艦艇作戰系統動態零位精度對準可實施性分析*
2022-05-11 09:34:54周錦鋒
艦船電子工程 2022年4期
關鍵詞:系統
周錦鋒
(海裝駐上海地區第二軍事代表室 上海 200129)
1 引言
艦艇作戰系統零位一致性是決定艦載武器系統射擊精度的重要因素[1]。艦艇作戰系統對準工作(零位標校)是一項復雜的系統工程[2],貫穿于艦艇的設計、制造和服役全壽命周期。“作戰系統對準”(GJB1233A-2008《艦船系統對準要求》)定義為“各系統(設備)同一姿態角信息的機械零位及電氣零位在甲板坐標系內取齊的過程”[3],即作戰系統對準是將全艦探測器、跟蹤器、武器系統、導航等系統和設備的機械零位和電氣零位統一于一個基準,保證作戰系統零位的一致性[4]。本文主要探討新造艦艇作戰系統的對準工作。
2 目前國內外作戰系統對準的方法及存在的問題
作戰系統零位一致性是決定武器系統射擊精度的重要因素。艦艇作戰系統對準工作就是在艦艇各系統及設備在機械零位一致的情況下對各系統及設備的電氣零位進行一致性對準。目前,國內外對作戰系統機械零位的對準方法[5]基本一致,即在系統和設備的安裝過程中,通過嚴格把控系統和設備安裝的水平度和首尾線對準等要求來滿足作戰系統機械零位的一致性。作戰系統電氣零位的對準主要是通過數字或模擬量修正,調整傳感器和武器的電氣零位,以滿足作戰系統電氣零位一致性的要求,電氣零位主要包括角度零位(舷角和仰角)和距離零位兩部分[6]。目前,國內艦艇作戰系統對準的方法主要是瞄星法和互瞄法[7],均為靜態的零位標校方法。國外主要采用對多個方向進入的移動目標進行動態零位精度標校的方法。
2.1 瞄星法
瞄星法(結合有源標標定法[8~9])主要在艦艇系泊狀態下組織實施。艦船在系泊狀態下,采用電子有源標,并以GPS為真值實施對警戒搜索雷達的舷角和距離精度標校以及對跟蹤傳感器的距離精度標校。通過瞄星法實施對跟蹤傳感器光軸(出廠前已完成光電匹配校正)的舷角、仰角精度標校以及武器的舷角、仰角精度標校。甲板經緯儀是一種測量某一目標點相對于經緯儀所設定的平面和零位中線的仰角和舷角真值的精密儀器設備[7]。瞄星時,甲板經緯儀以及各設備水平零位在相互平行的平面上(各平面與艦艇基準平臺平面平行),且舷角零位與艦艏艉線平行。因為被測目標星體的距離相對于甲板經緯儀與設備之間的距離可以近似認為無窮遠,所以甲板經緯儀與設備觀察星體的視線相互平行,甲板經緯儀觀測星體的舷角和仰角測量值理論上就是各設備對星體的舷角和仰角的真值[7]。

圖1 瞄星法示意圖
瞄星法為一個方向位置的靜態精度標校。在該方位上,瞄星法具有對準精度高,實施較為簡單等優點。但目前甲板經緯儀沒有在過程中使用,一般使用大地經緯儀,測量精度得不到保證[10];該方法需要通過甲板經緯儀一次對準,直接觀測星體,故受氣象條件影響較大[7];隨著時代的發展,滿足條件的碼頭周圍光污染越來越嚴重,對星體的觀測也越來越困難;影響瞄星法精度的主要因素為經緯儀人工架設的誤差以及各設備人工瞄準的誤差,某些艦船由于設備較多,需幾個晚上才能標校完成,經緯儀就會存在多次人工架設誤差。
2.2 互瞄法
互瞄法(結合有源標標定法):主要在艦艇半坐墩狀態下組織實施。艦船在系泊狀態下,采用電子有源標,并以GPS為真值實施對傳感器的距離精度標校。通過互瞄法實施對跟蹤傳感器光軸(出廠前已完成光電匹配校正)的舷角、仰角精度標校以及武器的舷角、仰角精度標校。該方法通過架設在艦上的經緯儀與架設在岸上的經緯儀互相瞄準,達到兩者光軸重合,岸上經緯儀測量出的各設備的舷角和仰角作為真值,各設備測量出岸上經緯儀的舷角和仰角,與真值比較進行修正[7]。測量時,需要岸上經緯儀水平零位與艦上經緯儀及各設備的水平零位在相互平行的平面上,且岸上經緯儀舷角零位與艦艏艉線平行。測量時,需要將大地坐標系內岸上經緯儀測量的舷角和仰角真值轉化為艦艇甲板坐標系的舷角和仰角真值。

圖2 互瞄法示意圖
互瞄法為一個方向位置的靜態精度標校。互瞄法是由瞄星法發展、演變而來的一種方法。在瞄星過程中經緯儀需要一次對準,互瞄法則需要兩個經緯儀對準,所以從理論上來說,互瞄法最大誤差系數比瞄星法誤差系數增加了一倍左右[7]。互瞄法操作過程較為復雜,在實施的過程中人為誤差因素較多。由于一部經緯儀架設在岸上,一部經緯儀架設在艦船上,涉及到兩個坐標系的轉換,所以對艦船的整個過程姿態要求比較高,艦船必須在船塢半坐墩狀態,且相對于大地的水平姿態要求比較高。
2.3 國外某三坐標雷達零位精度對準方法
國外某艦艇航行試驗時某三坐標雷達進行了動態零位精度對準,內容涉及對空的精度標定和對海的精度測試。
該雷達對空精度標定方法:空中目標(飛機,目標高度3000~5000m)從相對試驗艦四個不同特征方向(0°、90°、180°、270°)進入,該雷達以警戒方式實時跟蹤并錄取目標數據(距離、舷角、仰角),飛機攜帶的GPS和試驗艦配置的GPS同時實時記錄各自的坐標位置等相關參數。待四次進入完成后以兩個GPS數據為真值分析、比對雷達錄取的目標數據(距離、舷角、仰角),如其平均差值大于精度值,則修正后重復進入標校。標校前為保證數據的有效性需將GPS和雷達進行對時,保證時間軸統一。判別合格的標準為四個不同方向進入的目標參數平均差值不大于指標值。
該雷達對海的精度測試方法:待對空的精度標定完成并合格后,以較小目標的配試船直線由遠至近航行約10km,以GPS為真值驗證雷達精度(舷角、距離)是否滿足指標要求。
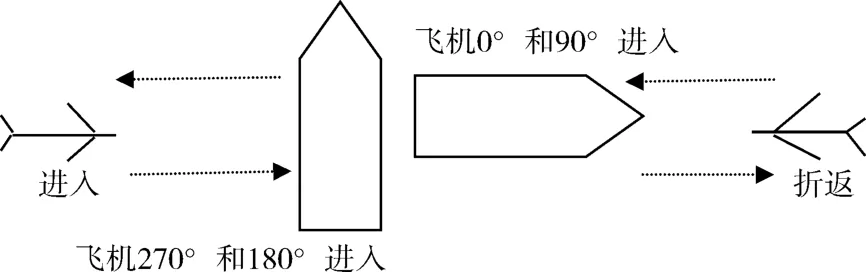
圖3 對空動態零位標校示意圖
對比該型雷達與國內各型傳感器,其距離精度略高于國內各型傳感器的指標要求,舷角和仰角精度要高于國內警戒傳感器的精度要求,但略小于跟蹤傳感器以及武器的精度要求。
3 一種艦艇作戰系統動態零位精度對準的思路和方案
3.1 艦艇作戰系統動態零位精度對準的思路
瞄星法和互瞄法均為一個方向位置的靜態精度對準,武器系統的有效打擊范圍一般是跟蹤傳感器的視界和武器自身射界的公共區域,而不只是一個特定方位,一個方向位置的精度對準存在一定的不確定因素。靜態下的武器系統零位一致性對準(瞄星法和互瞄法)只是在方位的某一點完成了傳感器和武器各自零位的精度對準,而武器使用所需要的是動態下的系統精度一致性,該工作一般都是艦艇交付后由專業人員在武器射擊精度試驗前通過動態零飛來完成。國外某三坐標雷達零位精度標校的方法其精度不滿足跟蹤傳感器以及武器的精度要求。
為了解決以上幾種方法存在的問題,使新造艦艇交付后即具備更高的作戰系統零位精度,更好地滿足武器系統實際使用過程中所需要的動態系統精度一致性,提出了一種艦艇作戰系統動態零位精度對準的思路[11]。艦艇作戰系統動態零位精度對準在完成傳感器(警戒和跟蹤傳感器)動態零位精度對準的前提下,協調武器完成動態精度一致性的對準,該方法一定程度上完成了動態下的系統精度一致性校正,更貼近武器實際使用狀態。
3.2 艦艇作戰系統動態零位精度對準的方案
1)機械零位對準:機械零位對準的方法與瞄星法和互瞄法一樣,即對基座的制造、船體中心線、基座定位、基座船臺加工進行嚴格控制,在系統和設備的安裝過程中,通過嚴格把控系統和設備安裝的水平度和首尾線對準等要求來滿足作戰系統機械零位的一致性。要求設備水平度和首尾線對準測試合格。
2)傳感器(警戒和跟蹤傳感器)電氣零位對準:采用四個不同特征方向(0°、90°、180°、270°)移動目標(無人機)進入的動態零位精度標校的方法。無人機從相對試驗艦四個不同特征方向(0°、90°、180°、270°)進入,傳感器實時跟蹤并錄取目標數據(距離、舷角、仰角),飛機攜帶的BDS和試驗艦配置的BDS同時實時記錄各自的坐標位置等相關參數。待四次進入完成后以兩個BDS數據為真值分析、比對傳感器錄取的目標數據(距離、舷角、仰角),如其平均差值大于精度值,則修正后重復進入標校。標校前為保證數據的有效性需將BDS和傳感器進行對時,保證時間軸統一。判別合格的標準為四個不同方向進入的目標參數平均差值不大于指標值。動態零位標校示意圖見圖4。

圖4 艦艇作戰系統動態零位精度對準示意圖
3)武器電氣零位對準:以系統為單位采用動態零飛(零飛儀)測試方法[12~13]。“零飛測試”工作原理:火控雷達捕獲目標后穩定跟蹤,按射彈飛行時間為“零”解算諸元并輸出,帶動武器跟蹤目標。即把雷達測得當前目標點球坐標轉化為球坐標輸出帶動武器跟蹤目標[14]。零飛測試精度較高,理論上武器應直接指向目標,用架設在身管上和身管軸線標定好的攝像機采集圖像,則圖像應在視場中心,偏離視場中心的誤差量就是武器的舷角和仰角誤差量。
4)對海精度檢查:待對空的精度標定完成并合格后,以較小目標的配試船直線由遠至近航行約10km,以BDS的數據為真值驗證傳感器(舷角和距離)和武器(舷角)的精度是否滿足指標要求。
4 艦艇作戰系統動態零位精度對準可實施性分析及主要研究內容
4.1 可實施性分析
艦艇作戰系統動態零位精度對準完成了動態下的系統精度一致性校正,更貼近作戰系統和武器的實際使用狀態。但該方案也推翻了原先國內的傳統思路,需要總體和系統責任單位的支持和確認:需協調各傳感器實時錄取并輸出跟蹤目標的相關參數(距離、舷角、仰角):需協調各武器系統技術責任單位確認動態平均值的精度判別標準;需編制適用于各型艦船動態標校的具體實施方案和流程。
1)該方案用無人機替代國外方案中的飛機,無人機搭載龍伯球角反射體,標校時飛行多個架次,飛行高度不小于1000m,需申請空域保障。無人機必須具備慢速、航向穩定、能攜帶BDS和反射體等條件,并且具有海上回收多次利用的能力。目前,國內某靶機可加裝龍伯球增加其反射面積,其航速也能滿足動態標校需求,而且其具備的海上可回收能力不但能滿足多架次的標校需求,同時也能滿足加載BDS的數據回收要求。
2)無人旋翼直升機搭載龍伯球角反射體也能代替該靶機,無人旋翼直升機具有飛行距離遠、飛行時間長、操控簡單、航路規劃便捷等優點,可保證標校期間采集足夠的真值數據,獲得較廣的標定距離、方位、仰角變化范圍。龍伯球外形呈圓球形,直徑300mm,內部發射體在立體上大于240°,加掛到無人直升機上后,基本不受無人機飛行航路限制,可保證雷達接收到龍伯球的有效反射信號[15]。
3)可考慮用BDS代替GPS,基于載波相位的BDS差分定位精度可達厘米級,完全能滿足動態標校的精度要求[15]。該方案用BDS代替國外采用的GPS,真值精度的提高,能進一步提升跟蹤傳感器的標校精度。
4)目前,國內零飛測試應用比較多,技術也相對成熟,零飛儀的選擇面也相對廣泛。
艦艇作戰系統動態零位精度對準方案采用國內相關成熟的技術和設備,可實施性好。
4.2 方案的主要研究內容
1)BDS設備配置以及相對應的數據處理軟件開發;
2)調研、協調并選擇滿足動態標校保障需求的可回收無人機;
3)協調各型相關傳感器,具備實時錄取、處理傳感器跟蹤目標的標校數據能力;
4)協調各武器系統責任單位,確定動態零位標校替代傳統標校的可實施方案;
5)調研各型武器動態零飛(零飛儀)測試方法或研制滿足各型武器精度標校的標校儀;
6)開發并驗證適用于動態標校的數據處理軟件;
7)分析艦艇姿態對作戰系統動態零位對準精度的影響[16]。
5 結語
艦艇作戰系統動態零位精度對準方案采用國內相關成熟的技術和設備,可實施性好。該方案用多個方向的移動目標進入的動態零位精度標校法對傳感器進行對準,用動態零飛對武器系統進行對準,完成了作戰系統動態下的系統精度一致性校正,貼近武器實際使用狀態。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
