針對機動目標的改進型交互多模型跟蹤算法研究*
2022-04-21 04:43:16楊冬英賀江鵬
計算機工程與科學 2022年4期
楊冬英,賀江鵬
(1.山西大學商務學院,山西 太原 030031;2.山西北方機械制造有限責任公司,山西 太原 030009 )
1 引言
早在20世紀中葉,針對機動目標定位與跟蹤的思想就引起了各國的重視[1]。機動目標的跟蹤最早主要應用于軍事領域,常使用聲納、雷達等對飛機、艦船和導彈等實施定位與跟蹤[2]。由于其復雜程度高和隨機性大,機動目標的跟蹤也成為了目前精確打擊與反打擊的研究熱點。
傳統跟蹤方法主要從2個方面考慮:(1)提高目標模型的魯棒性;(2)提高目標濾波精度。目標模型的測試精度取決于其描述機制,而跟蹤算法的優劣主要體現在其算法的實時性上。對濾波算法的改進主要通過優化求解方式實現,調節目標跟蹤過程中不同的參數可以實現突出目標特征的效果,從而提高濾波精度。目前主流的機動目標跟蹤算法是基于交互多模型IMM(Interacting Multiple Model)[3,4]技術實現的。常見的濾波器有卡爾曼濾波KF(Kalman Filtering)[5]、高斯濾波(Gaussian Filtering)[6]和一些結合型濾波方法,如擴展型卡爾曼濾波EKF(Extended-KF)[7]、不敏型卡爾曼濾波(Unscented-KF)[8]等。
Ehrman等[9]研究了近距離目標的跟蹤識別,提出了針對目標散射面積變化的目標跟蹤算法。Mertens等[10]利用施威林模型對目標散射面分布進行特征分析,從而提升了目標識別精度,并在近距離目標跟蹤實驗中得到了驗證。Zhou等[11]利用多普勒效應求解目標徑向速度,將靜態融合與卡爾曼濾波器相結合,提升了跟蹤性能。Brekke等[12,13]設計了一種基于目標幅度信息的快速信息關聯算法,使跟蹤過程不易丟失目標,魯棒性較好。Bi等[14]利用奇異值分解法對高分辨率距離像進行三維重建,使測試數據可用于目標識別。靳標等[15]利用多特征濾波的方式實現了對高分辨率距離像中多目標的同時求解,提高了跟蹤精度。高穎等[16]將EKF與IMM相結合,提出了一種機動目標的IMM擴展卡爾曼濾波時間配準算法,對低維機動目標具有較好的跟蹤效果。
綜上所述,本文提出了一種改進型交互多模型跟蹤算法,利用對狀態估計中協方差的參數調節,實現與目標特征的數據關聯,從而提高目標識別精度。
2 數學模型的構建
當機動目標在圖像采集區域運動時,可以將其在圖像中投影獲得的偏轉角作為整個跟蹤軌跡的關聯變量,該偏轉角如圖1所示。
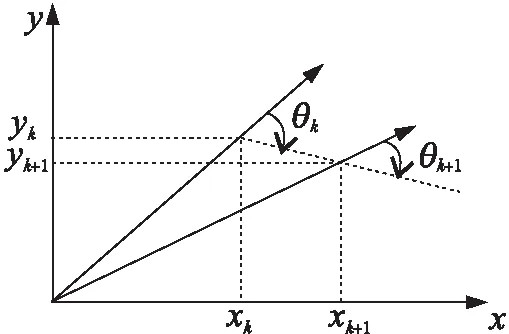
Figure 1 Deflection angles of associated variables
由圖1的角度關系可推導得到目標在圖像中的夾角,如式(1)所示:
(1)
其中,θk表示k時刻的偏轉角度,如圖1中所示;(vx,vy)表示目標在x軸向和y軸向上的速度。在此基礎上,目標的狀態可以由狀態方程表示,如式(2)所示:
(2)
其中,Xk表示k時刻目標的狀態;T表示轉置;(xk,yk,zk) 為k時刻3個軸向上的位置量;(vxk,vyk,vzk) 為k時刻在3個軸向上的速度;Fk|k-1為目標轉移矩陣;wk-1為白噪聲。
3 改進型交互多模型跟蹤算法設計
改進型交互多模型跟蹤算法是在IMM的基礎上實現的,為了解決非線性濾波問題,本文引入了與目標特征具有關聯性的協方差參數調節項,從而使非線性濾波過程具有目標特征參考因素,進而提高目標識別精度。
3.1 改進型IMM模型
圖2是改進型IMM模型結構圖。由圖2可知,首先是數據輸入層的信息交互,在第k-1時刻,交互產生的第n個濾波器的輸入數據可表示為式(3):
(3)

(4)

在k-1時刻濾波輸入的基礎上,可得到k時刻的濾波輸出,其概率更新如式(5)所示:
(5)

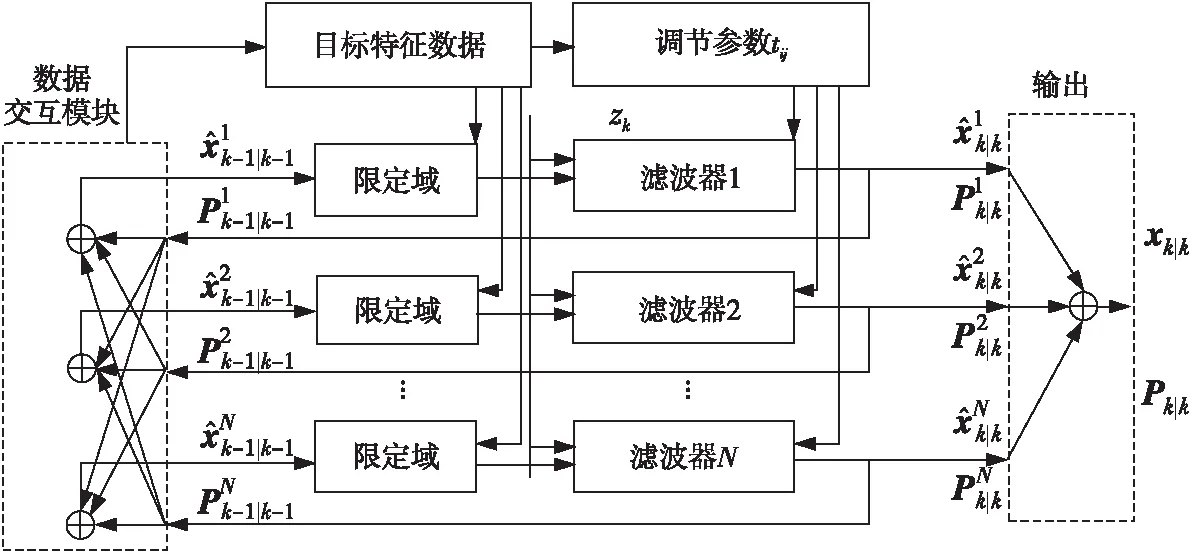
Figure 2 Improved IMM model
3.2 目標特征關聯參量濾波
傳統方法是在IMM模型的基礎上將對應類型的濾波器模塊加載到圖2中濾波器N的位置,從而實現對目標的濾波識別。本文算法的核心思想是在輸入端將目標特征信息作為邊界條件與輸入數據進行相關運算,然后再通過在濾波器中設置調節參數的方式來實現對目標特征的精確篩選,進而提高識別精度。引入具有目標特征關聯性的參量步驟如下所示:
步驟1測量數據與目標特征數據交互計算,則在k-1時刻時,任意2個參量之間的交互概率可表示為式(6):
(6)
其中,tij為目標特征數據組調節參數,其它各參數定義與前文一致。
由此在n個運動模型中,可得引入調節參數的狀態估計和交互協方差如式(7)所示:
(7)
步驟2對測量數據和狀態數據進行更新,將引入目標特征的數據作為濾波器輸入數據,即在zk位置將原數據進行特征化更新,則交互協方差如式(8)所示:
(8)
由式(8)可知,原有測量數據與特征數據匹配后得到的新數據是計算交互協方差的依據。與之對應的模型i條件下的狀態增益矩陣和協方差矩陣可表示為式(9):
(9)
步驟3將在模型i條件下的狀態估計與協方差計算遍歷到所有測量數據中,得到最終的狀態估計與估計協方差,如式(10)所示:
(10)
步驟4以式(10)的最終結果作為輸出,完成測量數據目標識別的分類計算。由于在輸入數據端測量數據是預先與目標特征模型進行匹配的,所以當進入濾波算法時,只要對特定目標的特征信息進行迭代對比,目標的可識別性就會大大增加,從而顯著提升系統識別精度。
改進算法將具有目標特征的限定域以濾波函數的方式引入到數據計算中,可以等效成在原有數據運算過程中增加了一個與限定域求交集的過程,這個交集運算能大幅降低原有數據的維度,故對總體數據運算量的降低具有很好的作用。傳統算法與改進算法的運算量之比為限定域系數平均值的反比,可知改進算法的運算量被大幅減小,加快了算法運行速度。
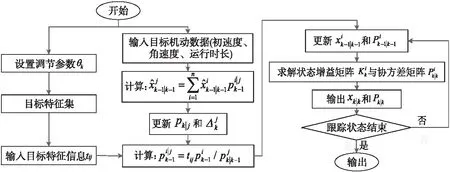
Figure 3 Flow chart of interactive multi-model tracking algorithm
3.3 算法實現流程
根據模型結構和可調參量對模型改進的關系可知,本文算法將目標特征信息作為先驗條件對初始數據進行匹配,實現預處理數據選擇的指向性;然后再在濾波算法中以目標特征作為邊界約束條件提高目標識別精度,算法流程如圖3所示。因為在實際環境中無法預知的環境噪聲是使測試系統測試精度突然出現錯誤的重要因素,故分析隨機噪聲背景比某類型系統噪聲更有意義。為了更好地模擬目標跟蹤過程,在仿真分析過程中添加了隨機噪聲。
4 實驗與結果分析
為了驗證本文算法的可行性,采用對相同數據組進行識別分析的方法,分別用本文算法和傳統IMM算法對仿真數據進行目標識別與跟蹤。
4.1 仿真過程參數設置
機動目標模擬仿真過程為先完成一段均速飛行,時速150 m/s,運動40 s(勻速模式,CV,Constant Velocity);再以角速度0.03 rad/s的速度完成轉彎,運動20 s(勻速轉彎模式,CT,Constant Turn);最后以10 m/s2的加速度,運動40 s(勻加速模式,CA,Constant Accelerate)。實驗對整個運動軌跡過程進行跟蹤計算,并對比2種算法的跟蹤精度。仿真過程中,為了同時考察運動實時性對跟蹤效果的影響,給出了不同偏轉角條件下的算法求解差異。
4.2 評價標準
算法的最終目的是完成目標的定位與跟蹤,所以目標的位置與速度求解精度是重要的評價標準。設采樣時刻k時,測量目標的位置是(xk,yk),x軸和y軸的表達方式相同。則其位置的均方根誤差(Error|xk)和速度的均方根誤差(Error|vk)可表示為式(11):
(11)
其中,N表示算法迭代總次數,i表示第i次實驗,x表示位置,v表示速度。由此完成對不同算法跟蹤結果的評價。
4.3 測試結果分析
分別采用傳統IMM算法和本文算法對相同的模擬航跡數據進行跟蹤計算,同時,本文算法分別采用偏轉角計算精度為1°,2°和4°的不同閾值檔位。仿真結果如圖4所示。
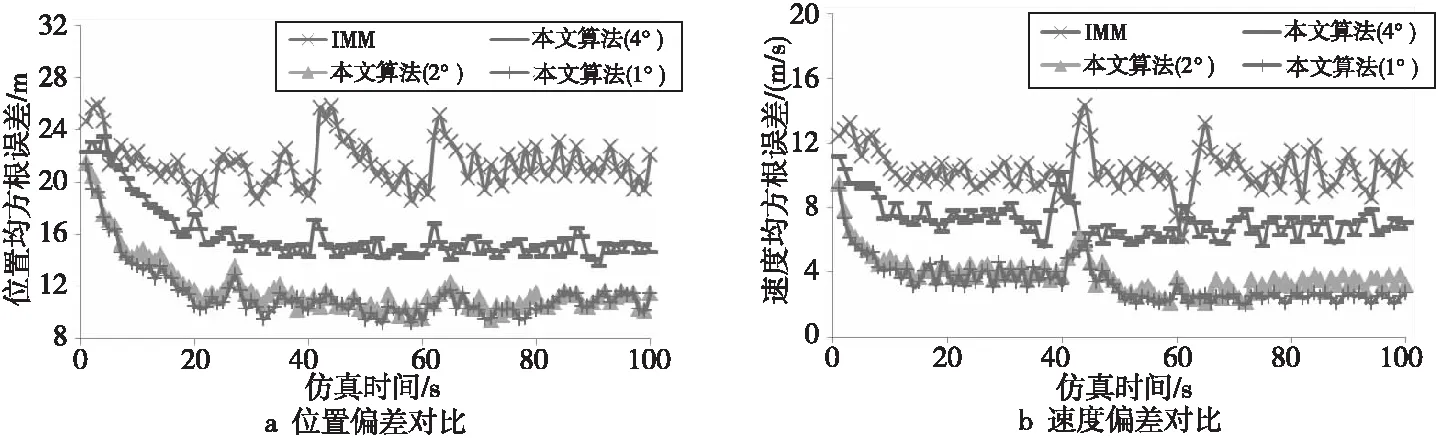
Figure 4 Comparison of tracking error results under different parameter conditions
在整個機動目標跟蹤過程中,位置均方根誤差變化由圖4a所示,傳統IMM算法的位置均方根誤差均值為21.39 m,而在本文算法中偏轉角分別為4°,2°和1°時,均方根誤差均值分別為15.91 m,11.79 m和11.39 m。仿真結果顯示,不同的偏轉角對算法計算獲得的精度是有影響的,當偏轉角為1°和2°時,精度基本一致,但當偏轉角設置為4°時,精度明顯下降,故在實際測試應用中要求采樣速度滿足偏轉角變化小于2°,以保證計算精度。由此可知采用本文算法的位置跟蹤精度優于采用傳統IMM算法的,同時,隨著本文算法中調節參數偏轉角的引入,算法精度可以進一步提高,當其小于2°時,均值優于12 m。同時,可以看出偏轉角為1°時,誤差的降低幅度相比于2°時下降不明顯,但其運算量卻要增加一倍,故在本文優化過程中,為了保證算法的實時性,最終選擇2°作為算法偏轉角參數的最優值。在40 s與60 s處出現了2處誤差峰值,分析起源在于該時刻目標機動的類型突然轉變,對位置和速度的預估均有一定影響,但隨著時間的推移,該誤差會逐漸恢復到正常水平。此誤差波動現象在傳統算法中比較明顯,而采用偏轉角參數校正的本文算法中,該現象會隨著偏轉角設置精度的提高而受到抑制。由此可見,通過調節參數設置的方法對傳統算法進行改進確實可以實現位置及速度跟蹤精度的提升。
5 結束語
本文提出了一種改進型交互多模型跟蹤算法,通過引入包含目標特征信息的調節參數偏轉角作為算法反饋調節量,完成對初始數據的匹配,并以對應的匹配濾波器實現有效數據的保留。該算法相比傳統IMM算法而言,位置和速度的跟蹤精度均有所提高,并對運動狀態改變導致的誤差激增有較好的抑制效果。總之,該算法在提高機動目標跟蹤精度方面具有一定的應用價值。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
數學物理學報(2020年2期)2020-06-02 11:29:24
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03