基于集員估計(jì)的衛(wèi)星飛輪故障檢測(cè)與預(yù)測(cè)方法
2022-04-26 02:14:22梁寒玉張文瀚王振華沈毅
航空學(xué)報(bào) 2022年3期
梁寒玉,張文瀚,王振華,*,沈毅
1.北京控制工程研究所,北京 100190 2.哈爾濱工業(yè)大學(xué) 航天學(xué)院,哈爾濱 150001
飛輪是衛(wèi)星姿態(tài)控制系統(tǒng)的關(guān)鍵執(zhí)行部件之一。雖然衛(wèi)星飛輪具有較高的設(shè)計(jì)可靠性,但是由于其長(zhǎng)期運(yùn)行在惡劣的空間環(huán)境中,故障是無(wú)法完全避免的。衛(wèi)星飛輪的故障可能會(huì)引起姿態(tài)控制性能下降,甚至?xí)绊懶l(wèi)星的正常運(yùn)行。因此,對(duì)飛輪的故障進(jìn)行及時(shí)有效的診斷和處理,對(duì)于衛(wèi)星的安全穩(wěn)定運(yùn)行具有重要意義。
航天器控制系統(tǒng)的故障診斷與容錯(cuò)控制技術(shù)得到了國(guó)內(nèi)外研究者的廣泛關(guān)注。在衛(wèi)星飛輪故障診斷方面,文獻(xiàn)[6]針對(duì)衛(wèi)星動(dòng)量輪閉環(huán)系統(tǒng)提出了一種基于未知輸入觀測(cè)器的飛輪故障隔離方法;文獻(xiàn)[7]提出了一種利用擴(kuò)展卡爾曼濾波技術(shù)的衛(wèi)星飛輪故障檢測(cè)方法;文獻(xiàn)[8]基于歷史觀測(cè)數(shù)據(jù)建立了飛輪的高斯混合模型,采用貝葉斯后驗(yàn)概率方法研究了衛(wèi)星飛輪的故障診斷方法;文獻(xiàn)[9]中提出了一種基于偏差分離原理和兩階段卡爾曼濾波的衛(wèi)星反作用飛輪故障診斷方法,并利用半實(shí)物仿真平臺(tái)進(jìn)行了驗(yàn)證;文獻(xiàn)[10]提出了一種基于兩階段擴(kuò)展卡爾曼濾波的衛(wèi)星飛輪故障估計(jì)方法。目前文獻(xiàn)中的大部分結(jié)果集中在衛(wèi)星飛輪的故障診斷方面,在衛(wèi)星飛輪故障預(yù)測(cè)方面的研究相對(duì)較少。文獻(xiàn)[11]針對(duì)衛(wèi)星姿態(tài)控制系統(tǒng)的故障預(yù)測(cè)問(wèn)題,提出了一種結(jié)合模糊基函數(shù)網(wǎng)絡(luò)與自回歸模型的故障預(yù)測(cè)方法,但是該方法需要使用大量衛(wèi)星正常運(yùn)行時(shí)的歷史數(shù)據(jù)來(lái)訓(xùn)練模糊基函數(shù)網(wǎng)絡(luò),在一定程度上限制了其實(shí)用性。文獻(xiàn)[12]基于衛(wèi)星姿態(tài)控制系統(tǒng)的可重構(gòu)性分析,利用Kaplan-Meier估計(jì)器和極大似然估計(jì)方法建立了系統(tǒng)故障的Petri網(wǎng)預(yù)測(cè)模型,并在此基礎(chǔ)上實(shí)現(xiàn)了對(duì)衛(wèi)星故障的預(yù)測(cè)和系統(tǒng)剩余使用壽命的估計(jì)。文獻(xiàn)[13]通過(guò)使用指數(shù)模型來(lái)描述衛(wèi)星反作用飛輪故障,提出了一種結(jié)合卡爾曼濾波和粒子濾波的飛輪故障預(yù)測(cè)方法,但是粒子退化現(xiàn)象會(huì)影響該方法的性能。
基于退化模型的故障預(yù)測(cè)方法的性能通常依賴(lài)于退化模型的精度。對(duì)于衛(wèi)星飛輪這樣的在軌運(yùn)行器件,通過(guò)地面試驗(yàn)的方式可以得到其退化模型的形式,但是很難準(zhǔn)確地確定出每個(gè)飛輪個(gè)體退化模型中的參數(shù)。因此,如何在軌估計(jì)出飛輪退化模型中的未知參數(shù),對(duì)于飛輪的故障預(yù)測(cè)是至關(guān)重要的。但是,在對(duì)飛輪退化模型中的參數(shù)進(jìn)行在軌估計(jì)時(shí),需要考慮模型或者測(cè)量偏差,這就需要研究魯棒估計(jì)方法。現(xiàn)有的魯棒估計(jì)方法,卡爾曼濾波和估計(jì)是最常用的2種方法。在卡爾曼濾波中,通常需要假設(shè)偏差的概率分布是已知的;在估計(jì)中,需要假設(shè)偏差的能量是有界的。但實(shí)際上,實(shí)際系統(tǒng)中的偏差通常是未知但有界的。集員估計(jì)方法可以處理未知但有界不確定性條件下的估計(jì)問(wèn)題,近年來(lái)得到了很多學(xué)者的重視,尤其是在故障診斷方面,集員估計(jì)技術(shù)得到了越來(lái)越多的應(yīng)用。與故障診斷相比,集員估計(jì)技術(shù)在故障預(yù)測(cè)方面缺乏相關(guān)研究。基于上述討論,本文提出了一種基于中心對(duì)稱(chēng)多面體的集員估計(jì)方法,可以實(shí)現(xiàn)對(duì)飛輪故障的檢測(cè)和預(yù)測(cè)。本文還利用數(shù)值仿真對(duì)提出的方法進(jìn)行了驗(yàn)證,仿真結(jié)果表明所提出的方法可以實(shí)現(xiàn)對(duì)飛輪故障的早期檢測(cè)和提前預(yù)警,具有較好的可靠性和有效性。
1 衛(wèi)星飛輪動(dòng)態(tài)模型
飛輪轉(zhuǎn)速精度是影響飛輪輸出力矩精度的主要因素,因而采用轉(zhuǎn)速反饋進(jìn)行速率控制是最直接有效的方法。根據(jù)相關(guān)文獻(xiàn)[22-23]和實(shí)際工程經(jīng)驗(yàn)可得到如圖1所示的飛輪閉環(huán)系統(tǒng)的方框圖。

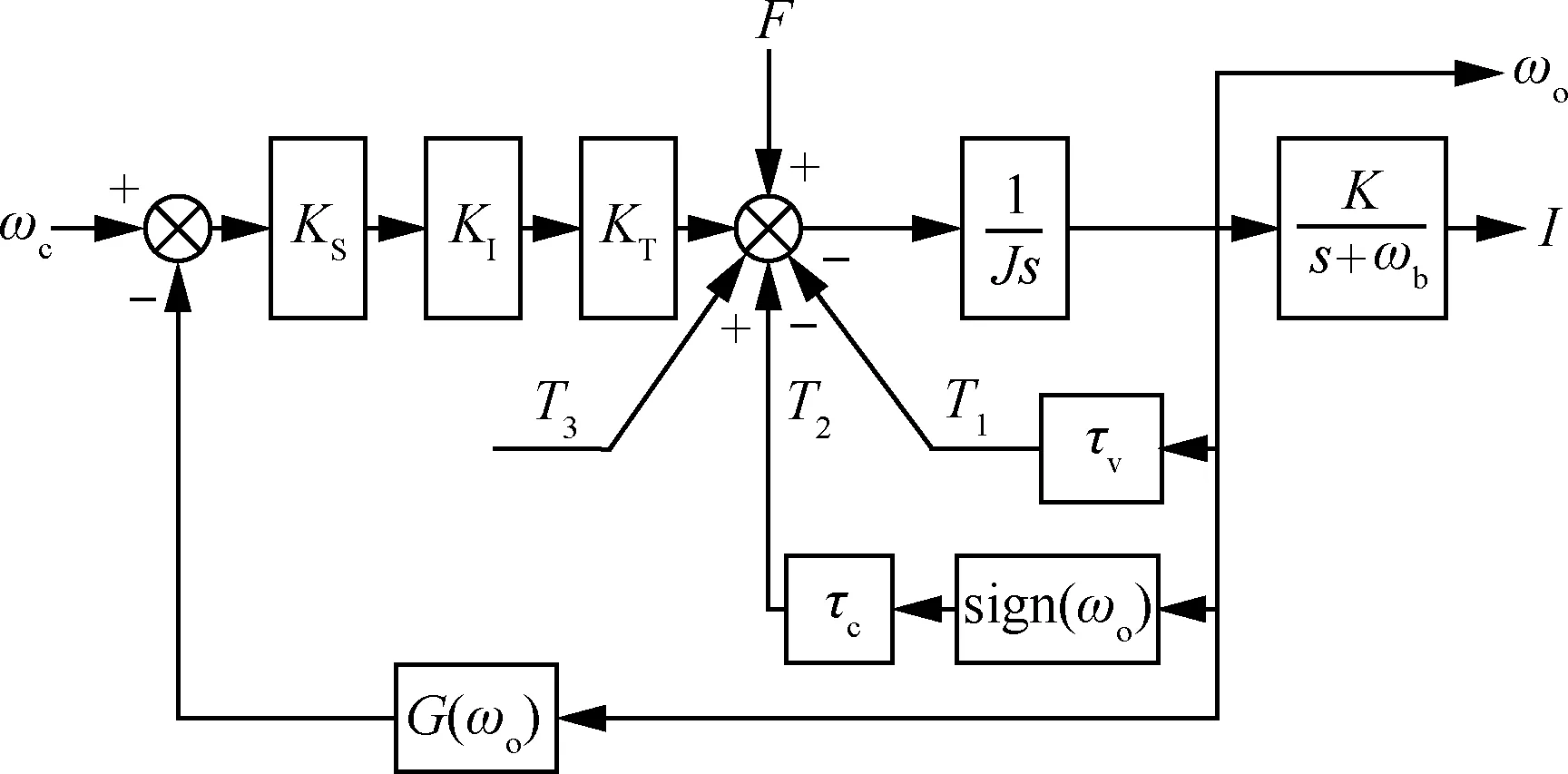
圖1 飛輪閉環(huán)系統(tǒng)方框圖Fig.1 Block diagram of flywheel closed-loop system
(1)

針對(duì)圖1中的飛輪閉環(huán)系統(tǒng),可得到如下形式的傳遞函數(shù):
(2)

(3)

(4)
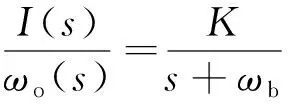
式中:=+sign()。式(2)為飛輪電機(jī)電流和實(shí)際輸出轉(zhuǎn)速之間的傳遞函數(shù);式(3)為飛輪模型只受力矩噪聲影響時(shí)的傳遞函數(shù);式(4)為飛輪模型只受轉(zhuǎn)速指令控制時(shí)的傳遞函數(shù)。根據(jù)式(2)~式(4),可得到如下的連續(xù)時(shí)間模型:

(5)

(6)

(7)

根據(jù)實(shí)際工程經(jīng)驗(yàn)可知,飛輪中的黏性摩擦系數(shù)、庫(kù)侖摩擦系數(shù)和力矩噪聲角偏差無(wú)法準(zhǔn)確確定,故和3,均為未知的。因此,將式(6)和式(7)中的未知項(xiàng)處理為不確定性干擾,具體形式為

(8)

(9)
式中:



然后,選擇采樣時(shí)間,則利用歐拉一步離散法則可將式(9)轉(zhuǎn)換為如下離散時(shí)間系統(tǒng):
(10)

本文的目的是利用飛輪閉環(huán)系統(tǒng)動(dòng)態(tài)模型設(shè)計(jì)一種故障預(yù)測(cè)方法,在飛輪故障造成重大影響前及時(shí)給出有效的預(yù)警信號(hào),保證飛輪系統(tǒng)的安全性。本文的故障預(yù)測(cè)方法主要針對(duì)的是性能已經(jīng)發(fā)生退化的飛輪對(duì)象,且是在性能退化被檢測(cè)到之后才開(kāi)始使用,并不直接應(yīng)用于無(wú)故障的飛輪對(duì)象中。因此,在飛輪應(yīng)用故障預(yù)測(cè)方法之前,需要先對(duì)其進(jìn)行故障檢測(cè),在檢測(cè)到飛輪性能故障后才開(kāi)始使用故障預(yù)測(cè)技術(shù)。
2 基于集員狀態(tài)估計(jì)的故障檢測(cè)方法
基于飛輪閉環(huán)系統(tǒng)動(dòng)態(tài)模型,本文提出了一種基于集員估計(jì)的故障檢測(cè)方法。首先,利用中心對(duì)稱(chēng)多面體的傳播與交集性質(zhì)來(lái)估計(jì)模型中的系統(tǒng)狀態(tài);然后,基于估計(jì)的系統(tǒng)狀態(tài)和實(shí)際輸出生成殘差,再結(jié)合閾值來(lái)實(shí)現(xiàn)飛輪故障檢測(cè)。
2.1 中心對(duì)稱(chēng)多面體的定義與性質(zhì)
在設(shè)計(jì)基于集員估計(jì)的故障檢測(cè)方法前,首先介紹一些關(guān)于中心對(duì)稱(chēng)多面體的定義和性質(zhì)。
一個(gè)維空間中的階中心對(duì)稱(chēng)多面體Z?(≤)是超立方體=[-1,1]的仿射變換,即
Z={∈:=+,∈}
(11)
式中:∈和∈×分別為中心對(duì)稱(chēng)多面體的中心和形狀矩陣。

(12)
式中:⊕表示閔可夫斯基和符號(hào)。
(13)
式中:∈×為給定的矩陣。
2.2 基于中心對(duì)稱(chēng)多面體的集員狀態(tài)估計(jì)


(14)





為了實(shí)現(xiàn)基于中心對(duì)稱(chēng)多面體的集員狀態(tài)估計(jì),本文提出如下的定理。


(15)

(16)

(17)

(18)

(19)




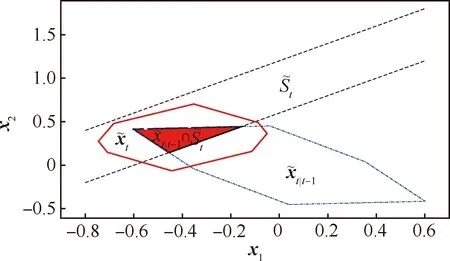
圖2 基于中心對(duì)稱(chēng)多面體的集員狀態(tài)估計(jì)Fig.2 Zonotope-based state set-membership estimation



根據(jù)性質(zhì)1和性質(zhì)2可以得到


則可得證等式(15)和式(16)。



則可得到如下等式:

(20)












(21)






(22)









基于定理1中的集員狀態(tài)估計(jì)算法,本文給出如下形式的殘差生成公式:
(23)





(24)
考慮到直接判斷殘差和中心對(duì)稱(chēng)多面體R的包含關(guān)系十分復(fù)雜,本文選擇先計(jì)算包含中心對(duì)稱(chēng)多面體R的區(qū)間盒子,然后判斷殘差是否被區(qū)間盒子包含來(lái)檢測(cè)故障。根據(jù)文獻(xiàn)[15],可以得到如下的中心對(duì)稱(chēng)多面體區(qū)間求取公式:

(25)

在得到中心對(duì)稱(chēng)多面體R的區(qū)間盒子后,可以得到如下的故障檢測(cè)邏輯:
(26)
為了保證檢測(cè)的可靠性,需要在某一時(shí)間段內(nèi)存在多個(gè)時(shí)刻的殘差超出R的區(qū)間盒子,才可以判定飛輪故障,此時(shí)切入故障預(yù)測(cè)模式;反之,則說(shuō)明飛輪工作正常。故障檢測(cè)中的時(shí)間段長(zhǎng)度和超出的時(shí)刻個(gè)數(shù)可依據(jù)實(shí)際工程經(jīng)驗(yàn)選取。
3 基于集員參數(shù)估計(jì)的故障預(yù)測(cè)方法
在利用第2節(jié)中的方法檢測(cè)出飛輪出現(xiàn)了故障且性能正在退化后,本節(jié)提出了一種故障預(yù)測(cè)方法,在飛輪故障造成重大影響前及時(shí)給出有效的預(yù)警信號(hào),保證飛輪系統(tǒng)的安全性和可靠性。
3.1 飛輪電流退化模型構(gòu)建
根據(jù)地面仿真和歷史數(shù)據(jù)分析可知,飛輪電流的大小可以作為反映其健康狀態(tài)的重要指標(biāo)。所以本文采用飛輪的電流作為故障特征信號(hào)并由此來(lái)實(shí)現(xiàn)對(duì)飛輪的故障預(yù)測(cè)和預(yù)警。在飛輪故障預(yù)測(cè)方法中,考慮到飛輪瞬時(shí)電流數(shù)據(jù)的參考價(jià)值有限,本文采取衛(wèi)星與運(yùn)行周期相關(guān)的一段時(shí)間內(nèi)的電流均值作為特征參數(shù):
(27)
式中:為當(dāng)前的特征信號(hào);為第個(gè)時(shí)刻的電流大小;為計(jì)算特征信號(hào)所用的時(shí)間長(zhǎng)度。
雖然可以作為反映飛輪性能的征兆信號(hào),但是由于存在測(cè)量噪聲等不確定性,會(huì)導(dǎo)致與真實(shí)的健康指標(biāo)有一定的偏差,即
=+
(28)
式中:為準(zhǔn)確反映飛輪性能退化的參數(shù);為實(shí)測(cè)值和準(zhǔn)確值之間的偏差。
如果能夠準(zhǔn)確地描述特征參數(shù)的演化規(guī)律,則可對(duì)其未來(lái)的趨勢(shì)進(jìn)行預(yù)測(cè),結(jié)合一定的閾值即可實(shí)現(xiàn)對(duì)飛輪故障的提前預(yù)警。結(jié)合地面測(cè)試和試驗(yàn)經(jīng)驗(yàn),可采用如下4種線(xiàn)性或非線(xiàn)性退化模型來(lái)描述的演化規(guī)律:
=+
(29)
=exp(+)
(30)
=exp(-)
(31)

(32)
式中:和為退化模型中的未知參數(shù)。
雖然可以通過(guò)地面測(cè)試與試驗(yàn)確定出與衛(wèi)星飛輪電流數(shù)據(jù)相關(guān)的退化模型的形式,但是,考慮到飛輪的個(gè)體差異和實(shí)際運(yùn)行情況,模型中的參數(shù)和的值是無(wú)法事先確定的。這就需要根據(jù)的值,結(jié)合式(29)~式(32)中的模型,對(duì)和的值進(jìn)行在軌估計(jì)。在得到參數(shù)和的估計(jì)值后,再采用式(29)~式(32)中的退化模型對(duì)將來(lái)時(shí)刻的飛輪健康狀況進(jìn)行預(yù)測(cè)。
上述4種模型中,式(29)中線(xiàn)性模型的參數(shù)估計(jì)較為方便,但式(30)~式(32)中的非線(xiàn)性模型則會(huì)為參數(shù)估計(jì)帶來(lái)不便,為此需要對(duì)其進(jìn)行線(xiàn)性化處理。下面介紹模型2到4的處理方法。
對(duì)式(30)兩邊同時(shí)取對(duì)數(shù)可得
ln()=+
(33)
對(duì)式(31)兩邊同時(shí)取對(duì)數(shù)可得
ln()=-
(34)
對(duì)式(32)兩邊同時(shí)取對(duì)數(shù)可得
ln()=ln()+ln()
(35)
對(duì)于式(28)中的偏差,模型2到4在兩邊取對(duì)數(shù)后均可將其處理為
ln()=ln(+)=ln()+
(36)
式中:表示ln()和ln()之間的偏差。
從式(28)、式(29)和式(33)~式(35)可以看出,經(jīng)過(guò)上述取對(duì)數(shù)處理后,4種退化模型具有如下相同形式的線(xiàn)性動(dòng)態(tài)方程:
=++
(37)
式中:式(37)中各參數(shù)的具體形式與模型類(lèi)型相關(guān),參數(shù)選取方式為
=,=,=,=
=ln(),=,=,==-,=ln(),=
=,=
=ln(),=,=ln()=ln()
基于飛輪電流特征數(shù)據(jù)和4種退化模型統(tǒng)一后的動(dòng)態(tài)方程,本文提出了一種基于集員參數(shù)估計(jì)的故障預(yù)測(cè)方法。首先,利用中心對(duì)稱(chēng)多面體的傳播與交集性質(zhì)來(lái)估計(jì)模型中的未知參數(shù),然后基于估計(jì)的參數(shù)來(lái)對(duì)飛輪電流數(shù)據(jù)進(jìn)行預(yù)測(cè),再結(jié)合預(yù)測(cè)值和閾值來(lái)實(shí)現(xiàn)飛輪故障預(yù)警。
3.2 基于中心對(duì)稱(chēng)多面體的集員參數(shù)估計(jì)
雖然前述內(nèi)容確定出了飛輪4種退化模型統(tǒng)一后的動(dòng)態(tài)方程,但是其模型參數(shù)和是未知的,故為了實(shí)現(xiàn)對(duì)飛輪電流值的預(yù)測(cè),需先對(duì)模型參數(shù)和進(jìn)行估計(jì)進(jìn)而得到飛輪電流的預(yù)測(cè)值。考慮到在飛輪電流的演變過(guò)程中,模型參數(shù)和的變化是十分緩慢的,故可以采用如下的模型描述參數(shù)和的變化過(guò)程:
(38)
式中:1,和2,為模型參數(shù)和變化過(guò)程受到的擾動(dòng);1,和2,通常是未知但有界的。
基于飛輪退化模型統(tǒng)一后的動(dòng)態(tài)方程(37)和參數(shù)變化過(guò)程(38)則可得如下的估計(jì)問(wèn)題:
(39)

(40)
式中:為每種退化模型下各自實(shí)測(cè)值和準(zhǔn)確值之間的偏差,且是未知但有界的。由此,本文建立了飛輪退化模型參數(shù)的估計(jì)問(wèn)題。
雖然無(wú)法確定出參數(shù)和的值,但通過(guò)地面測(cè)試與試驗(yàn)可估計(jì)出系統(tǒng)(40)狀態(tài)初值、擾動(dòng)和噪聲的上下邊界。由此可得到如下的未知但有界條件:

(41)

根據(jù)定義1,可將未知有界(41)假設(shè)轉(zhuǎn)換為如下的中心對(duì)稱(chēng)多面體形式:

為了實(shí)現(xiàn)基于中心對(duì)稱(chēng)多面體的集員參數(shù)估計(jì),本文提出如下的定理。

|-1=[-1]
(42)

(43)

(44)

(45)

定理2的證明過(guò)程同定理1,此處不再重復(fù)證明。同時(shí),注1中的降階方法在定理2中同樣適用,有助于降低集員參數(shù)估計(jì)的計(jì)算量。
3.3 飛輪故障預(yù)測(cè)策略
本節(jié)將對(duì)飛輪未來(lái)時(shí)刻的電流數(shù)據(jù)進(jìn)行預(yù)測(cè),再結(jié)合預(yù)測(cè)值和設(shè)置的閾值來(lái)實(shí)現(xiàn)飛輪故障預(yù)警。假設(shè)現(xiàn)在共有+1個(gè)飛輪電流特征數(shù)據(jù),期望每個(gè)時(shí)刻往后預(yù)測(cè)的電流特征個(gè)數(shù)為。

當(dāng)采用式(29)中的退化模型1時(shí),采用式(46)來(lái)對(duì)未來(lái)時(shí)刻的飛輪電流值進(jìn)行預(yù)測(cè):

(46)

當(dāng)采用式(30)中的退化模型2時(shí),則采用式(47) 來(lái)對(duì)未來(lái)時(shí)刻的飛輪電流值進(jìn)行預(yù)測(cè)

(47)
當(dāng)采用式(31)中的退化模型3時(shí),則采用式(48) 來(lái)對(duì)未來(lái)時(shí)刻的飛輪電流值進(jìn)行預(yù)測(cè):

(48)
當(dāng)采用式(32)中的退化模型4時(shí),則采用式(49) 來(lái)對(duì)未來(lái)時(shí)刻的飛輪電流值進(jìn)行預(yù)測(cè):

(49)

1) 若對(duì)從1取到,都使得式(50)成立
(50)
則說(shuō)明在時(shí)刻未預(yù)測(cè)到故障。
2) 若對(duì)從1取到,存在一個(gè)使得
(51)
則說(shuō)明在時(shí)刻預(yù)測(cè)到了故障,預(yù)測(cè)的未來(lái)發(fā)生故障的時(shí)刻為+。
4 仿真結(jié)果
本節(jié)基于圖1中的飛輪模型,利用數(shù)值仿真來(lái)驗(yàn)證本文方法的有效性,再將所提出的方法和兩種現(xiàn)有的故障預(yù)測(cè)技術(shù)進(jìn)行了對(duì)比,進(jìn)一步驗(yàn)證了所提方法的優(yōu)越性。仿真中,飛輪模型的各參數(shù)設(shè)置為:=2.5,=4,=0.095 N·m/A,=0.031 N·m·s,∈0.001×[-1,1] N·m,∈0.002×[-1,1] N·m,∈0.02×[-1,1] rad,=0.2 rad/s,=16 A·rad/V·s,=40 rad/s,=0.05 s,由此可以確定如下的離散時(shí)間系統(tǒng)(10)中的參數(shù)矩陣:


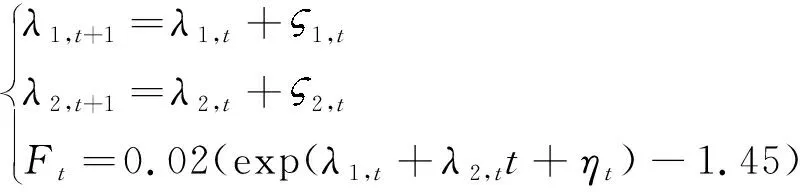


故障預(yù)測(cè)過(guò)程中,考慮到飛輪瞬時(shí)電流數(shù)據(jù)的參考價(jià)值有限,本文采取與運(yùn)行周期相關(guān)的一段時(shí)間內(nèi)的電流均值作為特征參數(shù),通過(guò)對(duì)飛輪的電機(jī)電流數(shù)據(jù)進(jìn)行式(27)中的處理可以得到如圖5所示的模擬飛輪故障電流特征數(shù)據(jù)。
故障預(yù)測(cè)仿真中,采用退化模型1來(lái)描述電流特征數(shù)據(jù)的演化規(guī)律,具體仿真參數(shù)設(shè)置為

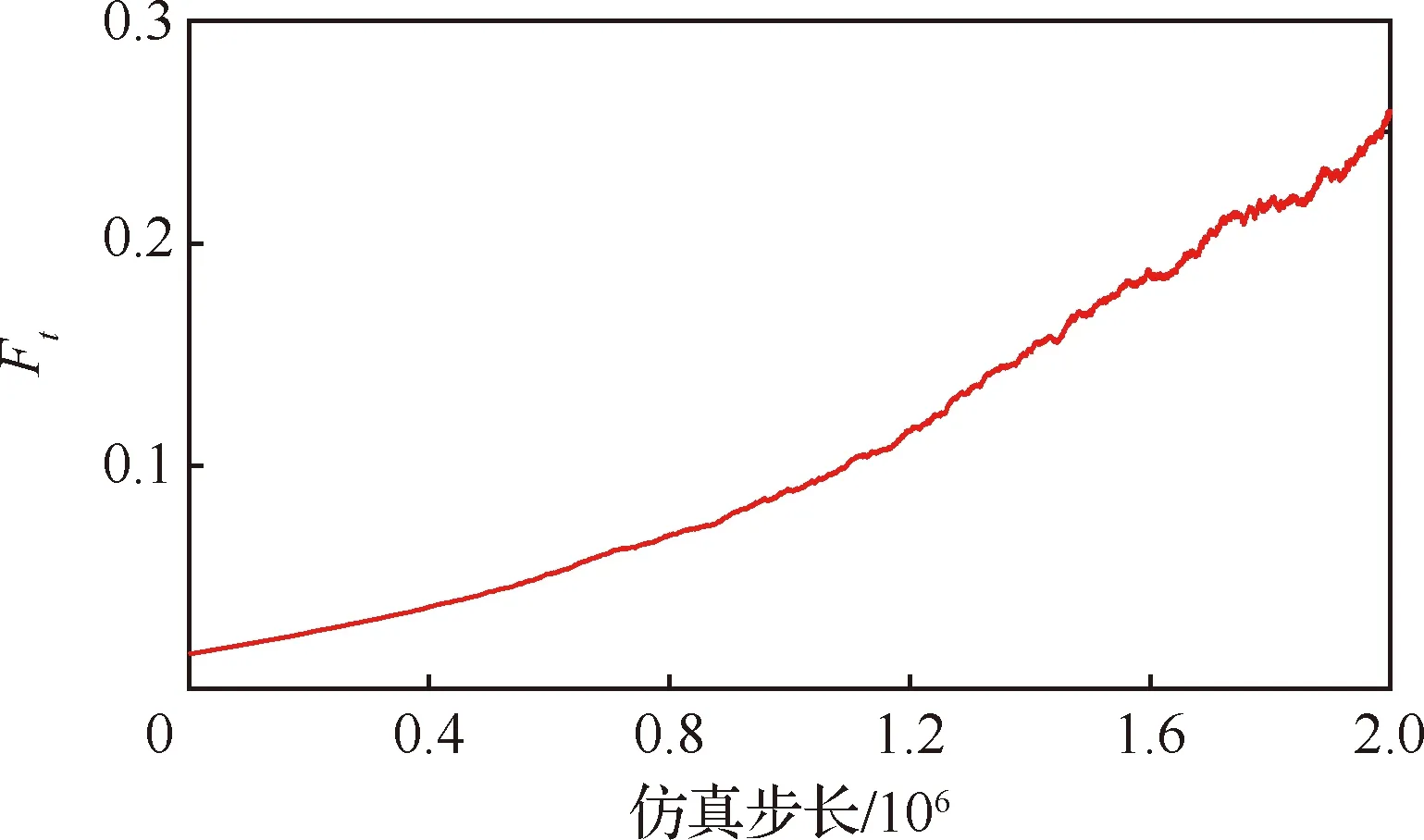
圖3 飛輪故障數(shù)據(jù)Fig.3 Fault data of flywheel
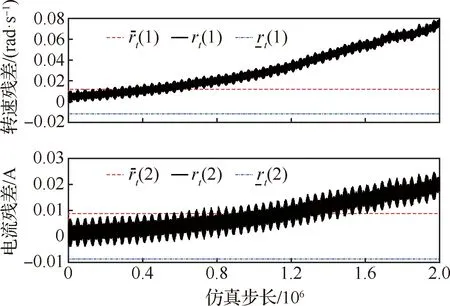
圖4 飛輪故障檢測(cè)結(jié)果Fig.4 Flywheel fault detection results
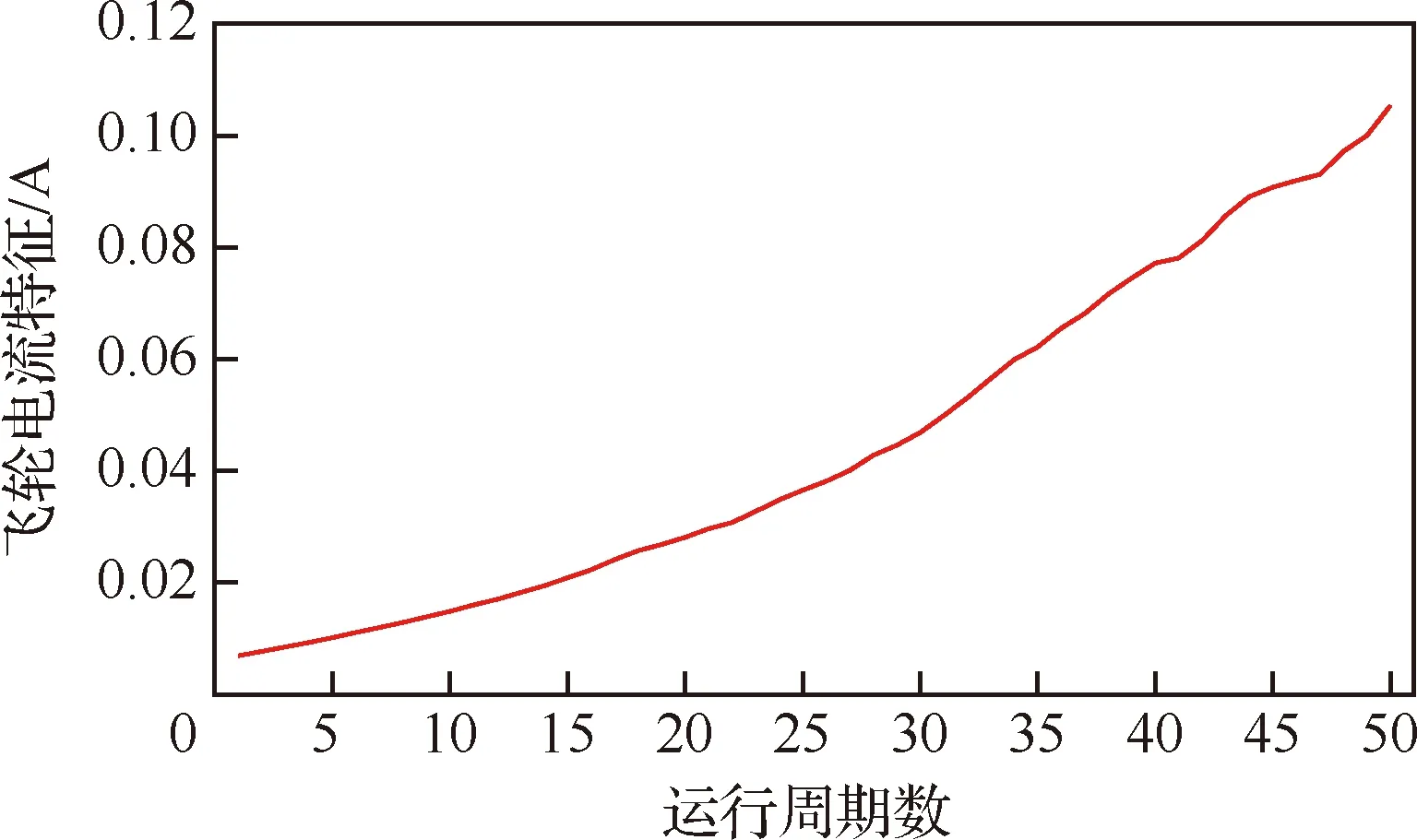
圖5 飛輪電流特征數(shù)據(jù)Fig.5 Flywheel current characteristic data
為了驗(yàn)證方法的優(yōu)越性,將所提出的方法與Predictive Maintenance Toolbox (PMT) 中的故障預(yù)測(cè)方法和基于灰色模型的預(yù)測(cè)方法進(jìn)行對(duì)比。采用與上述相同的仿真參數(shù),由此可得到如圖7所示的故障預(yù)測(cè)對(duì)比仿真結(jié)果。
從圖7中的結(jié)果可以看出,在=19,=27和=34時(shí),本文方法給出的電流預(yù)測(cè)結(jié)果更接近于實(shí)際的電流特征數(shù)據(jù)信號(hào),這表明本文方法能給出比灰色模型預(yù)測(cè)方法和PMT故障預(yù)測(cè)方法更準(zhǔn)確的故障預(yù)測(cè)結(jié)果。
為了更清楚的說(shuō)明本文方法給出的預(yù)測(cè)結(jié)果比基于灰色模型的預(yù)測(cè)方法和PMT中故障預(yù)測(cè)方法給出的結(jié)果更接近于實(shí)際電流特征信號(hào),本文還給出了3種方法在=19,=27和=34時(shí)的預(yù)測(cè)誤差對(duì)比結(jié)果。仿真中采用預(yù)測(cè)誤差之和來(lái)進(jìn)行對(duì)比,計(jì)算公式為


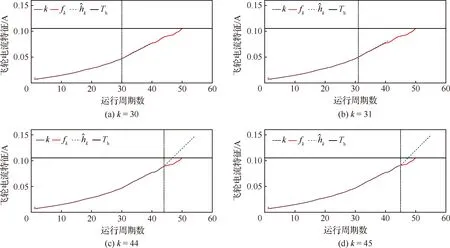
圖6 電流數(shù)據(jù)的故障預(yù)測(cè)結(jié)果Fig.6 Fault prognosis results of current data
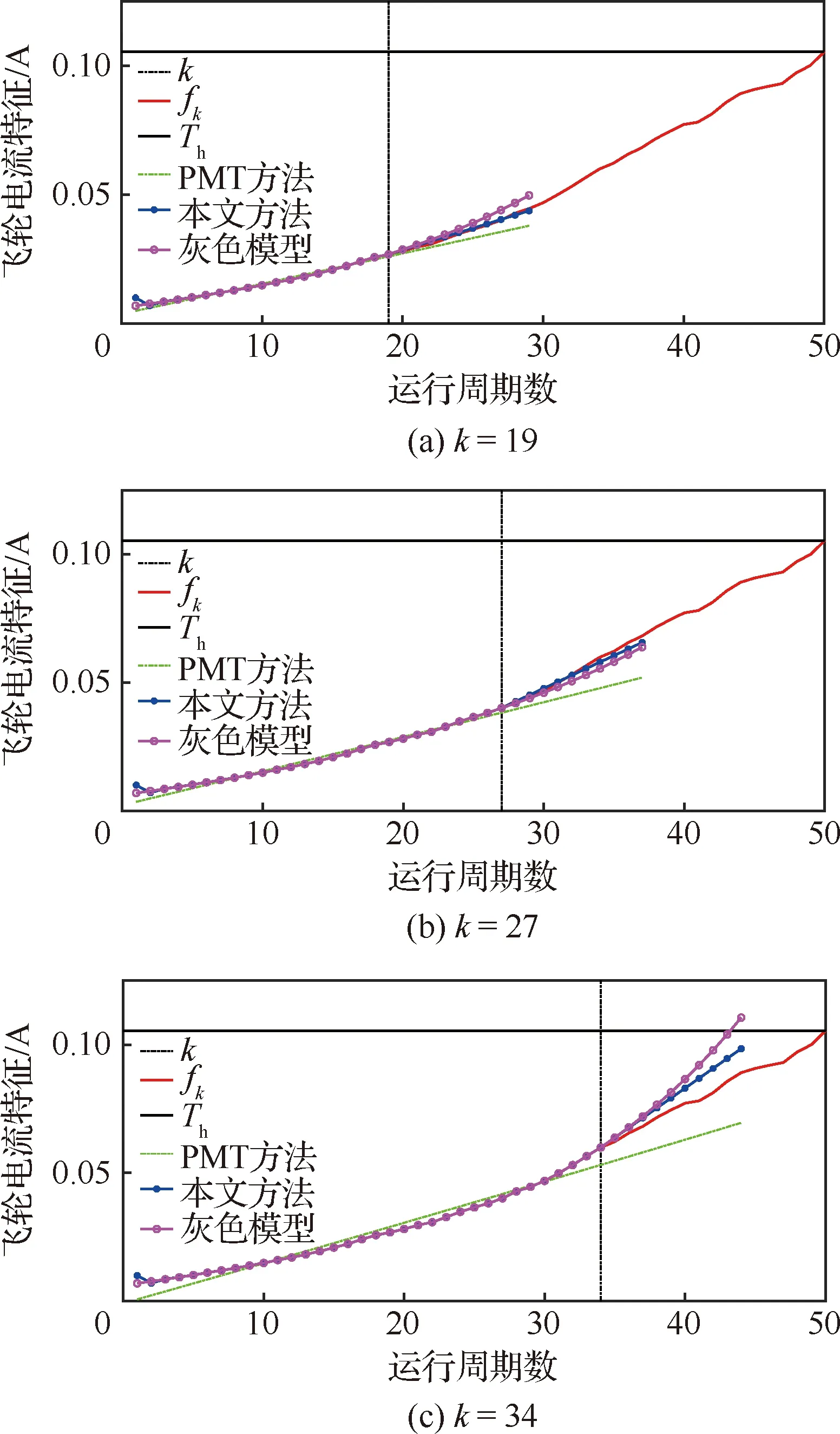
圖7 故障預(yù)測(cè)性能對(duì)比結(jié)果Fig.7 Comparison results of fault prognosis performance
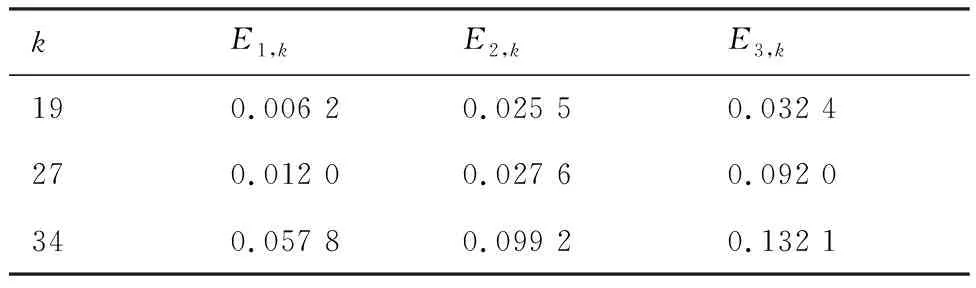
表1 故障預(yù)測(cè)誤差對(duì)比結(jié)果Table 1 Comparison results of fault prognosis errors
5 結(jié) 論
本文提出了一種基于集員估計(jì)的衛(wèi)星飛輪故障檢測(cè)和預(yù)測(cè)方法。
1) 根據(jù)飛輪的動(dòng)態(tài)特性和實(shí)際工程經(jīng)驗(yàn),構(gòu)建了飛輪閉環(huán)系統(tǒng)的動(dòng)態(tài)模型,并在此基礎(chǔ)上設(shè)計(jì)了基于集員估計(jì)的故障檢測(cè)方法。仿真結(jié)果表明,所設(shè)計(jì)的方法可以準(zhǔn)確有效的檢測(cè)出飛輪故障,檢測(cè)性能良好。
2) 選用飛輪電流作為故障特征信號(hào),構(gòu)建了電流退化模型,并在此基礎(chǔ)上設(shè)計(jì)了基于集員估計(jì)的故障預(yù)測(cè)方法。仿真結(jié)果表明,所設(shè)計(jì)的方法可以在故障特征信號(hào)超出閾值前給出預(yù)警信號(hào),預(yù)警性能可靠。
3) 與現(xiàn)有的Predictive Maintenance Toolbox中的故障預(yù)測(cè)方法和灰色模型的預(yù)測(cè)方法相比,本文方法的預(yù)測(cè)結(jié)果更接近于實(shí)際信號(hào),預(yù)測(cè)性能更好,體現(xiàn)了所設(shè)計(jì)方法的優(yōu)越性。
猜你喜歡
童話(huà)王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
汽車(chē)維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
汽車(chē)維護(hù)與修理(2016年10期)2016-07-10 08:17:41
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
汽車(chē)維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
