操縱性約束下的無人艇區域覆蓋路徑規劃
2022-04-26 09:09:30戚戰鋒
數字海洋與水下攻防 2022年2期
王 卓,曹 璐,戚戰鋒
(中國船舶集團有限公司第七一〇研究所,湖北 宜昌 443003)
0 引言
隨著對水域開發需求的提高,無人艇被廣泛應用在水面搜尋及水底地形測繪等應用場景。區域覆蓋研究是無人艇應用的一個重要研究方向:一方面需要滿足較高的區域覆蓋率,另一方面需要滿足無人艇的操縱性[1]。區域覆蓋研究可分為離線算法與啟發式算法[2],其中離線算法包括平行線掃描算法[3](或牛耕法),內螺旋線算法等。基于平行線掃描算法的區域覆蓋路徑規劃稱為平行線掃描路徑規劃,因其路徑簡單、轉彎較少,在無人系統區域覆蓋任務中被廣泛采用[4]。
萬等人[5]根據無人機最小轉彎半徑,提出無人機區域覆蓋中的轉彎路徑規劃方法,縮短轉彎路徑的距離。Berger等人[6]根據傳感器掃視寬度與邊界關系,提出無人機平行線掃描路徑規劃中轉彎航點的確定方法。Coombes等人[7]利用直線與圓弧設計無人機轉彎路徑,減少轉彎過程中的時間消耗。Broderick等人[8]利用平行線掃描路徑規劃完成有障礙物區域完全覆蓋,設計無人車轉彎路徑,使能量消耗最小。上述無人系統為減少平行線掃描路徑規劃轉彎部分的距離與時間消耗,考慮轉彎半徑與傳感器掃視寬度的影響,優化了直角轉彎路徑。
Du等人[9]考慮無人艇艏向角連續,利用有限種類圓弧,完成無人艇兩點之間的路徑規劃。Kratzke等人[10]建立海上搜救路徑規劃系統,通過平行線掃描路徑規劃,完成海上區域搜尋任務。Manda等人[11]提出了一種深度自適應水文測繪方法,利用平行線掃描路徑規劃,調整轉彎路徑點供無人艇調整艏向,完全覆蓋測繪區域。苗等人[12]利用無人艇遍歷海灣,通過平行線掃描路徑規劃完成覆蓋。Espensen等人[13]利用無人艇掃描海床,通過平行線掃描路徑規劃完全覆蓋。
相比無人機與無人車平行線掃描研究,無人艇平行線掃描路徑規劃更關注區域覆蓋率,尚未有同時考慮無人艇艏向角連續和掃海寬度[14]與回轉直徑大小關系的報道。作為欠驅動移動機器人,無人艇跟隨階梯變化的期望艏向角時,無人艇路徑跟蹤誤差大。然而,無人艇航行距離有限,當路徑跟蹤誤差增大后,無人艇航程增長,無人艇回轉過程中的額外能耗增多,這將降低區域覆蓋任務完成效率,甚至導致區域覆蓋任務失敗。
本文針對上述問題,以無人艇操縱性為約束,提出無人艇平行線掃描改進方法,并通過仿真驗證了該方法相比平行線掃描經典方法的優越性。可實現任意無人艇回轉直徑完成區域覆蓋,且可根據不同探測設備對應的掃海寬度調整區域覆蓋轉彎路徑。
1 問題描述
平行線掃描路徑規劃是區域探測、海上搜救、區域海洋環境監測等應用所采取的典型路徑規劃策略,通常以矩形區域作為搜尋區域[15]。該方法為:首先,遍歷搜尋區域的邊長信息,以最大寬度對應邊作為無人艇航行的主方向,保證無人艇往復搜尋回轉次數最少[16];其次,根據最大寬度與掃海寬度,確定平行線數量;最后,在搜尋區域內,確定距離邊界為單位掃海寬度的平行線的首尾端點,用線段以此串聯平行線段的首尾端點,完成全覆蓋的區域路徑規劃。
如圖1所示,以無人艇一次回轉過程為例,其路徑可拆分為平行線段(SA,BG)與回轉段(AB),路徑期望艏向角呈階梯式變化(90°→0°→-90°)。

圖 1 路徑規劃回轉過程期望艏向角變化Fig.1 Desired heading angle curve during turning in path planning
以常規欠驅動無人艇為例,受操縱性限制,無人艇難以實現直角回轉,而是以某一回轉直徑作圓弧運動,且艏向角連續變化。一方面,無人艇艏向角難以跟隨階梯變化的期望艏向角,從而無法有效跟蹤回轉段路徑,也就無法達到預期的區域覆蓋效果;另一方面,需考慮掃海寬度的影響,回轉段路徑因掃海寬度與回轉直徑大小關系而有半圓形、半跑道形和多段圓弧等不同形式。
為了解決路徑期望艏向角不連續和考慮掃海寬度與回轉直徑大小關系的路徑規劃問題,以無人艇操縱性作為約束,提出無人艇平行線掃描改進方法。首先,根據掃海寬度與無人艇回轉直徑大小關系,結合無人艇操縱性約束,著重對回轉段進行運動分析與規劃。然后,對整個矩形區域進行路徑規劃,實現區域覆蓋。
2 回轉段運動分析
本研究中,傳感器檢測單元中心位于無人艇重心,其可探測區域為以無人艇重心為圓心,掃海寬度為半徑的圓形區域。基于此特征,研究無人艇回轉階段的路徑規劃。
另,無人艇運動為“空氣–水”二相流運動,運動情況復雜,為簡化問題,作如下假設:
假設1:不考慮風浪流干擾。
假設2:保持無人艇在航行過程中速度恒定。
在平行線掃描路徑規劃中,相鄰平行線之間的距離,稱為搜尋間距,為減少區域覆蓋重復率,取搜尋間距等于掃海寬度。故,無人艇回轉段路徑規劃可分為掃海寬度等于、大于和小于無人艇回轉直徑3種情形,如圖2所示。圖2中:d為無人艇最小定常回轉直徑,w為搜尋間距,s為掃海寬度,O1和O2是無人艇定常回轉圈的圓心,S、G分別為路徑起點與終點,A、B分別為回轉段開始點與結束點,C、D、E均為無人艇回轉圈上的點。
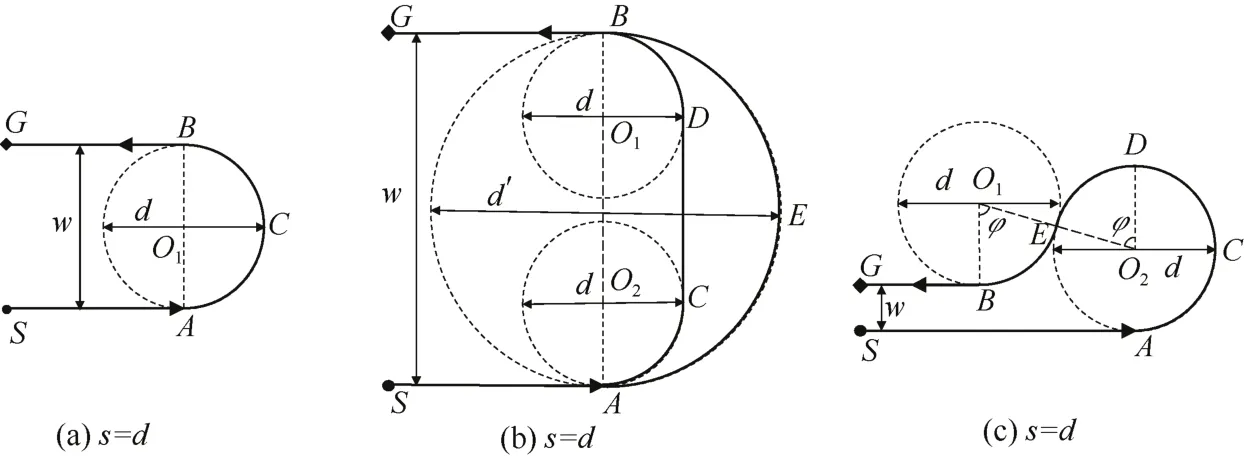
圖 2 掃海寬度與最小回轉直徑的大小關系Fig.2 Size relation between scanning width and minimum turning diameter
假設無人艇初始時刻向正東方向航行,艏向角為90°,逆時針回轉,則圖2中3種情形的期望艏向角變化如圖3所示。

圖 3 回轉過程期望艏向角變化Fig.3 Desired heading angle curve during turning
當s=d時,如圖2(a),以d為直徑的半圓作為無人艇回轉段的路徑,其期望艏向角以固定斜率從 90°變化至–90°,如圖 3(a)所示。
當s>d時,如圖2(b),無人艇從A點運動至B點,可分 2種規劃路徑:一種是以變化舵角沿ACDB運動;另一種是以固定舵角沿AEB運動,這2種路徑均能滿足無人艇艏向角連續。
對比ACDB與AEB這2種路徑的航程:

所以,從航程角度看,路徑ACDB比AEB更優,期望艏向角變化情況如圖3(b)所示。
當s<d時,如圖2(c),先以d為直徑作圓心角為π+φ的圓弧,再作圓弧末端點與平行線的相切圓,從而保證無人艇艏向角連續,如圖 3(c)所示。由幾何關系得:

3 平行線掃描路徑規劃
以長為a,寬為b的矩形區域(a>b)作為搜尋區域,根據第2節回轉段運動分析,回轉段探測區域與邊界相切,平行線掃描路徑規劃可分為3種情形:1)s=d;2)s>d;3)s<d。
在平行線掃描路徑規劃中,存在未覆蓋區域,通過計算未覆蓋區域面積,可得區域覆蓋率F:

為合理對比不同區域覆蓋方法達到的區域覆蓋率,本文定義單位航程區域覆蓋率,區域覆蓋率F與無人艇在搜尋區域中的航程L的比值,表示無人艇在單位航程中所能達到的區域覆蓋效果,數值越大意味著無人艇航行相同航程所能覆蓋的區域越多。定義式為

3.1 掃海寬度等于回轉直徑
當s=d時,改進方法路徑如圖4(a)所示。
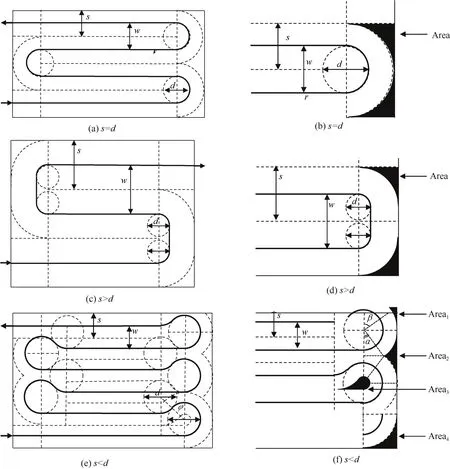
圖 4 平行線掃描改進方法路徑Fig.4 Improved path planning of parallel line-scanning
根據幾何關系,可得s=d情形區域覆蓋任務理論航程
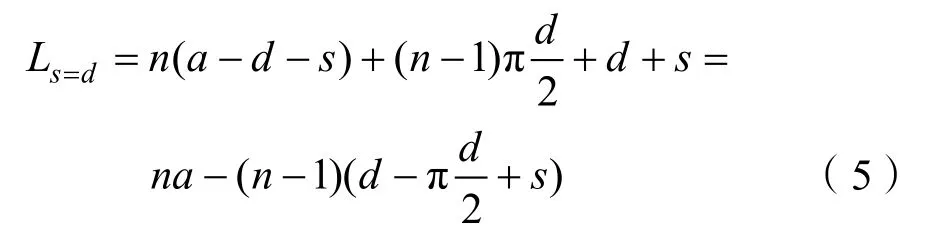
式中:n為平行線的數量,其值等于矩形區域寬度除以掃海寬度,若有小數,采用進一法取值。
如圖4(b)所示,該情形一次回轉未覆蓋區域

那么,針對s=d情形的總未覆蓋面積為(n- 1)Area。
3.2 掃海寬度大于回轉直徑
當s>d時,改進方法路徑如圖4(c)所示。
根據幾何關系,可得s>d情形區域覆蓋任務理論航程
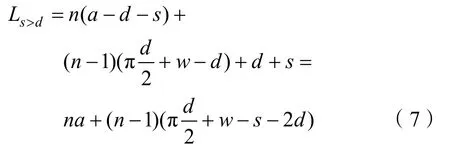
又因s=w,所以

如圖 4(d)所示,該情形一次回轉未覆蓋區域Area為

那么,針對s>d情形的總未覆蓋面積為(n- 1)Area。
3.3 掃海寬度小于回轉直徑
當s<d時,改進方法路徑如圖4(e)所示。
根據幾何關系,可得s<d情形區域覆蓋任務理論航程
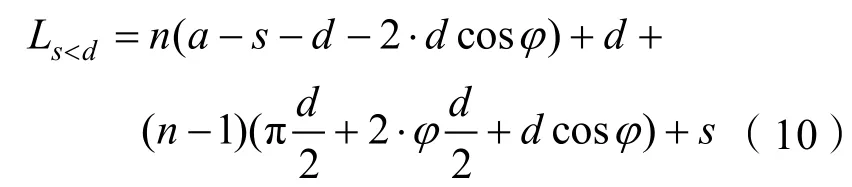
如圖4(f)所示,該情形存在4種形式未覆蓋區域,其值分別為
那么,針對s<d情形的總未覆蓋面積為

4 結果與討論
在地圖中劃定長50 m,寬24 m的矩形區域,根據平行線掃描改進方法生成路徑。設置巡航速度為1 m/s,無人艇在1 m/s初速時最小定常回轉直徑為4 m,3組掃海寬度分別為3 m、4 m、6 m。采用L1制導律[17]和串級PID底層控制實現路徑跟蹤,開展仿真試驗。
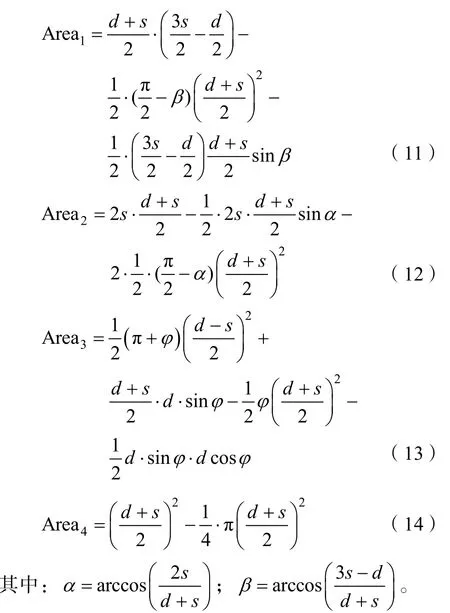
區域覆蓋任務中,無人艇仿真軌跡與未覆蓋區域如圖5所示。計算無人艇單位航程區域覆蓋率理論值η理論與仿真值η仿真,如表1所示。
圖 5 無人艇仿真軌跡及未覆蓋區域Fig.5 USV’s simulation trajectory and uncovered area

表 1 無人艇單位航程區域覆蓋率Table 1 Area coverage efficiency of USV per voyage%/m
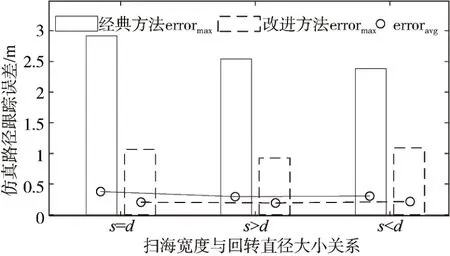
表 1的3種情形中,經典方法η理論與η仿真均小于改進方法。η理論后者較前者提高了0.002 4(s=d),0.004 3(s>d),0.009 3(s 為研究改進方法生成路徑對無人艇艏向角跟隨效果的影響,繪制無人艇回轉段艏向角變化與軌跡,如圖6所示。 圖 6 無人艇回轉階段仿真艏向角變化Fig.6 USV’s heading angle curve during turning period of simulation 圖6中3種情形,經典方法生成路徑,期望艏向角階梯變化,無人艇艏向角難以有效跟隨;區域覆蓋改進方法生成路徑,期望艏向角連續變化,無人艇艏向角隨路徑期望艏向角連續變化。如圖6(f)所示,仿真s<d情形,無人艇回轉段結束時艏向角變化存在滯后。結合圖2(c),因為無人艇在E點,要求舵角瞬時從左滿舵轉向右滿舵,舵效作用需要一段時間,所以無人艇跟蹤路徑時存在艏向角變化滯后情況。 此外,研究改進方法生成路徑對無人艇路徑跟蹤效果的影響,繪制無人艇回轉段路徑跟蹤誤差最大值errormax柱狀圖,并標記平均值erroravg,如圖7所示。 圖 7 無人艇仿真路徑跟蹤誤差Fig.7 Tracking error of USV’s simulation path 圖7中3種情形,經典方法errormax與erroravg均大于改進方法。因為改進方法考慮了無人艇艏向角連續性與回轉直徑影響,而無人艇在航行過程中,位置改變是由姿態改變引起的,所以改進方法生成路徑使無人艇路徑跟蹤效果更好。 仿真結果中,改進方法3種情形,單位航程區域覆蓋率均大于經典方法,路徑跟蹤誤差最大值與平均值均小于經典方法。仿真結果表明:改進方法生成路徑,提高了無人艇單位航程區域覆蓋率,提高了無人艇路徑跟蹤效果,可用于區域覆蓋任務中。 本文基于無人艇操縱性,根據掃海寬度與無人艇定常回轉直徑大小關系,結合無人艇艏向角連續,著重對回轉段進行運動分析與規劃,提出平行線掃描路徑規劃改進方法,并利用仿真試驗驗證。 相比經典方法,改進方法可實現對任意無人艇回轉直徑與掃海寬度進行區域覆蓋路徑規劃。仿真結果表明,無人艇回轉直徑等于、大于和小于掃海寬度 3種情形,平行線掃描路徑規劃改進方法提高了無人艇單位航程區域覆蓋率,提升了路徑跟蹤效果。 后續將進一步研究期望艏向角連續且可導的運動規劃方法,使期望角速度連續,解決艏向角變化滯后問題。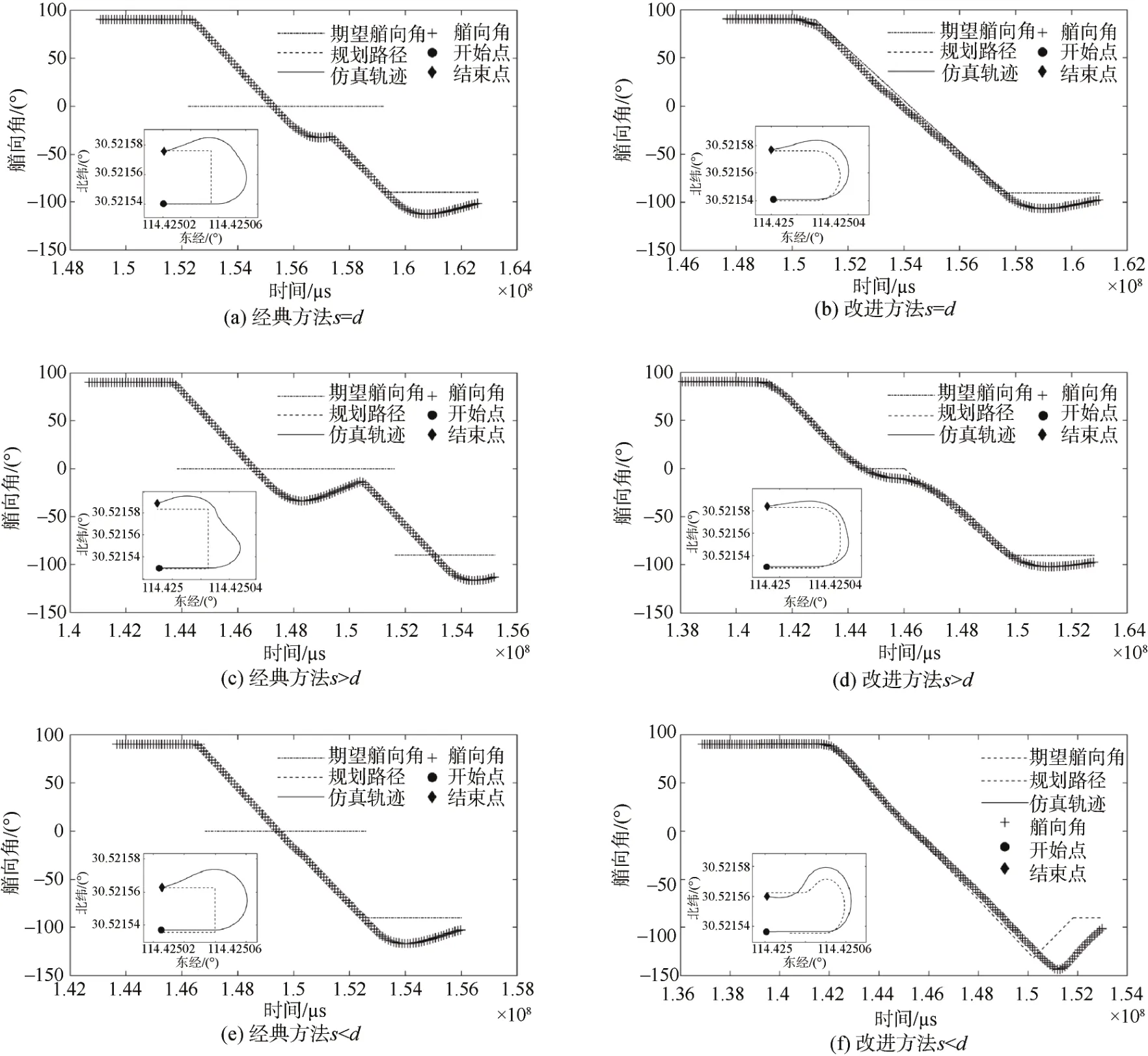
5 結束語
猜你喜歡
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
Coco薇(2016年2期)2016-03-22 02:42:52
中國工程咨詢(2016年4期)2016-02-14 07:28:28
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
電測與儀表(2015年5期)2015-04-09 11:30:52