基于無人機航拍圖像的輸電線異物檢測算法研究
2022-05-06 04:19:28于國軍鄒梓龍彭佳琪施陳敬
江西科學 2022年2期
于國軍,鄒梓龍,付 小,彭佳琪,施陳敬
(1. 東華理工大學測繪工程學院, 330013, 南昌;2.東華理工大學地球科學學院, 330013, 南昌; 3.廣東國地資源與環境研究院, 510000, 廣州)
0 引言
電力是我國安全生產與國民生活的重要基礎,對輸電線路的定期巡檢是保障電力安全的重要措施之一。目前我國對輸電線路巡檢還是以傳統人工巡檢為主,然而我國輸電線路覆蓋廣闊、地理條件復雜多變、部分地區氣候環境惡劣的特點,給輸電線路巡檢工作帶來了重大挑戰[1-2]。近年來,通過無人機結合圖像處理技術自動識別電力線上的可見異物成為熱點,應用圖像處理和模式識別等多種理論,可以提取異物區域懸掛的信息,從而有效提高輸電線路巡檢的自動化,彌補傳統人工巡檢的缺點,減輕巡檢人員勞動強度[3]。
在日常輸電線路巡檢中輸電線受到異物(如風箏、塑料袋、氣球等)影響是電力安全的主要威脅,當異物懸掛在輸電線路上,會縮短放電距離引發電路短路,造成電力能源輸送中斷,導致大面積停電。因此,如何完整、有效、快速地從航拍圖像中識別異物成為重要的研究課題。在使用傳統圖像處理方法對電力線異物提取中,文獻[4]提出了一種基于形態學改進的Otsu自適應闌值分割算法,采用改進的Otsu去除背景噪聲,使用梯度法獲取電力線邊緣位置,再利用Hough變換分析線路數量達到識別異物目的。文獻[5]提出一種基于線結構感知的輸電線異物檢測方法,在水平與垂直方向梯度算子獲取復雜背景下線對象,對獲取的線對象分段分析灰度、線寬來識別輸電線上異物。傳統圖像處理方法的規則定義和參數配置均需人為參與,以致算法的自適應能力降低。近年來,隨著深度神經網絡的發展,各種神經網絡模型也被應用在異物識別之中。文獻[6]提出了一種簡單有效的尺度直方圖匹配方法,設計了基于有向包圍盒回歸策略的網絡,準確預測復雜背景下外來物體的空間位置和方位角以達到檢測電力線異物的目的。文獻[7]提出一種改進膠囊網絡模型對輸電線路異物識別的方法,通過對電力線異物深度特征提取并改進主膠囊層和動態路由結構達到電力線異物的識別。由于電力行業的特殊性,電力線異物為小概率事件并且一旦出現,巡檢人員會在第一時間內清除,以至于異物數據獲取困難,并且國內外均無無人機航拍電力線異物的開源數據庫,對于神經網絡訓練有很大的限制。
針對上述圖像中電力線異物提取問題,本文提出一種關于電力線中線的異物檢測方法。彌補數據獲取困難與復雜背景的影響。首先,采用先驗知識與最小二乘算法對電力線圖像中電力線興趣區獲取與中心線準確提取;其次,沿電力線中線方向上觀察像元的灰度變化通過閾值獲取顏色顯著的異物點,通過二值圖像判斷像元偏離電力線中心線距離進而辨別是否有顏色相近的異物;最后,采用RCF邊緣檢測和種子區域生長法提取異物范圍。
1 感興趣區的獲取
在航拍圖像中準確識別異物故障的前提是對電力線的識別和準確定位,例如斷股檢測、弧垂計算、覆冰厚度測量、危險交跨物距離測量等[8-9]。
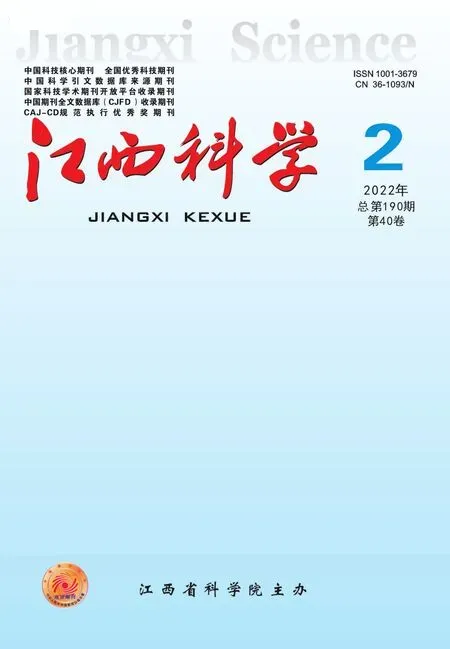
本文采用Hough變換對圖像中輸電線進行提取[10],該算法是將電力線近似看為直線。然而無人機近距離實際拍攝的圖像中電力線受下垂弧度影響在圖像中是一條曲線,因此無人機近距離拍攝的情況下使用Hough變換方法擬合的電力線與實際曲線不吻合。本文在使用Hough變換獲取電力線定位時,采用向其周圍擴大20個像素點的方法來判定興趣區,為輸電線中心線的準確擬合奠定基礎,如圖1所示。
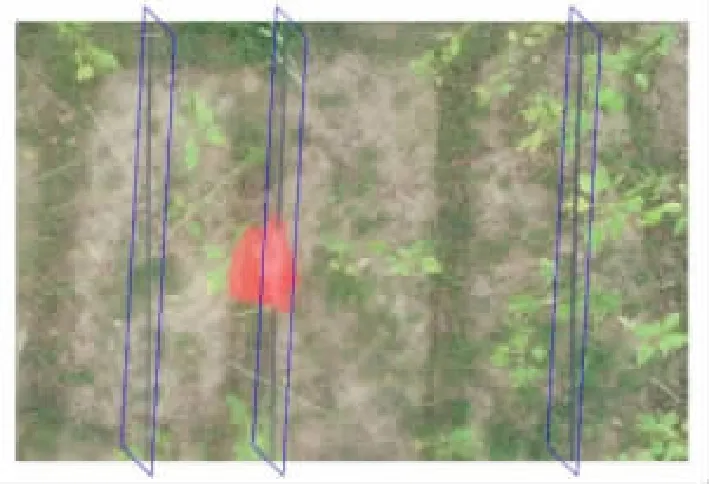
圖1 獲取興趣區域結果圖
2 擬合電力線中心線
圖像分割是圖像處理中最困難的任務之一,本文采用Sauvola自適應局部分割算法將圖像分割為目標和背景兩類,利用局部閾值分割的方法將目標和背景有效地區分[11-12]。首先通過興趣區的獲取減少了航拍圖像背景復雜的影響,然后用5×5模板對興趣區進行中值濾波處理,使Sauvola自適應局部分割算法能夠消除剩余噪聲的影響,保證最小二乘擬合曲線的準確度[13]。
(1)
式中:mean為動態窗口中像素灰度平均值,k為調整系數,R為灰度等級范圍值。
在Sauvola算法處理的基礎上用最小二乘算法根據目標中像素位置進行擬合,數學模型建立三次曲線,模型為y=a0+a1x+a2x2+a3x3,創建數組x、y,記錄二值圖中前景每個像素坐標,放入x和y數組。依據最小二乘法偏差平方和最小原則,計算各點到擬合曲線的距離之和,即偏差平方和為:
(2)
為求得符合條件的a值,對等式右邊進行求導計算,得到的等式表示成矩陣的形式,后化簡為范德蒙德矩陣為:
(3)
由式(3)轉化矩陣計算得到了矩陣系數a0、a1、a2和a3同時得到擬合曲線,如圖2所示。
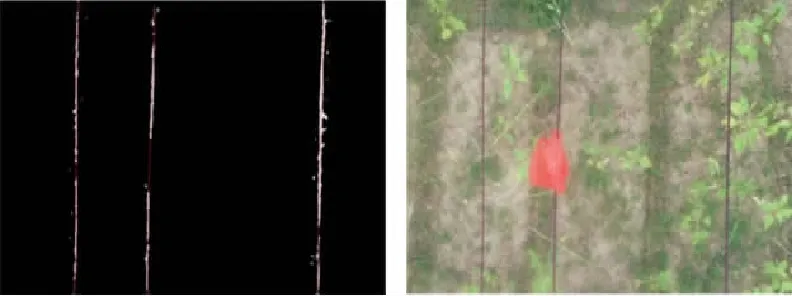
圖2 擬合輸電線路圖
3 輸電線異物判斷
3.1 灰度顯著性異物點判定
根據上述算法擬合出電力線在圖像中是一組貫穿圖像曲線,在實際生活中一條電力線為一種顏色,幾乎不會出現一條電力線上有幾種不同顏色,因此可以通過獲取中線穿過像素之間的灰度顯著性差異來判斷與電力線上是否有灰度差異較大的異物。首先對圖像進行灰度化處理,然后采用5×5模板進行中值濾波處理,消除數據采集時引入的噪聲點,最后獲取電力線中線穿過的像素灰度值。由圖3(a)可知,擬合的第2條輸電線中心線上部分像素灰度值偏離正常輸電線灰度值,即證明輸電線上懸掛有灰度顯著的異物時,在沿著輸電線中心線的方向上像素的灰度會發生劇烈變化。通過圖3(b)可知,在中心線穿過像素點的灰度直方統計圖中出現了多個峰值,因此設定中線穿過的像素直方統計圖中最大峰值所代表的灰度值為T,設定該興趣區電力線灰度值范圍為[T-30,T+30],延電力線中線方向上連續3及以上的像素超出該范圍即判定為異物上像素點,最終獲取異物像素點坐標,判斷結果如圖3(c)所示。
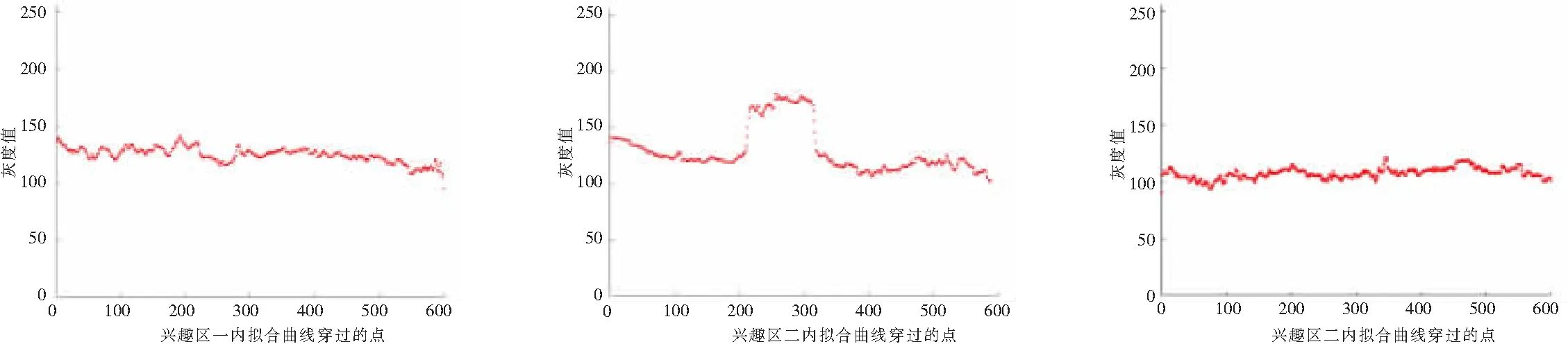
(a)各中心線經過像素點灰度值
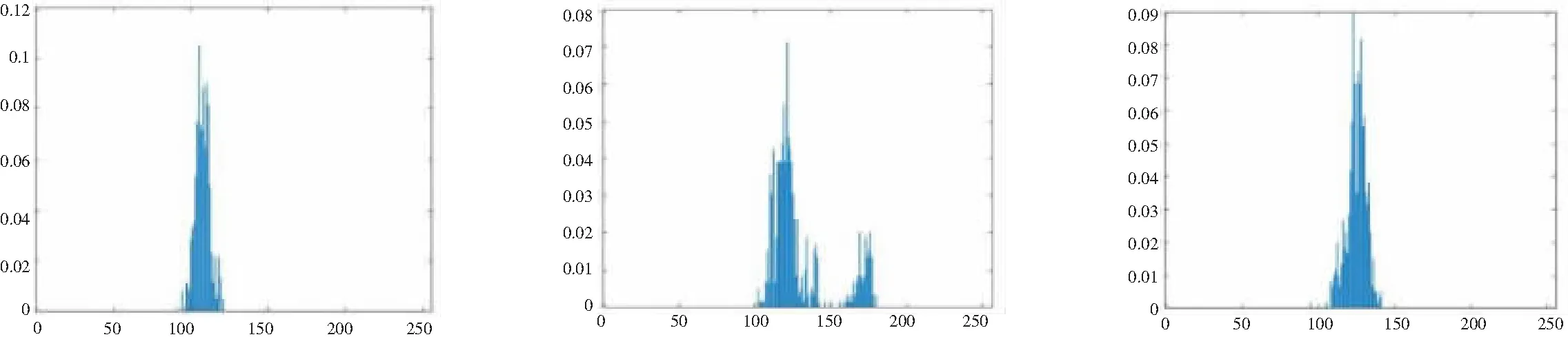
(b)各興趣區輸電線中心線穿過像素值圖與灰度直方統計圖
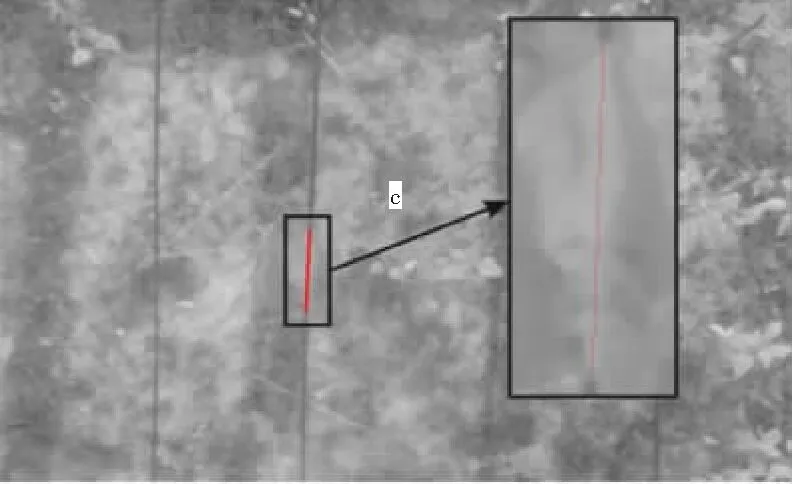
(c)獲取顯著異物點
中值濾波公式如下:
g(x,y)=Med{f(x-k,y-i),(k,i∈W)}
(4)
式中:g(x,y)為中值濾波處理后的圖像,Med為動態窗口中像素中值,f(x,y)為原始圖像,W為選定的二維模板。
灰度值公式:
gray=0.299R+0.587G+0.114B
(5)
式中:gray為灰度值,R為紅色像素值,G為綠色像素值,B為藍色像素值。
3.2 灰度相似性異物點判定
通過灰度顯著性判斷能夠排除與電力線顏色相差較遠的異物,但有些異物與電力線顏色相接近,因此異物處灰度值沒有較大的突變。灰度顯著性異物提取方法只能對灰度值相差30以上的異物進行了檢測。本文利用歐式距離法判斷灰度相似性異物,首先進行二值化,將電力線[T-30,T+30]范圍內的像素值設定為1,其他像素值為0。然后進行連通域搜索,對圖像像素從左到右、從上到下進行遍歷。直到遍歷完整個圖像,并去除電力線中線不經過的連通域,達到濾除興趣區內與電力線相似噪聲目的。最后,用歐式距離遍歷連通域像素點與擬合電力線中心線的距離,求出每個點到電力線中心線的最短歐式距離,設定所有最短距離平均值2.5倍以上為異常點,記錄所判定的異常點的坐標,判定結果如圖4所示。
歐式距離公式:
(6)
式中:f(d)為最短距離,aj為所有像素點坐標,bi為電力線中心線穿過的電力線。
4 基于RCF網絡模型結合區域生長算法獲取異物輪廓
通過上述方法判斷了輸電線上是否有顯著性異物,為了對目標物體進行精準定位,需要得到目標物體的輪廓信息。本文利用更豐富的卷積特征(RCF)的精確邊緣檢測器提取圖像內整體邊緣[14],

(a)異物相似圖像興趣區

(b)獲取相似異物點
該方法能夠大幅度減少數據量, 在保留重要結構屬性的同時, 剔除弱相關信息。
將BSDS500數據集[15]作為訓練數據,它是一種應用廣泛的邊緣檢測數據集,由200幅訓練圖像、100幅驗證圖像和200幅測試圖像組成。RCF網絡結構是通過修改 VGG16 網絡結構得到的,RCF網絡舍去所有的全連接層和第5個池化層之后,在每一階段卷積后都設立一個Elewise相加圖層,將該階段所有圖層相加融合,之后,RCF網絡將每個階段的累加圖層融合,進行損失函數計算,這一改進使得RCF網絡具有了混合輸出,可以充分利用語義信息和良好的細節要素來進行邊緣檢測。圖5顯示了電力線異物圖像在RCF模型中從上到下每個階段的輸出[16]。
RCF網絡模型在設計損失函數時,將數據集中的每張圖像,根據人工標記結果,產生一張邊緣概率圖,范圍從0到1。0表示在這個像素上沒有人標記為邊緣點,1表示在這個像素上所有人都標記為邊緣點,將像素點分為正樣品點和負樣品點。
損失函數為:
(7)
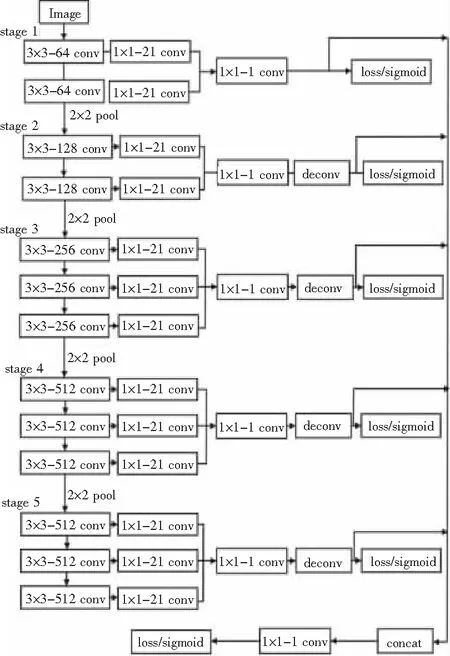
圖5 RCF網絡模型圖

使用訓練好的RCF的網絡模型對原圖進行邊緣檢測,獲取整張像中整體邊緣,以灰度顯著性或灰度相似性獲取的異物點作為種子區域生長點的種子來進行生長。按照規定的生長準則逐步將種子點與一定領域內符合生長條件的像素合并成一個子區域,這個子區域繼續以該生長條件在一定領域內生長,直到滿足生長條件為止,即獲取了興趣區內種子點在一定領域下迭代出的完整且獨立的一個連通域[15,17]。
對于灰度圖而言,生長準則一般設定為某個固定灰度閾值T,若種子像素與其鄰域像素之間的灰度差小于T,則將其鄰域像素納入目標區域。即:
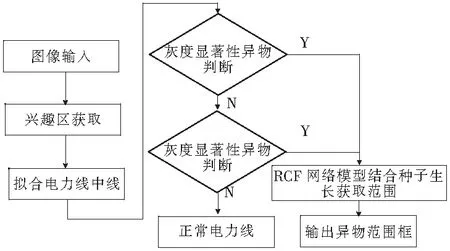
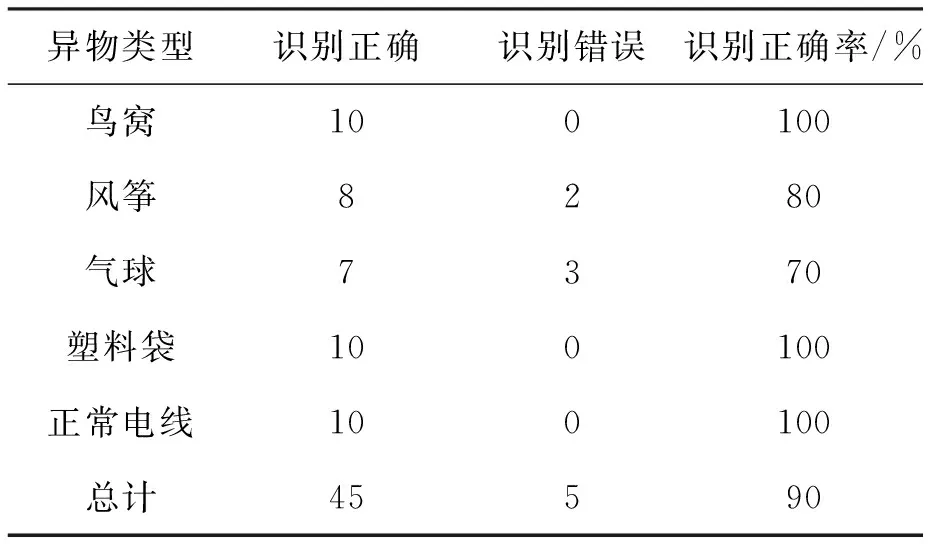
A[n]={(i,j)abs(g(x,y)-g(i,j)) |i-x|≤1,|j-y|≤1 (8) 其中:A[n]為目標區域,g(x,y)為種子像素,g(i,j)為g(x,y)領域像素。 具體步驟:1)使用BSDS500數據根據RCF網絡結構進行訓練;2)使用訓練好的模型對圖像進行邊緣檢測;3)對于顯著性異物,使用灰度顯著性異物點的作為種子點;4)對于顯著性異物,使用灰度相似性異物點的中心點作為種子生長點;5)種子生長點利用公式(8)進行區域生長,灰度差T設定為30并對生長出的區域進行范圍框標記,結果如圖6所示。 (a) 灰度顯著圖種子區域檢測 (b) 灰度相似圖種子區域檢測 利用本文算法對灰度顯著性異物與灰度相似性異物兩類圖像進行處理。在電力線中線的基礎上利用灰度值的顯著性與相似性達到了電力線異物的完整提取,具體流程如圖7。 圖7 算法流程圖 為驗證本文異物識別算法的泛化能力, 選取50張樣本,其中常見的異物樣本鳥窩、風箏、氣球、塑料袋各10張,不含異物的樣本10張,將所有樣本進行處理后識別并統計誤識率,誤識率表達式為 (9) 式中:Mr為誤判率;Nerror為被錯誤分類的樣本數;Nsum為樣本總數量。 表1 誤檢識別率 通過批量實驗發現,本文算法對鳥窩、塑料袋與電力線有較大的物理接觸的情況下檢測效果較好,但對于有些氣球、風箏與電力線之間只靠一根細線懸掛,從圖像中看幾乎無物理接觸的情況下不能將異物檢測出來。原因是由于在該類情況下,順著電力線中線的方向上檢測不到灰度突變像素點,或存在1~2個突變像素點在濾波過程中被濾除。 本文提出了一種基于電力線中線的異物提取的新方法,實現了對不同顏色的電力線異物進行提取,該方法在事先檢測到的輸電線路興趣區域內根據灰度圖像的顯著性與相似性,利用顏色和位置的特性獲取電力線上異物點位置。相比于傳統的異物檢測方法,該方法對于電力線顏色相近的異物也能夠提取出來,具有很好的實時性,并且提取出的異物具有較好的完整性。通過無人機采集的輸電線路圖像驗證了該方法能有效提高對電力線異物提取可靠性,但驗證數據較少。下一步擬打算收集大量電力線異物圖像進行驗證并且摸索針對細線懸掛異物的方法,提高異物識別準確率。
5 實驗驗證與批處理驗證
6 結論