基于光子多普勒測(cè)速的長(zhǎng)景深動(dòng)態(tài)測(cè)試研究
2022-04-23 10:25:50武錦輝馮進(jìn)寶嚴(yán)賽美
激光與紅外 2022年3期
司 宇,劉 吉,武錦輝,馮進(jìn)寶,劉 昊,嚴(yán)賽美
(中北大學(xué)信息與通信工程學(xué)院,山西 太原 030051)
1 引 言
光子多普勒測(cè)速技術(shù)(Photonic Doppler Velocimetry,PDV)是采用外差法進(jìn)行速度測(cè)量的技術(shù)[1],具有結(jié)構(gòu)簡(jiǎn)單、測(cè)速范圍大、數(shù)據(jù)處理相對(duì)簡(jiǎn)單、測(cè)試精度高、健壯性好的特點(diǎn),適用于勻速運(yùn)動(dòng)以及速度變化劇烈的被測(cè)物[1-4],適用于多種場(chǎng)景。
國(guó)外對(duì)于PDV的研究以美國(guó)Lawrence Livermore、Los Alamos、Sandia實(shí)驗(yàn)室等為代表,主要致力于解決超高速測(cè)量領(lǐng)域,例如破片、內(nèi)爆、聚變等場(chǎng)景下PDV信號(hào)頻率過(guò)高和硬件采樣率不足、探測(cè)器帶寬不夠、時(shí)間分辨率低之間的矛盾,例如早期提出利用調(diào)諧激光器進(jìn)行光學(xué)降頻、微波混頻進(jìn)行電信號(hào)降頻,近年Mance.J.G等提出以啁啾脈沖激光代替連續(xù)激光提高時(shí)間分辨率的方式[5-8]。而在大范圍測(cè)試應(yīng)用中,以德國(guó)Polytec公司等為代表的激光測(cè)振儀具有代表性,其工業(yè)級(jí)產(chǎn)品IVS-500最大工作距離3 m,可通過(guò)調(diào)節(jié)檔位實(shí)現(xiàn)最高2000 mm/s的振速測(cè)測(cè)量。
國(guó)內(nèi)對(duì)于PDV的研究自上世紀(jì)末就已見(jiàn)報(bào)道,中國(guó)工程物理研究院在PDV的研究方面取得了矚目的成績(jī),針對(duì)單點(diǎn)、多點(diǎn)測(cè)量,破片、爆轟測(cè)量的實(shí)驗(yàn)應(yīng)用中成果顯著,達(dá)到了國(guó)際領(lǐng)先水平[2,9],近年馬鶴立等在PDV光路結(jié)構(gòu)基礎(chǔ)上利用頻域干涉實(shí)現(xiàn)了小口徑長(zhǎng)身管內(nèi)徑測(cè)量,200 mm的范圍內(nèi)與千分尺測(cè)量極差為0.014 mm[10]。在動(dòng)態(tài)測(cè)量方面,彭映成等用PDV結(jié)構(gòu)設(shè)計(jì)了景深±2 cm的振動(dòng)位移傳感器用于測(cè)量防護(hù)體受沖擊波的形變位移[11],王韻致等公布了一種復(fù)合光纖的馬赫-增德?tīng)柾獠罡缮嫖灰圃诰€測(cè)量系統(tǒng),100 μm位移測(cè)量標(biāo)準(zhǔn)差為6 nm。
上述應(yīng)用均基于短距離、高速運(yùn)動(dòng)測(cè)量或者低速精密位移測(cè)量。本文在長(zhǎng)距離動(dòng)態(tài)測(cè)試應(yīng)用背景下,如測(cè)量槍械自動(dòng)機(jī)運(yùn)動(dòng)狀態(tài)、工業(yè)自動(dòng)化控制監(jiān)測(cè)等,設(shè)計(jì)PDV系統(tǒng)和實(shí)驗(yàn)環(huán)境并進(jìn)行測(cè)試分析。
2 PDV與大景深動(dòng)態(tài)測(cè)試原理
PDV基于邁克爾遜干涉儀模型,本質(zhì)上對(duì)于信號(hào)光的耦合功率有一定要求,而對(duì)成像不做要求。
根據(jù)光電探測(cè)器的光強(qiáng)響應(yīng)原理,光電探測(cè)器產(chǎn)生的干涉電信號(hào)可表示為:
(1)

(2)

在PDV的實(shí)際使用中,由于單模光纖的數(shù)值孔徑較小、光纖微透鏡耦合輸出的激光光束具有一定發(fā)散角。動(dòng)態(tài)測(cè)試中,該共軸光學(xué)系統(tǒng)的有效耦合空間十分有限,只局限于近軸區(qū)。利用發(fā)散角小于1°的微棱鏡紅外反射膜貼在被測(cè)物表面以提高耦合效率。光纖微透鏡直徑3 mm,60 mW出射激光在距離透鏡面1.5 m處由紅外光敏檢測(cè)卡測(cè)量光斑大小為8.5 mm,同時(shí)具有光功率48 mW。實(shí)測(cè)150 cm距離時(shí)環(huán)形器3端口靜態(tài)信號(hào)光功率為20~30 μW,在30 cm處的靜態(tài)信光功率可達(dá)260 μW,經(jīng)過(guò)EDFA放大濾波后可滿足探測(cè)器響應(yīng)條件。激光系統(tǒng)和探測(cè)器本身噪聲為8 mV,用微擾動(dòng)的方式測(cè)量150 cm處干涉信號(hào)信噪比,得16 dB≤SNR≤23 dB,滿足信號(hào)解調(diào)要求。
光學(xué)模塊方面,本系統(tǒng)采用的激光器線寬為15 kHz,波長(zhǎng)為1550.12 nm。激光經(jīng)過(guò)隔離器后由EDFA放大后進(jìn)入保偏環(huán)形器,耦合進(jìn)入工作距離300 mm帶單模尾纖的非球面鏡后出射到待測(cè)點(diǎn)位,使用空間光功率計(jì)測(cè)量探頭出射激光功率為60 mW。被測(cè)滑塊表面貼紅外原向反射膜,反射信號(hào)光耦合進(jìn)入非球鏡,通過(guò)帶0.4 nm帶通ASE濾波的預(yù)放EDFA進(jìn)行放大,再經(jīng)由衰減器接入10GHz響應(yīng)率的PD探測(cè)器(科揚(yáng)光電,型號(hào)KY-PRM-10G-1-FA)轉(zhuǎn)化為電信號(hào),并用采集卡和示波器同步采集,通過(guò)上位機(jī)處理;被測(cè)物設(shè)置方面,選擇無(wú)桿氣缸的滑塊作為被測(cè)速度源。
3 激光干涉測(cè)速實(shí)驗(yàn)系統(tǒng)
為驗(yàn)證PDV在大范圍動(dòng)態(tài)測(cè)量的應(yīng)用可行性,搭建PDV干涉測(cè)速系統(tǒng),系統(tǒng)包括光學(xué)模塊和軟件模塊兩部分,并設(shè)置符合條件的速度源進(jìn)行實(shí)驗(yàn)測(cè)試,實(shí)驗(yàn)系統(tǒng)結(jié)構(gòu)如圖1所示。
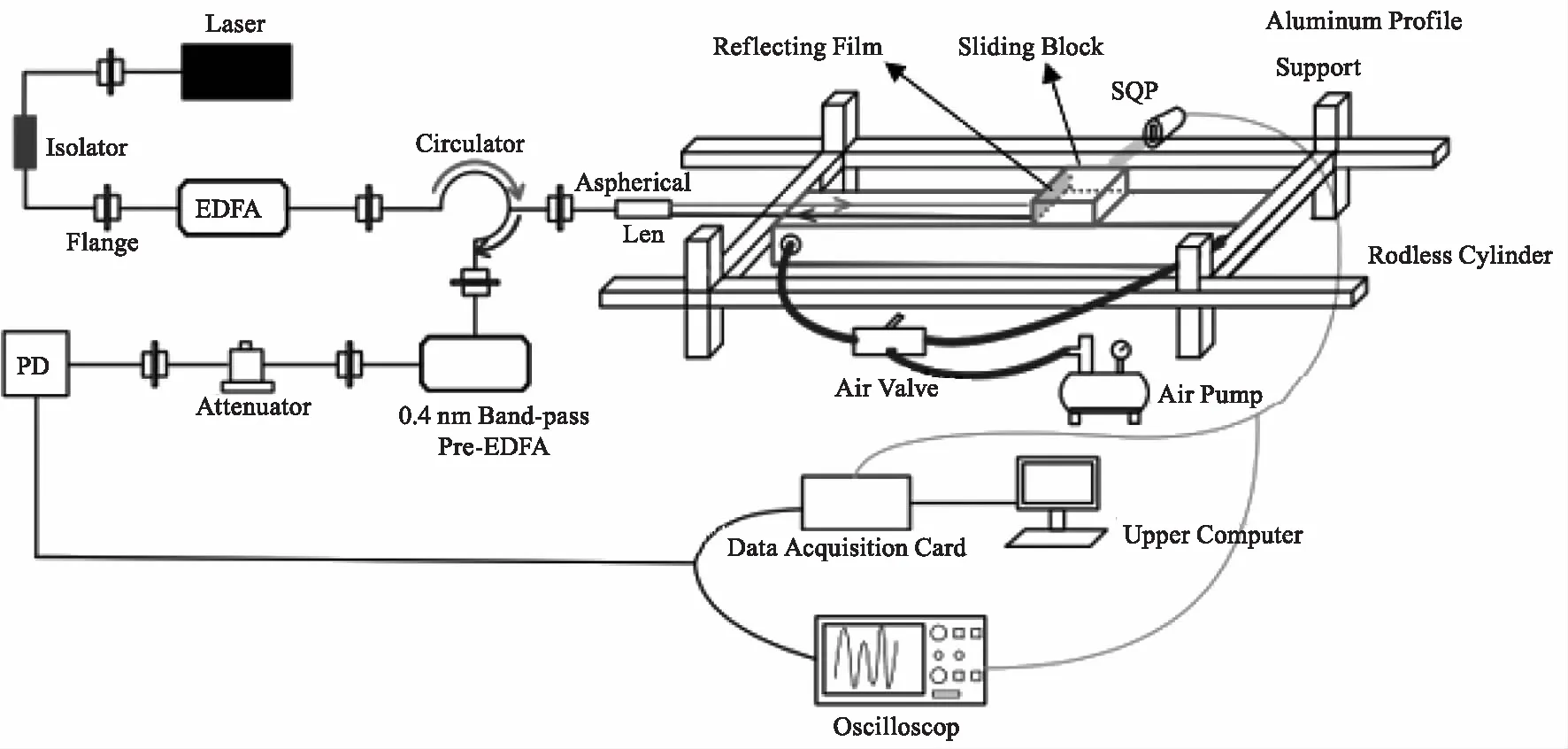
圖1 實(shí)驗(yàn)系統(tǒng)組成結(jié)構(gòu)圖
整體實(shí)驗(yàn)流程如下:
實(shí)驗(yàn)所使用的空壓機(jī)工作產(chǎn)生氣體壓力0.7 MPa,在該氣壓下通過(guò)手動(dòng)控制空壓機(jī)閥門開(kāi)關(guān)來(lái)推動(dòng)滑塊從起點(diǎn)位置開(kāi)始運(yùn)動(dòng),以滑塊撞擊氣缸導(dǎo)軌另一端為止停止運(yùn)動(dòng)。
實(shí)驗(yàn)之前使用光電探測(cè)器、一字線激光器、1 mm寬條紋遮擋的原向反射膜對(duì)氣缸滑塊的運(yùn)動(dòng)速度范圍進(jìn)行粗略測(cè)量(如圖2),測(cè)量結(jié)果表明氣缸空載、0.7 MPa壓力下滑塊的最高速度可達(dá)10~14 m/s,信號(hào)光多普勒頻移在12.9 MHz~18.06 MHz。
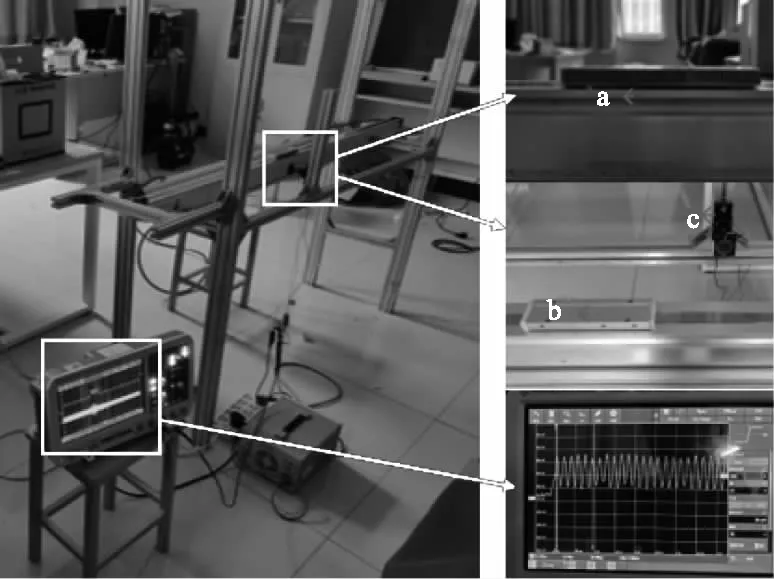
(a-條紋遮擋的反射膜;b-滑塊;c-光電探測(cè)器和一字激光器)
采用固定支架減少滑塊沖擊無(wú)桿氣缸造成的氣缸位移和振動(dòng)影響,用接近開(kāi)關(guān)(SQP)、LED和光電二極管構(gòu)成滑塊運(yùn)動(dòng)的外觸發(fā)信號(hào),如圖3所示。
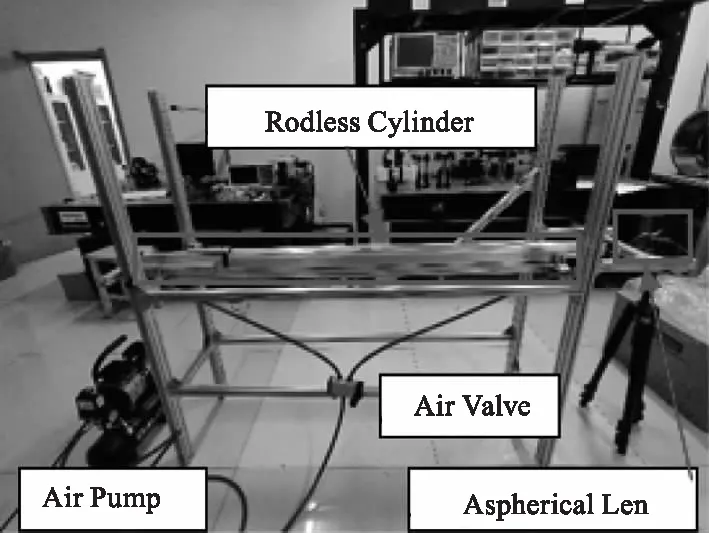
圖3 無(wú)桿氣缸實(shí)驗(yàn)設(shè)置
實(shí)驗(yàn)開(kāi)始前,標(biāo)記導(dǎo)軌上一點(diǎn)作為滑塊運(yùn)動(dòng)的固定起始位置,測(cè)量起始位置至末端距離133.7076 cm。以可見(jiàn)光接入探頭校準(zhǔn)光路,調(diào)整探頭出射光路和滑塊運(yùn)動(dòng)軌道平行。設(shè)置示波器、采集卡以62.5 MHz采樣率進(jìn)行采樣。
4 速度測(cè)試實(shí)驗(yàn)和數(shù)據(jù)處理
采集卡采集的多普勒頻移信號(hào)經(jīng)過(guò)LabWindows編寫的上位機(jī)軟件顯示結(jié)果如圖4所示。
圖4中所示干涉條紋圖像橫軸為采樣點(diǎn)數(shù),共計(jì)25000000,采樣時(shí)間長(zhǎng)度為400 ms,采樣率fs=62.5 MHz,縱軸為4096級(jí)歸一化量化電壓。包含無(wú)桿氣缸滑塊運(yùn)動(dòng)的全程速度干涉信號(hào),按時(shí)間截取其中有效部分,以N=131072點(diǎn)加窗、M=10000更新點(diǎn)進(jìn)行FFT時(shí)頻變換,所得時(shí)間-速度曲線如圖5所示。
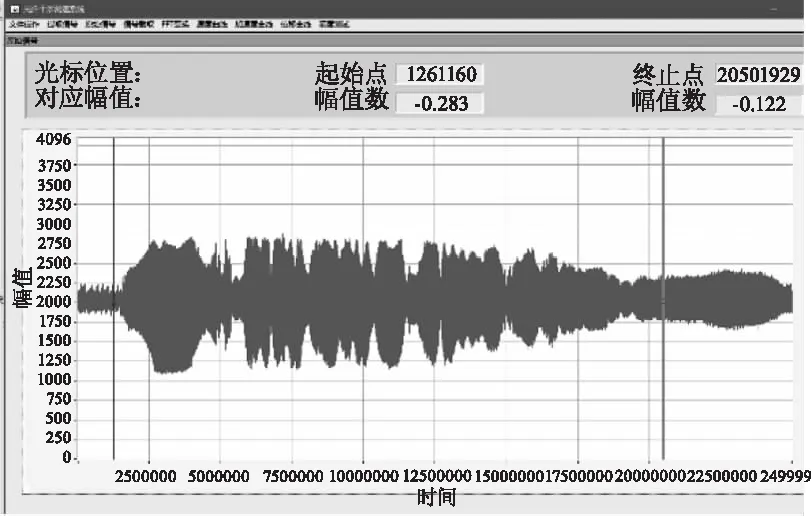
圖4 采集卡采集干涉信號(hào)
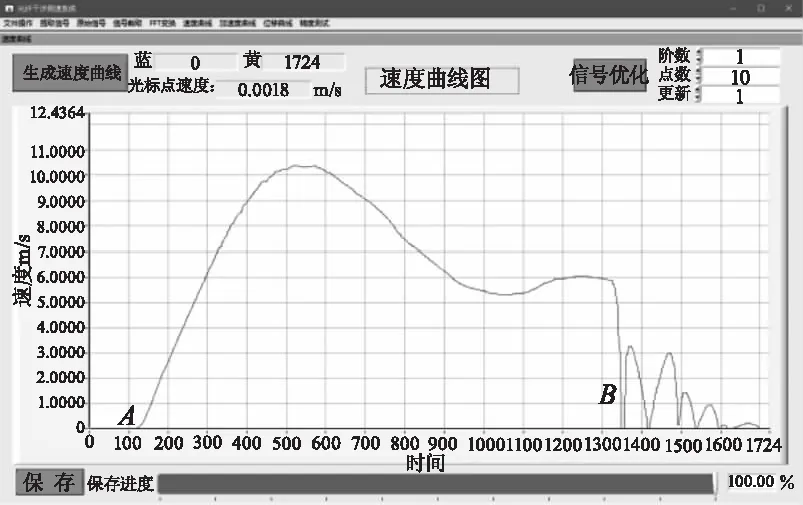
圖5 時(shí)間-速度曲線
其中橫坐標(biāo)為加窗變換得到的速度點(diǎn)數(shù)K,與時(shí)間換算關(guān)系為tK=MfsK。縱坐標(biāo)為速度,單位m/s。
由于空壓機(jī)氣體通過(guò)二位三通手動(dòng)氣動(dòng)開(kāi)關(guān)和無(wú)桿氣缸相連,在空壓機(jī)高壓氣體涌入無(wú)桿氣缸一端時(shí),滑塊運(yùn)動(dòng)狀態(tài)表現(xiàn)為自A點(diǎn)開(kāi)始速度急速上升,滑塊高速運(yùn)動(dòng)擠壓氣缸另一端的空氣,使滑塊運(yùn)動(dòng)速度在到達(dá)極大值后下降,又在高壓氣體推動(dòng)和另一端壓縮空氣排出氣缸雙重作用下出現(xiàn)速度緩慢上升態(tài)勢(shì),以撞擊氣缸另一端為標(biāo)志出現(xiàn)運(yùn)動(dòng)速度為零的B點(diǎn)。由于該P(yáng)DV結(jié)構(gòu)光路不具有判斷被測(cè)物運(yùn)動(dòng)方向功能,因此滑塊撞擊氣缸后的支架振動(dòng)直接表現(xiàn)為滑塊速度在大于0的范圍內(nèi)起伏,運(yùn)動(dòng)直至振動(dòng)消失,速度歸零。
該曲線時(shí)間分辨率T=Nfs=0.16 ms。根據(jù)FFT頻率分辨率定義和式(2)可得速度分辨率為:
(3)
根據(jù)上式可求出相應(yīng)的速度分辨率為0.370 mm/s。
對(duì)A點(diǎn)至B點(diǎn)速度積分得到位移曲線如圖6所示,最大位移為133.1522 cm。
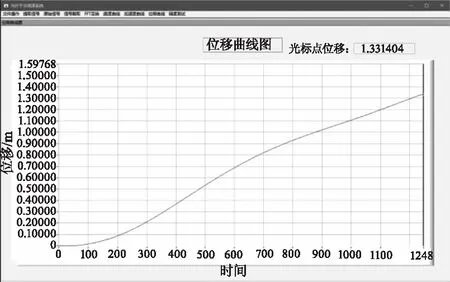
圖6 無(wú)桿氣缸滑塊位移曲線

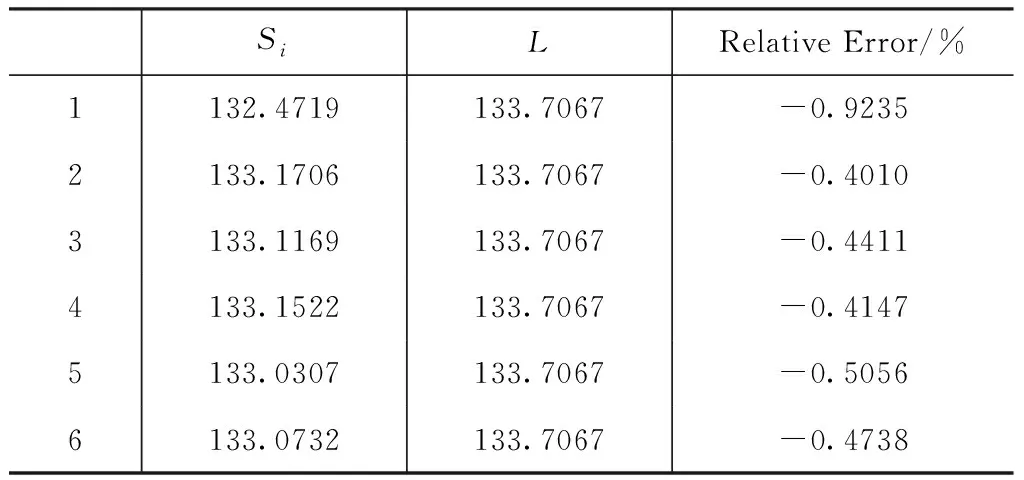
表1 位移測(cè)量結(jié)果
從實(shí)驗(yàn)結(jié)果來(lái)看PDV在1.33 m大景深條件下測(cè)量高速運(yùn)動(dòng)中的位移測(cè)量數(shù)據(jù)與直接測(cè)量結(jié)果符合性好,平均相對(duì)誤差為-0.5266 %,實(shí)驗(yàn)證明了該方案的可行性。
5 結(jié) 論
本文以300 mm工作距離非球面鏡為探頭,在60 mW小功率激光的條件下搭建PDV系統(tǒng),以無(wú)桿氣缸滑塊為速度源驗(yàn)證了PDV結(jié)構(gòu)在1.3 m景深動(dòng)態(tài)測(cè)量中應(yīng)用的可行性。實(shí)驗(yàn)恢復(fù)出了滑塊完整速度曲線,且對(duì)于加速度突變的反彈點(diǎn)運(yùn)動(dòng)狀態(tài)捕捉良好。實(shí)際在1.5 m處仍可以取得有效干涉信號(hào)。結(jié)果表明PDV結(jié)構(gòu)的健壯性良好,光學(xué)設(shè)計(jì)可靠,速度分辨率高,展現(xiàn)出PDV在工業(yè)控制、長(zhǎng)景深動(dòng)態(tài)測(cè)速領(lǐng)域,例如監(jiān)測(cè)槍械自動(dòng)機(jī)運(yùn)動(dòng)狀態(tài)以判斷槍械擊發(fā)是否到位、擊發(fā)慣性對(duì)于槍體影響,槍械擊發(fā)頻率測(cè)試等方面的應(yīng)用前景。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
