直升機尾槳失效事故案例分析
2022-04-21 04:35:54王暢,程蒙,馬帥
重慶交通大學學報(自然科學版) 2022年4期
王 暢,程 蒙,馬 帥
(1. 清華大學 航天航空學院,北京 100084; 2. 中國空氣動力研究與發展中心 低速空氣動力研究所,四川 綿陽 621000;3. 西南科技大學 土木工程與建筑學院,四川 綿陽 621010)
0 引 言
尾槳是單旋翼構型直升機平衡主旋翼反扭矩、為全機提供偏航穩定性及實現航向操縱的重要部件,尾槳功能受損會嚴重威脅直升機的飛行安全。尾槳功能受損不僅包括機械性故障導致,還可能由空氣動力學因素導致尾槳失效(loss of tail-rotor effectiveness, LTE)[1]。直升機在側風環境中低速飛行、偏航角速度過大以及大速度側滑轉彎飛行時,尾槳的氣動拉力性能易發生損失或突變,導致飛行員操縱直升機難度增大,甚至造成墜機事故。美國國家運輸安全委員會(national transportation safety board, NTSB)將尾槳失效認定為威脅民用直升機飛行安全的重要影響因素。據FAA統計,1988年至1993年期間美國發生的民用直升機墜機事件中有16%與尾槳相關,而由尾槳失效導致的事故占到其中的23%[2]。隨著我國通航直升機產業的發展,直升機已成為了重要的應急救災救援工具和手段,有必要增強對直升機尾槳失效問題的認識和重視。
在直升機的早期研制史上,BO-105、AH-1G、AH-56A和Lynx等機型在試飛和使用過程中出現了航向控制問題[3-5]。例如,AH-1G直升機在左側風環境下重載飛行時無法保持航向平衡,所能承受的右側風風速僅為12節;AH-56A直升機的左側滑飛行速度限制在15節。在后續的研發過程中,通過將尾槳轉向改為底朝前、調整尾槳安裝位置改善了這些型號的航向穩定和控制問題。為研究導致直升機航向控制問題的因素,W. WIESNER等[6]開展了旋翼/尾槳組合狀態的風洞試驗,研究了不同尾槳布局在側風環境下尾槳氣動性能隨風速的變化規律,研究表明:旋翼尾流干擾、尾槳渦環狀態、尾槳順風狀態對尾槳拉力的降低或突變起主導作用。基于以上風洞的試驗數據,W. WIESNER等[7]總結了單旋翼構型直升機的尾槳氣動布局設計指導原則。
研究指出,單旋翼構型直升機都存在一定的發生尾槳失效的風險,尾槳失效主要由3種原因構成:尾槳渦環狀態、旋翼槳盤渦尾流對尾槳干擾、機身和垂尾的風標效應。
現階段對尾槳失效的研究多以特定狀態下尾槳的氣動性能機理分析或提升直升機氣動布局設計為主,對事故過程因素及防范措施的研究和總結卻鮮有報道。而尾槳失效事故是一個復雜的動態過程,且與氣象條件、飛行環境、飛行任務、直升機性能和飛行員操作等多種因素相關,需要在實際操作層面上對事故因素和防范處置策略進行總結分析。因次,闡述了尾槳失效的空氣動力學原理,通過幾例典型的直升機尾槳失效飛行事故,基于事故案例分析了導致尾槳失效事故的環境因素和操縱因素,總結了事故的經驗教訓,提出了尾槳失效事故的防范和險情處置建議。
1 尾槳失效的定義與空氣動力學原理
尾槳失效是指由于空氣動力學原因而非尾槳機械故障造成的直升機非指令性的偏轉。不同機型的主旋翼轉向存在左旋和右旋的區別,主旋翼所產生的反扭距方向也有所差異,主旋翼右旋直升機發生尾槳失效表現為意外右偏,主旋翼左旋直升機發生尾槳失效表現為意外左偏。筆者以右旋直升機為例,闡述FAA中給出了3種易導致直升機尾槳失效的相對風環境[8]以及相關的空氣動力學研究現狀。
1.1 風標效應
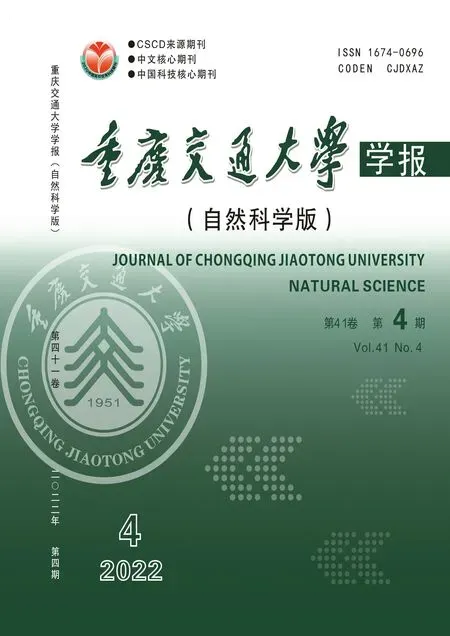
當直升機處在120°~240°方位的順風環境時(圖1),來流在機身和垂尾上作用氣動力所產生的偏轉力矩將使得直升機機頭指向來流方向。除非飛行員意識到風標效應的發生并及時用腳舵修正偏差,否則直升機會非指令地偏轉。
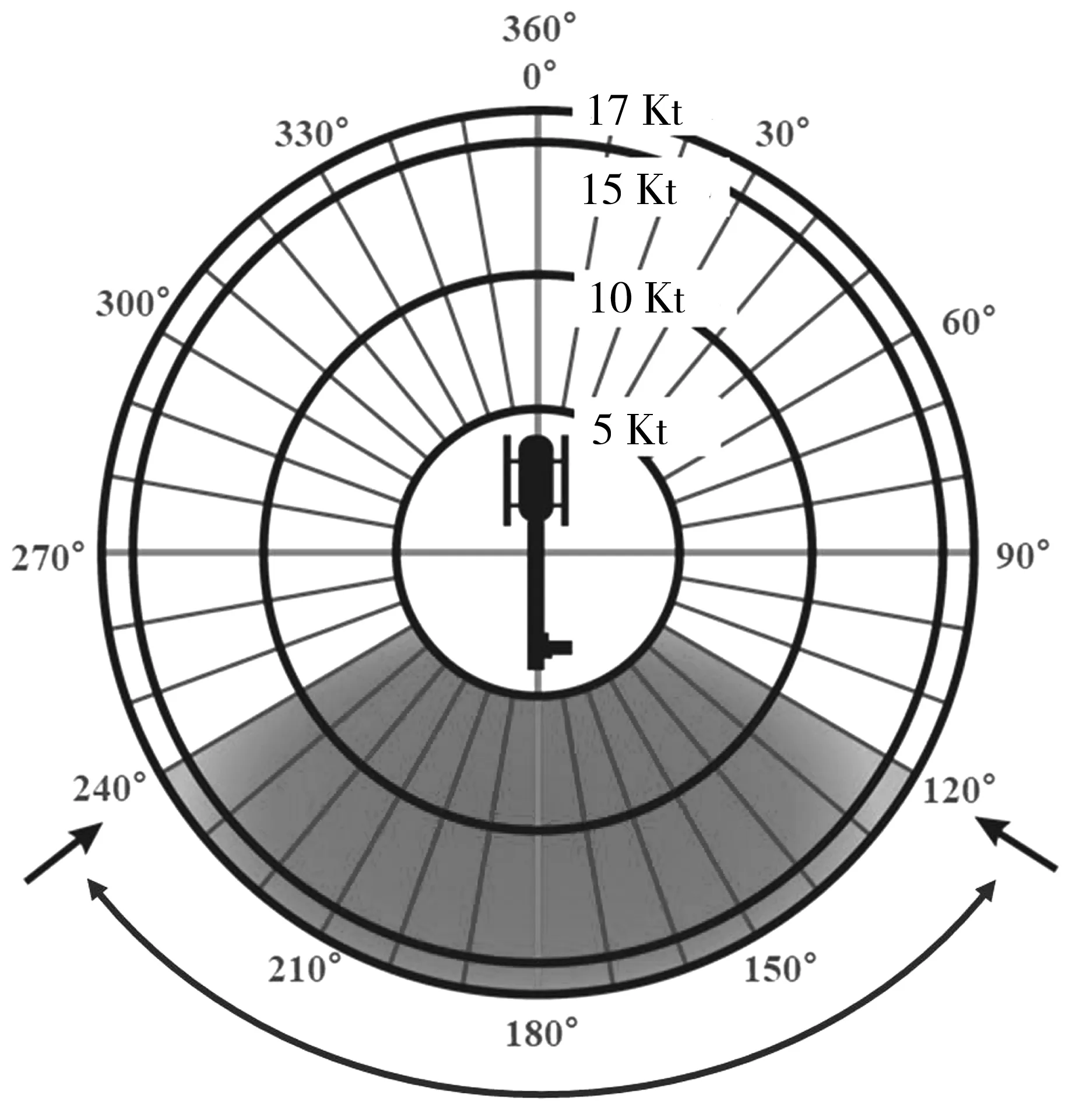
圖1 風標效應產生的相對風區域Fig. 1 Relative wind area caused by wind vane effect
1.2 尾槳渦環狀態
當尾槳受與誘導速度相反的相對來流時,尾槳氣流環境與主旋翼將下降飛行類似,可能進入渦環狀態[9-10]。圖2為尾槳渦環狀態相對風區域。圖3為AH-56A直升機左側滑飛行時的腳舵操縱范圍[11],由于渦環流動結構呈現高度非定常的特征,尾槳拉力將產生振蕩,飛行員需要進行快速而持續的蹬腳舵修正,以補償尾槳拉力的快速變化。

圖3 AH-64左側滑飛行時的腳蹬操縱量Fig. 3 Pedal control amount of AH-64 left side sliding flight
此外,尾槳渦環狀態還將導致尾槳拉力損失。圖4為風洞試驗[12]給出的OH-58直升機在45節速度各個風向下產生的尾槳拉力,在尾槳進入渦環狀態后需要更多的腳蹬操縱量來平衡直升機。
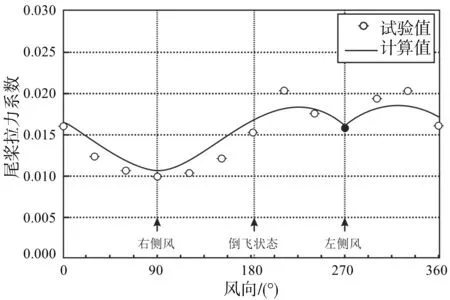
圖4 OH-58直升機尾槳拉力隨風向的變化Fig. 4 Variation of tail rotor tension of OH-58 helicopter changingwith wind direction
除相對風環境外,尾槳在渦環狀態下的氣動性能特性受直升機尾槳氣動布局影響較為顯著。如,AH-56A直升機將尾槳轉向調整至底朝前,左側滑飛行時的腳蹬操縱負荷顯著低于底朝后轉向尾槳的原型機(圖5)。
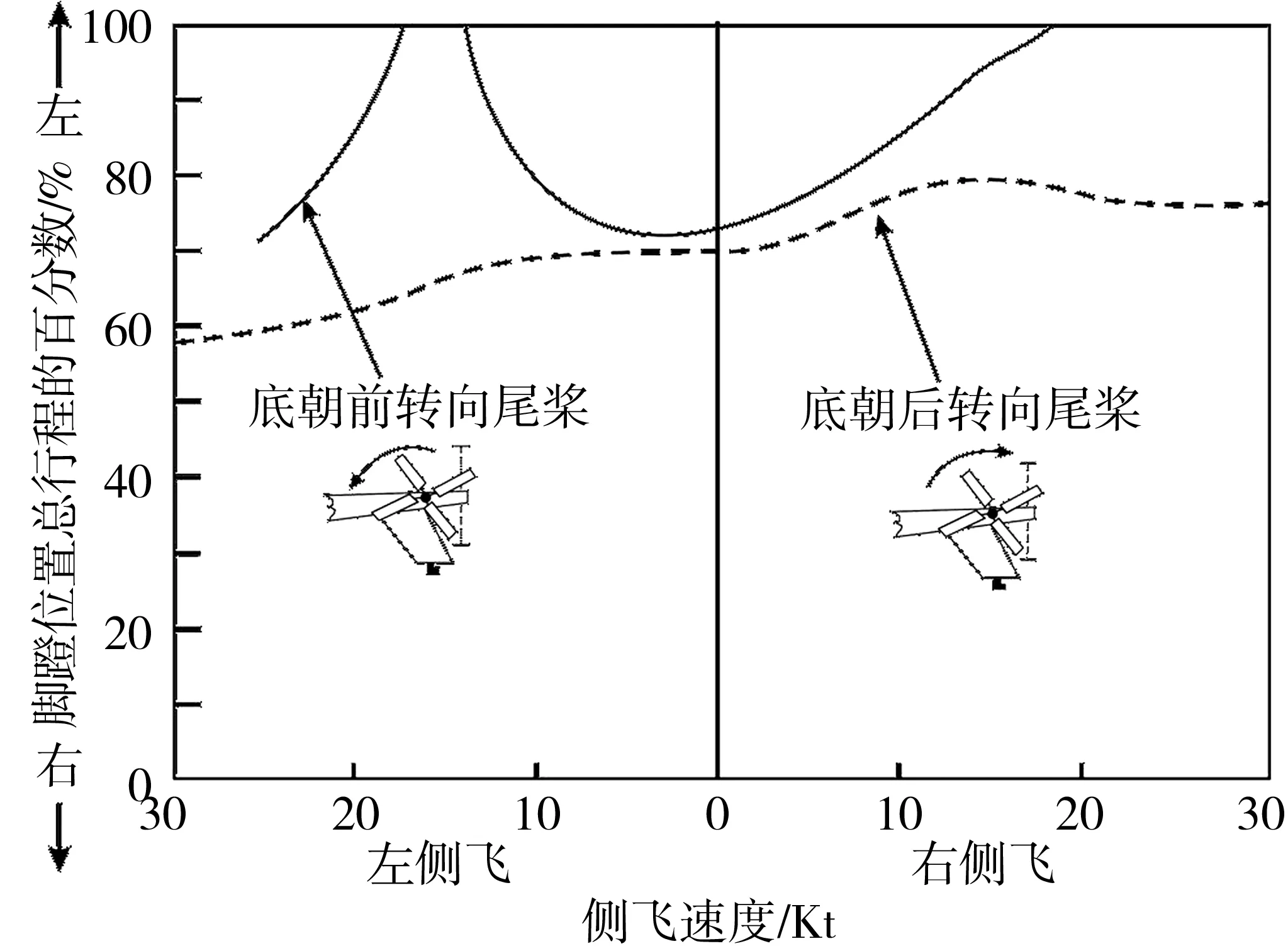
圖5 AH-56A直升機尾槳轉向修改前、后腳舵操縱對比Fig. 5 Comparison of rudder control before and after tail rotorsteering modification of AH-56A helicopter
1.3 主旋翼槳盤渦與尾槳干擾
直升機在10~30節空速下飛行時,主旋翼的槳盤邊緣將產生類似于固定翼翼尖渦結構的槳盤渦(圖6)。來自左前方的相對風會導致尾槳浸潤在主旋翼槳盤渦中(圖7)。主旋翼槳盤渦的干擾將造成尾槳拉力的突變,底朝前轉向尾槳處于主旋翼槳盤渦中將使得尾槳前緣動壓增強,導致其拉力增加,而底朝后尾槳的拉力將降低。在該相對風環境中轉向飛行時,伴隨著尾槳與主旋翼槳盤渦的相對位置變化,槳盤渦與尾槳的干擾效應會突然出現或消失,從而導致尾槳拉力的突變。因此,在該相對風環境下運行時,要意識到尾槳拉力將可能產生的突變,并提前預備相對應的腳蹬操縱。

圖6 主旋翼槳盤渦Fig. 6 Main rotor disc vortex
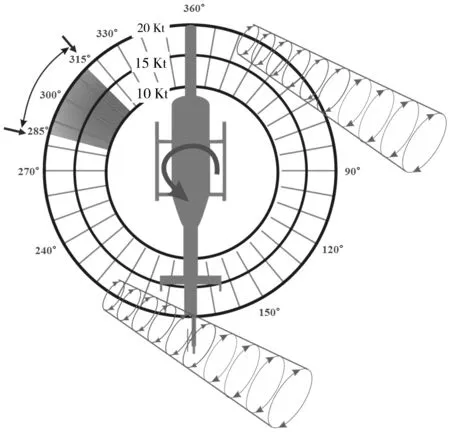
圖7 旋翼槳盤渦與尾槳干擾產生的相對風區域Fig. 7 The relative wind region caused by the interference betweenrotor disk vortex and tail rotor
歐直聯合阿古斯塔與韋斯特蘭以及法國宇航院、德國宇航院等團隊聯合開展了“Quartering Flight”研究項目[13],在英國的24英尺風洞開展了側風環境下右旋旋翼與尾槳組合的風洞試驗,對比了60°右側風來流下底朝前與底朝后轉向尾槳在低位、高位組合布局下的氣動性能特性。研究表明:在較低前進比時(低于0.05)尾槳轉向不同的而導致的拉力差異性較小;隨著前進比的增加,底朝前轉向尾槳產生的拉力顯著高于底朝后尾槳;在尾槳位置與主旋翼槳盤平齊時,相反轉向尾槳之間的性能差異最為顯著。T. M. FLETCHER等[14]基于渦量輸運模型對“Quartering Flight”試驗項目中的旋翼與尾槳組合構型進行60°右側風狀態的數值模擬,對比了不同轉向的高、低位尾槳氣動力隨風速的變化特征以及旋翼與尾槳尾跡結構的演化規律,表明了底朝前轉向尾槳在旋翼尾槳干擾情況下能獲得前緣動壓的增加。
2 尾槳失效事故案例分析
2.1 案例1
事故過程:2009年5月1日上午,香港航空俱樂部有限公司(HKAC)的一架羅賓遜R22直升機在目視飛行條件下開展私人飛行任務。完成飛行活動后,準備降至位于九龍啟德的HKAC停機坪。飛行員選擇了1條往西的開闊路線開始進近,進近過程中直升機在航向上難以穩定,飛行員放棄降落并執行了復飛。在第2次進近過程中,直升機依然出現了航向上難以穩定的現象,當右轉彎準備再次復飛時,機身快速向右意外偏轉,直升機開始旋轉并下墜,與地面上的一輛大巴相撞[15],案例1直升機事故受損情況如圖8。

圖8 案例1直升機事故受損情況Fig. 8 Damage of the helicopter accident in case 1
事故原因分析:根據香港氣象臺提供航空例行天氣報告(meteorological terminal aviation routine weather report,METAR)顯示,事發地的地面風為風速16節的東南風。圖9中黃色實線代表飛行進近路線,黃色虛線代表地面風風向。當飛行員第一次沿著西北方向減速進近時,他感受到了直升機機身右偏,即使操縱左腳舵也無法恢復,飛行員判斷航路上有較強的順風,放棄著陸并復飛。
在首次減速進近的飛行過程中,直升機的飛行地速約為20~30節,加上順風的影響,直升機的前飛空速低于15節。在該速度區間下飛行,R22直升機尾槳運行工況較為惡劣:①由于低于過渡速度,主旋翼槳盤的自由來流分量不足,主旋翼所需的誘導功率較高,導致尾槳需要更大的拉力以平衡主旋翼反扭距[16];②在低于過渡速度的情況下,同等尾槳總距下產生的尾槳拉力較小;③R22直升機尾槳為低位底朝后轉向布局,低速飛行時主旋翼誘導尾流呈柱狀向后傾斜,尾槳前半部分與向下的主旋翼誘導尾流切割,尾槳動壓損失導致尾槳拉力進一步降低。在以上三方面因素的影響下,加上發動機剩余儲備功率不足,飛行員無法通過操縱左腳舵恢復直升機的航向偏轉。
在第2次沿著同樣方向的進近時,飛行員依據HKAC東部角落上的風向袋誤判斷風向為逆風,而此時實際風向約為121°,平均地面風速為17節,最大陣風為21節。第2次減速進近時出現類似現象,當飛行員操縱右腳舵后,在順風條件下操縱右腳舵導致垂尾進入風標效應的影響區內,風標效應加速了直升機的偏轉,直升機旋轉半周后進入了尾槳渦環狀態,引發尾槳拉力進一步損失,這些連鎖反應導致了尾槳失效事故的發生。
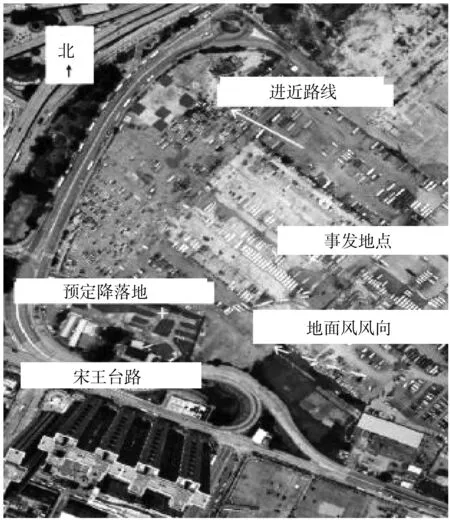
圖9 案例1直升機飛行路線與地面風向Fig. 9 Helicopter flight route and ground wind direction in case 1
2.2 案例2
事故過程:2018年4月9日,一架AS350B3直升機在南非巴爾福地區向東南方向目的地飛行,在接近降落地點時以30節的速度向左盤旋飛行準備降落。在此過程中,飛行員操作腳蹬意圖執行懸停回轉動作,直升機開始意外向左偏轉,并以逆時針方向旋轉。飛行員即使將右腳舵操縱到極限也無法改出旋轉,直升機的旋轉速度一直在增加,直升機主旋翼槳葉與鐵道接觸網線桿相撞擊,發生了墜機事故[17]。
事故原因分析:根據航空例行天氣報告顯示,距離事發地33海里東南方的氣象站觀測到事故發生前15分鐘地面風的風速為12~14節、風向由北方至東北方向,而根據流行氣象的調查和飛行員判斷,事發時該地風速為20~25節。事后,歐直在南非的飛行訓練部門在模擬器上對該飛行任務剖面進行了仿真研究,模擬了不同風速下的懸停回轉操作,多次模擬結果都表明在特定風向下懸停回轉出現了尾槳失效,導致了直升機失去航向控制。事故調查委員會認為:在有側風環境下一般不允許執行懸停回轉操作,其通常應用于特技飛行。側風狀態下的懸停回轉導致了尾槳失效,從而引發直升機失控;此外,該飛行員之前97%的飛行時間是執飛主旋翼右旋直升機,由于剛換飛AS350B3機型,對AS350B3這類主旋翼左旋機型的操作處置不熟悉,案例2直升機事故受損情況如圖10。

圖10 案例2直升機事故受損情況Fig. 10 Damage of the helicopter accident in case 2
2.3 案例3
事故過程:2014年10月4日,美國德克薩斯州一架Bell 206L1+醫療救護直升機在夜間執行病員轉送飛行任務,以12~14節的速度從西北開始進近,準備降落在醫院大樓頂部的直升機停機坪。進近過程中,飛行員認為飛行高度太高且速度太快,決定中止進近并執行復飛。當飛行員拉起總距準備提升高度時,直升機機身開始快速地向右旋轉。飛行員意圖通過施加周期變距并蹬左腳舵使直升機改出偏轉,但直升機一直旋轉5周后撞上電線并發生墜毀[18]。
事故原因分析:在低于過渡飛行速度情況下,旋翼的需用功率較大,此時尾槳需要產生接近于100%的拉力平衡直升機。由于飛行員未估計到直升機低速飛行的功率需求,錯誤的執行了提總距復飛動作,而發動機剩余功率不足,尾槳產生拉力不足以平衡旋翼反扭距,導致尾槳失效事故的發生。
2.4 案例4
事故過程:2013年2月14日,美國德克薩斯州一架OH-58A直升機在山區執行野生鹿群觀察飛行任務,地速為30~35節,地面風為風速5~10節的左側風。隨著地勢的增加,飛行員提總距準備飛越山脊。當直升機距離山脊頂部100 英尺時,直升機出現意外右偏并不停旋轉,飛行員進一步增加總距意圖越過山脊,但該動作加劇了直升機的旋轉。直升機越過山脊后翻滾墜毀[19]。
事故原因分析:在空氣稀薄的高海拔地區,發動機的輸出功率降低,并且主旋翼、尾槳的氣動效率減小。在低速爬升過程中,旋翼需用功率增大,平衡主旋翼反扭距所需的尾槳拉力也進一步增加,左側風的影響誘發了尾槳進入渦環狀態,導致尾槳失效的發生,而后飛行員采取增加總距的措施又進一步加劇了直升機的偏轉。
2.5 案例5
事故過程:2011年10月4日,一架Bell 206B直升機遵照聯邦飛行條例第91部第14條在紐約執行觀光飛行任務。在河邊的停機坪懸停起飛后,當直升機爬升至60英尺高度時,發動機出現功率報警提示,飛行員判斷發動機出現故障,轉而執行降落操作。在接近停機坪時飛行員提總距意圖減速,但此時直升機機頭右偏并開始猛烈旋轉,直升機翻滾墜入河中[20]。
事故原因分析:據NTSB調查,該趟飛行任務預定的成員人數為2人,但實際成員人數為4人,該趟飛行實際起飛總重為3,461.2磅,超出了Bell 206B機型所允許3 200磅的最大起飛總重。由于飛行員在低速且超載飛行的情況下增加總距,導致尾槳拉力不足以平衡旋翼反扭距,引起尾槳失效的發生。
2.6 案例6
事故過程:1997年4月23日,一架Bell 206L-1沿著美國25號州際公路從新墨西哥州法明頓飛往科羅拉多州柯林斯堡。事故發生前,直升機正以約為80節空速通過隘口。在直升機到達穿越隘口的山脊時,飛行員觀察到了前方約一英里處的積云。為躲避積云,飛行員立即開始了爬升和右急轉彎動作。在轉彎期間,直升機空速降到了20~30節,直升機出現了突然的意外右偏轉,之后一直失控旋轉,墜毀在25號州際公路以西約四分之一英里處[21]。
事故原因分析:事發地的盛行風為南風,事故直升機在此風向下處于順風飛行環境。在20~30節風速下,直升機爬升飛行時旋翼需用功率較高,所產生的反扭距較大。飛行員在低于過渡速度,且順風的環境下執行了轉彎動作,由風標效應引發了尾槳失效。此外,事故調查委員會認為:涉事飛行員的山區飛行經驗之前大多基于美國西南部的沙漠干燥地區,而科羅拉多州山脈具有其獨特的的氣候特征,該飛行員缺乏在科羅拉多州山脈地貌和氣象環境下的飛行經驗。
3 結 論
1)根據事故案例總結,尾槳失效多發生于直升機起飛、進近、減速等低速飛行階段。此時,直升機處于小速度、大功率狀態,發動機剩余功率和尾槳操縱余量不足,易受環境風干擾而發生尾槳失效。當直升機需要在側風多發區域飛行時,飛行速度不宜過低,宜采用航向修正法保持航向,且盡量避免在側風環境中進行懸停回轉操作。
2)順風飛行會降低直升機的空速并可能誘發入風標效應,應盡量避免在順風且低空速的情況下執行偏航操作。
3)在需重載或在高海拔、高溫地區飛行時,應提前做好功率核算,確保直升機剩余功率在允許范圍內,且避免激烈地提總距或右偏航操作(主旋翼右旋直升機)。
4)起飛階段未達到最大爬升速度前,不宜采取激烈地提總距操作,避免出現尾槳拉力不足以平衡主旋翼反扭矩的情況發生。
5)飛行員對環境風判斷失誤或未能了解飛行氣象信息是導致尾槳失效事故發生的一個重要因素。因此,需要提前掌握計劃飛行的起降場、點的氣象環境變化趨勢,科學合理地制定飛行計劃,并建立能夠實時獲取航路地面風的技術手段。
6)當發現直升機進入尾槳失效時,采取前推桿使直升機增加前飛速度,以及降低總距、向左蹬腳舵(主旋翼右旋直升機)的操作將有利于直升機改出尾槳失效;而激烈地增加總距將加劇直升機偏轉趨勢;在受限區域或飛行高度較低時,應及時采取自轉下滑措施。