煤礦膠帶運(yùn)輸系統(tǒng)優(yōu)化控制分析
2022-05-10 09:18:22吳震
汽車實(shí)用技術(shù) 2022年8期
關(guān)鍵詞:煤礦
吳 震
(重慶工商職業(yè)學(xué)院 智能制造與汽車學(xué)院,重慶 401520)
我國煤炭資源豐富,目前大型煤礦開采大多依靠煤礦膠帶運(yùn)輸機(jī)把開采的煤炭運(yùn)輸?shù)降孛妗kS著煤炭開采技術(shù)的日益提高,煤炭開采量巨大,對(duì)膠帶運(yùn)輸機(jī)的要求也越來越高。目前煤礦膠帶運(yùn)輸機(jī)大多具有運(yùn)輸距離長(zhǎng)、功率大、速度高的特點(diǎn),所以煤礦膠帶運(yùn)輸機(jī)使用能量較多。又由于目前很多煤礦膠帶運(yùn)輸機(jī)的控制相對(duì)簡(jiǎn)單,無論負(fù)載情況,只是按照設(shè)定的一個(gè)恒定速度運(yùn)行,存在大量的能源浪費(fèi)情況,并且設(shè)備在有無負(fù)載的情況都處于運(yùn)行狀態(tài),也增大了設(shè)備的損耗。目前,亟需對(duì)落后的膠帶運(yùn)輸系統(tǒng)進(jìn)行優(yōu)化控制,達(dá)到節(jié)約能源、延長(zhǎng)設(shè)備使用壽命、減少故障發(fā)生的目的。
本文將設(shè)計(jì)一套對(duì)煤礦膠帶運(yùn)輸機(jī)的優(yōu)化控制方案,首先對(duì)煤礦膠帶運(yùn)輸機(jī)的負(fù)載、電流、電壓等數(shù)據(jù)進(jìn)行實(shí)時(shí)監(jiān)測(cè),并且把相應(yīng)數(shù)據(jù)數(shù)據(jù)反饋到控制系統(tǒng)的輸入端,通過智能算法對(duì)相應(yīng)數(shù)據(jù)進(jìn)行分析和處理,來調(diào)節(jié)膠帶運(yùn)輸機(jī)的運(yùn)輸速度,實(shí)現(xiàn)負(fù)載大快速運(yùn)行、負(fù)載小慢速運(yùn)行、空載不運(yùn)行的效果,并且本文將開發(fā)上位機(jī)監(jiān)測(cè)軟件,通過本地客戶端和遠(yuǎn)程客戶端能夠監(jiān)測(cè)到膠帶運(yùn)輸機(jī)的運(yùn)行情況。
1 煤礦膠帶運(yùn)輸機(jī)基本結(jié)構(gòu)與節(jié)能分析
1.1 煤礦膠帶運(yùn)輸機(jī)結(jié)構(gòu)
根據(jù)煤礦井下煤炭開采運(yùn)輸?shù)膶?shí)際需要,膠帶運(yùn)輸機(jī)應(yīng)具有驅(qū)動(dòng)運(yùn)輸、制動(dòng)、改向、裝料、卸料、張緊、清掃等功能。基于這些基本功能需要,膠帶運(yùn)輸系統(tǒng)的基本結(jié)構(gòu)一般具有驅(qū)動(dòng)電機(jī)、托輥、皮帶、支架等部分起到支撐和運(yùn)輸煤炭的作用;具有轉(zhuǎn)向裝置用來改變膠帶運(yùn)輸系統(tǒng)的運(yùn)輸方向;具有張緊裝置起到驅(qū)動(dòng)電機(jī)帶動(dòng)皮帶運(yùn)行,并防止皮帶打滑和撕裂;具有裝料和卸料裝置,用來把開采的煤炭放置到皮帶上且運(yùn)輸?shù)侥康牡睾竽軌蛲ㄟ^卸料裝置把煤炭從皮帶上卸下。同時(shí),為了保障皮帶運(yùn)輸系統(tǒng)安全運(yùn)行減少故障,并為安全監(jiān)測(cè)和智能控制提供數(shù)據(jù),一般會(huì)根據(jù)需要在膠帶運(yùn)輸系統(tǒng)中安裝傳感器來監(jiān)測(cè)其運(yùn)行狀況并進(jìn)一步實(shí)施智能控制。單級(jí)膠帶運(yùn)輸機(jī)的整體結(jié)構(gòu)如圖1所示。

圖1 單級(jí)膠帶運(yùn)輸機(jī)的整體結(jié)構(gòu)圖
1.2 煤礦膠帶運(yùn)輸系統(tǒng)節(jié)能分析
膠帶運(yùn)輸機(jī)運(yùn)行時(shí)的阻力主要包含由托輥、皮帶、煤料產(chǎn)生的摩擦力,這個(gè)主要阻力和這幾部分之間的摩擦系數(shù)、皮帶的長(zhǎng)度、皮帶的重量、煤料在皮帶上的分布情況和重量、膠帶運(yùn)輸機(jī)運(yùn)行時(shí)的傾斜角度都有關(guān)系,主要阻力通過力學(xué)公式計(jì)算可得。除了主要阻力外,由于煤料放置到皮帶上時(shí)會(huì)產(chǎn)生慣性和摩擦阻力、驅(qū)動(dòng)電機(jī)軸承偶然的阻力、皮帶的纏繞阻力等,膠帶運(yùn)輸機(jī)運(yùn)行時(shí)還會(huì)產(chǎn)生附加阻力。由于清掃皮帶、卸料摩擦、托輥前傾、煤料與導(dǎo)槽之間摩擦等因素影響,膠帶運(yùn)輸機(jī)運(yùn)行時(shí)還會(huì)產(chǎn)生特種阻力。另外,膠帶運(yùn)輸機(jī)向上提升或向下運(yùn)輸煤料時(shí),膠帶運(yùn)輸機(jī)還會(huì)產(chǎn)生傾斜阻力。這些阻力可以通過具體的公式和經(jīng)驗(yàn)大致計(jì)算得到,進(jìn)一步控制影響這些阻力因素,來達(dá)到節(jié)能的目的。
理想狀況下,膠帶運(yùn)輸機(jī)皮帶上的煤料填充率為100%,其阻力為額定阻力,運(yùn)行速度為額定速度,這時(shí)節(jié)能效果最佳。但是由于煤炭開采的不確定性,無法保證每時(shí)每刻皮帶上煤料的填充率為100%。這時(shí),就考慮對(duì)皮帶上煤料的填充率進(jìn)行監(jiān)測(cè),使得皮帶上煤料填充率與膠帶運(yùn)輸機(jī)運(yùn)行速度正相關(guān)。當(dāng)空載時(shí)膠帶運(yùn)輸機(jī)以怠速運(yùn)行,等待煤料添加到皮帶上,達(dá)到空載時(shí)最大節(jié)能效果;當(dāng)皮帶上填充率未達(dá)到100%時(shí),膠帶運(yùn)輸機(jī)根據(jù)填充率的具體數(shù)據(jù)來降速運(yùn)行,等待填充率逐步上升,膠帶運(yùn)輸機(jī)運(yùn)行速度也相應(yīng)提升;當(dāng)皮帶填充率帶到100%時(shí),膠帶運(yùn)輸機(jī)按照額定速度運(yùn)行。
2 煤礦膠帶運(yùn)輸機(jī)優(yōu)化控制
2.1 膠帶運(yùn)輸機(jī)優(yōu)化控制思路
首先在煤礦膠帶運(yùn)輸系統(tǒng)合適的位置上安裝皮帶秤、速度傳感器、扭矩傳感器、電壓電流傳感器等設(shè)備來實(shí)時(shí)監(jiān)測(cè)膠帶運(yùn)輸機(jī)的運(yùn)行數(shù)據(jù)。然后通過智能算法進(jìn)行數(shù)據(jù)分析,以此來判斷膠帶運(yùn)輸機(jī)的填充率和運(yùn)行效率。以膠帶運(yùn)輸機(jī)的填充率等數(shù)據(jù)為輸入指標(biāo),通過比例積分微分(Proportion Integration Differentiation, PID)控制器來調(diào)節(jié)驅(qū)動(dòng)電機(jī)的轉(zhuǎn)速,達(dá)到膠帶運(yùn)輸機(jī)運(yùn)行速度智能控制的目的,保持膠帶運(yùn)輸機(jī)運(yùn)行效率 最大化,避免空載和輕載情況下,膠帶運(yùn)輸機(jī)仍然按照額定速度運(yùn)行。
2.2 膠帶運(yùn)輸機(jī)優(yōu)化控制設(shè)計(jì)
PID控制是由比例、積分、微分控制相結(jié)合對(duì)系統(tǒng)進(jìn)行控制,既能夠考慮到系統(tǒng)的響應(yīng)速度,還能夠兼顧系統(tǒng)超調(diào)和變化趨勢(shì)等,有較好適應(yīng)性和魯棒性。另外PID控制結(jié)構(gòu)比較簡(jiǎn)單,穩(wěn)定性比較好,可靠性較高,控制精度較高。本文根據(jù)煤礦膠帶運(yùn)輸系統(tǒng)工作實(shí)際情況和具體要求對(duì)其設(shè)計(jì)優(yōu)化控制系統(tǒng),通過實(shí)驗(yàn)和理論計(jì)算來調(diào)節(jié)PID參數(shù),達(dá)到最優(yōu)控制目的,其控制原理如圖2所示。
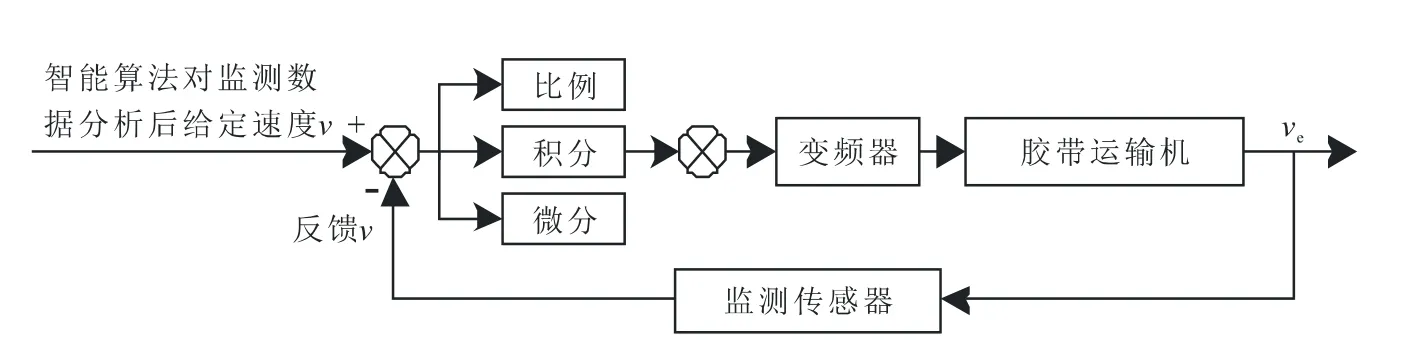
圖2 膠帶運(yùn)輸機(jī)控制原理圖
3 膠帶運(yùn)輸系統(tǒng)監(jiān)測(cè)設(shè)計(jì)
為了保障膠帶運(yùn)輸系統(tǒng)安全運(yùn)行,方便遠(yuǎn)程和實(shí)時(shí)監(jiān)測(cè)煤礦膠帶運(yùn)輸機(jī)的運(yùn)行狀況,本文開發(fā)基于瀏覽器/服務(wù)器(Browser/Server, B/S)+客戶端/服務(wù)器(Client/Server, C/S)混合架構(gòu)網(wǎng)絡(luò)模 式監(jiān)測(cè)軟件,來實(shí)時(shí)監(jiān)測(cè)膠帶運(yùn)輸?shù)闹匾\(yùn)行數(shù)據(jù)。這種混合網(wǎng)絡(luò)模式架構(gòu),在本地可以通過客戶端采用有線的方式實(shí)時(shí)監(jiān)測(cè)膠帶運(yùn)輸機(jī)運(yùn)行數(shù)據(jù),保證數(shù)據(jù)的實(shí)時(shí)性,當(dāng)我們離開監(jiān)測(cè)中心時(shí),我們可以通過瀏覽器遠(yuǎn)程監(jiān)測(cè)膠帶運(yùn)輸機(jī)運(yùn)行數(shù)據(jù)。混合架構(gòu)網(wǎng)絡(luò)模式如圖3所示。

圖3 混合模式結(jié)構(gòu)圖
根據(jù)膠帶運(yùn)輸系統(tǒng)監(jiān)測(cè)數(shù)據(jù)的實(shí)際需要,本文開發(fā)監(jiān)測(cè)軟件應(yīng)具有實(shí)時(shí)數(shù)據(jù)顯示、實(shí)時(shí)趨勢(shì)曲線、數(shù)據(jù)分析、數(shù)據(jù)報(bào)表、超限報(bào)警等功能。其中,數(shù)據(jù)分析功能是本文基于組態(tài)王開發(fā)的監(jiān)測(cè)軟件通過動(dòng)態(tài)數(shù)據(jù)交換(Dynamic Data Exchange, DDE)技術(shù)調(diào)用Matlab軟件智能算法,分析得出膠帶運(yùn)輸機(jī)皮帶填充率,進(jìn)一步給定膠帶運(yùn)輸機(jī)控制系統(tǒng)運(yùn)行速度設(shè)定值,并通過PID控制器進(jìn)行調(diào)節(jié)。監(jiān)測(cè)平臺(tái)軟件架構(gòu)設(shè)計(jì)如圖4所示。
通過監(jiān)測(cè)軟件實(shí)時(shí)監(jiān)測(cè)膠帶運(yùn)輸機(jī)運(yùn)行情況,需要首先登陸監(jiān)測(cè)軟件系統(tǒng),登錄界面需要正確的用戶名和密碼,否則將無法查看監(jiān)測(cè)信息。
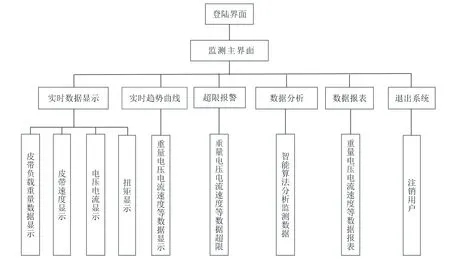
圖4 監(jiān)測(cè)軟件架構(gòu)
4 結(jié)語
本文針對(duì)煤礦膠帶運(yùn)輸系統(tǒng)現(xiàn)存的能源浪費(fèi)問題,研究了煤礦膠帶運(yùn)輸結(jié)構(gòu),并對(duì)節(jié)能原理進(jìn)行了分析,提出了根據(jù)煤礦膠帶運(yùn)輸系統(tǒng)皮帶的負(fù)載情況進(jìn)行智能控制的思想,通過安裝傳感器對(duì)膠帶運(yùn)輸機(jī)運(yùn)行情況的數(shù)據(jù)進(jìn)行采集,并進(jìn)一步對(duì)數(shù)據(jù)進(jìn)行分析,得出膠帶運(yùn)輸機(jī)最佳運(yùn)行速度,并作為輸入傳遞給PID控制器,對(duì)膠帶運(yùn)輸機(jī)進(jìn)行閉環(huán)控制。此優(yōu)化控制系統(tǒng)通過實(shí)驗(yàn)?zāi)軌蜻_(dá)到額定負(fù)載額定速度運(yùn)行,輕載減速運(yùn)行,空載怠速運(yùn)行的目的,起到了節(jié)約能源的效果。
本文開發(fā)基于B/S+C/S混合架構(gòu)網(wǎng)絡(luò)模式監(jiān)測(cè)軟件,來實(shí)時(shí)監(jiān)測(cè)膠帶運(yùn)輸?shù)闹匾\(yùn)行數(shù)據(jù)。這種監(jiān)測(cè)模式既保證監(jiān)測(cè)數(shù)據(jù)實(shí)時(shí)性,也為遠(yuǎn)程監(jiān)測(cè)數(shù)據(jù)提供了方便。監(jiān)測(cè)軟件監(jiān)測(cè)數(shù)據(jù)全面,并具有數(shù)據(jù)分析功能,可以根據(jù)皮帶填充率得到最佳運(yùn)行速度。對(duì)該優(yōu)化控制系統(tǒng)的推廣和應(yīng)用,有一定的工程實(shí)踐價(jià)值。
猜你喜歡
經(jīng)濟(jì)技術(shù)協(xié)作信息(2018年22期)2019-01-19 03:00:22
工業(yè)設(shè)計(jì)(2016年4期)2016-05-04 04:00:23
現(xiàn)代企業(yè)(2015年8期)2015-02-28 18:55:34
現(xiàn)代企業(yè)(2015年6期)2015-02-28 18:51:50
河南科技(2014年11期)2014-02-27 14:17:24
河南科技(2014年11期)2014-02-27 14:09:47
河南科技(2014年10期)2014-02-27 14:09:19
河南科技(2014年5期)2014-02-27 14:08:27
河南科技(2014年8期)2014-02-27 14:08:07
河南科技(2014年8期)2014-02-27 14:07:44