混合現實電磁術中導航技術在神經外科手術中的應用
2022-05-11 06:57:28趙振宇陳凌劉嘉霖孫國臣魯通王健沈少平張治中李云利李鑫白玉名潘吉鑫熊遠毅沙洪飛余新光
臨床神經外科雜志 2022年2期
趙振宇,陳凌,劉嘉霖,孫國臣,魯通,王健,沈少平,張治中,李云利,李鑫,白玉名,潘吉鑫,熊遠毅,沙洪飛,余新光
現代神經外科手術理念是精準切除病變且最大程度保護神經功能, 因此導航在神經外科術中應用不可或缺。混合現實技術(mixed reality,MR) 是應用計算機將影像學資料生成虛擬圖像并與現場的真實場景疊加,實現虛擬與真實場景的互動。本研究通過應用混合現實多模態導航系統技術對2018年5月—2018年6月解放軍總醫院神經外科收治的4例病例制定手術方案并實施術中導航,現報告如下。
1 資料與方法
1.1 一般資料 共納入4例患者,其中男2例,女2例,診斷分別為腦膜瘤、膠質瘤、顱內淋巴瘤、腦膿腫(表1)。治療方案申請并獲得解放軍總醫院倫理委員會批準,4例患者均被告知并簽署參與研究的知情同意書。

表1 患者臨床資料和病理結果
1.2 影像學數據獲取 頭顱影像原始數據(西門子GE 64排螺旋CT,西門子1.5 T術中MRI) 通過院內網PACS軟件系統獲取。CT普通平掃層厚5 mm,CTA數據層厚0.5 mm,顱骨數據層厚2 mm,MRI數據層厚1 mm。數據格式為 Dicom。
1.3 混合現實圖像重建和導航 患者頭部帶4-6枚脂溶性標記物,術前行顱腦MRI掃描,混合現實導航系統術前使用自研工作站軟件(StarSource V1.0 Beta),通過患者的Dicom數據重建出病灶部位的多模態三維解剖模型,含有皮膚、顱內動靜脈以及病變結構,應用彌散張量成像技術重建錐體束、視放射及弓形束等神經結構,導航計劃輸入導航系統(Medtronic StealthStation i7),生成手術計劃文件(v3d)。手術前將手術計劃文件傳到自研手術室客戶端(StarNav V1.0 Beta)軟件中并運行導航軟件。將磁導航設備的磁場發射器(加拿大NDI,Aurora)擺放到患者頭部邊緣,距離不超10 cm,在患者對側顳部粘附配套的六自由度追蹤部件(NDI,Part Number 610066),使用六自由度探針工具(Part Number 610065)完成點注冊。術者佩戴Hololens眼鏡(Microsoft,美國微軟)將虛擬的全息圖像融合疊加于患者頭部,并將導航影像投射到手術顯微鏡(德國OPMI Pentero,Carl Zeiss) 用來輔助手術。術前術中導航定位均同時應用德國博醫來(BrainLab)導航系統進行同步對照驗證(圖1)。
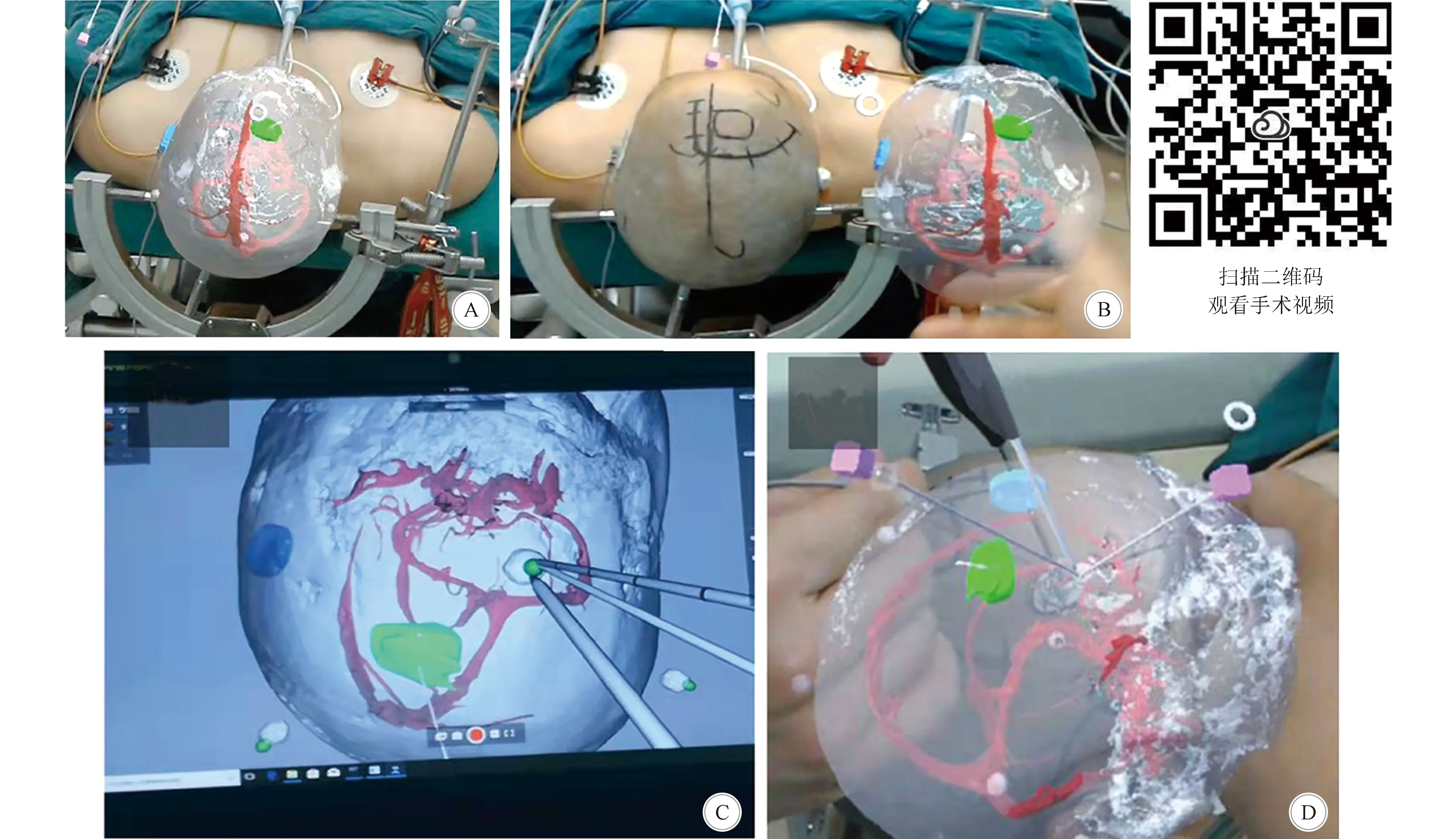
A:混合現實神經外科術中導航系統重建的虛擬3D病變; B:根據術者習慣可以移動虛擬3D病變圖像; C:顯示兩種導航結果的一致性; D:混合現實神經外科術中導航與BrainLab導航結果一致
1.4 手術方法 4例神經外科患者術前均使用混合現實神經外科導航系統重建病變,設計手術切口和選擇手術入路,并在全麻氣管插管下順利完成手術。
2 結 果
4例患者均成功進行術前計劃并順利完成手術。同時應用BrainLab導航病變的邊界,結果與MR導航結果完全吻合。應用MR導航技術實施2例深部病變的手術導航,手術情況及術中術后復查現實MR導航位置準確。患者術后未出現新發癥狀,無手術相關并發癥,均按時出院。
2.1 病例1 患者女,50歲,因頭痛1個月入院,神經系統查體無陽性體征。術前MRI檢查示右額部腫瘤,大小約2.4 cm×2.1 cm,與硬腦膜關系密切,局部可見“鼠尾征”。患者進入手術室后在術中磁共振檢查室完善術前MRI檢查,患者進行插管麻醉的同時,術者進行數據處理,配準重建三維圖像并導入導航系統i7,術者佩戴Hololens眼鏡可見綠色腫瘤的三維虛擬圖像和紅色的腦靜脈系統圖像,顱骨及頭皮透明化。根據腫瘤在頭部的投影,采取右額部弧形切口(圖2),同時BrainLab導航進行定位表明兩種導航結果一致,進行開顱手術證實導航定位準確,銑開骨瓣見硬腦膜與骨瓣粘連緊密,切開硬腦膜見腫瘤灰白、質韌,顯微鏡下全切腫瘤及其基底硬腦膜,取骨膜修補硬腦膜,磨除增生及破壞的顱骨內板,逐層關顱。術后患者無新發神經功能癥狀。CT 提示術區無明顯出血,術后1周傷口拆線出院。病理報告為腦膜瘤,WHO Ⅰ 級。隨訪患者現無不適主訴及陽性體征。
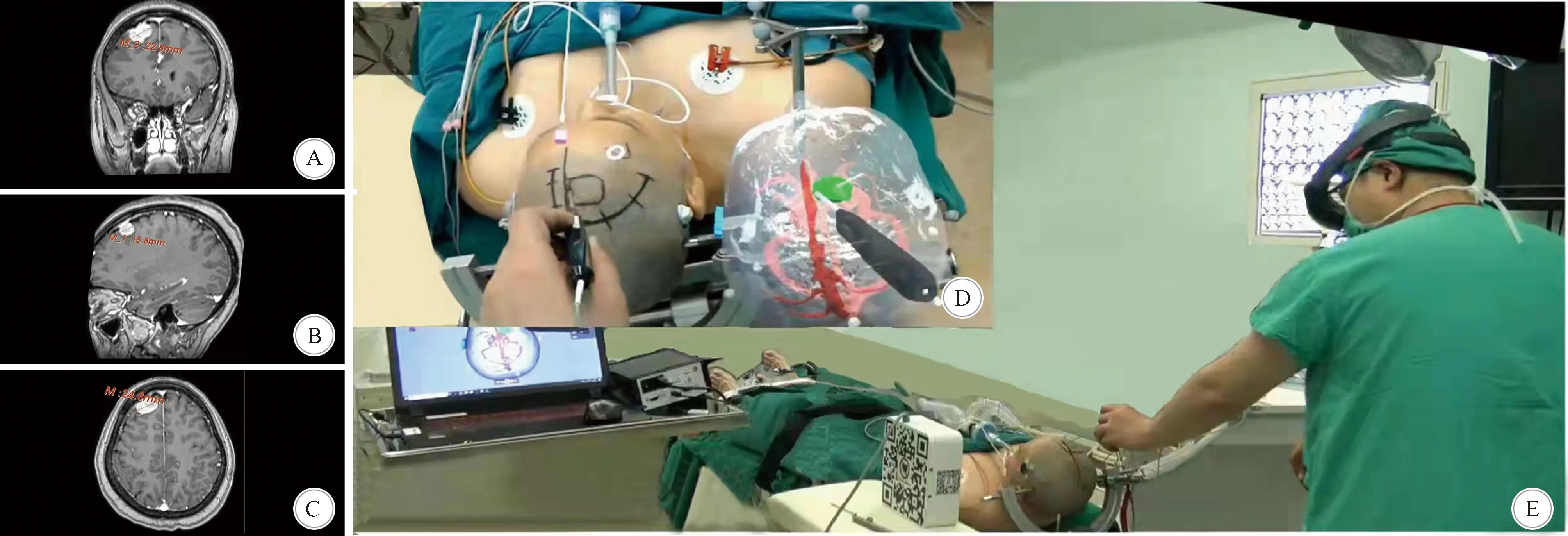
A:1.5 T T1增強MRI圖像冠狀位; B:矢狀位; C:軸位; D:術者佩戴HoloLens 眼鏡可見3D圖像; E:根據混合現實神經外科術中導航系統標記的病變,設計腦膜瘤手術皮瓣,綠色代表腦膜瘤,用紅色標記靜脈竇和動脈
2.2 病例2 患者男,40歲,因頭痛半個月入院,神經系統查體無陽性體征。術前MRI檢查示右額葉占位性病變,大小約6.5 cm×5.4 cm,混雜T1,長T2,增強見環形強化和囊變,累及胼胝體。術者重建MR圖像并導入導航系統i7,佩戴Hololens眼鏡可見綠色腫瘤的三維虛擬圖像,靜脈系統標記為紫色,腦室系統標記為淺藍色。BrainLab導航進行定位表明兩種導航結果一致,術者應用MR多模態導航標記腫瘤體表投影,采取右額部弧形切口(圖3),銑開骨瓣后神經電生理監測定位中央溝等功能區,額中回造瘺分塊切除腫瘤,灰白、質軟,顯微鏡下按計劃全切腫瘤。術后患者無新發神經功能癥狀。復查顱腦CT未見出血,術后 1 周傷口拆線出院。術后報告為膠質母細胞瘤,WHO Ⅳ級。患者因腫瘤復發于2021年1月死亡,生存時間32個月。

A:1.5 T T1增強MRI圖像冠狀位; B:矢狀位; C:軸位; D:根據混合現實神經外科術中導航系統標記的病變,設計膠質母細胞瘤手術皮瓣; E:重建3D混合現實圖像,綠色標記病變,靜脈竇和動脈用紫色標記,淺藍色標識腦室
2.3 病例3 患者男,58歲,因頭痛伴右側肢體肌力減弱1周入院,查體:顱神經未見明顯異常,右側肢體肌力Ⅲ級,感覺無異常,余神經系統查體無陽性體征。術前MRI檢查示左側丘腦腫瘤,病變大小約4.1 cm×3.7 cm,等T1長T2,增強見均勻強化,考慮顱內淋巴瘤可能性大。術者重建MR圖像并導入導航系統i7,佩戴Hololens眼鏡可見綠色腫瘤的三維虛擬圖像,紅色動脈系統,紫色靜脈竇和淺藍色腦室系統。BrainLab導航進行定位表明兩種導航結果一致,按照MR導航系統選擇左顳部直切口,顱骨鉆孔后,術者在Hololens眼鏡中可直觀選擇避開腦血管的最佳穿刺路徑,用Varioguide無框架立體定向系統取腫瘤組織活檢,穿刺針到達MR導航活檢位置后吸取8條病變組織,注入0.5 mL空氣后撤出穿刺針。術中MRI顯示穿刺活檢位置理想,無出血損傷(圖4)。術后患者右側肢體肌力Ⅳ級,術后1周傷口拆線。術后病理為彌漫大B淋巴細胞瘤,轉血液科行化療。隨訪患者現無不適主訴,四肢肌力感覺無明顯異常。
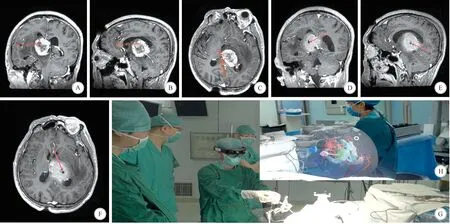
A:1.5 T T1增強MRI圖像冠狀位; B:矢狀位; C:軸位; D:活檢后術中MRI 冠狀位; E:矢狀位; F:軸位; G:應用混合現實神經外科術中導航系統進行淋巴瘤活檢; H:重建3D混合現實圖像,粉色標識穿刺的方向和位置,綠色標識病變,紅色標識動脈,紫色標識靜脈竇,淺藍色標識腦室系統
2.4 病例4 患者女,44歲,因左側肢體無力1周入院,查體:左側肢體肌力0級,感覺無異常,左側病理征陽性。術前MRI檢查示右額葉占位性病變,病變大小約5.2 cm×4.1 cm,環形強化,診斷為腦膿腫。術者進行MR圖像重建并導入導航系統i7,佩戴Hololens眼鏡可見黃色腦膿腫的三維虛擬圖像,可見紅色動脈系統,紫色靜脈竇和淺藍色腦室系統的三維虛擬圖像。BrainLab導航進行定位表明兩種導航結果一致,選擇右額部冠狀縫直切口,應用MR多模態導航引導下鉆骨孔,十字切開硬腦膜,避開藍色靜脈穿刺針沿導航方向進針4 cm到達膿腔,可見引流管內黃色濃稠液體流出,萬古霉素鹽水反復沖洗引流,放置引流管后逐層縫合(圖5)。術后患者左側肢體肌力Ⅳ級,術后1周傷口拆線。膿液培養結果為肺炎克雷伯菌,術后給予美洛培南,利奈唑胺等藥物治療。隨訪患者現無不適主訴,四肢肌力感覺無明顯異常。

A:1.5 T T1增強MRI圖像冠狀位; B:矢狀位; C:軸位; D:應用混合現實神經外科術中導航系統行腦膿腫引流術,黃色標識腦膿腫,紅色標識動脈,藍色標識靜脈竇,淺藍色標識腦室系統
3 討 論
神經系統解剖相對復雜,現在手術越來越重視保護神經功能,減少術后并發癥[1],因此精確導航在神經外科手術中的應用越來越廣泛。神經導航可以融合MRI、MRA、MRV、DTI等多種影像數據,實現快速地圖像重建[2]。術者可以通過標注病變、腦組織、血管、神經傳導束等結構的圖像,明確病變位置及與周圍結構的相互關系[3],并可將手術計劃傳輸到導航工作站實現術中定位功能。
但現有光學神經導航設備價格昂貴且操作過程比較復雜,很多醫院未普及使用。現有光學導航結果在顯示器中通常是平面圖像,即使三維重建的圖像也是顯示為降維的二維圖像,術者需要在腦海中轉化為3D位置關系并與患者真實解剖體位相對應,這依賴術者豐富的解剖知識及手術經驗。如果術中根據體位需要進行手術床角度調整、調整手術入路角度,病變角度及位置發生相應的改變時,需要術者重新在腦中構建患者解剖相對位置。這需要通過長時間反復訓練,而且可能存在不規范化、不標準化,不易學習掌握的缺點。常規導航需要術者將視線從術區轉移到監視器,這種轉換過程加長了手術時間,來回轉移視線也增加手術風險。混合現實相對價格便宜易于操作,可成為沒有配備光學導航單位的備選技術。
MR技術通過生成虛擬圖像并投射到手術現實環境中,可直觀地可視化顯示出患者的病變,因此已應用于骨科、肝膽外科、泌尿外科等手術中[4-13]。神經外科應用MR技術可直接將病變、頭皮、顱骨、神經纖維束、腦室、血管等結構三維可視化,并可通過測量病變與解剖標志物之間的距離進行術中導航[12-13]。
在本研究中,應用MR多模態導航系統為4例患者設計手術入路并實施術中導航,獲得較理想的效果,總結體會:(1)MR重建的虛擬圖像直觀可視化在手術環境中可與患者完全重合,較現有的光學導航無需術者根據導航圖像在腦中重建三維圖像,也無需術者反復抬頭看導航顯示器,減少視線和注意力在術區和導航監視器間轉換;(2)設計手術入路時,可在手術環境中將重建的圖像與患者頭部疊加,達到混合現實的效果。術中可直接看見病變在患者頭部的投影,患者病變、皮瓣、骨瓣可視化直觀清晰,根據病變可快速勾畫出其邊界(圖2D)。手術切口較常規導航簡單易行,較傳統光學導航勾畫病變時反復確認病變邊界的時間少;(3)對于深部或功能區的病變,MR導航可讓術者直觀客觀地看清楚術區的解剖關系,便于術前制定手術方案,如磨除顱骨的范圍,切除腫瘤時皮層造瘺的位置。術中根據腫瘤與錐體束、重要血管、腦室等的關系指導手術,圖像直觀可視化避免主觀判斷的誤差,盡可能最大程度切除病變且減少神經功能損傷[11];(4)對于深部穿刺活檢的患者,MR導航可直觀全息地呈現出病變及臨近周圍的解剖結構,為術者提供了科學安全的穿刺路徑[14]。如病例3淋巴瘤穿刺活檢,通過MR導航可直視淋巴瘤周圍的血管,避開血管設計穿刺路徑(圖4H)。病例4通過MR術中導航技術可顯示出腦膿腫壁后方的一條血管(圖5D),如果沒有MR導航技術提供虛擬圖像和導航,僅用傳統光學導航時,術者很難發現深部病變的血管位置,也不容易選擇最佳穿刺角度避開血管,極可能產生術后血腫等手術并發癥。
此外MR導航技術具有直視全息的優勢,可用于術前談話,以更好地讓患者及家屬理解病情和手術風險。同時也可改變傳統的外科醫師培訓學習模式,提高醫師成長速度[15-16]。但是該技術也具有神經導航系統的缺陷,在手術過程中會出現“腦漂移”問題。此時術者可輔以術中MRI,術中超聲等實時成像在某種程度上進行糾正偏差[17-19]。由于本研究例數較少,暫時不能得出影響療效的結論,但是隨著病例積累和技術升級,今后MR導航可實現光、電磁混合導航技術并與手術機器人相結合,在神經外科手術中有更廣闊深遠的應用價值。
利益沖突:所有作者均聲明不存在利益沖突。
猜你喜歡
中國新聞周刊(2024年18期)2024-06-07 22:40:49
昆明醫科大學學報(2021年2期)2021-03-29 07:42:46
文苑(2020年11期)2021-01-04 01:53:20
河北畫報(2020年10期)2020-11-26 07:20:50
現代計算機(2016年12期)2016-02-28 18:35:29
中國衛生標準管理(2015年3期)2016-01-14 03:41:47
發明與創新(2015年25期)2015-02-27 10:39:23
中國衛生(2014年12期)2014-11-12 13:12:38
西南軍醫(2014年5期)2014-04-25 07:42:48
中國中醫藥現代遠程教育(2014年13期)2014-03-01 04:26:36
