基于KAZE特征的露天礦無人機影像匹配
2022-04-21 07:19:48陳保宇
無線電工程 2022年4期
陳保宇,張 錦
(太原理工大學 礦業工程學院,山西 太原 030024)
0 引言
無人機航空遙感平臺具有機動靈活、快速高效、獲取影像空間分辨率高等優點,廣泛應用于資源調查、城市建模、地形監測和應急救援等多個領域[1]。影像匹配是在2幅或多幅具有重疊區域的影像之間獲取同名點的過程,是無人機影像數據處理的重要環節,現階段影像匹配的方法主要包括基于灰度的影像匹配方法和基于特征的影像匹配方法[2]。
基于點特征的影像匹配方法廣泛應用于遙感影像和無人機影像的匹配,常用的基于點特征影像匹配算法如SIFT[3],SURF[4],ORB,BRISK等,對尺度、縮放和旋轉具有不變性,同時對光照和旋轉具有一定的魯棒性[5]。特別是基于SIFT算法無人機影像之間的匹配,有眾多學者進行研究,并且提出了多種改進方法。文獻[6]最先驗證SIFT算法應用于遙感影像配準的可行性,文獻[7-9]從特征點描述符和匹配策略方面對SIFT算法進行了改進。但對于特殊區域影像,SIFT算法由于采用高斯濾波建立尺度空間,會造成圖像邊緣模糊和細節丟失,從而導致特征點檢測精度下降,KAZE算法通過建立非線性尺度空間可以避免這種問題。文獻[10]證明了KAZE算法在多源影像的匹配效果優于SIFT算法。文獻[11]驗證了KAZE算法在林區無人機影像拼接方面的優勢。文獻[12]基于改進的KAZE算法應用于鐵路路基探地雷達的圖像配準。文獻[13-14]驗證了AKAZE算法在喀斯特地貌無人機影像匹配中結果優于SURF和BRISK算法。以上研究證明了KAZE算法在特殊區域影像匹配的優越性,但針對露天礦無人機影像匹配的研究相對較少,KAZE算法是否具有適用性還有待研究。
本文針對露天礦階梯狀地形在影像匹配中匹配點數量少的問題,在分析露天礦各功能區影像特征的基礎上,提出利用KAZE算法進行無人機影像匹配,通過實驗證明該方法的有效性,對露天礦無人機影像匹配進行了有益探索。
1 研究區特征分析
露天煤礦采場是由露天開采形成的采坑、臺階和露天溝道的總稱,露天采場按照功能區劃分為:剝離區、采煤區、排土場、礦坑邊端幫和運輸通道。露天礦開采過程中形成高陡的邊坡,這些高陡邊坡的分層稱為臺階,臺階是露天礦采場的基本構成要素[15]。露天礦采區無人機正射影像如圖1所示,表1描述了各區域的影像特征。
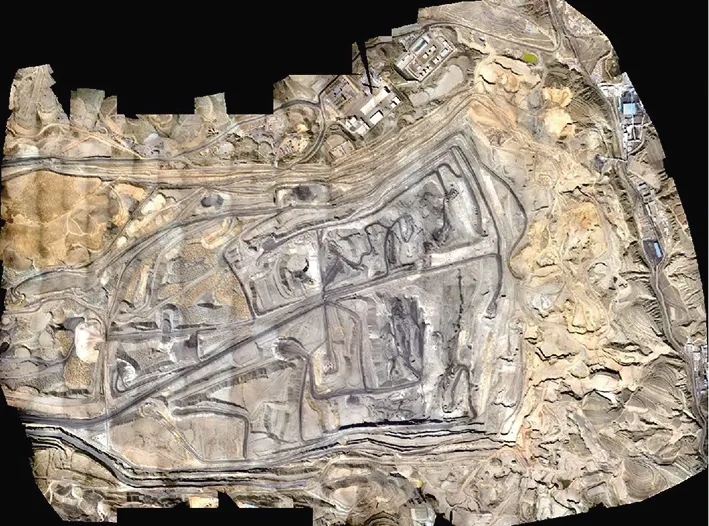
圖1 露天煤礦采區無人機正射影像

表1 露天煤礦區域影像特征
2 影像匹配方法
2.1 KAZE算法
2.1.1 非線性尺度空間的建立
KAZE算法通過非線性擴散濾波和加性算子分裂算法(AOS)建立非線性尺度空間,非線性擴散濾波應用于圖像時,通過流動函數的散度對圖像亮度進行表示,非線性擴散濾波通過偏微分方程表示為:
(1)
式中,c(x,y,t)為傳導函數,(x,y)為像素點坐標,t為擴散時間;div 和分別為散度和梯度算子;L為輸入圖像的亮度。傳導函數表示為:
(2)
(3)
式中,k為對比度因子,控制擴散級別,能夠決定保留多少邊緣信息,k值越大,保留邊緣信息越少。
KAZE算法通過AOS對非線性偏微分方程求解,得到非線性尺度空間不同時間對應的圖像:
(4)
KAZE構造尺度空間與SIFT算法類似,不同的是各層圖像都與原始圖像分辨率相同。構造完成后的尺度空間共分為O組S層,需要將以像素為單位的尺度參數σi轉化為時間單位,轉化關系如下:
(5)
2.1.2 特征點檢測
KAZE特征點檢測通過搜索不同尺度歸一化后Hessian局部極大值點,Hessian矩陣的計算如下:
(6)
與SIFT算法類似,將所有像素點與其周圍和上下2層周圍相鄰像素點共26個點進行比較,獲取特征點后利用三維二次函數進行擬合,利用泰勒展開進行亞像素定位:
(7)
2.1.3 特征點描述
KAZE特征點描述子的構建與SURF算法類似,特征點定位以后,以特征點為中心,6σi為半徑建立圓形搜索區域,計算搜索區域內所有臨近點的一階微分值并進行高斯加權,使距離更近的特征點響應更加明顯。利用一個角度為60°的扇形窗口圍繞特征點進行旋轉,統計區域內疊加后的向量最大值,最大值的向量方向作為主方向。
KAZE算法使用M-SURF描述特征點,以特征點為中心取一個大小為24σi×24σi的窗口作為描述區,將窗口劃分為4×4個子區域,每個子區域計算長度為4的描述向量,4×4個區域共形成64維的描述向量:
(8)
2.2 特征點匹配流程
本文實驗特征點匹配采用歐式距離[17]作為相似性測度,采用近似最鄰近算法(ANN)在待匹配影像上搜索基準影像特征點對應的最鄰近與次鄰近點,利用最鄰近比值法(NNDR)保留小于設定閾值的匹配點對,作為粗匹配點對。誤匹配點的剔除采用隨機采樣一致性(RANSAC)算法,通過RANSAC算法計算2幅影像之間的單應性矩陣,剔除粗匹配中的誤匹配點對。具體的實驗流程如圖2所示。
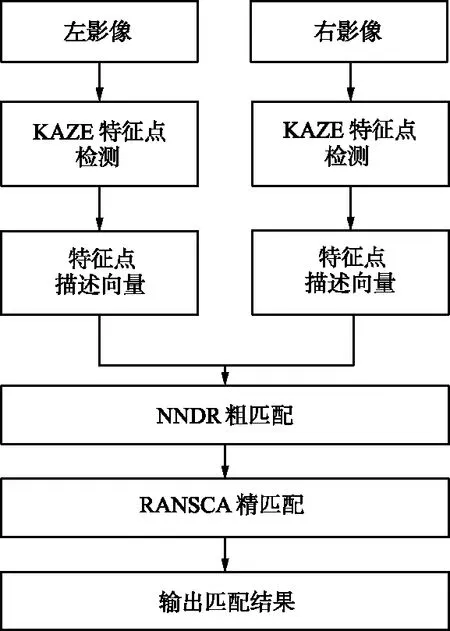
圖2 實驗方法匹配流程
為了驗證本文提出算法的有效性,NNDR的閾值設為0.6,隨機采樣一致性內點的距離閾值設為3,迭代次數設置為30。
2.3 實驗結果評價標準
本文的影像匹配結果評價標準主要采用精匹配結果、正確匹配點數量、匹配精度和匹配時間4項內容作為影像匹配質量的評價指標[18]。
正確匹配點數量是使用RANSAC算法提出錯誤匹配點后剩余匹配點數量,匹配正確率是正確匹配點數量與粗匹配點數量的比值,粗匹配點是采用NNDR匹配得到的匹配點數量。
均方根誤差(RMSE)作為匹配精度的衡量指標,采用左影像上匹配點經過單應矩陣變換后在右影像上的坐標與右影像上匹配點坐標之間的均方根誤差:
(9)
3 實驗結果與分析
3.1 實驗數據
本文的研究區為平朔安家嶺露天煤礦,位于山西省朔州市平魯區境內。影像來源于搭載SONY-ILCE-7R相機的無人機拍攝的露天煤礦影像,幅面大小為7 360 pixel×4 912 pixel,焦距35 mm。為加快匹配速度,在特征提取和匹配前對原始影像進行降采樣處理,壓縮后影像尺寸為920 pixel×614 pixel。本次實驗運行環境為Inter(R)-Core(TM)-i5-8250U,1.80 GHz,內存8 GB,64位Win10筆記本操作系統。
選取了露天礦5組無人機影像作為實驗數據,如圖3所示。

(a)剝離區影像
3.2 實驗結果分析
根據實驗方案,使用SIFT算法、SURF算法和KAZE算法分別對5組影像進行影像匹配實驗,統計提取特征點數量、粗匹配點數量、正確匹配點數和匹配時間等指標,統計結果如表2所示。
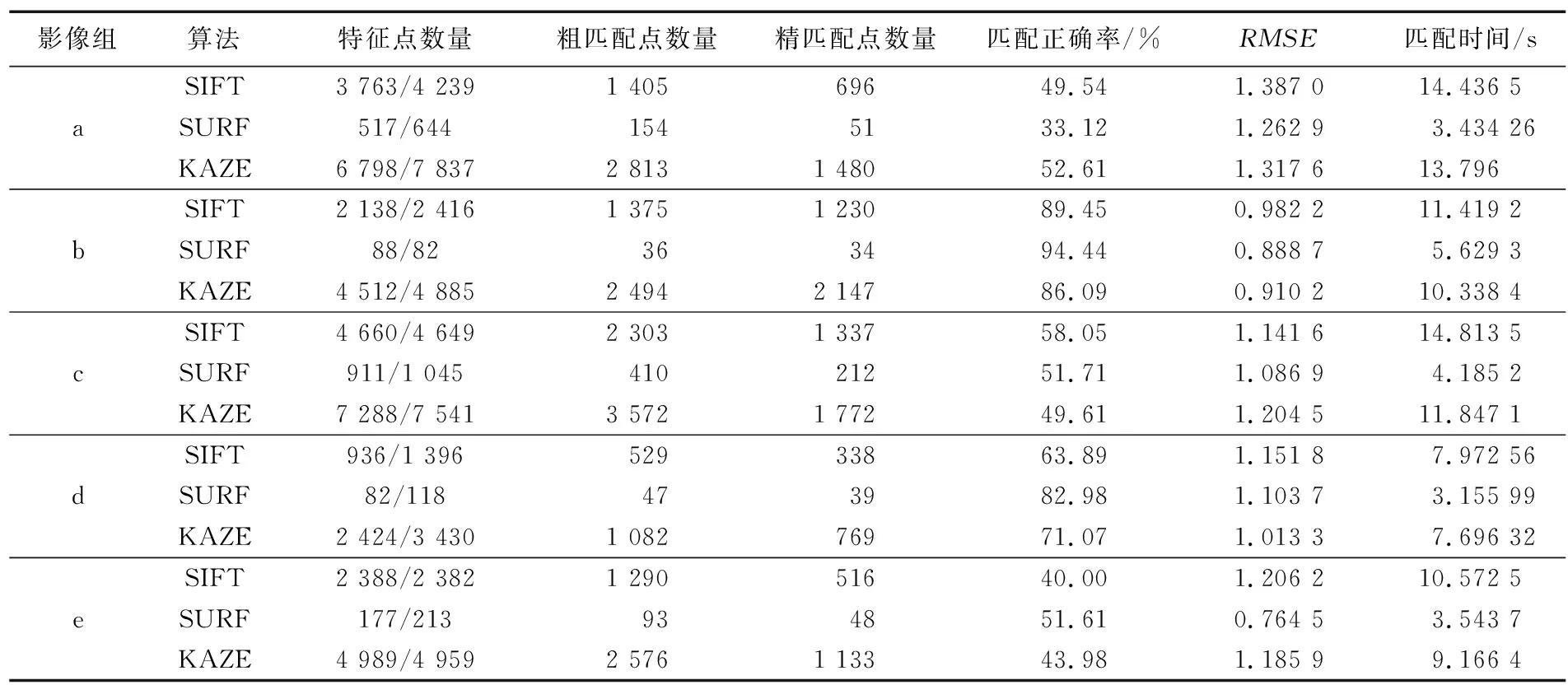
表2 5組影像匹配實驗結果統計
3.2.1 各算法精匹配結果分析
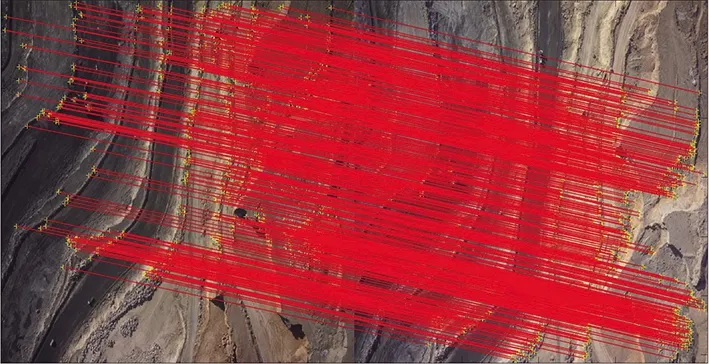
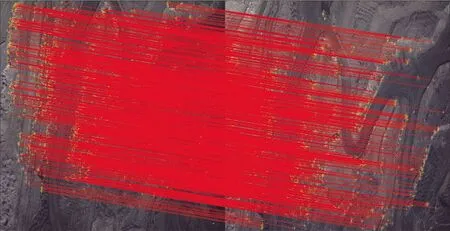
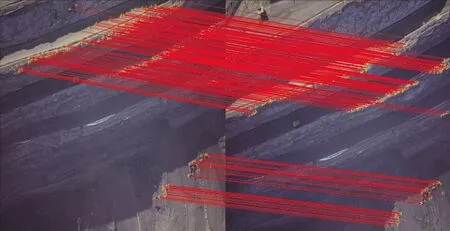
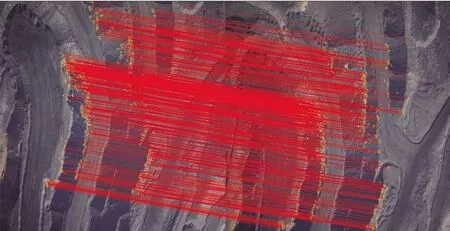
圖4~圖8是SIFT,SURF,KAZE三種算法經過RANSAC優化后5組影像的精匹配實驗結果。從匹配結果可以看出,KAZE算法正確匹配點對數量高于SIFT算法和SURF算法,在D組匹配實驗中獲得了更好的匹配結果,在圖像弱邊緣信息較弱的區域也能得到正確匹配點。這是因為KAZE算法采用非線性空間進行特征點檢測,能保留更多的邊緣信息,在D組邊端幫影像存在陰影的區域,也成功匹配出特征點。
(a)SIFT算法
(a)SIFT算法

(a)SIFT算法
(a)SIFT算法
(a)SIFT算法
3.2.2 正確匹配點數量分析
根據表2統計的5組影像匹配實驗結果,從正確匹配點數量(圖9)分析,利用KAZE算法實驗得到的正確匹配點數量最多,約為SIFT算法的2倍,SURF算法提取數量較少。分析其原因,露天礦主要是運輸通道及臺階狀的功能區組成,運輸通道路面較為平滑,在影像上難以提取有效的特征點,因此匹配的特征點主要以臺階邊緣點為主。由于KAZE算法在特征點提取階段采用非線性濾波構建尺度空間,能夠在平滑內部區域的同時保留邊緣信息,因此能夠提出大量有效的邊緣特征點,所以正確匹配點數量高于SIFT和SURF算法。

圖9 正確匹配點數量對比
3.2.3 匹配精度分析
本文采用經過單應矩陣變換后的匹配點預測位置與對應匹配點正確位置之間的RSME作為匹配精度的評價指標,RMSE值越小,匹配精度越高。匹配精度RMSE對比如圖10所示。可以看出,在5組實驗中,有4組實驗中的SURF算法精度較高,但SURF算法正確匹配點數量太少。有3組實驗中KAZE算法匹配精度高于SIFT算法,有2組實驗中KAZE算法匹配精度低于SIFT算法,整體匹配精度與SIFT算法相近。
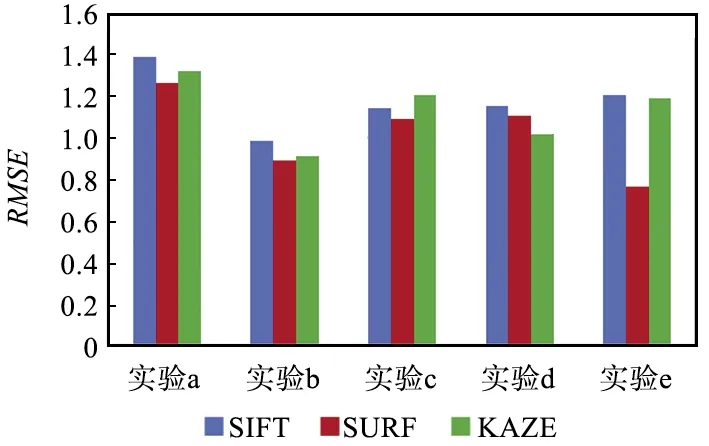
圖10 匹配精度RMSE對比
3.2.4 匹配時間分析
圖11和圖12顯示了5組影像實驗總時間和單點匹配時間對比,在匹配總時間方面,SURF算法由于提取特征點數量太少,因此總時間最短。

圖11 匹配總時間對比
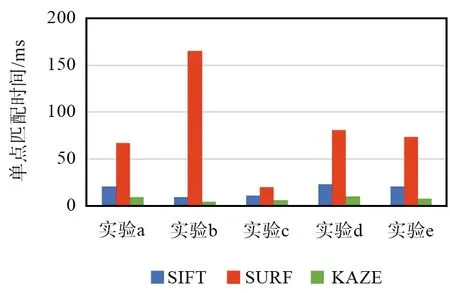
圖12 單點匹配時間對比
在單點匹配時間方面,SURF算法單點匹配時間最高,匹配效率最低。KAZE算法在5組實驗中,總匹配時間和單點匹配時間都優于SIFT算法,在匹配效率方面更適用于露天礦無人機影像匹配。
4 結束語
本文針對露天礦不同區域多樣的地形環境,提出了一種基于KAZE算法的露天礦影像匹配方法,實驗結果表明,在露天礦無人機影像匹配中,本文提出的方法相比經典的SIFT和SURF算法,在特征點數量方面均優于這2種方法,在匹配精度與SIFT算法保持接近的情況下,匹配點數量和匹配時間較SIFT算法均有優勢。同時,在特征點分布方面,KAZE算法匹配點也較為均勻,在邊緣信息較弱的區域也能成功匹配特征點。因此,在露天礦無人機影像匹配應用中,基于KAZE特征和RANSAC的匹配方法是一種穩定有效的方法,適合應用于露天礦無人機影像匹配。但該方法匹配正確率和匹配總時間優勢不明顯,后期研究考慮在特征點篩選和特征描述符構建方面進行優化改進,進一步提高算法的效率和匹配精度。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52