控制算例分析
圖4為位移放大型SMA減震裝置控制結構的計算簡圖。該結構為單層單跨剪切型框架,結構的跨度為1 200 mm,層高為800 mm,質量為200 kg,層間剛度為83 480 N/m,阻尼比為5%。設結構的質量集中在樓板處,且平面內無限剛度的樓板與無限剛度的“人字型”支撐通過位移放大型SMA減震裝置串聯。輸入的地震波為EL-Centro波,其加速度峰值為0.40 g。數值積分時的時間步長取為0.02 s。
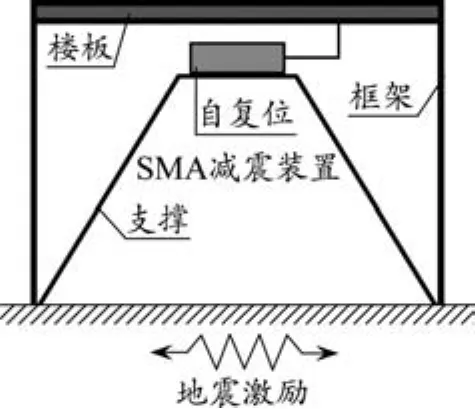
圖4 位移放大型SMA減震裝置控制結構計算簡圖
圖5a為減震結構在受控與無控狀態下的位移響應,可以看出,布置位移放大型SMA減震裝置后,結構的層間位移得到了有效控制。受控結構的最大層間位移由32 mm降低為11 mm,減震率高達65.62%。圖5b為位移放大型SMA減震裝置輸出的恢復力曲線,減震裝置的輸出力呈現出飽滿的滯回曲線,而且在地震結束后可以恢復到原狀,不產生殘余變形。綜上可知,改進G-C唯象本構模型具有一定的工程應用價值,該模型可為SMA基減震裝置力學性能的數值仿真及其在被動減震控制中的應用提供理論支持。

圖5 結構被動減震控制分析結果
5 結論
本文在G-C模型參數分析的基礎上,建立一種能夠描述超彈性SMA在大應變幅值工況下應力-應變關系的唯象本構模型,并將其應用于結構被動減震控制中。得到的結論如下:
(1)改進G-C唯象本構模型可以描述超彈性SMA在大應變幅值工況條件下的馬氏體硬化特性。
(2)位移放大型SMA減震裝置的輸出力呈現出飽滿的滯回曲線,而且在地震結束后可以恢復到原狀,不產生殘余變形。
(3)改進G-C唯象本構模型形式簡單、概念明確、參數容易得到,具有一定的工程應用價值,可為SMA基減震裝置力學性能數值仿真及其在被動減震控制中的應用提供理論基礎。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19