音叉振動電容式表面電位測量裝置設計
2022-05-09 07:53:04于海軍赫偉東孫迎萍張海燕
航天器環境工程 2022年2期
于海軍,王 鹢,赫偉東,孫迎萍,張海燕
(1. 蘭州空間技術物理研究所 空間環境材料行為及評價技術重點實驗室,蘭州 730000;2. 中國電子科技集團公司第四十九研究所,哈爾濱 150028)
0 引言
航天器在軌運行期間,其表面介質材料與空間等離子體相互作用,會在航天器表面產生凈電荷積累。當表面電位升高到一定量值后,將以靜電放電形式或通過衛星結構、接地系統注入到衛星電子系統中,對星上電子系統造成影響,甚至威脅衛星安全。因此,在衛星設計中,有必要進行表面電位的檢測和控制。
20 世紀七八十年代,NASA 和ESA 的多顆衛星都搭載了表面電位檢測載荷,采用的是振動電容式電位測量裝置,其振動機構為音叉式驅動機構。國內的衛星表面電位檢測多采用電容分壓式電位測量裝置,少部分為振動電容式的,振動機構為動圈或壓電堆棧式驅動機構;研究中采用的傳統理論計算方式僅適用于簡單理想模型,對于復雜的工程應用有局限性。
鑒于以上情況,本文開展適合工程應用的音叉式振動機構研制,提出基于電荷感應與靜電場仿真的電位測量裝置設計方法,并對樣機進行標定實驗以驗證設計的正確性。
1 振動電容式表面電位檢測儀工作原理
振動電容式表面電位檢測儀的工作原理如圖1所示:采用周期性振動的電極(感應電極)對被測介質的電位進行感應,由于電極與被測介質之間的電容隨著振動發生周期性變化,電極上會輸出周期變化的電流信號;以振動頻率為參考信號對該電流信號進行峰值提取再放大、檢波后,即可得到與被測介質表面電位成正比的電壓信號,從而實現介質表面電位的檢測。
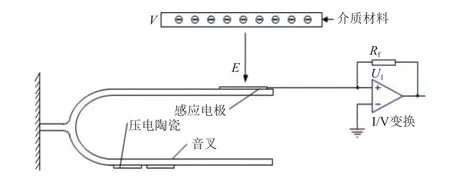
圖1 振動電容式表面電位檢測儀工作原理示意Fig. 1 Principle of vibration capacitance surface potential detector
圖1 中介質材料為衛星表面熱控材料,受空間等離子體環境影響表面產生電荷積累,電荷所形成的電場能夠作用于周期性振動的感應電極。感應電極上產生的電流信號可表示為
2 音叉振動系統設計
音叉振動系統作為感應電極的驅動組件,也是電容式表面電位檢測儀傳感器的核心組件,用來控制音叉帶動感應電極振動,并使其振幅及振動頻率穩定。由式(2)可知,只有當音叉振動幅值穩定時,感應電極輸出的電流才能穩定,電流與被測電位呈線性關系。
2.1 音叉結構設計
根據表面電位檢測儀工作原理,音叉結構設計要求包括以下3 點:
1)感應電流靈敏度與感應電極振動頻率成正比,因此要求音叉工作頻率盡量高;
2)音叉振幅決定感應電極的上、下極限位置,而極限位置高度差與電場強度差成正比,因此要求振幅盡量大;
3)在音叉振動過程中,感應電極整體移動,不存在繞感應電極中心轉動的運動形式,因此只能選擇1 階或2 階振型。
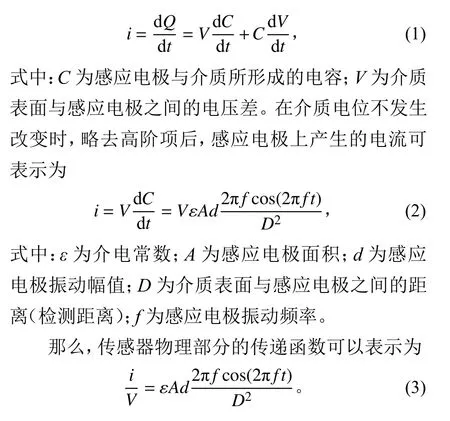
圖2 所示為音叉結構,2 塊壓電陶瓷片(PZT)分別粘貼在叉體上,一片將電能轉換為機械能驅動音叉振動,另一片將音叉振動產生的機械能轉換成電信號反饋輸出給音叉振動控制系統,音叉根部導線作為公共端(接地)。感應電極粘貼在音叉臂上,并與音叉基體絕緣。在激勵音叉振動時,當輸入信號的頻率和音叉的固有頻率相等時,音叉即產生諧振,獲得最大振幅。
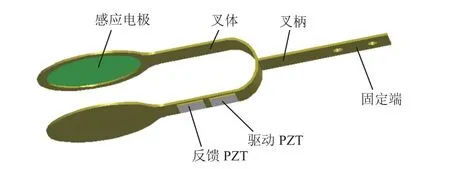
圖2 音叉結構Fig. 2 Structure diagram of tuning fork
綜合以上設計要求和構型,建立音叉的仿真模型,得到其1~6 階振型如圖3 所示。結合不同材料音叉的振動仿真結果(見表1),將振幅與振動頻率乘積最大作為選擇依據,確定選用不銹鋼材料的2 階振型音叉。
圖3 音叉振型Fig. 3 Mode of vibration of the tuning fork

表1 音叉性能仿真結果Table 1 Simulation results of the performance of the tuning fork
2.2 控制系統設計
音叉驅動控制系統是一個閉環自動控制系統,如圖4 所示,反饋壓電陶瓷片拾取音叉振動的信號作為反饋信號輸入控制系統,輸入信號為交變正弦信號
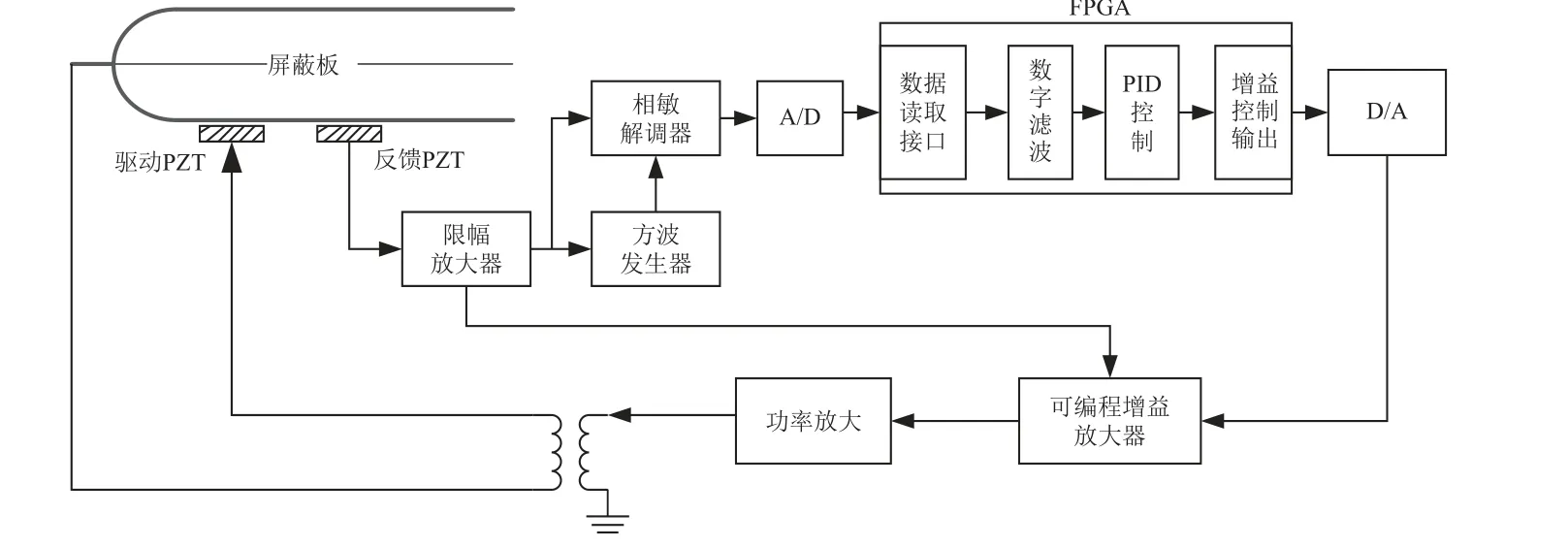
圖4 音叉穩幅振動控制系統原理Fig. 4 Principle of vibration control system for stabilizing the amplitude of the tuning fork

式中:為振幅;為音叉諧振角速率;Δ為漂移頻率。信號經過限幅放大電路后,二極管橋路組成的方波發生電路產生一個類方波信號作為后級解調器的輸入;相敏解調器將檢出輸入正弦信號峰值通過A/D 轉換后輸入到FPGA;FPGA 首先采用數字濾波器對輸入信號進行濾波,通過PID 控制將振動反饋電壓幅值控制在穩定值水平,然后經過D/A 轉換后輸入到可編程增益放大器,控制增益的大小,最后通過功率放大器和變壓器將電壓調整到穩定驅動電壓,進而驅動音叉穩幅振動。
3 傳感器靈敏度及精度分析
3.1 靈敏度分析
由式(3)可以看出,表面電位檢測儀的傳感器靈敏度與檢測距離的平方成反比,與感應電極面積、振幅、振動頻率成正比;和由音叉特性決定,不再討論。圖5 為傳感器靈敏度與感應電極半徑和檢測距離的關系,可以看出,在為定值條件下,對傳感器靈敏度的影響較大。
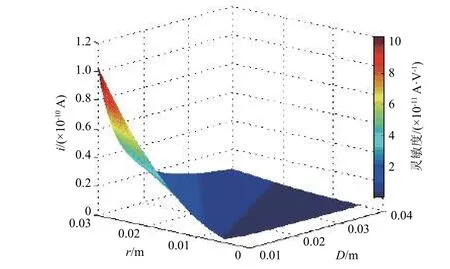
圖5 傳感器靈敏度影響因素分析Fig. 5 Analysis of factors affecting the sensor sensitivity
將感應電極半徑設為 10 mm,檢測距離設為 28 mm,并根據第 2.1 節的音叉設計結果,設定音叉振幅為 124 μm,振動頻率為 528 Hz,則當被測電位分辨率要求為 1 V 時,需要對感應電流幅值的測量精度達到 1.45 pA,傳感器物理部分的靈敏度為/=1.45×10A/V。
提高傳感器靈敏度的措施包括:增大感應電極振幅和振動頻率;根據傳感器尺寸,在可制造范圍內增大感應電極面積;根據測量范圍,在保證安全間距條件下減小檢測距離。
3.2 精度分析
物理部分和前端檢測電路都會影響傳感器的檢測精度。
物理部分中,檢測距離、感應電極面積為幾何尺寸,在傳感器裝配完成后即認為確定不變,其誤差通過后期標定可以補償;音叉振幅、振動頻率為動態變化量,其中可通過電路檢測在線讀取,而無法在線獲取,因此需盡量控制振幅的溫漂、時漂來提升傳感器檢測精度。
前端檢測電路精度主要取決于電路噪聲,降低噪聲、提高信噪比可以提升傳感器檢測精度。
4 靜電場仿真分析
本文根據傳感器的工作原理及結構特點,采用COMSOL 軟件建立其仿真模型,因傳感器為軸對稱結構,將仿真模型簡化為取對稱軸1/2 的二維平面模型,如圖6 所示,感應電極、音叉、殼體及輸入電極材料為鋁合金;被測介質材料為聚酰亞胺(模擬衛星表面熱控包覆層),與輸入電極直接貼覆;音叉、殼體接地電位,被測介質接被測電位。
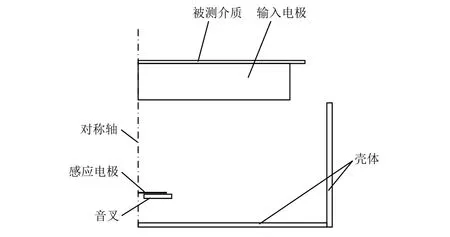
圖6 傳感器仿真模型Fig. 6 Simulation model of the sensor
根據電荷感應原理,感應電極上產生的感應電荷為

式中:為感應電極處的電場強度;為感應電極的面積;為介電常數。將感應電極振動時的上、下2 個極限位置作為研究對象,對感應電極在振幅上、下限分別設定2 次仿真計算,并求得感應電極面積上的電場強度積分,得到這2 個位置感應電極上的感應電荷分別為和,則感應電流可由=和=計算得到:

根據傳感器設計結果設定音叉振幅為124 μm,振動頻率為528 Hz,檢測距離為28 mm,感應電極半徑為10 mm,被測介質電位為-2000 V 條件下的靜電場仿真結果如圖7 所示,其中橫坐標為傳感器徑向,縱坐標為傳感器軸向。根據仿真派生值得到感應電流峰值為2.68×10A(得出傳感器物理部分的靈敏度為1.34×10A/V),與本文理論計算得到的傳感器物理部分的靈敏度1.45×10A/V基本吻合。可見仿真結果與理論計算結果一致性較好,說明本文提出的基于電荷感應與靜電場仿真方法設計電位測量裝置可行。
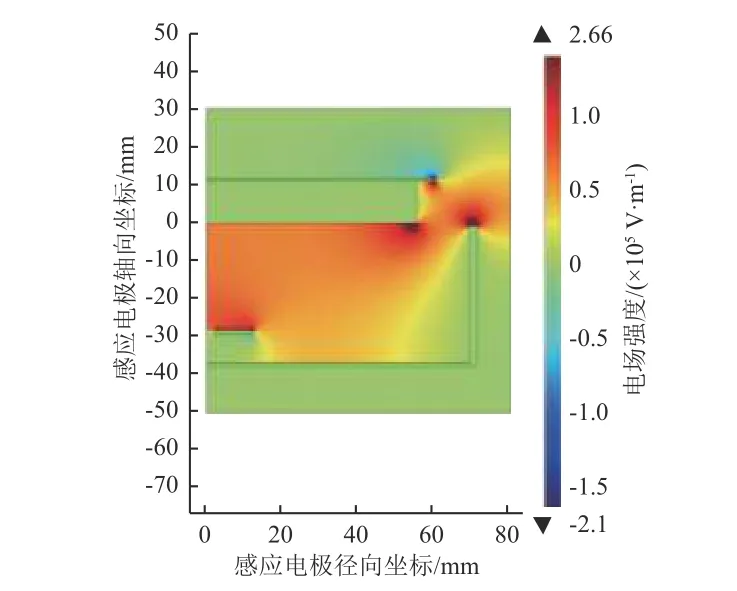
圖7 靜電場仿真結果Fig. 7 Cloud diagram of the electrostatic field
圖8 為向電場強度在對稱軸上的變化情況,感應電極在-軸上的位置為28 mm,此處曲線斜率較大,電場強度隨變化較快,即電場強度的變化率較大,在同等音叉振動條件下,傳感器靈敏度較高。
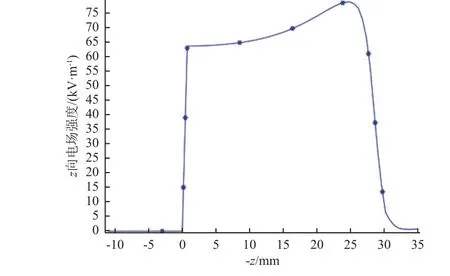
圖8 z 向電場強度在對稱軸上的變化情況Fig. 8 Variation of z-direction electric field intensity on the axis of symmetry
圖9 為音叉振動的上、下兩極限位置處,感應電極上向電場強度的徑向分布情況,上、下極限位置產生感應電荷的差隨時間的變化即為感應電流。
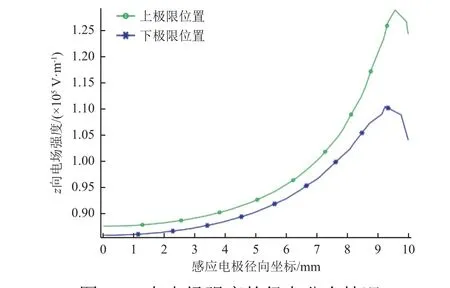
圖9 z 向電場強度的徑向分布情況Fig. 9 Radial distributions of z-direction electric field intensity
圖8 和圖9 分別給出了傳感器軸向和感應電極徑向的電場強度分布情況,可見,感應電極的軸向位置和徑向尺寸對傳感器靈敏度有較大影響。
5 標定實驗驗證
根據音叉設計結果,研制了表面電位檢測儀實驗樣機并進行桌面標定測試。標定原理為將傳感器輸入電極與高壓直流電源連接,采用高壓直流電源作為標準電位對傳感器進行0~3000 V 范圍標定。
音叉起振后,將感應電極產生的感應電流與前端檢測電路連接,經I/V 變換后得到的峰值電壓作為傳感器輸出電壓。標定結果如圖10 所示,其中橫坐標為標準電位,縱坐標為傳感器輸出電壓,檢測電路的等效電阻為1 GΩ。結合標定曲線,得出傳感器物理部分的靈敏度為5.73×10A/V,且傳感器線性度較好。考慮到傳感器樣機加工和裝配誤差,可以認為實驗結果與理論計算、仿真結果基本相符。且傳感器的制造誤差隨著樣機組裝完成即被確定,可通過標定實驗修正,不會影響電位檢測結果。
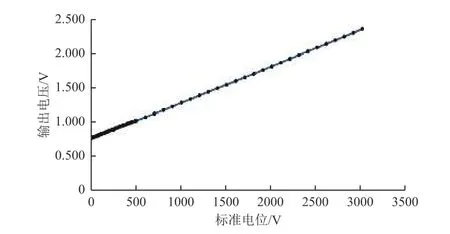
圖10 樣機標定結果Fig. 10 Calibration result for the prototype
6 結束語
本文對振動電容式衛星表面電位檢測儀的核心部件——振動音叉進行詳細設計,確定了音叉結構參數及驅動方式;通過分析表面電位檢測儀傳遞函數,得出了傳感器靈敏度及精度影響因素;提出了基于電荷感應與靜電場仿真的電位測量裝置設計方法,得到的傳感器靈敏度與理論計算結果量級內一致,最終樣機標定實驗結果與傳感器設計要求相符。
音叉式振動電容表面電位檢測裝置解決了電容分壓檢測中存在的漏電流問題,提高了檢測精度;但其在軌長時間工作時可能發生音叉振幅漂移問題,有待后續從音叉材料工藝或傳感器設計方面繼續開展研究。
[1]程炳鈞, 王斌, 周斌, 等. 非接觸式表面電位探針設計與研制概述[J]. 航天器環境工程, 2013, 30(1): 87-90 CHENG B J, WANG B, ZHOU B, et al. Design and implementation of non-contact surface potential probe[J].Spacecraft Environment Engineering, 2013, 30(1): 87-90
[2]代銀松, 張希軍, 羅健峰, 等. 航天器帶電及其表面電位主動控制技術發展現狀[J]. 軍械工程學院學報, 2017,29(1): 32-37 DAI Y S, ZHANG X J, LUO J F, et al. Present situation of active control technologies concerning spacecraft charging and its surface potential and their developments[J]. Journalof Ordnance Engineering College, 2017, 29(1): 32-37
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
