水下鋼纜拖拽發(fā)射魚(yú)雷內(nèi)彈道仿真
2022-05-12 10:43:32陳宗楊練永慶
水下無(wú)人系統(tǒng)學(xué)報(bào) 2022年2期
陳宗楊, 練永慶, 李 昂
水下鋼纜拖拽發(fā)射魚(yú)雷內(nèi)彈道仿真
陳宗楊1, 練永慶1, 李 昂2
(1. 海軍工程大學(xué) 兵器工程學(xué)院, 湖北 武漢, 430033; 2. 中國(guó)人民解放軍92336部隊(duì), 海南 三亞, 572000)
針對(duì)現(xiàn)有無(wú)人水下航行器(UUV)發(fā)射魚(yú)雷時(shí)出管速度低、發(fā)生啟動(dòng)故障后無(wú)法順利出管以及作用在魚(yú)雷上的瞬間推力較大等不足, 提出了結(jié)構(gòu)簡(jiǎn)單且能與自航發(fā)射方案配套的水下鋼纜拖拽發(fā)射魚(yú)雷基本結(jié)構(gòu)方案。在此基礎(chǔ)上, 建立了水下鋼纜拖拽發(fā)射魚(yú)雷的內(nèi)彈道模型, 其中包括發(fā)射氣瓶氣體狀態(tài)模型、發(fā)射閥數(shù)學(xué)模型、氣水缸數(shù)學(xué)模型、拖拽裝置數(shù)學(xué)模型以及魚(yú)雷運(yùn)動(dòng)數(shù)學(xué)模型。最后進(jìn)行了發(fā)射過(guò)程仿真, 并對(duì)發(fā)射氣瓶初始充氣壓力大小、UUV航速以及鋼纜彈性等參數(shù)對(duì)魚(yú)雷發(fā)射內(nèi)彈道的影響進(jìn)行了分析對(duì)比。仿真結(jié)果表明: 該方案滿足UUV發(fā)射魚(yú)雷的要求, 在原理上具備可行性, 且結(jié)構(gòu)本身能夠解決自航發(fā)射時(shí)魚(yú)雷因故障無(wú)法順利出管的應(yīng)急拋射問(wèn)題, 并在一定程度上減小了對(duì)魚(yú)雷尾部結(jié)構(gòu)強(qiáng)度的要求。
無(wú)人水下航行器; 魚(yú)雷; 鋼纜拖拽; 內(nèi)彈道; 發(fā)射
0 引言
無(wú)人水下航行器(unmanned undersea vehicle, UUV)作為水下自主作戰(zhàn)平臺(tái)可使用魚(yú)雷作為作戰(zhàn)武器。目前UUV水下魚(yú)雷發(fā)射方案主要有自航式發(fā)射方案和提拉缸式發(fā)射方案[1-4]。例如, 美國(guó)的“MANTA”UUV搭載2枚533 mm口徑魚(yú)雷[5], 采用自航式魚(yú)雷發(fā)射方式。孫玉松等[6]開(kāi)展了在UUV上采用外掛式自航發(fā)射方案發(fā)射魚(yú)雷的研究。練永慶[7]和郭煜[8]等提出了在UUV上采用提拉缸式發(fā)射方案發(fā)射魚(yú)雷。綜上研究可發(fā)現(xiàn), 自航式發(fā)射方案具有結(jié)構(gòu)簡(jiǎn)單、適裝性好的優(yōu)點(diǎn), 但存在魚(yú)雷出管速度低、魚(yú)雷出現(xiàn)啟動(dòng)故障后無(wú)法保證其順利出管等問(wèn)題; 提拉缸式發(fā)射方案受限于自身結(jié)構(gòu), 在發(fā)射中推動(dòng)魚(yú)雷的有效作用距離較短, 導(dǎo)致作用在魚(yú)雷上的瞬間推力及魚(yú)雷運(yùn)動(dòng)最大加速度較大, 對(duì)魚(yú)雷殼體強(qiáng)度及內(nèi)部?jī)x器設(shè)備抗沖擊能力提出了較高的要求。
文中針對(duì)自航式和提拉缸式魚(yú)雷發(fā)射方案的不足, 在參考意大利B512型自航式魚(yú)雷發(fā)射裝置應(yīng)急拋射機(jī)構(gòu)[9-10]的基礎(chǔ)上, 提出了鋼纜拖拽式魚(yú)雷發(fā)射方案。該方案不僅可與自航式發(fā)射方案配套使用, 以解決自航發(fā)射時(shí)魚(yú)雷因故障無(wú)法順利出管的應(yīng)急拋射問(wèn)題, 還可實(shí)現(xiàn)以一定出管速度指標(biāo)發(fā)射魚(yú)雷。同時(shí), 方案中的長(zhǎng)行程氣水缸也可在一定程度上減小對(duì)魚(yú)雷尾部的瞬間作用力。
文中針對(duì)鋼纜拖拽式魚(yú)雷發(fā)射方案建立發(fā)射過(guò)程的相關(guān)數(shù)學(xué)模型并進(jìn)行仿真計(jì)算, 對(duì)影響魚(yú)雷內(nèi)彈道相關(guān)因素進(jìn)行定量分析, 從而為鋼纜拖拽式魚(yú)雷發(fā)射裝置的總體方案設(shè)計(jì)和論證提供理論依據(jù)。
1 鋼纜拖拽式魚(yú)雷發(fā)射方案
鋼纜拖拽式發(fā)射裝置主要由發(fā)射氣瓶、發(fā)射閥、氣水缸、傳動(dòng)活塞、鋼纜、滑輪、柵狀管以及滑塊組成, 如圖1所示。傳動(dòng)活塞、鋼纜和滑塊組成拖拽裝置。發(fā)射氣瓶通過(guò)發(fā)射閥與氣水缸連接, 氣水缸內(nèi)裝有傳動(dòng)活塞, 傳動(dòng)活塞與鋼纜固連并通過(guò)滑塊與魚(yú)雷連接。該裝置安裝在自航發(fā)射管上, 可與自航發(fā)射方案配套使用。
該方案的發(fā)射原理是: 發(fā)射前完成對(duì)發(fā)射氣瓶的充氣, 傳動(dòng)活塞位置如圖1所示; 發(fā)射時(shí), 發(fā)射閥開(kāi)啟, 發(fā)射氣瓶的高壓空氣進(jìn)入氣水缸中傳動(dòng)活塞右側(cè), 由于傳動(dòng)活塞左右壓力差的作用, 傳動(dòng)活塞帶動(dòng)鋼纜向左運(yùn)動(dòng), 鋼纜通過(guò)滑輪帶動(dòng)滑塊向右運(yùn)動(dòng), 滑塊作用在魚(yú)雷上, 推動(dòng)魚(yú)雷加速運(yùn)動(dòng)直至出管。

圖1 鋼纜拖拽式發(fā)射方案結(jié)構(gòu)原理示意圖
2 發(fā)射內(nèi)彈道數(shù)學(xué)模型
2.1 發(fā)射氣瓶氣體狀態(tài)模型
由于發(fā)射過(guò)程非常短暫, 可認(rèn)為發(fā)射過(guò)程中, 發(fā)射氣瓶?jī)?nèi)部空氣的膨脹為絕熱過(guò)程, 由氣體熱力學(xué)定律推導(dǎo)有
忽略發(fā)射過(guò)程中氣體泄漏, 根據(jù)質(zhì)量守恒定律

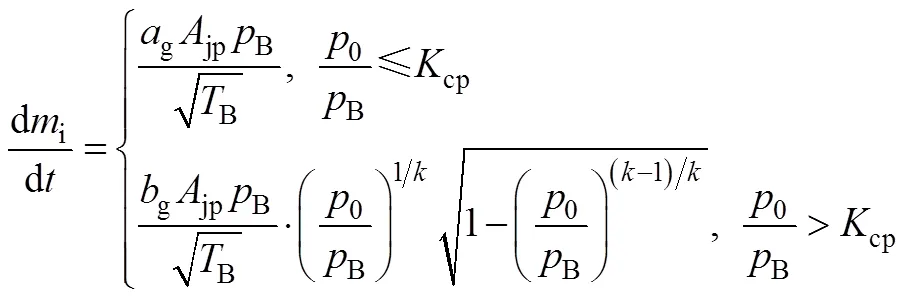
2.2 發(fā)射閥數(shù)學(xué)模型
1) 發(fā)射閥氣體流量模型
發(fā)射氣瓶中經(jīng)發(fā)射閥流入氣水缸的氣體流量可按照準(zhǔn)穩(wěn)態(tài)概念進(jìn)行計(jì)算。假設(shè)氣體流動(dòng)過(guò)程是等熵的, 根據(jù)空氣動(dòng)力學(xué)理論[11], 發(fā)射氣瓶與發(fā)射閥之間的空氣流量為
2) 發(fā)射閥閥芯運(yùn)動(dòng)數(shù)學(xué)模型
發(fā)射閥閥芯的運(yùn)動(dòng)速度[12]

2.3 氣水缸數(shù)學(xué)模型


式中: 為氣水缸氣體瞬時(shí)壓力變化率; 為氣水缸控制體體積變化率。
選擇氣水缸運(yùn)動(dòng)始點(diǎn)為坐標(biāo)原點(diǎn), 傳動(dòng)活塞向左運(yùn)動(dòng)方向?yàn)檎较? 則有
2.4 拖拽裝置數(shù)學(xué)模型
對(duì)拖拽裝置進(jìn)行運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)分析, 得到拖拽裝置運(yùn)動(dòng)模型

2.5 魚(yú)雷運(yùn)動(dòng)數(shù)學(xué)模型
滑塊質(zhì)量相對(duì)于魚(yú)雷質(zhì)量很小, 可以忽略其對(duì)魚(yú)雷運(yùn)動(dòng)產(chǎn)生的影響, 將滑塊和魚(yú)雷視為一體進(jìn)行動(dòng)力學(xué)分析, 得到魚(yú)雷的運(yùn)動(dòng)模型為
3 發(fā)射內(nèi)彈道仿真
根據(jù)建立的發(fā)射內(nèi)彈道數(shù)學(xué)模型編制仿真程序, 在給定仿真條件下, 對(duì)發(fā)射過(guò)程進(jìn)行仿真。
3.1 仿真參數(shù)
將仿真參數(shù)代入模型得到魚(yú)雷位移曲線、魚(yú)雷速度曲線、魚(yú)雷加速度曲線、鋼纜拉力變化曲線及氣水缸控制體壓力曲線, 如圖3~7所示。

圖3 魚(yú)雷位移曲線

圖4 魚(yú)雷速度曲線

圖5 魚(yú)雷加速度曲線

圖6 鋼纜拉力變化曲線
圖7 氣水缸控制體壓力曲線
3.2 變參數(shù)仿真結(jié)果
為了進(jìn)一步分析方案中相關(guān)參數(shù)對(duì)魚(yú)雷內(nèi)彈道的影響, 在仿真參數(shù)的基礎(chǔ)上, 逐一改變參數(shù)中發(fā)射氣瓶初始充氣壓強(qiáng)、UUV航速、魚(yú)雷質(zhì)量以及鋼纜彈性模量, 并分別進(jìn)行仿真以研究相關(guān)參數(shù)對(duì)魚(yú)雷內(nèi)彈道的影響規(guī)律。
1) 改變發(fā)射氣瓶初始?jí)簭?qiáng)
將發(fā)射氣瓶初始充氣壓強(qiáng)分別設(shè)定為減少20%(9.6 MPa)、不變(12 MPa)、增加20%(14.4 MPa)進(jìn)行仿真, 仿真結(jié)果如圖8~圖10所示。

圖8 不同初始充氣壓強(qiáng)下魚(yú)雷位移曲線
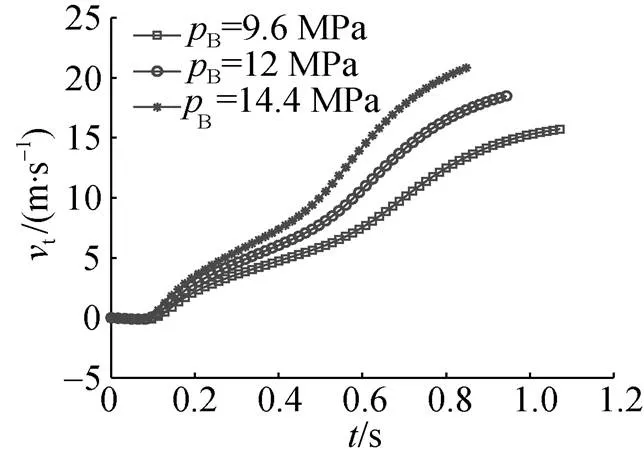
圖9 不同初始充氣壓強(qiáng)下魚(yú)雷速度曲線
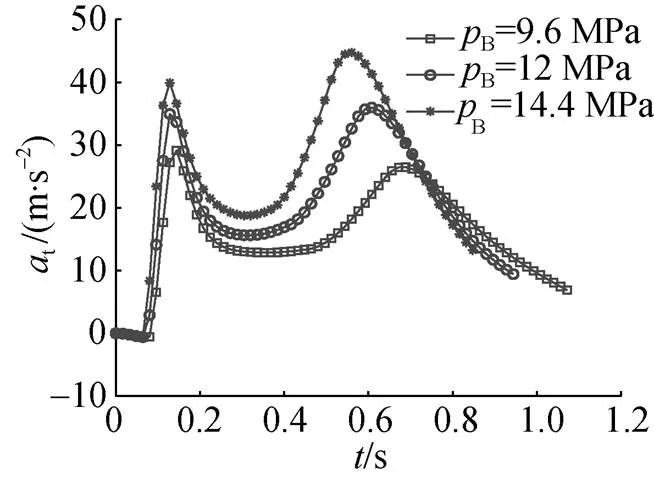
圖10 不同初始充氣壓強(qiáng)下魚(yú)雷加速度曲線

2) 改變UUV航速
分別對(duì)UUV航速sub=0、1.5和3 m/s時(shí)進(jìn)行仿真, 仿真結(jié)果如圖11~圖13所示。
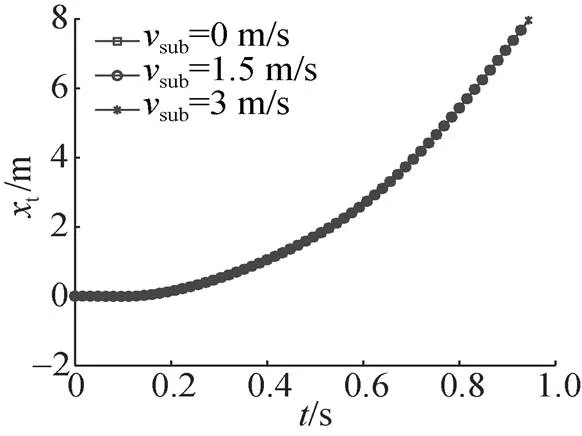
圖11 不同UUV航速下魚(yú)雷位移曲線

圖12 不同UUV航速下魚(yú)雷速度曲線
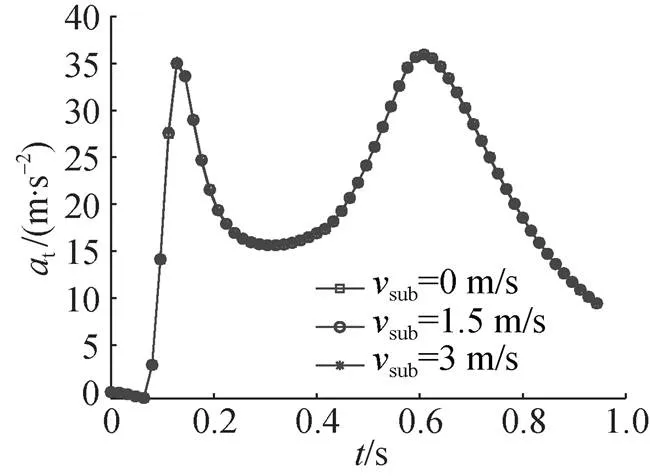
圖13 不同UUV航速下魚(yú)雷加速度曲線
由仿真結(jié)果可知, UUV航速的變化對(duì)魚(yú)雷內(nèi)彈道影響很小。這是因?yàn)樵诜桨钢? UUV航速僅對(duì)魚(yú)雷流體阻力產(chǎn)生影響, 而該阻力與鋼纜拉力相比量值較小。
3) 改變魚(yú)雷質(zhì)量
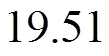
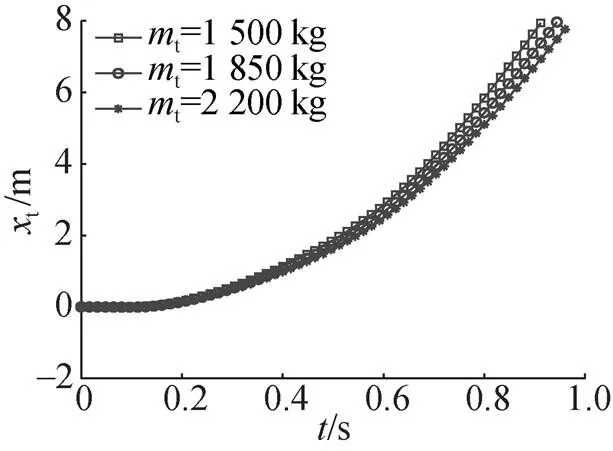
圖14 不同魚(yú)雷質(zhì)量下魚(yú)雷位移曲線
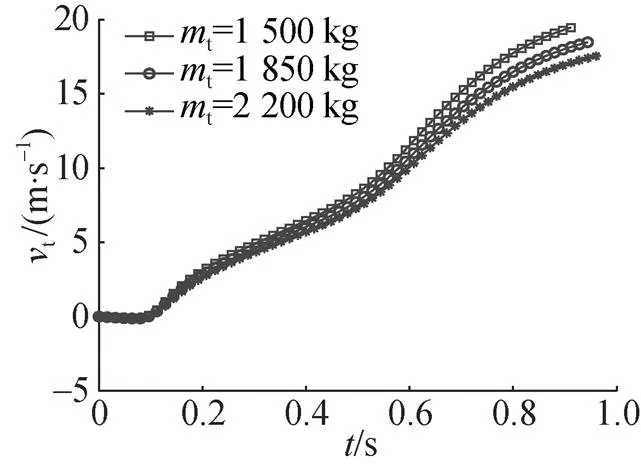
圖15 不同魚(yú)雷質(zhì)量下魚(yú)雷速度曲線

圖16 不同魚(yú)雷質(zhì)量下魚(yú)雷加速度曲線
4) 改變鋼纜彈性模量
將鋼纜彈性模量分別設(shè)定為110 GPa、80 GPa和60 GPa 進(jìn)行仿真, 仿真結(jié)果如圖17~20所示。
從仿真結(jié)果可知, 鋼纜彈性模量的變化對(duì)魚(yú)雷出管速度和出管時(shí)間影響較小; 當(dāng)鋼纜彈性模量為60 GPa時(shí), 鋼纜拉力變化引起的形變較彈性模量為110 GPa時(shí)相對(duì)較大, 因此魚(yú)雷加速度會(huì)產(chǎn)生小幅度振蕩。當(dāng)前滿足本方案需求的幾種鋼纜類(lèi)型[16], 其彈性模量大多在100~200 GPa, 因此鋼纜的彈性不會(huì)對(duì)魚(yú)雷內(nèi)彈道產(chǎn)生太大影響。
圖17 鋼纜彈性變化下魚(yú)雷位移曲線
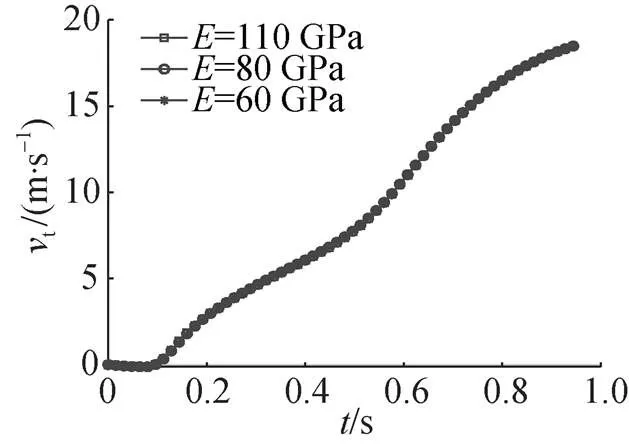
圖18 鋼纜彈性變化下魚(yú)雷速度曲線
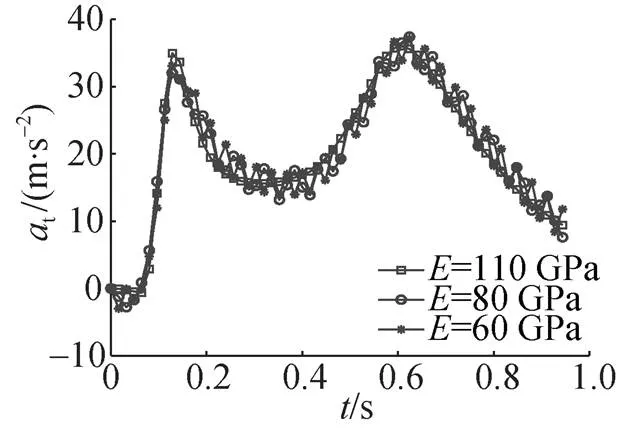
圖19 鋼纜彈性變化下魚(yú)雷加速度曲線

圖20 鋼纜彈性變化下鋼纜拉力線曲
4 結(jié)束語(yǔ)
針對(duì)現(xiàn)有水下魚(yú)雷發(fā)射方案的不足, 文中提出一種適用于UUV的水下鋼纜拖拽式魚(yú)雷發(fā)射方案, 在此基礎(chǔ)上建立了魚(yú)雷內(nèi)彈道數(shù)學(xué)模型, 并進(jìn)行了數(shù)值仿真計(jì)算, 對(duì)仿真結(jié)果分析可知: 使用該方案發(fā)射魚(yú)雷在原理上是可行的, 魚(yú)雷內(nèi)彈道指標(biāo)滿足UUV發(fā)射要求, 且該方案的魚(yú)雷出管速度優(yōu)于自航式發(fā)射方案; 發(fā)射氣瓶初始充氣壓力對(duì)魚(yú)雷內(nèi)彈道有較大影響, UUV航速、魚(yú)雷質(zhì)量以及鋼纜彈性模量對(duì)魚(yú)雷內(nèi)彈道影響較小。
相較于提拉缸式發(fā)射, 文中方案的長(zhǎng)行程氣水缸使滑塊對(duì)魚(yú)雷做功距離更長(zhǎng), 從而減小了魚(yú)雷尾部的瞬間作用力, 相對(duì)降低了對(duì)魚(yú)雷尾部的結(jié)構(gòu)強(qiáng)度要求。但與傳統(tǒng)發(fā)射裝置, 如氣動(dòng)不平衡式魚(yú)雷發(fā)射裝置和往復(fù)泵水壓平衡式魚(yú)雷發(fā)射裝置相比, 文中方案中魚(yú)雷尾部會(huì)受到集中載荷作用, 不如傳統(tǒng)發(fā)射方案受力均勻, 因此這對(duì)魚(yú)雷尾部殼體強(qiáng)度提出了較高要求。此外, 方案中采用的柵狀管以及滑輪機(jī)構(gòu)使整個(gè)發(fā)射系統(tǒng)徑向尺寸增大, 對(duì)發(fā)射系統(tǒng)的布局需要進(jìn)行重新考慮, 這也是該方案的另一不足之處。
以上所做工作還僅是鋼纜拖拽發(fā)射方案原理可行性的仿真驗(yàn)證, 后續(xù)將展開(kāi)對(duì)鋼纜拖拽式發(fā)射方案的進(jìn)一步優(yōu)化設(shè)計(jì)以及完成方案虛擬樣機(jī)的建模與仿真, 以便更好地為鋼纜拖拽魚(yú)雷發(fā)射方案的總體設(shè)計(jì)提供理論支撐。
[1] 藍(lán)仁恩, 馬艷麗, 蔡菀. 水下無(wú)人發(fā)射平臺(tái)發(fā)展綜述[J]. 飛航導(dǎo)彈, 2015, (5): 58-61.
[2] 杜方鍵, 張永峰, 張志正, 等. 水中無(wú)人作戰(zhàn)平臺(tái)發(fā)展現(xiàn)狀與趨勢(shì)分析[J]. 科技創(chuàng)新與應(yīng)用, 2019, (27): 6-10.
[3] 劉洋, 孫顯鵬, 徐超, 等. 無(wú)人水下航行器控制技術(shù)的發(fā)展[J]. 艦船電子工程, 2019, 39(10): 5-10.
Liu Yang, Sun Xian-peng, Xu Chao, et al. Development of Unmanned Underwater Vehicle Control Technology[J]. Ship Electronic Engineering, 2019, 39(10): 5-10.
[4] 王蓬. 軍用UUV的發(fā)展與應(yīng)用前景展望[J]. 魚(yú)雷技術(shù), 2009, 17(2): 5-9.
Wang Peng. Development of Military UUV and Application Prospect Forecast[J]. Torpedo Technology, 2009, 17 (2): 5-9.
[5] 錢(qián)東. 美國(guó)未來(lái)的大型UUV—MANTA[J]. 魚(yú)雷技術(shù), 2003, 11(1): 47-50, 55-57.
Qian Dong. The Large-scale Unmanned Undersea Vehicles by the US in the Future[J]. Torpedo Technology, 2003, 11(1): 47-50, 55-57.
[6] 孫玉松, 李宗吉, 練永慶. UUV魚(yú)雷發(fā)射裝置的選型設(shè)計(jì)[J]. 四川兵工學(xué)報(bào), 2014, 35(8): 36-38.
Sun Yu-song, Li Zong-ji, Lian Yong-qing. Selection and Design of UUV Torpedo Launcher[J]. Sichuan Armamentary Society, 2014, 35(8): 36-38.
[7] 練永慶, 李春來(lái), 李宗吉. 水下橡膠彈性發(fā)射魚(yú)雷內(nèi)彈道仿真[J]. 海軍工程大學(xué)學(xué)報(bào), 2016, 28(6): 100-106.
Lian Yong-ying, Li Chun-lai, Li Zong-ji. Interior Ballistic Simulation of Underwater Rubber Elastic Launching Tor- pedo[J]. Journal of Naval Engineering University, 2016, 28(6): 100-106.
[8] 郭煜, 李宗吉, 任蕾, 等. 提拉缸式魚(yú)雷發(fā)射裝置內(nèi)彈道仿真[J]. 魚(yú)雷技術(shù), 2015, 23(5): 394-400.
Guo Yu, Li Zong-ji, Ren Lei, et al. Interior Ballistic Si- mulation of Push-Pull Cylinder Torpedo Launcher[J]. Tor- pedo Technology, 2015, 23(5): 394-400.
[9] 練永慶, 王樹(shù)宗. 魚(yú)雷發(fā)射裝置設(shè)計(jì)原理[M]. 北京: 國(guó)防工業(yè)出版社, 2012.
[10] 閏晴霄, 李鵬永, 常書(shū)麗. 鋼絲繩氣缸式彈射裝置陸上及水下發(fā)射內(nèi)彈道對(duì)比分析[J]. 艦船科學(xué)技術(shù), 2018, 40(8): 141-143.
Ni Qing-xiao, Li Peng-yong, Chang Shu-li. Comparation Analysis of Internal Ballistics of Steel Wire-Cylinder Ejection Device on Land and Underwater[J]. Ship Science and Technology, 2018, 40(8): 141-143.
[11] 王保國(guó), 劉淑艷. 氣體動(dòng)力學(xué)[M]. 北京: 北京理工大學(xué)出版社, 2012.
[12] 練永慶, 田兵, 陳宜輝. 一種氣動(dòng)發(fā)動(dòng)機(jī)進(jìn)氣控制閥的仿真與實(shí)驗(yàn)[J]. 魚(yú)雷技術(shù), 2011, 19(3): 236-240.
Lian Yong-qing, Tian Bing, Chen Yi-hui. Simulation and Experiment of a Pneumatic Engine Air Intake Control Valve[J]. Torpedo Technogy, 2011, 19(3): 236-240.
[13] 張維佳, 劉鶴年. 水力學(xué)[M]. 北京: 中國(guó)建筑工業(yè)出版社, 2015.
[14] 金友兵, 邵大燮, 薛曉中. 魚(yú)雷的水下運(yùn)動(dòng)分析[J]. 彈道學(xué)報(bào), 1999, 11(1): 37-41.
Jin You-bing, Shao Da-xie, Xue Xiao-zhong. Analysis of Underwater Movement of Torpedo[J]. Journal of Ballis- tics, 1999, 11(1): 37-41.
[15] 徐勤超, 練永慶, 王樹(shù)宗. 自航魚(yú)雷發(fā)射裝置管體結(jié)構(gòu)參數(shù)對(duì)內(nèi)彈道的影響[J]. 彈箭與制導(dǎo)學(xué)報(bào), 2011, 31(4): 128- 132.
Xu Qin-chao, Lian Yong-qing, Wang Shu-zong. The Effect of Structural Parameters of Swim-out Torpedo Laun- cher on Interior Trajectory[J]. Journal of ballistics and guidance, 2011, 31(4): 128-132.
[16] 盧尚禮, 徐洪亮. 鋼絲繩彈性模量測(cè)定引伸儀的研制[J]. 金屬制品, 2004, 30(6): 45-47.
Lu Shang-li, Xu Hong-liang. Development of Extensor for Measuring Elastic Modulus of Steel Wire Rope[J]. Metal Products, 2004, 30(6): 45-47.
Interior Ballistic Simulation of Underwater Steel Cable Towed Launch Torpedo
CHEN Zong-yang1, LIAN Yong-qing1, LI Ang2
(1. Department of Weaponry Engineering, Naval University of Engineering, Wuhan 430033, China; 2. Unit 92336th, The People’s Liberation Army of China, Sanya 572000, China)
In view of the limitations of the existing torpedo scheme launched by unmanned undersea vehicles(UUVs), namely the low tube-exit speed of the torpedo, inability to ensure the smooth exit of the torpedo after start-up failure, and large instantaneous thrust on the torpedo, a basic structural scheme is proposed for the underwater steel cable towed launch torpedo. The proposed scheme is simple and compatible with the self-launching scheme. Based on the launch scheme, the internal ballistic model of the underwater steel cable towed launch torpedo was established, including the gas state model of the launching air bottle, mathematical models of the launch valve, air-water cylinder, and towing device, and torpedo motion model. A launch process simulation was performed. In addition, the factors influencing the internal ballistic path of the torpedo launch, such as the initial filling pressure of the launch air bottle, UUV speed, and elastic modulus of the steel cable, were analyzed. The simulation results demonstrate that the scheme meets the requirements of the UUV launch torpedo, is feasible in principle, and possesses a structure that can solve the problem of emergency torpedo launch when the torpedo fails to exit the tube owing to the failure of self-launching, thereby reducing the structural strength requirement of the torpedo tail to a certain extent.
unmanned undersea vehicle; torpedo; steel cable tow; interior ballistic; launch
陳宗楊, 練永慶, 李昂. 水下鋼纜拖拽發(fā)射魚(yú)雷內(nèi)彈道仿真[J]. 水下無(wú)人系統(tǒng)學(xué)報(bào), 2022, 30(2): 209-215.
TJ630.2
A
2096-3920(2022)02-0209-07
10.11993/j.issn.2096-3920.2020.02.011
2021-05-10;
2021-06-09.
陳宗楊(1995-), 男, 在讀碩士, 主要研究方向?yàn)樗斜骺傮w及發(fā)射技術(shù).
(責(zé)任編輯: 楊力軍)