基于激光掃描技術(shù)的室內(nèi)空間定位*
2022-04-23 02:27:14梁曉旭
智能建筑電氣技術(shù) 2022年1期
梁曉旭, 劉 敏, 張 舉, 何 為, 劉 鵬
(建科公共設(shè)施運營管理有限公司,北京 100044)
0 引言
隨著我國城市化進程的不斷加快以及配套基礎(chǔ)設(shè)施的不斷完善,建筑中存在大量能源、環(huán)境、狀態(tài)傳感器,分散于空間中的各個位置,并以各種編號規(guī)則存在于各個專用系統(tǒng)中,在BIM數(shù)字孿生過程中,上述專用系統(tǒng)以數(shù)據(jù)接口方式對接平臺,這種對接類似于一個顯示的分屏器,僅能做數(shù)據(jù)的展示或在本系統(tǒng)維度上做分析,系統(tǒng)間的數(shù)據(jù)在時間、空間、業(yè)務(wù)上缺少統(tǒng)一而無法進行協(xié)調(diào)分析和聯(lián)動;同時,相較于傳統(tǒng)物業(yè)的人工運維業(yè)務(wù)有極強的落地性和可操作性,數(shù)字運維僅在信息匯總和展示層級做文章,沒有落實到業(yè)務(wù)中,且運維團隊中圍繞空間位置轉(zhuǎn)達的設(shè)備名稱、工具準(zhǔn)備、人數(shù)需求、工作深度等信息,在現(xiàn)有市場上的任何系統(tǒng)與管理平臺中都沒有體現(xiàn);此外,現(xiàn)狀運維單位受限于專業(yè)能力,較難做到通過BIM模型的更新及時跟進建筑室內(nèi)空間的變化。因此,如何加快推進公共設(shè)施的智慧化運營管理模式,實現(xiàn)設(shè)備的自動識別定位成為了現(xiàn)代運維公司亟待解決的問題之一,也是公共設(shè)施運維管理突破傳統(tǒng)轉(zhuǎn)向智慧空間數(shù)字化管理的重要一環(huán)[1-3]。傳統(tǒng)采集手段多采用GPS+IMU作為組合模塊獲取三維信息[4],然而該方法在地下或室內(nèi)等缺少GPS信號的場景中具有局限性,同時室內(nèi)空間的復(fù)雜性導(dǎo)致傳統(tǒng)作業(yè)方式受到很多局限,掃描時存在死角[5]。因此,在實際運維工作中有必要采取一些手段來獲取室內(nèi)及地下的全部三維信息,目前最有效的方式是采用移動測量系統(tǒng)進行快速掃描與定位。
移動測量系統(tǒng)一般采用LiDAR(激光雷達)、全景相機、IMU(慣性測量單元)來檢測。LiDAR具有實時性迅速、精度高、誤差相對小且恒定、不受GPS信號以及室內(nèi)光線限制等優(yōu)點,在生成地圖、建模等方面具有很高的應(yīng)用[6];雖然能提供較高精度的結(jié)果,但其容易受到外界環(huán)境特征影響,當(dāng)特征不顯著時,采集頻率低,其精度也大大降低。相較LiDAR來說,IMU技術(shù)不受外界環(huán)境影響,能提供高頻的位置、速度等參數(shù),但是長時間運行后其定位誤差會積累,因此,IMU只能在短時間內(nèi)提供高精度的定位結(jié)果。LiDAR和IMU結(jié)合了兩種技術(shù)的定位優(yōu)勢,相互補充,因此可在室內(nèi)和地下環(huán)境中實現(xiàn)高精度和高采樣頻率連續(xù)工作。
綜上,本文直接采用基于“LiDAR + IMU”的組合掃描定位技術(shù)來獲取室內(nèi)及地下環(huán)境的三維信息,本方法為建筑環(huán)境中的各種傳感器的空間定位提供了新思路,并在智能化運維速度、精確度以及便捷部署度上給予支持。
1 傳感器原理
1.1 QS輕型室內(nèi)測量
QS輕型室內(nèi)測量系統(tǒng)主要是采用多傳感器融合SLAM算法,以低成本傳感器完成高精度掃描,適用于室內(nèi)場景、室外中小級場景。該系統(tǒng)由兩臺激光掃描儀、RTK、IMU、全景相機等組成(室內(nèi)環(huán)境無需開啟RTK,故此處不贅述),其中掃描儀采用VLP-16線激光雷達,測量距離100m,每秒可輸出30萬個數(shù)據(jù)點,±15°垂直視野,360°水平視場掃描;系統(tǒng)配備的Novatel 718D RTK支持千尋厘米級定位;MEMS級IMU具有較高的采樣率和運算速度,因此可以實現(xiàn)極短的時延;全景相機采集系統(tǒng)置于系統(tǒng)最上端,能夠俯拍整個畫面。表1所示為QS輕型室內(nèi)測量系統(tǒng)硬件指標(biāo)。

QS輕型室內(nèi)測量系統(tǒng)硬件指標(biāo) 表1
激光雷達工作原理類似聲吶,將激光束作為其探測信號,測量傳感器和被測物體之間的距離和角度[7]。LiDAR工作時,發(fā)射器發(fā)出激光束,激光被發(fā)射后,一部分激光被反射回來并被接收設(shè)備接收[8],根據(jù)激光發(fā)射與接收的時間差計算傳感器與目標(biāo)物體之間的距離[9-10];根據(jù)激光束頻率變化、方向等可確定目標(biāo)物體的方位以及速度[11-12]。
1.2 手持式傳感器采集設(shè)備
QS輕型室內(nèi)測量系統(tǒng)在使用上不便于普通運維操作人員學(xué)習(xí),因此為了實現(xiàn)對室內(nèi)建筑中所安裝的新型傳感器的空間信息等進行智能化采集,普通運維人員經(jīng)過簡單培訓(xùn)就能進行物聯(lián)網(wǎng)設(shè)備的標(biāo)定與連接,設(shè)計采用手持式傳感器采集設(shè)備,從而為后續(xù)的各類型智能應(yīng)用提供基礎(chǔ)數(shù)據(jù)。手持式傳感器采集設(shè)備為新型傳感器智能監(jiān)控設(shè)備,其硬件系統(tǒng)見表2。
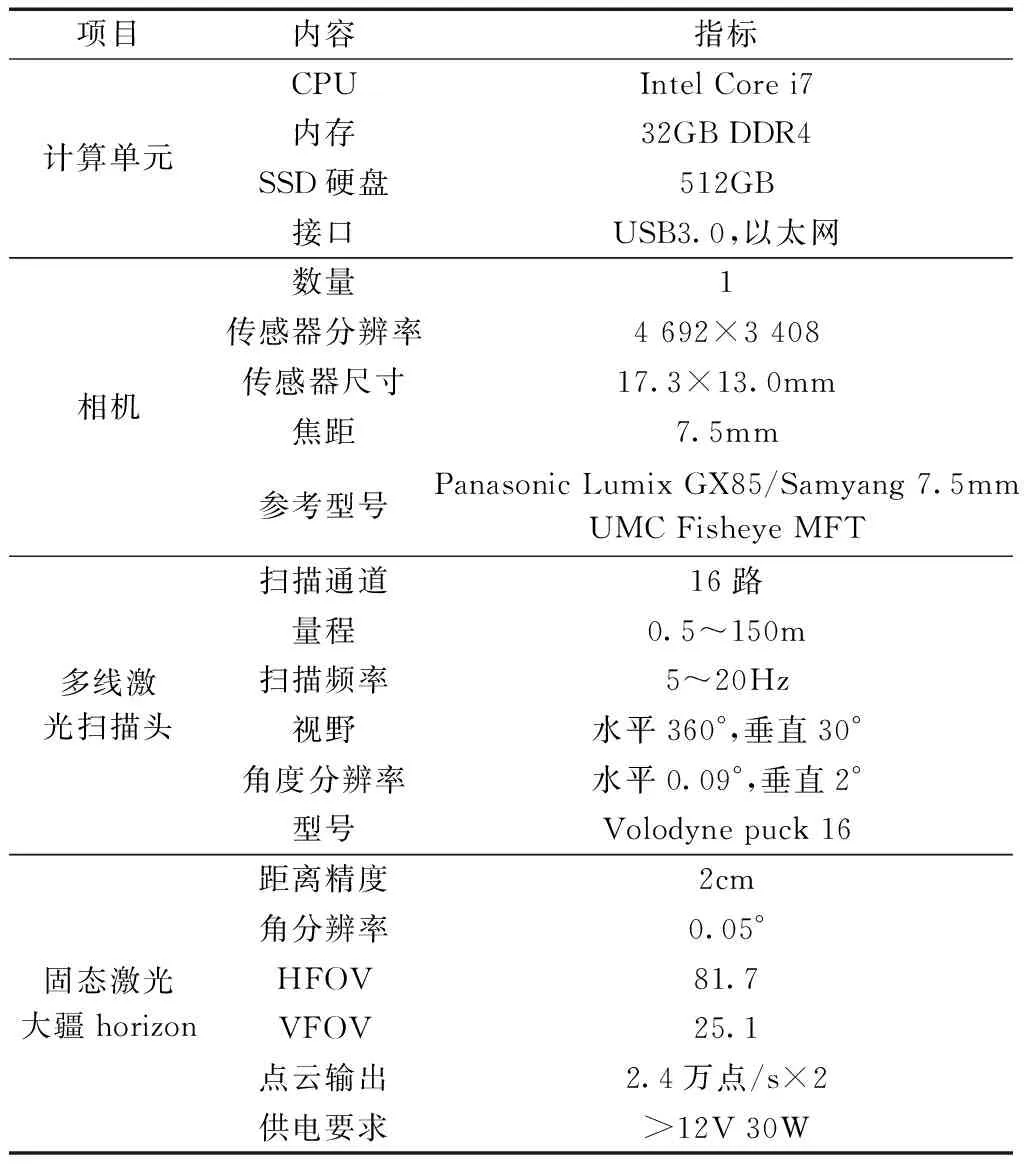
手持式傳感器采集設(shè)備的硬件系統(tǒng) 表2
傳統(tǒng)的室內(nèi)掃描方案大多基于單線/多線激光SLAM的技術(shù)方案,單線SLAM在非平面地形下無法使用,多線SLAM雖能適應(yīng)復(fù)雜地形,但在幾何特征少、重復(fù)度較大的場景下容易失效;在場景較單調(diào)等紋理和語義信息都不夠豐富的情況下,視覺SLAM的應(yīng)用同樣會受限。綜上,多線激光SLAM技術(shù)利用環(huán)境的幾何信息,視覺語義SLAM利用環(huán)境的紋理和語義信息,二者形成有效的信息互補,同時IMU在短時內(nèi)作為運動預(yù)測的有效補充,可有效解決瞬時快速旋轉(zhuǎn)等問題。綜上,本技術(shù)為一種混合SLAM方案,通過對IMU、激光、相機的圖像處理,綜合利用環(huán)境的幾何、紋理及語義等信息,提高在不同場景下的精度。
2 項目實施方案
在項目的實施過程中,主要分為建筑物三維實景地圖采集、三維實景地圖與BIM模型融合、新型傳感器數(shù)據(jù)采集和智能化數(shù)據(jù)后處理四部分。
(1)建筑物三維實景地圖采集
掃描前首先要檢查設(shè)備以及可能用的輔助設(shè)備的完整性,并了解采集區(qū)域的環(huán)境狀況等從而進行路線規(guī)劃和控制點的布設(shè),本項目要求達到20cm的精度要求,用全站儀將控制點坐標(biāo)測出備用。采集時依次開啟傳感器開關(guān)、Camera,等待10s左右(聽到相機曝光兩聲)開始按規(guī)劃路線進行采集,對于不需要采集或重復(fù)的路段,點擊暫停記錄,隨后行駛至待采集路段點擊恢復(fù)記錄,這樣能夠減少數(shù)據(jù)量,但同時要注意暫停記錄和恢復(fù)記錄的位置數(shù)據(jù)可多但不能少,避免數(shù)據(jù)丟失;對于閉合路線采集結(jié)束時,閉合路線要有一小段的重復(fù)軌跡,采集完成時,停止記錄、查看數(shù)據(jù)并關(guān)機。
將獲取的原始點云數(shù)據(jù)等拷貝到服務(wù)器上,基于多傳感器融合SLAM算法進行成果點云解算,形成高精度軌跡數(shù)據(jù);利用已測控制點和點云中同名點比對,統(tǒng)計點云精度,如果不滿足要求則進行控制點糾正;糾正后進一步點云優(yōu)化,包括去噪、去除動態(tài)物體、壓薄處理等;將全景RGB映射到優(yōu)化后的點云上,形成彩色點云;點云數(shù)據(jù)打包后,將分塊的彩色點云文件合并成LAS格式文件作為最終點云成果。
(2)三維實景地圖與BIM模型融合
在三維實景地圖中,選取一些特征明顯的標(biāo)志點作為控制點,對其進行編號,并采集其空間位置信息;在BIM模型中,根據(jù)選取的控制點信息,對應(yīng)的選取其在BIM模型中的空間位置信息,作為同名點數(shù)據(jù);根據(jù)多組同名點數(shù)據(jù),得到變換矩陣,將矩陣作用于源數(shù)據(jù)(實景地圖/BIM模型),即可實現(xiàn)二者的相互變換,從而完成兩種數(shù)據(jù)在空間上的融合統(tǒng)一。
現(xiàn)場人員持手持設(shè)備在建筑物內(nèi)部指定位置開機,并進行多模態(tài)實時數(shù)據(jù)采集,對于待采集的傳感器,應(yīng)將手持設(shè)備近距離對準(zhǔn)傳感器進行針對性采集。將采集到的數(shù)據(jù)拷貝到服務(wù)器,并導(dǎo)入到智能化數(shù)據(jù)后處理平臺進行解算,自動生成傳感器數(shù)據(jù)信息。
3 結(jié)束語

猜你喜歡
中國特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:26:08
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中華手工(2017年2期)2017-06-06 23:00:31
工業(yè)設(shè)計(2016年12期)2016-04-16 02:52:00
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
中外會展(2014年4期)2014-11-27 07:46:46
消費者報道(2014年7期)2014-07-31 11:23:57
