基于改進(jìn)快速行進(jìn)樹(shù)的自主代客泊車(chē)路徑規(guī)劃
2022-05-06 06:07:02張家旭周時(shí)瑩劉曄郭崇趙健
張家旭,周時(shí)瑩,劉曄,郭崇,趙健
(1.吉林大學(xué)汽車(chē)仿真與控制國(guó)家重點(diǎn)實(shí)驗(yàn)室,吉林長(zhǎng)春 130022;2.中國(guó)第一汽車(chē)集團(tuán)有限公司智能網(wǎng)聯(lián)研發(fā)院,吉林長(zhǎng)春 130011)
自主代客泊車(chē)系統(tǒng)被公認(rèn)為是解決“最后一公里”自動(dòng)駕駛問(wèn)題的有效手段,其核心組件包括感知、定位、規(guī)劃和控制,開(kāi)發(fā)高計(jì)算效率且滿足汽車(chē)非完整約束的路徑規(guī)劃方法是自主代客泊車(chē)系統(tǒng)落地的必要條件之一[1-2].為了加速自主代客泊車(chē)系統(tǒng)落地,國(guó)內(nèi)外眾多學(xué)者對(duì)自主代客泊車(chē)路徑規(guī)劃問(wèn)題展開(kāi)了廣泛研究.
目前,自主代客泊車(chē)路徑規(guī)劃問(wèn)題研究可劃分為基于優(yōu)化的規(guī)劃方法[3-6]、基于柵格的規(guī)劃方法[7-8]和基于隨機(jī)采樣的規(guī)劃方法[9-10].文獻(xiàn)[3]基于龍格-庫(kù)塔法建立了包含汽車(chē)運(yùn)動(dòng)學(xué)約束和避障約束的自主代客泊車(chē)路徑離散優(yōu)化模型,并采用內(nèi)點(diǎn)法求解該離散優(yōu)化問(wèn)題來(lái)獲得最優(yōu)的自主代客泊車(chē)路徑.文獻(xiàn)[4-6]以能量消耗最小和時(shí)間消耗最小為優(yōu)化目標(biāo),基于優(yōu)化理論獲得自主代客泊車(chē)路徑.盡管上述基于優(yōu)化的規(guī)劃方法可以得到最優(yōu)的自主代客泊車(chē)路徑,但優(yōu)化問(wèn)題求解過(guò)程所需的較大計(jì)算量限制了其工程應(yīng)用.
相對(duì)于基于優(yōu)化的規(guī)劃方法,基于柵格的規(guī)劃方法和基于隨機(jī)采樣的規(guī)劃方法是通過(guò)離散化自主代客泊車(chē)路徑搜索空間來(lái)提高計(jì)算效率,并分別通過(guò)精細(xì)化離散空間和增加采樣點(diǎn)數(shù)量來(lái)提高算法的完備性.文獻(xiàn)[7]和文獻(xiàn)[8]采用柵格地圖離散化自主代客泊車(chē)路徑搜索空間,并分別采用D*Lite 算法和混合A*算法規(guī)劃自主代客泊車(chē)路徑,但規(guī)劃的自主代客泊車(chē)路徑精度受限于柵格地圖的細(xì)化程度,而過(guò)于精細(xì)的柵格地圖所需的計(jì)算量較大.文獻(xiàn)[9]和文獻(xiàn)[10]采用隨機(jī)采樣點(diǎn)離散化自主代客泊車(chē)路徑搜索空間,并分別采用快速隨機(jī)擴(kuò)展樹(shù)算法(Rap?idly Random Tree,RRT)和RRT*算法規(guī)劃自主代客泊車(chē)路徑,但規(guī)劃的自主代客泊車(chē)路徑難以滿足汽車(chē)非完整約束.
鑒于此,本文將自主代客泊車(chē)路徑細(xì)分為用于引導(dǎo)汽車(chē)安全行駛到泊車(chē)位附近的引導(dǎo)路徑和用于引導(dǎo)汽車(chē)安全駛?cè)氩窜?chē)位的泊車(chē)路徑,并分別基于改進(jìn)快速行進(jìn)樹(shù)算法和Dubins曲線規(guī)劃引導(dǎo)路徑和泊車(chē)路徑.首先,采用類廣度優(yōu)先搜索策略建立環(huán)境地圖的“路徑場(chǎng)”,并提出一種高計(jì)算效率的避障檢測(cè)策略,基于環(huán)境地圖“路徑場(chǎng)”提出符合汽車(chē)非完整約束的遠(yuǎn)端參考點(diǎn)和近端參考點(diǎn)選取原則與路徑節(jié)點(diǎn)更新原則,通過(guò)使路徑節(jié)點(diǎn)逐漸靠近目標(biāo)節(jié)點(diǎn)來(lái)完成自主代客泊車(chē)引導(dǎo)路徑規(guī)劃任務(wù).隨后,基于Dubins 曲線規(guī)劃滿足初始泊車(chē)方位角任意性要求和泊車(chē)位方位角的非唯一性要求的泊車(chē)路徑,引導(dǎo)汽車(chē)安全駛?cè)氩窜?chē)位.最后,仿真驗(yàn)證所提自主代客泊車(chē)路徑規(guī)劃方法的可行性,結(jié)果表明:相對(duì)于基于傳統(tǒng)快速行進(jìn)算法的自主代客泊車(chē)路徑規(guī)劃方法,所提方法規(guī)劃的自主代客泊車(chē)路徑滿足汽車(chē)非完整約束要求,可以安全引導(dǎo)汽車(chē)完成自主代客泊車(chē)任務(wù).
1 引導(dǎo)路徑規(guī)劃
快速行進(jìn)樹(shù)算法采用類廣度優(yōu)先搜索策略建立環(huán)境地圖的“路徑場(chǎng)”,并沿著環(huán)境地圖“路徑場(chǎng)”梯度下降方向快速規(guī)劃出成本最小的無(wú)碰撞路徑.但環(huán)境地圖“路徑場(chǎng)”梯度下降方向變化率不滿足汽車(chē)的非完整約束要求,使規(guī)劃的無(wú)碰撞路徑不可執(zhí)行[11].為此,本節(jié)在類廣度優(yōu)先搜索策略建立的環(huán)境地圖“路徑場(chǎng)”基礎(chǔ)上改進(jìn)快速行進(jìn)樹(shù)算法,并利用改進(jìn)的快速行進(jìn)樹(shù)算法規(guī)劃自主代客泊車(chē)引導(dǎo)路徑,使規(guī)劃的路徑滿足汽車(chē)非完整約束要求.因此,改進(jìn)的快速行進(jìn)樹(shù)算法包括:環(huán)境地圖“路徑場(chǎng)”建立模塊和路徑規(guī)劃模塊.其中,環(huán)境地圖“路徑場(chǎng)”建立模塊的流程如圖1 所示,采用候選列表保存成本值未修正的節(jié)點(diǎn),采用開(kāi)放列表保存成本值已修正但未擴(kuò)展的節(jié)點(diǎn),以及采用封閉列表保存成本值已修正且已擴(kuò)展的節(jié)點(diǎn).并且從目標(biāo)節(jié)點(diǎn)開(kāi)始,采用類廣度優(yōu)先搜索策略維護(hù)候選列表、開(kāi)放列表和封閉列表來(lái)建立環(huán)境地圖“路徑場(chǎng)”.
基于圖2 所示的環(huán)境地圖“路徑場(chǎng)”建立實(shí)例,闡述圖1 所示的改進(jìn)快速行進(jìn)樹(shù)算法“路徑場(chǎng)”建立模塊流程.如圖2 所示,成本值已修正且已擴(kuò)展的目標(biāo)節(jié)點(diǎn)A和節(jié)點(diǎn)B保存在封閉列表中,成本值已修正但未擴(kuò)展的節(jié)點(diǎn)C、節(jié)點(diǎn)D和節(jié)點(diǎn)E保存在開(kāi)放列表中,成本值未修正的節(jié)點(diǎn)F和節(jié)點(diǎn)G保存在候選列表中.從開(kāi)放列表中取出成本值最小的節(jié)點(diǎn)D作為待擴(kuò)展節(jié)點(diǎn),將待擴(kuò)展節(jié)點(diǎn)D圓鄰域與候選列表交集作為待修正集合{節(jié)點(diǎn)F,節(jié)點(diǎn)G}.順序取出待修正集合中的節(jié)點(diǎn),將節(jié)點(diǎn)F圓鄰域與開(kāi)放列表交集中使其成本值最小的節(jié)點(diǎn)D作為其候選父節(jié)點(diǎn),將節(jié)點(diǎn)G圓鄰域與開(kāi)放列表交集中使其成本值最小的節(jié)點(diǎn)D作為其候選父節(jié)點(diǎn).若待修正集合中節(jié)點(diǎn)與其候選父節(jié)點(diǎn)構(gòu)成的路徑為無(wú)碰撞路徑,則將此節(jié)點(diǎn)從候選列表中刪除,并且將此節(jié)點(diǎn)標(biāo)記為已修正節(jié)點(diǎn),其候選父節(jié)點(diǎn)作為其真實(shí)父節(jié)點(diǎn).當(dāng)待修正集合為空時(shí),更新開(kāi)放列表和封閉列表,即將已修正節(jié)點(diǎn)插入開(kāi)放列表中,將待擴(kuò)展節(jié)點(diǎn)D從開(kāi)放列表中刪除,將待擴(kuò)展節(jié)點(diǎn)D插入封閉列表中.
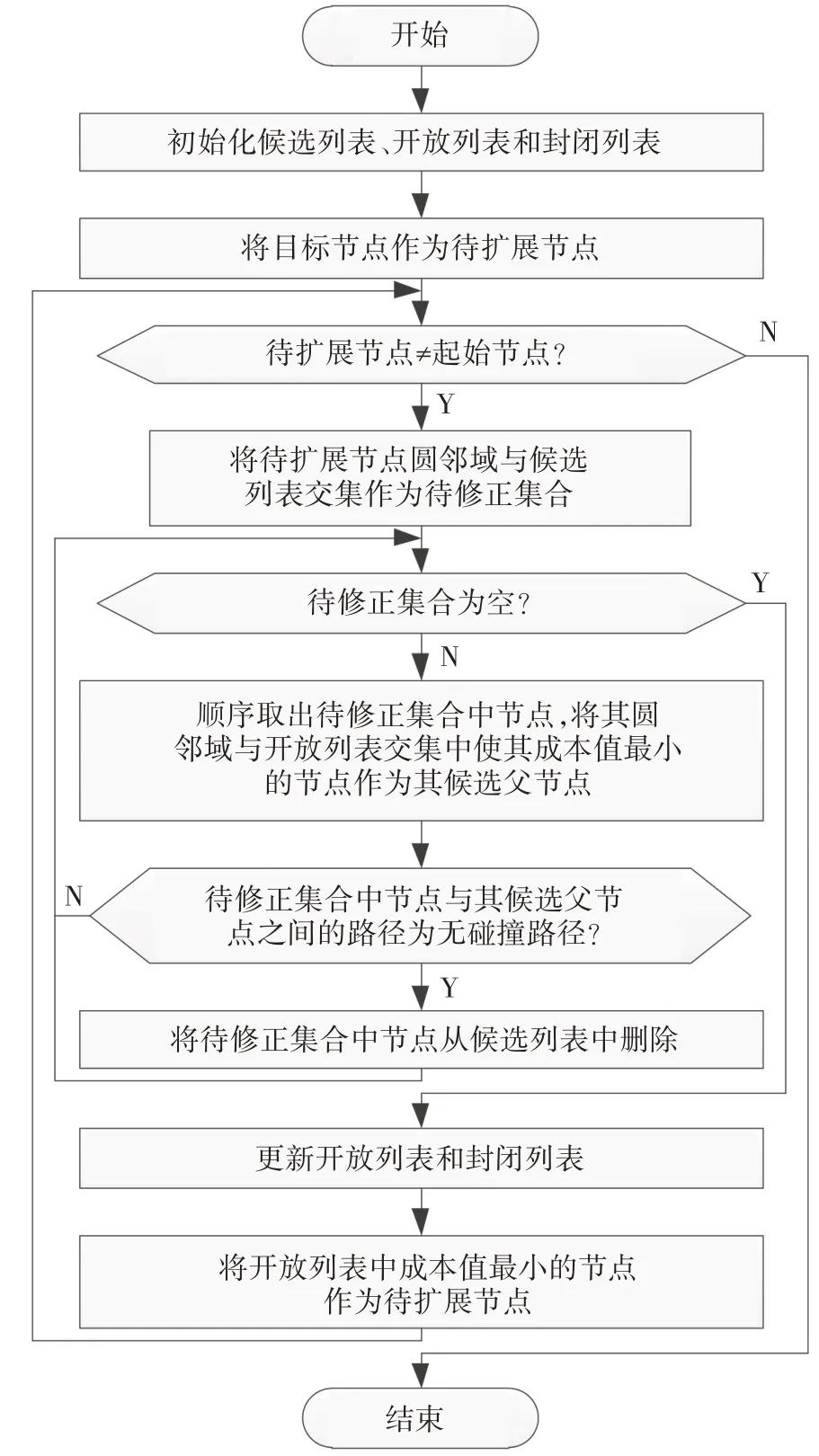
圖1 環(huán)境地圖“路徑場(chǎng)”建立模塊流程Fig.1 The building process of the“path field”of environmental map

圖2 環(huán)境地圖“路徑場(chǎng)”建立實(shí)例Fig.2 The building instance of the“path field”of environmental map
在圖1 所示的改進(jìn)快速行進(jìn)樹(shù)算法環(huán)境地圖“路徑場(chǎng)”建立模塊流程中,判斷待修正集合中節(jié)點(diǎn)與其候選父節(jié)點(diǎn)構(gòu)成的路徑是否為無(wú)碰撞路徑是一項(xiàng)需要較大計(jì)算量的工作[12].為了提高算法的計(jì)算效率,本節(jié)采用多邊形描述障礙物,并且將路徑與多邊形不相交問(wèn)題轉(zhuǎn)化為路徑與多邊形的邊不相交問(wèn)題,即兩條線段不相交問(wèn)題.如圖3 所示,基于向量積運(yùn)算性質(zhì),可得圖3(a)中線段M1M2與線段N1N2不相交的充分條件為

圖3 無(wú)碰撞路徑判斷策略Fig.3 The judgment strategy of collision-free path

式中:Lmax為點(diǎn)M1、M2、N1和N2之間的最大距離.
圖3(b)~(d)中線段M1M2與線段N1N2不相交的充分條件為:

式中:×表示向量積運(yùn)算;∥表示或運(yùn)算.
在圖1 所示的環(huán)境地圖“路徑場(chǎng)”建立模塊流程的基礎(chǔ)上,改進(jìn)快速行進(jìn)樹(shù)算法.基于圖4 所示的路徑規(guī)劃流程,規(guī)劃滿足汽車(chē)非完整約束的自主代客泊車(chē)引導(dǎo)路徑.

圖4 路徑規(guī)劃模塊流程Fig.4 The process of the path planning module
如圖4 所示,改進(jìn)快速行進(jìn)樹(shù)算法路徑規(guī)劃模塊主要依據(jù)選取的遠(yuǎn)端參考點(diǎn)和近端參考點(diǎn)來(lái)更新路徑節(jié)點(diǎn),使路徑節(jié)點(diǎn)從起始節(jié)點(diǎn)開(kāi)始逐漸靠近目標(biāo)節(jié)點(diǎn),進(jìn)而規(guī)劃出滿足汽車(chē)非完整約束的自主代客泊車(chē)引導(dǎo)路徑.因此,遠(yuǎn)端參考點(diǎn)和近端參考點(diǎn)的選取原則與路徑節(jié)點(diǎn)的更新原則是路徑規(guī)劃模塊的核心.如圖5(a)所示,在當(dāng)前路徑節(jié)點(diǎn)P1的大圓鄰域內(nèi)選取成本值最小的節(jié)點(diǎn)Pfar作為圓心點(diǎn),將以節(jié)點(diǎn)Pfar為圓心點(diǎn)的圓鄰域內(nèi)所有節(jié)點(diǎn)的橫、縱坐標(biāo)平均值構(gòu)成的節(jié)點(diǎn)作為當(dāng)前路徑節(jié)點(diǎn)P1的遠(yuǎn)端參考點(diǎn)Pfar,以避免選取的遠(yuǎn)端參考點(diǎn)靠近障礙物.為了提高計(jì)算效率,將當(dāng)前路徑節(jié)點(diǎn)P1與遠(yuǎn)端參考點(diǎn)Pfar之間的路徑作為汽車(chē)輪廓內(nèi)邊緣行駛軌跡,若當(dāng)前路徑節(jié)點(diǎn)P1與遠(yuǎn)端參考點(diǎn)Pfar之間的路徑與障礙物相交,則采用同樣的方式選取當(dāng)前路徑節(jié)點(diǎn)的近端參考點(diǎn)Pnear,并且以近端參考點(diǎn)Pnear作為當(dāng)前路徑節(jié)點(diǎn)P1更新的參考點(diǎn).若當(dāng)前路徑節(jié)點(diǎn)P1與近端參考點(diǎn)Pnear之間的路徑方向滿足汽車(chē)非完整約束要求,則沿著當(dāng)前路徑節(jié)點(diǎn)P1與近端參考點(diǎn)Pnear之間的路徑方向更新當(dāng)前路徑節(jié)點(diǎn)P1;否則,按照更新后的路徑節(jié)點(diǎn)能夠最大限度靠近近端參考點(diǎn)Pnear原則,基于汽車(chē)最小轉(zhuǎn)彎半徑更新當(dāng)前路徑節(jié)點(diǎn)P1.

圖5 參考點(diǎn)選取原則和路徑節(jié)點(diǎn)更新原則Fig.5 The principles of selecting reference point and updating path node
如圖5(b)所示,若當(dāng)前路徑節(jié)點(diǎn)P1與遠(yuǎn)端參考點(diǎn)Pfar之間的路徑與障礙物不相交,則遠(yuǎn)端參考點(diǎn)Pfar作為當(dāng)前路徑節(jié)點(diǎn)P1更新的參考點(diǎn).若當(dāng)前路徑節(jié)點(diǎn)P1與遠(yuǎn)端參考點(diǎn)Pfar之間的路徑方向滿足汽車(chē)非完整約束要求,則沿著當(dāng)前路徑節(jié)點(diǎn)P1與遠(yuǎn)端參考點(diǎn)Pfar之間的路徑方向更新當(dāng)前路徑節(jié)點(diǎn)P1;否則,按照更新后的路徑節(jié)點(diǎn)能夠最大限度靠近遠(yuǎn)端參考點(diǎn)Pfar原則,基于汽車(chē)最小轉(zhuǎn)彎半徑更新當(dāng)前路徑節(jié)點(diǎn)P1.
2 泊車(chē)路徑規(guī)劃
當(dāng)汽車(chē)沿著自主代客泊車(chē)引導(dǎo)路徑行駛到斜向泊車(chē)位附近時(shí),泊車(chē)路徑用于將汽車(chē)安全地引導(dǎo)到斜向泊車(chē)位,進(jìn)而完成自主代客泊車(chē)任務(wù)[13].考慮初始泊車(chē)方位角的任意性,以及斜向泊車(chē)位方位角的非唯一性,基于Dubins曲線,本節(jié)規(guī)劃針對(duì)斜向泊車(chē)位的泊車(chē)路徑.
Dubins 曲線是在滿足汽車(chē)非完整約束和邊界約束條件下,連接泊車(chē)起始點(diǎn)和目標(biāo)點(diǎn)的最短路徑.采用R表示汽車(chē)以最小轉(zhuǎn)彎半徑右轉(zhuǎn),采用S表示汽車(chē)沿著直線行駛,采用L 表示汽車(chē)以最小轉(zhuǎn)彎半徑左轉(zhuǎn),則連接泊車(chē)起始點(diǎn)和目標(biāo)點(diǎn)的最短路徑是圖6所示的四種Dubins 曲線之一,即RSR,RSL,LSR 和LSL.本節(jié)基于文獻(xiàn)[14]提出的方法,計(jì)算連接泊車(chē)起始點(diǎn)和目標(biāo)點(diǎn)的四種Dubins 曲線,并將無(wú)碰撞且最短的Dubins曲線作為泊車(chē)路徑.

圖6 基于Dubins曲線的泊車(chē)路徑Fig.6 The parking path based on Dubins curves
3 仿真分析
在VC++6.0 環(huán)境中,仿真驗(yàn)證本文提出的基于改進(jìn)快速行進(jìn)樹(shù)算法的自主代客泊車(chē)路徑規(guī)劃方法.仿真驗(yàn)證過(guò)程采用的汽車(chē)參數(shù)為:汽車(chē)軸距L=2.405 m、汽車(chē)寬度W=1.523 m、汽車(chē)前懸長(zhǎng)度Lf=0.800 m、汽車(chē)后懸長(zhǎng)度Lr=0.950 m 和汽車(chē)最小轉(zhuǎn)彎半徑Rmin=4.200 m,仿真結(jié)果如圖7 所示.考慮汽車(chē)輪廓的影響和后續(xù)路徑跟蹤控制模塊容差要求,對(duì)障礙物進(jìn)行了膨脹處理,圖7 中的虛線封閉區(qū)域?yàn)檎系K物膨脹區(qū)域.


圖7 自主代客泊車(chē)路徑規(guī)劃結(jié)果Fig.7 The planning results of autonomous valet parking path
圖7(a)為采用類廣度優(yōu)先搜索策略建立的環(huán)境地圖“路徑場(chǎng)”,圓圈和五角星分別表示自主代客泊車(chē)起始點(diǎn)和目標(biāo)點(diǎn);圖7(b)為快速行進(jìn)樹(shù)算法沿著圖7(a)所示的環(huán)境地圖“路徑場(chǎng)”梯度下降方向規(guī)劃出的引導(dǎo)路徑,粗實(shí)線表示引導(dǎo)路徑,細(xì)實(shí)線表示當(dāng)前節(jié)點(diǎn)的梯度下降方向;圖7(c)、圖7(d)為本文提出的改進(jìn)快速行進(jìn)樹(shù)算法規(guī)劃出的引導(dǎo)路徑,粗實(shí)線表示改進(jìn)快速行進(jìn)樹(shù)算法規(guī)劃出的引導(dǎo)路徑,虛線表示快速行進(jìn)樹(shù)算法規(guī)劃出的引導(dǎo)路徑;圖7(e)為汽車(chē)沿自主代客泊車(chē)路徑行駛產(chǎn)生的包絡(luò).由圖7(b)~(e)可知,快速行進(jìn)樹(shù)算法和本文提出的改進(jìn)快速行進(jìn)樹(shù)算法規(guī)劃出的引導(dǎo)路徑均為無(wú)碰撞路徑.并且兩種算法規(guī)劃的路徑長(zhǎng)度相當(dāng),但快速行進(jìn)樹(shù)算法規(guī)劃出的引導(dǎo)路徑存在方向變化率較大的折點(diǎn)A和B,而本文提出的改進(jìn)快速行進(jìn)樹(shù)算法規(guī)劃的引導(dǎo)路徑更平滑,滿足汽車(chē)非完整約束要求.同時(shí),由圖7(e)可知,在初始泊車(chē)方位角不為零時(shí),本文基于Dubins曲線規(guī)劃出的針對(duì)斜向泊車(chē)位的泊車(chē)路徑可以安全引導(dǎo)汽車(chē)駛?cè)氩窜?chē)位.
4 結(jié)論
1)基于改進(jìn)快速行進(jìn)樹(shù)算法規(guī)劃出自主代客泊車(chē)系統(tǒng)的引導(dǎo)路徑.采用類廣度優(yōu)先搜索策略建立了環(huán)境地圖的“路徑場(chǎng)”,并提出了一種高計(jì)算效率的避障檢測(cè)策略,以及基于環(huán)境地圖“路徑場(chǎng)”提出了一種符合汽車(chē)非完整約束的遠(yuǎn)端參考點(diǎn)和近端參考點(diǎn)選取原則與路徑節(jié)點(diǎn)更新原則.在上述策略和原則的加持下,通過(guò)使路徑節(jié)點(diǎn)逐漸靠近目標(biāo)節(jié)點(diǎn)來(lái)完成自主代客泊車(chē)引導(dǎo)路徑規(guī)劃任務(wù).
2)基于Dubins曲線規(guī)劃出自主代客泊車(chē)系統(tǒng)的泊車(chē)路徑.充分考慮初始泊車(chē)方位角任意性要求和泊車(chē)位方位角的非唯一性要求,計(jì)算連接泊車(chē)起始點(diǎn)和目標(biāo)點(diǎn)的四種Dubins曲線,即RSR,RSL,LSR和LSL,將無(wú)碰撞且最短的Dubins 曲線作為泊車(chē)路徑,進(jìn)而完成泊車(chē)路徑規(guī)劃任務(wù).
3)在VC++6.0 環(huán)境中,仿真驗(yàn)證本文提出的自主代客泊車(chē)路徑規(guī)劃方法的可行性.結(jié)果表明:相對(duì)于傳統(tǒng)的快速行進(jìn)算法,所提方法規(guī)劃的自主代客泊車(chē)路徑滿足汽車(chē)非完整約束要求,可以安全引導(dǎo)汽車(chē)完成自主代客泊車(chē)任務(wù).
猜你喜歡
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
兒童時(shí)代·快樂(lè)苗苗(2017年7期)2018-01-24 18:28:45
商周刊(2017年5期)2017-08-22 03:35:26
中國(guó)衛(wèi)生(2016年2期)2016-11-12 13:22:16
作文大王·低年級(jí)(2016年4期)2016-04-18 00:24:37
中國(guó)工程咨詢(2016年4期)2016-02-14 07:28:28
決策探索(2014年21期)2014-11-25 12:29:50