基于Abaqus 的航天服波紋式肘關節有限元仿真平臺開發
2022-04-27 07:27:12董長林周仕明李道奎
載人航天 2022年2期
關鍵詞:模型
董長林, 尚 坤, 周仕明, 李道奎*
(1.國防科技大學空天科學學院, 長沙 410073; 2.空天任務智能規劃與仿真湖南省重點實驗室, 長沙 410073;3.中國航天員科研訓練中心人因工程重點實驗室, 北京 100094)
1 引言
艙外航天服主要用于航天員艙外作業時維持其所必須的生存環境,但航天服充氣后,由于內外壓差、運動過程中體積變化等因素的影響,關節處會產生較大的阻力矩,從而降低航天員的操作能力。 因此關節阻力矩大小是評價航天服性能的主要指標,確定和預測關節阻力矩在航天服設計與應用中具有重要意義。
目前,研究人員主要通過實驗、理論、數值模擬等方法確定關節阻力矩。 Vykukal 等介紹了一種航天服關節阻力矩的測量裝置,多應用于外置法測量。 Matty提出了一種水平面內的阻力矩測量方法,能夠消除重力的影響,并在工程中得到廣泛應用。 基于該方法,Meyen 等針對航天服軟關節進行了內置法實驗,得到了航天服關節阻力矩。 Schmidt將航天服分別簡化為膜模型和梁模型,并進行了實驗驗證,結果表明航天服力學特性更符合膜模型的特點,即關節阻力矩特性主要由壓縮氣體導致。 劉文樵等提出了一種利用龍門式模臺滑組的外置法實驗方法,保證了測量過程中的關節勻速轉動及轉角測量的準確性。 王曉東等開展了航天員艙外作業上肢關節實驗,發現關節阻力矩不僅具有遲滯特性,而且具有與運動歷程相關的特性。 上述內置法及外置法實驗方法,NASA及中國航天員科研訓練中心均有采用。
由于實驗方法較仿真成本高,隨著計算機科學和仿真技術的發展,數值模擬方法被應用于求解航天服關節阻力矩。 Furuya 等分別針對充氣狀態的圓筒關節模型和波紋管關節模型進行了關節彎曲仿真,并分析了航天服關節彎曲過程中褶皺出現的原因以及褶皺的發展。 尚坤等針對平褶式航天服關節進行了有限元仿真分析,并通過能量法分析發現關節阻力矩是由于氣體壓縮、材料變形及材料摩擦共同引起。 王魯豫等針對波紋式髖關節單歷程關節阻力矩特性進行了仿真分析和優化,降低了關節阻力矩。 在理論方面,Schmidt建立了航天服關節變形的物理模型,對航天服阻力矩進行了計算,但由于體積計算存在誤差且只考慮體積變化引起的阻力矩,導致阻力矩計算僅適用于關節在小范圍運動的情況。李廣利等基于阿布拉莫夫對軟關節內外平衡關系的假設,利用能量法推導了線彈性范圍內軟關節阻力矩方程,但并未考慮材料厚度變化、材料非線性以及限制帶等實際情況,因此只適用于小轉動。
由于航天服關節的實際運動復雜,理論方法適用范圍較小,難以直接應用;實驗方法成本較高,難以用于優化設計;有限元仿真計算耗時較長。 因此大量學者轉向對航天服關節復雜運動歷程的阻力矩預測方法進行研究。 王昊等、趙京東等通過外置法測量得到了航天服關節阻力矩,并通過樣條曲線對實驗數據進行了擬合,但外插精度有限。 張新軍等采用了一種物理對稱的Jiles?Atherton 遲滯模型對阻力矩數據進行了擬合,由于模型本身的對稱性,因此對阻力矩的擬合結果局部存在較大誤差,在航天服阻力矩領 域 應 用 存 在 局 限 性。 Schmidt首 次 將Preisach 模型用于預測關節阻力矩特性,之后的大部分研究均是基于該模型展開。 念龍生等從數學的角度對Preisach 模型進行了改進,在此基礎上,劉文樵等引入了新的內插方法并將其運用到了航天服關節阻力矩的預測上。 文劍將BP 神經網絡與Preisach 模型相結合,進行了阻力矩預測;王曉東等采用NNOPM(RBF 神經網絡優化的Preisach 模型)對關節阻力矩進行了預測。 但采用Preisach 模型時,需要較多實驗數據才能保證預測的精度,數據較少則會導致預測出現局部誤差;若直接進行參數辨識則需要長時間的計算才能獲得較高精度的預測模型。
航天服人-服耦合特性下模型復雜,參數化難度大,復雜運動仿真分析耗時長。 因此有必要開發一套專用于航天服關節的有限元仿真平臺,并將關節阻力矩預測方法集成到軟件內部以實現快速預測。 人-服耦合運動的求解是一個強非線性問題,Abaqus 較其他有限元軟件具有明顯優勢,同時為提高開發效率并保障可靠性,現有研究多基于Abaqus 進行二次開發。 目前針對Abaqus進行二次開發的方法主要有3 種:①通過Python進行參數化建模與分析,但該方法可視化程度低,要求使用者具備一定的專業基礎和編程能力;②基于Abaqus 所提供的RSG(Really Simple GUI)進行簡單的插件開發,但各插件之間的關聯性和系統的封裝性均較差,且該方法繼承性也較差;③基于C++、VS、MFC 等進行圖形界面開發,再通過命令流對Abaqus 進行控制,由于利用外部軟件進行開發,交互性差,功能有限,輸出結果形式固定。 因此有必要開發可視化程度高、可操作性強、封裝型好、集成性強的航天服關節有限元仿真平臺。
航天服肘關節是完成上肢作業的主要關節,且一般采用波紋式結構來降低肘關節運動時產生的阻力矩。 本文以航天服波紋式肘關節為例,針對上述問題,考慮體積與壓力變化、材料非線性和人-服耦合特性,建立參數化的仿真模型;并對Preisach 模型進行改進,提出復雜運動歷程中的關節阻力矩預測方法;基于參數化仿真模型與阻力矩快速預測方法,開發一套航天服波紋式肘關節有限元仿真平臺。
2 仿真平臺設計
2.1 平臺整體框架
如圖1 所示,航天服波紋式肘關節仿真平臺由仿真分析與阻力矩快速預測2 個功能模塊和1個GUI 圖形交互界面組成。 仿真分析模塊的主要功能為:對航天服肘關節進行建模和計算,得到肘關節的阻力矩-轉角遲滯特性曲線。 阻力矩快速預測模型主要功能為:根據仿真分析得到遲滯特性曲線,對復雜運動下關節阻力矩的快速預測。GUI 圖形交互界面的主要功能為:將上述2 個功能模塊進行集成,并實現各模塊之間的交互和調用。
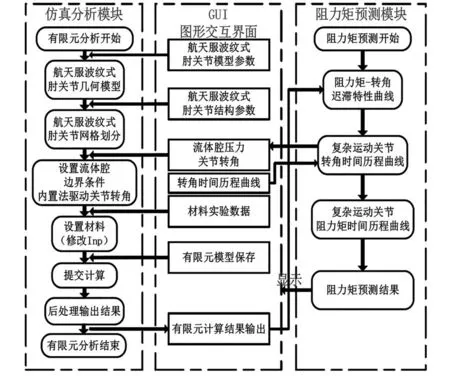
圖1 航天服波紋式肘關節仿真平臺模塊功能執行流程圖Fig.1 Module function and execution flow figure of spacesuit corrugated elbow joint simulation platform
2.2 仿真分析模塊
人-服耦合仿真分析流程主要包括以下步驟:①在CAD 軟件中建立航天服波紋式肘關節的幾何模型;②將幾何模型(含人體)導入到CAE軟件中,并根據各部分的結構特點進行網格劃分;③建立航天服肘關節兩端的端蓋以形成封閉腔體,進而定義邊界條件和載荷(關節轉角);④通過修改Inp 文件的方式輸入實驗數據來定義材料屬性;⑤進行顯式動力學分析;⑥結果后處理。
2.2.1 幾何建模
艙外航天服分為3 層結構:外部的防護層、中間的限制層以及內部的氣密層。 其中,限制層為織物材料,是主要的承載結構,因此以限制層作為主要研究對象。
本文通過SolidWorks 軟件建立了如圖2 所示的波紋式肘關節模型,包括波紋管結構和限制帶結構。 同時,根據GJB 36A-2008《飛行員人體模板設計和使用要求》的中號模板,建立了170 cm人體的大臂和小臂關節模型。
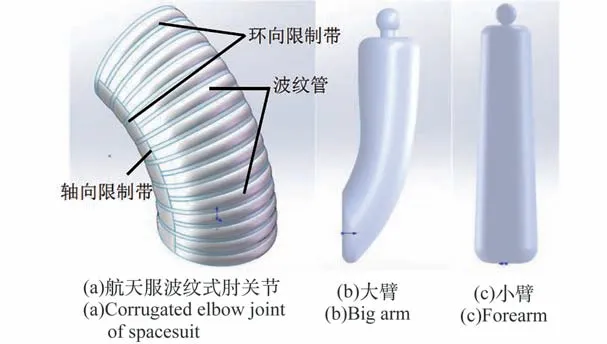
圖2 波紋式肘關節和人體手臂模型Fig.2 Corrugated elbow joint and human arm model
2.2.2 有限元建模
根據Schmidt 的研究,航天服波紋管厚度較薄,性能更接近于薄膜結構;而限制帶較厚,更接近于殼體結構。 因此,對限制帶和波紋管分別進行網格劃分,如圖3 所示。 因人體剛度遠大于織物材料剛度,故可將人體簡化為剛體模型。 兩端端蓋與波紋式航天服形成封閉腔體,由于不考慮端蓋所引起的體積變化,因此將兩端端蓋也設置為剛體。
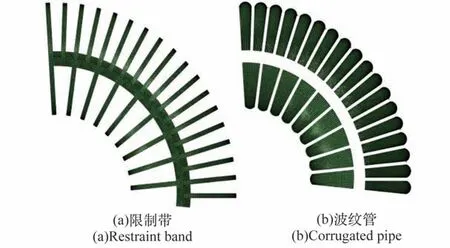
圖3 航天服波紋式肘關節的限制帶和波紋管網格模型Fig.3 Corrugated elbow joint restraint band and corrugated pipe for spacesuit mesh model
在之前的實驗研究中,獲得了織物材料的力學性能。 由于織物材料的屈曲、非線性特性以及經線與緯線之間的摩擦,織物材料拉伸和剪切力學性能呈現出明顯非線性,加載卸載曲線不一致,即加載卸載過程存在能量損耗,如圖4 所示。因此,在定義材料屬性時難以采用Abaqus 軟件中自帶的材料模型。 為解決該問題,一般有2 種思路:一是建立本構模型,通過VUMAT 來定義材料特性;二是修改Inp 文件,通過輸入實驗數據來定義材料特性。 為降低對工程人員在使用過程中的技術要求,本文采用后者。
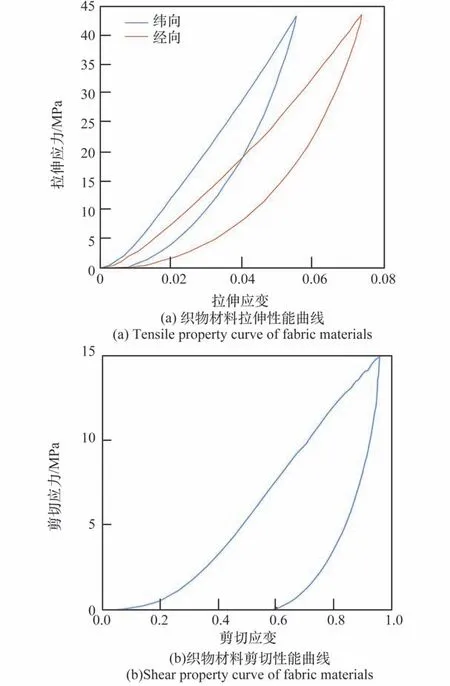
圖4 織物材料拉伸、剪切力學性能曲線圖Fig.4 Graph of tensile and shear mechanical proper?ties of fabric materials
采用內置法的人體驅動方式,以模擬人體驅動下的充壓航天服波紋式肘關節彎曲情況,即人體著服后,大臂及上端蓋固定約束,小臂繞肘關節旋轉一定的角度以驅動航天服肘關節彎曲。 肘關節的轉動中心如圖5 所示。 對小臂進行加載時,先加載至目標角度再卸載到初始位置。 航天服內部通過流體腔法充壓以模擬航天服內氣體環境,航天服內部壓力曲線和肘關節轉角曲線如圖6 所示。 同時,定義人服接觸以及航天服自接觸。
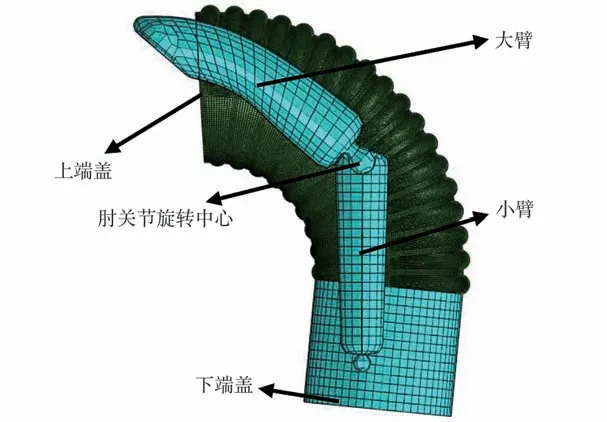
圖5 航天服裝配關系及關節旋轉中心圖Fig.5 Diagram of spacesuit assembly relation and joint rotation center
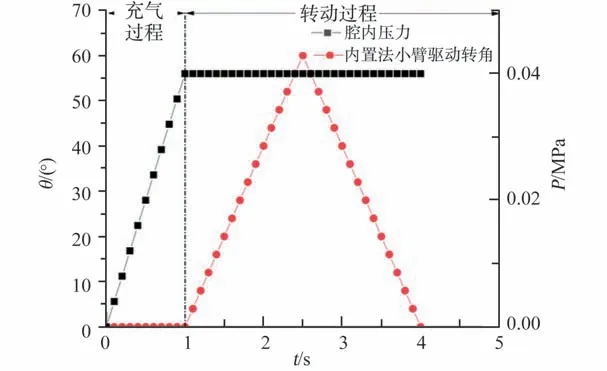
圖6 航天服內壓與關節驅動加載圖Fig.6 Diagram of spacesuit internal pressure and joint actuation
2.2.3 分析與求解
航天服肘關節運動仿真分為2 步:第一步為充氣,對航天服充氣以模擬航天服所需的氣體環境;第二步為運動,小臂繞肘關節中心轉動。 由于本文采用流體腔法來模擬航天服的內部氣體環境,因此進行顯式求解,以獲得航天服關節阻力矩-轉角遲滯特性曲線。
2.3 阻力矩預測模塊
以仿真獲得的阻力矩-轉角遲滯特性曲線作為輸入,采用Preisach 模型對復雜運動的阻力矩進行預測。 Preisach 模型積分定義如式(1)所示:

式中,() 為關節轉角,(,) 為遲滯函數,為符號函數,在正、負積分區域的取值分別為+1和-1。 根據的正負性可將式(1)整理為式(2):

定義整個積分區域為,對式(2)進行整理,并將阻力矩轉為正積分或負積分區域的積分形式,有式(3):

當關節運動時,關節轉角的變化將導致積分平面發生變化,如圖7 所示。 積分平面正負積分區域邊界拐點記錄加載卸載歷程中的極值點,即通過該方法對阻力矩進行預測時能夠考慮運動歷程的影響,如圖8 所示為復雜運動歷程下正積分區域分解圖,能夠用于計算積分值。
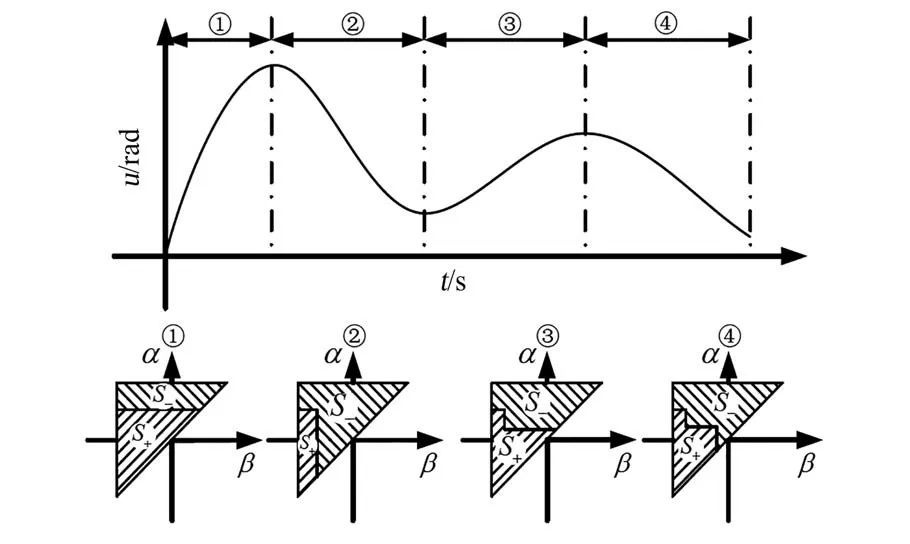
圖7 復雜運動對應積分平面變化圖Fig.7 Diagram of complex motion corresponds to the integral plane change
考慮到阻力矩可以通過積分或微分方式進行描述。 微分描述遲滯函數的方法受實驗數據噪聲影響較大,因此利用積分幾何意義,采用權重系數法對預測點位置的積分值進行預測。
當輸入數據較少時,預測點的臨近數據點的權重會發生變化,進而使得預測值產生較大的局部誤差。 利用圖8 中積分平面邊界=上的點在正積分區域積分為0 的特性,對發生了權重偏移的點進行修正,以減少數據離散所引起的局部誤差。
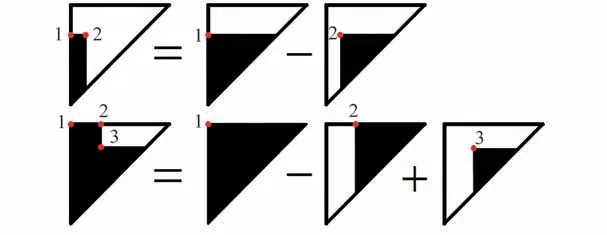
圖8 復雜運動積分平面分解圖Fig.8 Diagram of complex motion integral plane de?composition
2.4 GUI 圖形交互界面
GUI 圖形交互界面如圖9 所示。 仿真平臺主界面主要包括主菜單、可拖拽工具欄、功能菜單、建模與分析工具欄、輔助工具箱、子界面、顯示框、信息提示框和命令行。 主菜單提供模型文件保存、視圖設定、幫助文檔查詢等操作;可拖拽工具欄提供與建模相關的輔助功能;功能菜單可實現各功能之間轉換;建模與分析工具欄包括航天服波紋式肘關節的快速建模、分析及阻力矩預測等按鈕;輔助工具箱與可拖拽工具欄的功能類似,主要提供模型分割、載荷設置等輔助功能;子界面提供參數定義、模型可視化等功能,或進行錯誤提示;顯示框進行建模過程及結果的顯示;信息提示框將執行結果及輔助功能操作結果進行顯示;命令行提供命令流的輸入功能。

圖9 航天服仿真平臺及各功能模塊圖Fig.9 Diagram of spacesuit simulation?platform and function modules
圖形界面允許工程人員隨時介入分析流程,增強了可操作性,調用時設置了報錯和中斷機制,避免模型參數不匹配或模型干涉等問題導致有限元建模過程出現錯誤。
2.5 內部執行流程
仿真平臺內部執行流程如圖10 所示。 首先通過bat 文件調用航天服波紋式肘關節阻力矩仿真平臺,執行App.py 腳本,創建應用程序并打開主窗口;其次,運行MainWindow.py 進行主窗口上層布局初始化,界面如圖9 所示;然后,執行Mod?uleGui.py 和ToolboxButtonsGui.py 設置菜單欄以及功能鍵并關聯執行事件的py 文件;接著,通過Form.py 腳本和DB.py 腳本啟動核文件Kernel.py所需參數的輸入界面并進行參數傳遞,同時設置參數報錯機制,參數驗證無誤后將參數傳遞至VB文件并調用SolidWorks 建立參數化模型,導入軟件并進行前處理和仿真分析,計算完成后輸出阻力矩-轉角遲滯特性曲線并進行顯示;最后,通過GUI 圖形交互界面輸入關節轉角變化曲線,讀取阻力矩-轉角遲滯特性曲線,調用核文件Kernel.py 內置的阻力矩預測方法,實現復雜運動下航天服關節阻力矩的預測。
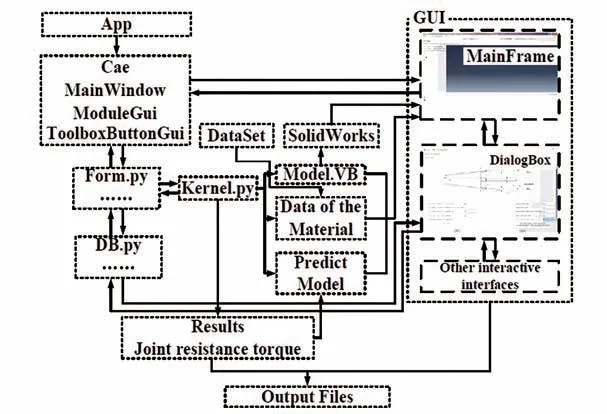
圖10 仿真平臺內部執行流程圖Fig.10 Internal overall frame diagram of the simula?tion platform
3 仿真平臺使用流程
根據上述設計思路,完成了仿真平臺的搭建。結合各功能模塊,對仿真平臺使用流程進行說明。
雙擊執行文件打開仿真平臺,仿真平臺的主要功能流程主要分為以下6 個步驟:①點擊“Step1”按鈕,根據模型結構提示設置參數,完成參數化建模;②點擊“Step2”按鈕,進行材料設置,默認的航天服材料為織物材料,也可下拉菜單選擇“新材料”的選項,實現新材料的輸入;③點擊“Step3”按鈕,根據工況類型設置載荷及邊界條件,接觸無需手動定義,仿真平臺將自動定義;④點擊“Step4”按鈕,設置工作路徑并保存模型;⑤點擊“Step5”按鈕,進行顯式計算,計算完成后將自動進行后處理,并顯示結果;⑥點擊“Step6”按鈕,輸入關節運動歷程曲線,計算該歷程下關節阻力矩變化情況,計算完成后將自動顯示并保存結果。 各步驟的交互界面如圖11 所示。

圖11 建模與分析參數輸入界面Fig.11 Input interfaces of modeling and analyzing parameters
4 仿真平臺分析算例
4.1 模型建立
利用本文開發的航天服波紋式肘關節有限元仿真平臺,按照使用流程對肘關節的運動過程進行計算。 航天服肘關節的結構參數為:中間上部織物材料高度=13 mm,中間層分隔單元高度=6 mm,中間下部織物材料高度=13 mm,上部織物材料與水平面夾角=5.5°,下部織物材料與水平面夾角=5.5°,上外部織物材料截面圓角半徑=12 mm,下外部織物材料截面圓角半徑=12 mm,內部織物材料截面圓角半徑=12 mm 以及肘關節關節半徑=82 mm。 生成的單個波紋管模型如圖12 所示。
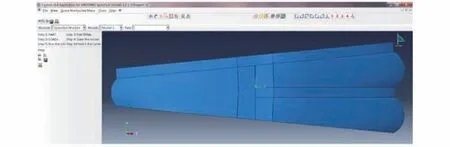
圖12 單個波紋管模型Fig.12 Corrugated elbow unit of spacesuit
4.2 結果與討論
讀取仿真結果(odb 文件),得到航天服波紋式肘關節的應力云圖,如圖13 所示。 航天服肘關節在運動過程中阻力矩具有遲滯特性,其關節阻力矩-轉角遲滯特性曲線(含位移云圖)如圖14 所示。
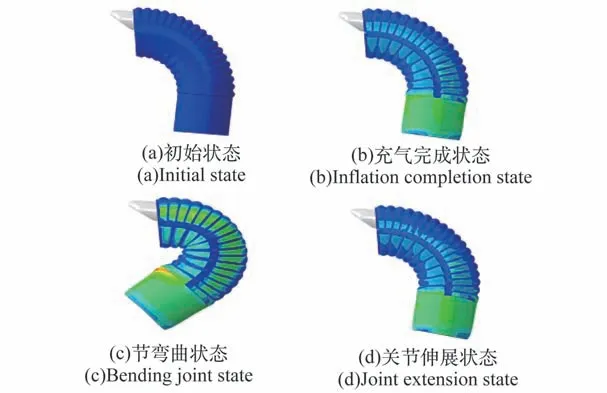
圖13 航天服波紋式肘關節應力云圖Fig.13 Stress cloud of spacesuit corrugated elbow
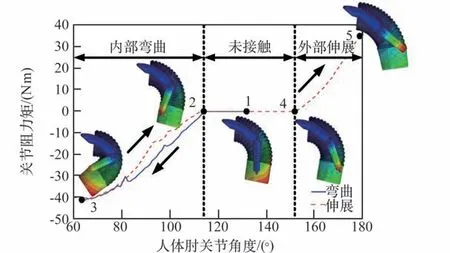
圖14 關節阻力矩-轉角遲滯特性曲線Fig.14 Hysteresis characteristic curve of joint resist?ance torque rotation
基于仿真平臺對文獻[7]中關節運動阻力矩進行預測,得到圖15 所示航天服關節阻力矩預測結果,與文獻中實驗數據對比,方差不超過0.04(Nm),驗證了阻力矩預測方法的有效性和正確性。
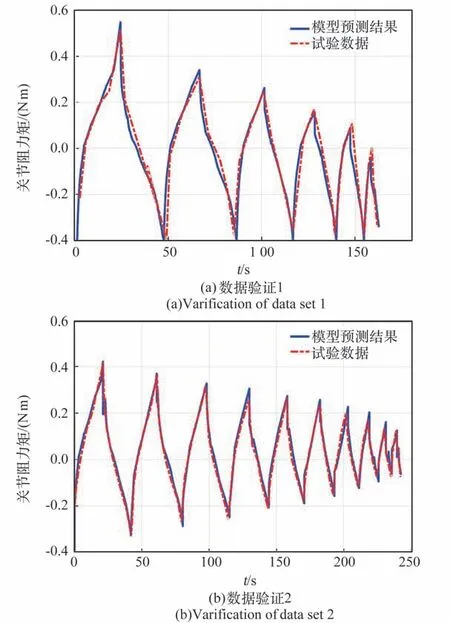
圖15 關節阻力矩預測模型驗證結果Fig.15 Validation results of a prediction model for joint resistance torque
同時對任意給定的關節轉角在時間歷程下的變化曲線進行預測,如圖16 所示。 圖中(a)段人服剛開始接觸,阻力矩較小;(c)段關節轉角未發生變化,阻力矩基本保持不變。 因此,主要針對(b)段展開研究,該段曲線有加載后卸載段、卸載后加載段以及卸載后過加載段,因此圖中運動歷程能夠充分體現關節運動過程中的阻力矩遲滯特性以及運動歷程的相關性。 采用有限元方法計算結果對阻力矩預測模型進行驗證。 阻力矩預測曲線與仿真結果對比如圖17 所示,方差為0.4220(Nm),從圖中還可看到,仿真結果在6.3 s 處存在局部波動,此時誤差最大,為6.13%;其余各處最大誤差為4.83%,誤差較小,驗證了關節阻力矩預測模型的有效性和準確性。
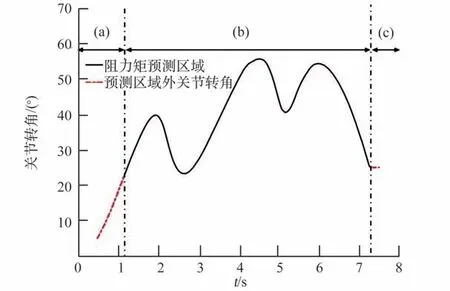
圖16 任意關節轉角時間歷程曲線Fig.16 Time history curve of arbitrary joint rotation
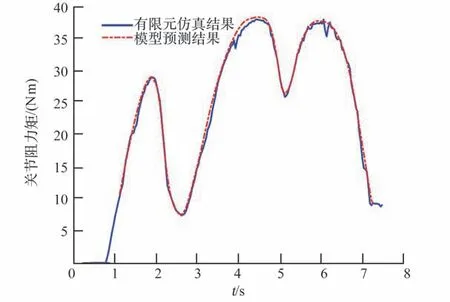
圖17 關節阻力矩時間歷程曲線Fig.17 Time history curve of joint resistance torque
5 結論
本文開發了航天服波紋式肘關節仿真平臺,針對有人狀態下的航天服肘關節進行了運動分析,并對復雜運動阻力矩進行了預測,得到以下結論:
1) 仿真分析模塊能夠實現波紋式肘關節快速建模與分析,并自動輸出仿真結果。 顯著減少了設計優化人員的建模及分析工作量,降低了對設計人員所需掌握專業知識的要求。
2) 阻力矩預測模塊能夠降低數據點減少引起的局部誤差,通過實驗結果和有限元計算結果驗證了改進后Preisach 模型的精度。 對復雜運動歷程關節阻力矩預測方法的研究有一定意義。
3) 仿真平臺實現了對外部軟件的調用和先進算法的內部集成,具有可視化程度高、操作性強、封裝性好、集成性強的特點,可用于提高航天服肘關節結構設計的高效性和便捷性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19