
基于滑模理論的燃氣輪機控制系統容錯控制方法研究
2022-05-08 07:15:08劉玉珍
現代工業經濟和信息化 2022年3期
劉玉珍
(華北電力大學,北京 102206)
引言
燃氣輪機作為旋轉葉輪式熱力發動機,在現代工業領域是一種十分重要的能量轉換和傳遞裝置[1],在飛機、艦船等航天領域及發電等行業有廣泛應用。發電用燃氣輪機的控制系統規模大、參數多且結構復雜。燃氣輪機正常運行過程時,與發電廠汽輪機相同的是,內部有高溫高壓的氣體;為了與電網頻率相匹配,它同時也具有很高的轉速;由于其高出力,機械應力及其熱應力也很高。以上可以看出,燃氣輪機工作環境較惡劣,它還可能會遭受周圍環境的污染。在這種情況下,它的主要部件會隨著運行時間的增加產生各種各樣的性能衰退或損傷,如污垢、泄漏、腐蝕、熱畸變和外來物損傷等[2],并易引發各種嚴重的故障發生,任何一個局部的故障就可能引起機組的安全性事故甚至導致整個系統的崩潰,造成巨大的經濟損失。故我們必須在系統故障時及時進行控制系統的故障診斷與隔離,確保系統具有一定的故障應對能力,從而最大限度保證機組的安全平穩運行。因此,容錯控制系統對于將來燃氣輪機控制系統的發展具有舉足輕重的重要意義[3]。相較于一般控制系統,容錯控制系統具有更快地對故障反應速度,也具有更可靠的故障處理能力,進而保障系統在故障下仍能在允許性能范圍內運行。
1 燃氣輪機控制系統建模
典型的燃氣輪機主體主要由五部分組成,即壓氣機、燃燒室、透平、回熱器和轉軸,透平即與發電機直接相連的動力渦輪機。燃氣輪機發電過程簡單來說就是空氣經壓氣機壓縮到一定壓力后被送入燃燒室,再與燃料混合并在燃燒室中充分燃燒,產生的高溫高壓的燃氣,再進入透平中膨脹完成做功過程,進而完成由熱變功的熱力循環。做完功的乏氣排入回熱器,用來預熱從壓氣機進入燃燒室的空氣,從而可以降低燃燒過程中所需的燃料量,提高系統燃燒效率。透平中所產生的功一部分是用于驅動壓氣機,其余部分用來帶動負載,即帶動與燃氣輪機同軸的發電機發電。
參照燃氣輪機實際物理過程我們可以得到以下微分方程:
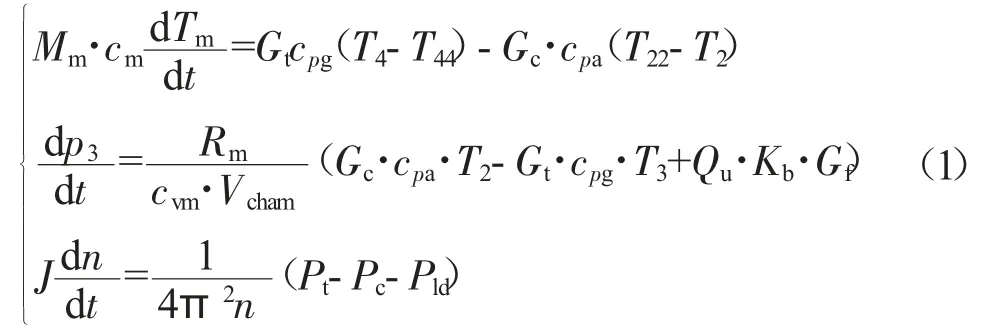
式中:Mm為回熱器參與空氣與乏氣換熱的金屬質量;cm為回熱器金屬壁面的比熱容;Tm回熱器金屬壁面的平均溫度;Gt為透平的質量流量;cpg為燃氣的定壓比熱;T4為透平排氣總溫;T22、T44分別為回熱器冷端、熱端排氣溫度;Gc為壓氣機的質量流量;cpa為空氣的定壓比熱;T2為壓氣機出口總溫;p3燃燒室內部壓強;Rm燃氣平均氣體常數,J/kg;cvm為燃燒室內氣體平均定容比熱容;T3燃燒室內部溫度,℃;Qu為燃料低發熱量;Kb為燃燒室燃燒效率;Gf燃燒室的質量流量;n 為轉子轉速;Vcham為燃燒室容積,m3;J是轉子的轉動慣量,kg·m2;Pt為透平輸出功率,kW;Pc為壓氣機消耗的功率,kW;Pld負載功率,kW。
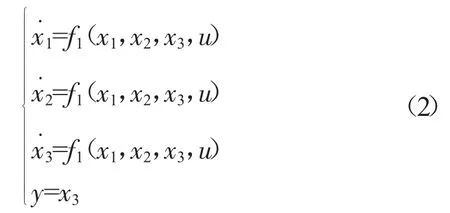
基于30 kW 微型燃氣輪機的工況[4],并基于以上非線性化模型,我們選取狀態變量如下:回熱器金屬壁面的平均溫度,透平入口壓強,(兩者均為滯止參數),轉速n。控制輸入變量為燃料質量流量Gf。輸出變量y 為轉速n,即y=x3=n。
利用下式進行線性化:
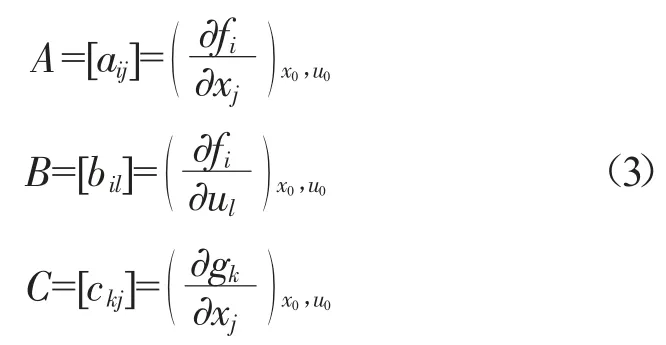
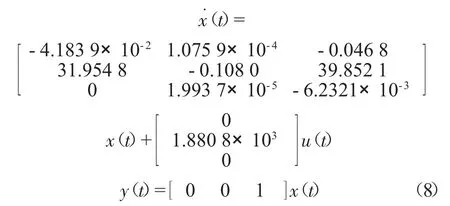
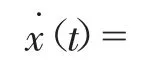
我們考慮燃氣輪機機組在額定工況下即輸出功率為30 kW 工況下的線性化模型,可得P=30 時線性化模型的系統矩陣A,控制矩陣B和輸出矩陣C,即

系統的狀態空間表達式為:
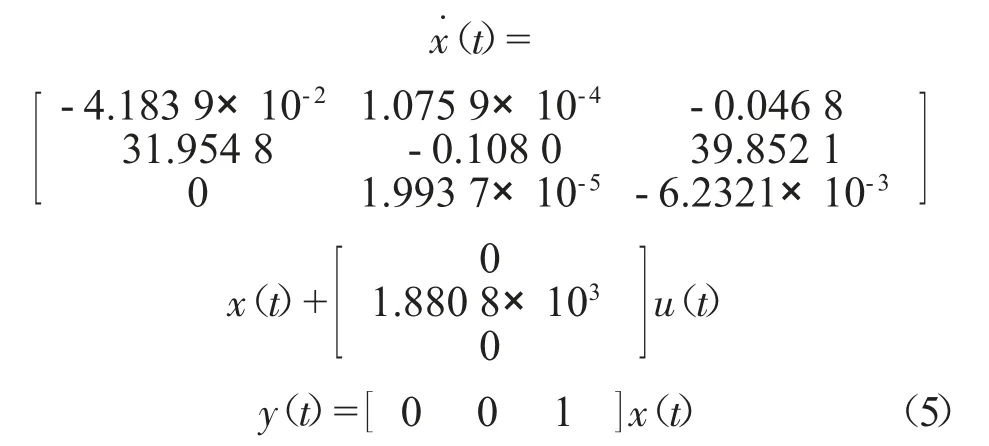
至此,燃氣輪機控制系統的線性化模型建立完成,簡單且清晰地表示了燃氣輪機各參數之間的關系,便于在此基礎上應用現代控制理論進行容錯控制的分析。
2 滑模容錯方案
滑模控制(Sliding Mode Control,SMC),也叫變結構控制,其本質上是一類特殊的非線性控制,且非線性表現為控制的不連續性。這種控制策略與其他控制的不同之處在于系統的“結構”并不固定,而是可以在動態過程中,根據系統當前的狀態(如偏差及其各階導數等)有目的地不斷變化,迫使系統按照預定“滑動模態”的狀態軌跡運動。由于滑動模態可以進行設計且與對象參數及擾動無關,這就使得滑模控制具有快速響應、對應參數變化及擾動不靈敏、無需系統在線辨識、物理實現簡單等優點。滑模控制首先要構造滑模面。
下述滑模理論與狀態反饋相結合的理論過程:
滑模控制首先要構造滑模面,讓系統狀態按照構造的滑模面來運動。
現構造以下滑模面,以與狀態反饋相結合:
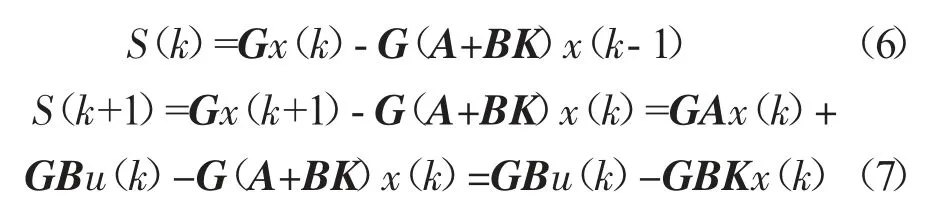
令S(k+1)=0,即可構造出滑模面。A,B矩陣分別為離散模型的系統矩陣與控制輸入矩陣。
我們定義矩陣G=B+-Y1(In-BB+),可以證明GB=I,將該式代入上面的S(k+1)=0,我們可得到S(k+1)=u(k)-Kx(k)=0,故應有u(k)=Kx(k),因此得出這個表達形式之后要想讓系統有較好的相應性能,需要對K即狀態反饋增益陣進行極點配置,使得系統故障后仍能有較好的性能指標,結構圖見圖1。
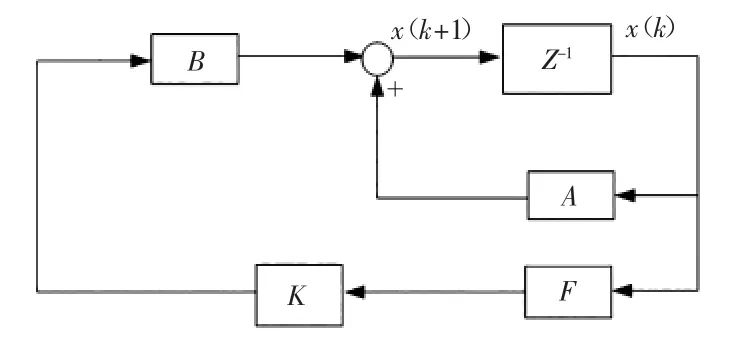
圖1 狀態反饋系統結構圖
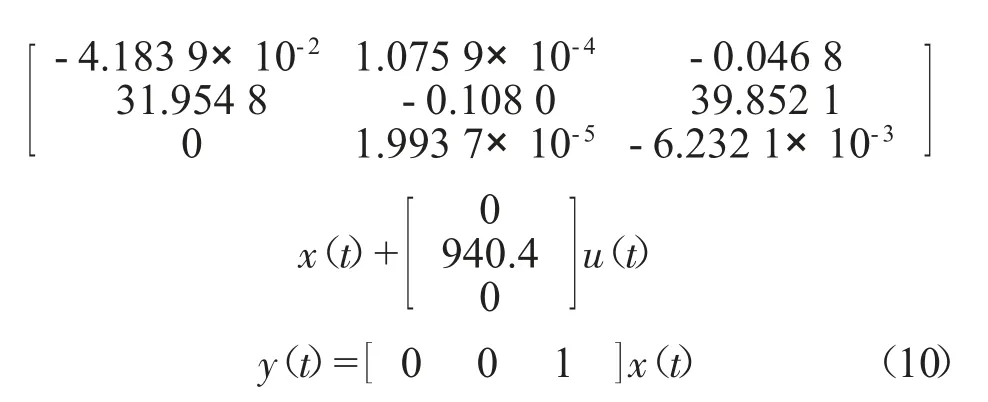
原系統狀態空間表達式為
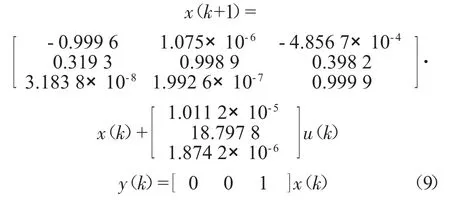
離散化后的模型為
我們考慮系統的恒增益故障,得到故障系統的線性連續定常模型的狀態空間表達式,即:
它離散化后的模型為
此時故障模型中我們定義各矩陣分別是G、h和C。
下面我們利用能控判定陣M=[h,Gh,G2h]來對故障后的系統進行能控性判別,通過使用Matlab 中的rank 函數求得M為滿秩矩陣,即rank(M)=3。故我們可以得出該系統是完全能控的。所以我們可以利用狀態反饋即設計狀態反饋來進行任意極點配置。
經過對正常運行和故障時的離散狀態空間表達式的特征值的驗證,兩者的特征值相同,且都在單位圓內,系統仍穩定;進一步對傳遞函數進行驗證,兩者的零點不同,故障后的零點在連續模型中數值變小,且傳遞函數比例增益也變小;在離散模型中其極點變小,增益也變小,故會使得系統響應變慢。因此,我們應通過狀態反饋重新配置極點來加快故障后系統的響應,使系統響應加快得到優化。
我們希望通過極點配置令達到故障前或者比故障前更好的輸出響應。通過Matlab 仿真我們找到了效果較好的配置極點,即(-0.7,-0.8,-0.9),此時的狀態增益矩陣為K=[-1.463 3×109,0.271 9,7.897 8×109]。
3 仿真驗證
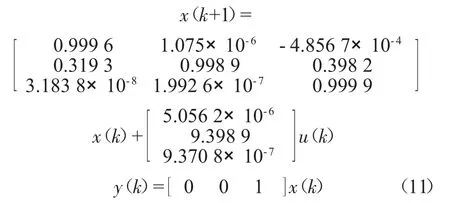
故障后加入狀態反饋增益陣仿真效果如圖2所示。
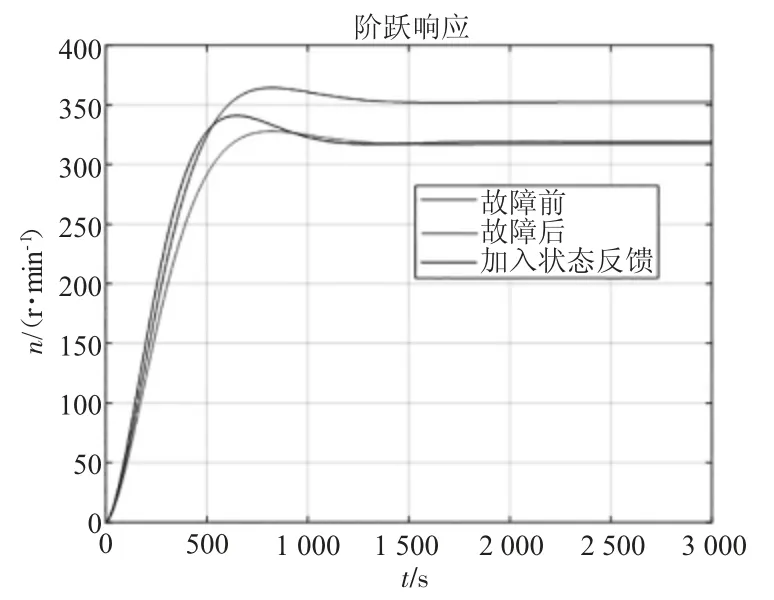
圖2 系統故障前后及加入狀態反饋后響應曲線
由圖2 可以看出,經過極點配置之后,系統的階躍響應較之前反應快,優化了系統的響應性能,且更接近故障前系統的響應。
4 結論
設計了基于滑模理論的狀態反饋控制器,在燃氣輪機模型上進行了無故障與故障狀態下的仿真,實現了對燃氣輪機容錯控制策略的研究,利用了基于滑模的容錯控制方法優化了系統的響應性能。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
汽車維護與修理(2016年10期)2016-07-10 08:17:41
