
考慮多諧波分量傳遞誤差的斜齒輪非線性振動分析
2022-05-12 06:09:40王方,吳偉,李超
機電工程技術 2022年3期
王 方,吳 偉,李 超
(西安石油大學機械工程學院,西安 710065)
0 引言
齒輪傳動是通過齒輪副來實現運動和動力傳遞的裝置,在現代機械傳動中被廣泛應用[1-2]。在系統運行過程中,由于間隙[3]、時變嚙合剛度[4]和齒輪傳動誤差[5-6]等非線性因素的存在,齒輪傳動系統的傳動精度將受到很大的影響,所以對齒輪系統非線性動力學進行研究顯得尤為重要。王三民等[7]建立了含齒面摩擦、時變嚙合剛度和傳動誤差因素的非線性動力學模型,并采用數值積分方法求得系統的周期響應和混沌響應。程歐等[8]構建了多自由度的多間隙齒輪系統振動模型,通過數值方法對系統的微分方程進行求解,分析了不同激勵頻率下系統的混沌特性。肖偉中、茍向鋒等[9-10]通過考慮嚙合剛度、復雜交變載荷、設計和制造誤差等的因素,構建了在復雜激勵下的三自由度斜齒輪動力學模型并通過數值積分法對動力學模型進行求解,繼而在此基礎上分析了齒輪參數的改變對系統動力學特性的影響。
以上文獻中,學者為了計算方便,只考慮靜態傳遞誤差的一階諧波分量,而忽略高次諧波分量。而根據實驗證明,齒輪輪齒的誤差激勵與齒輪噪聲和振動密切相關,高次諧波分量不能被忽略[11]。本文將使用Romax軟件對斜齒輪傳動系統進行建模,通過靜力學分析得到含多次諧波分量的靜態傳遞誤差。建立了計及剛度激勵、齒側間隙和靜態傳遞誤差等非線性因素的斜齒輪系統純扭轉動力學模型,將求得的含多諧波分量的靜態傳遞誤差帶入系統的狀態方程,基于數值積分的方法對系統狀態方程進行求解,在此基礎上分析了阻尼比、負載和間隙對斜齒輪系統動力學特性的影響。
1 斜齒輪系統的動力學模型
1.1 建立斜齒輪系統的力學模型及運動微分方程
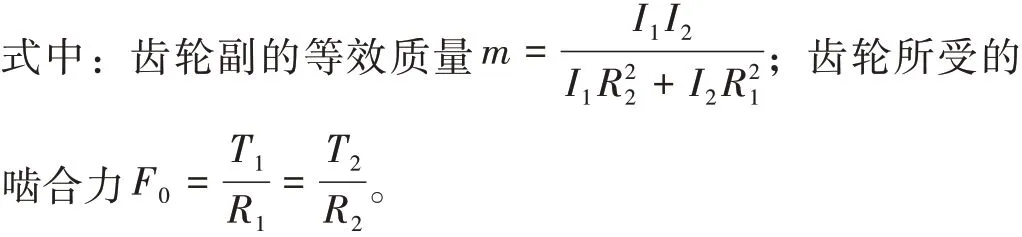
在多自由度振動系統中,僅考慮斜齒輪系統的扭轉振動,不會對系統產生大的誤差,其仍滿足工程需要[12]。采用集中質量法可建立如圖1所示的單自由度斜齒輪系統扭轉型模型。其中θ1、θ2分別為主從動齒輪的扭轉振動位移;R1、R2分別是主從動齒輪的基圓半徑;T1、T2分別是作用在主從動齒輪上的外載荷扭矩;I1、I2分別是主從動齒輪的轉動慣量;e(t)為齒輪副的傳動誤差;K(t)為時變嚙合剛度。
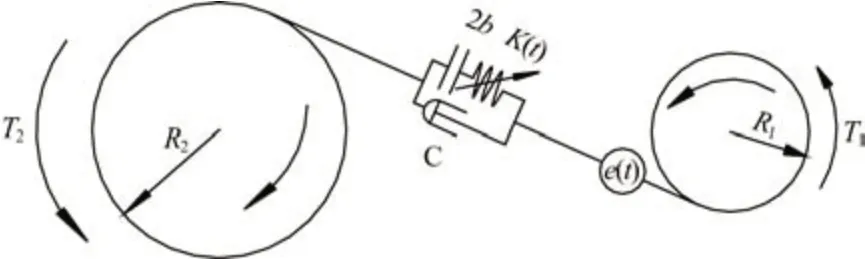
圖1 齒輪副動力學模型
斜齒輪傳動系統基本參數如表1所示。

表1 斜齒輪基本參數
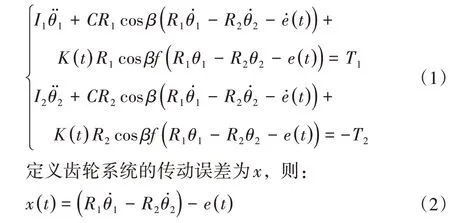
根據牛頓定律,建立單自由度斜齒輪傳動系統運動微分方程:將式(2)代入式(1)可得:

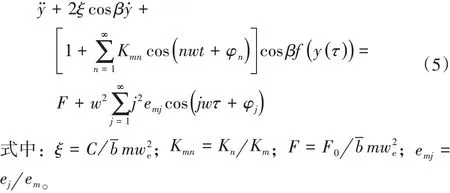
由于嚙合剛度系數、傳動誤差系數和阻尼的數量級相差較大,會對方程的求解帶來不便,因此需要對方程進行無綱量化處理。定義無量綱時間τ=wet,無量綱位移無量綱激勵頻率w=wn/we,其中we為齒輪的固有頻率,求解公式為:經過無綱量化處理過的微分方程如下:

1.2 齒輪傳遞誤差
靜態傳遞誤差是齒輪系統發生噪聲與振動的激勵源之一。本文運用Romax軟件對斜齒輪傳動系統進行建模。其中,軸是傳動系統中的重要零部件,其在工作過程中,會產生扭轉或者彎曲變形,嚴重時會影響傳動系統運行的平穩性,因此要對軸進行可靠性校核。本文所用軸的材料是45鋼,許用彎曲應力為60 MPa。在輸入軸端施加80 N·m的轉矩,軸的轉速為3 000 r∕min。
通過對軸進行靜力學分析,得到輸入輸出軸的合成應力如圖2所示。由圖可知,在安裝齒輪的位置,輸入軸和輸出軸所受的合成應力最大,其所受最大的合成彎曲應力分別為σca1=32,σca2=18,可以看出,輸入軸和輸出軸的最大彎曲應力都小于軸的彎曲許用應力,滿足軸的強度要求準則。

圖2 軸的靜力學分析
通過對模型進行靜力學分析得到斜齒輪系統的靜態傳遞誤差,曲線如圖3所示。考慮斜齒輪嚙合傳動過程中的傳遞誤差是周期性的,為了便于分析系統的動態響應,因此利用Matlab將靜態誤差曲線擬合成傅里葉級數的形式以便計算分析,其中所得齒輪副嚙合誤差展開系數如表2所示。

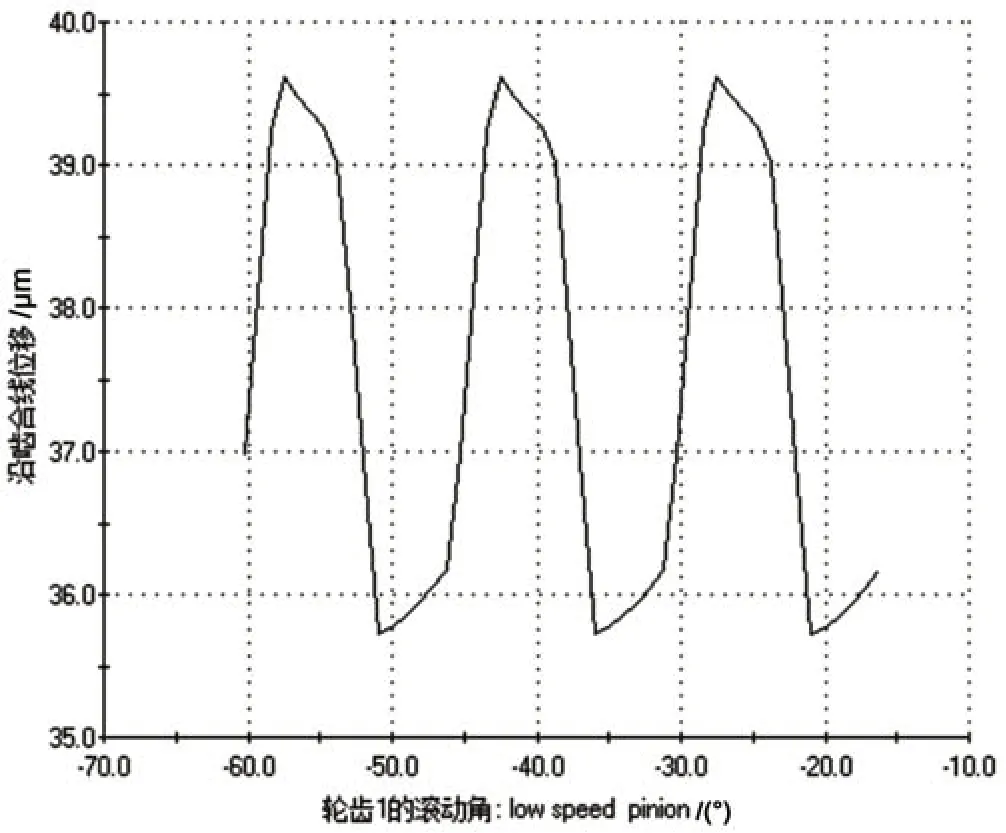
圖3 傳遞誤差

表2 齒輪副嚙合誤差系數
1.3 齒輪時變嚙合剛度
本文假設沿接觸線上的載荷分布均勻,此時,嚙合線長度的變化和嚙合剛度的變化成正比[13],單個齒對的時變嚙合剛度的表達式為:

式中:l(t)為嚙合線接觸長度;Kl為轉換系數,Kl=Km/L;Km為平均嚙合剛度;L為平均嚙合線長度[14];l(t)為嚙合線接觸長度。
在齒輪工作時,一般有多對輪齒參與嚙合,鄰輪齒的嚙合點相差一個端面基節,得到多對齒嚙合剛度曲線如圖4所示。將同一時刻同位置上的嚙合剛度進行疊加,即可獲得斜齒輪的時變嚙合剛度。

圖4 不同齒對嚙合剛度
由于嚙合剛度是周期性變化的,可將嚙合剛度用傅里葉級數的形式進行描述。其傅里葉展開曲線如圖5所示,由圖可看出,前5階傅里葉展開曲線與原剛度曲線基本貼合,精度滿足一般工作要求。展開系數如表3所示。

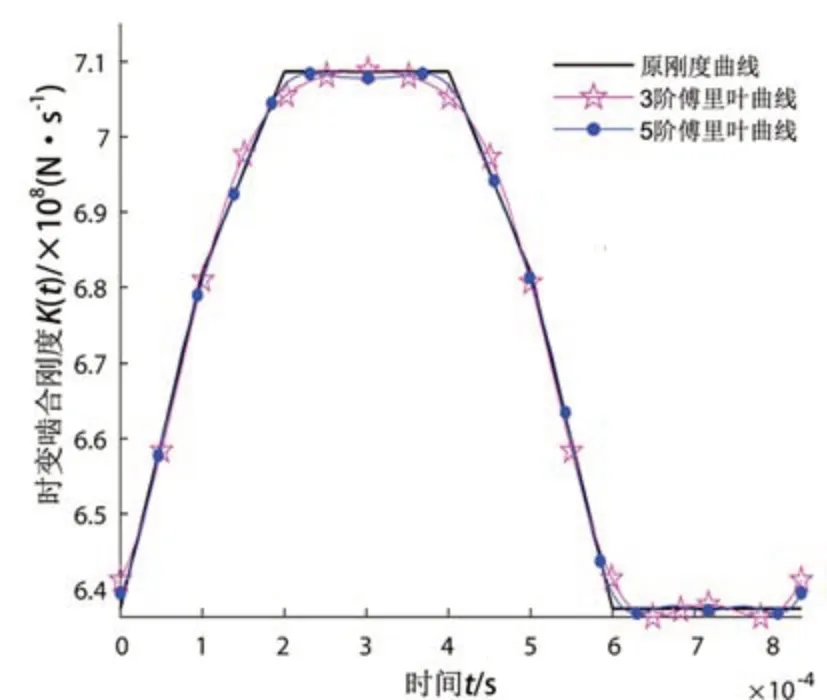
圖5 傅里葉展開曲線

表3 齒輪時變嚙合剛度系數
1.4 齒側間隙
齒輪工作時,側隙能夠防止齒輪因摩擦或過熱而產生卡死,但同時它也會造成齒間沖擊,嚴重影響了齒輪傳動系統的平穩性。側隙[15]在動力學研究中屬于強非線性因素,在進行動力學研究時不能被忽略,其函數表達式為:
式中:b為單側齒側間隙,它是以嚙合線為基準進行測量的。
2 斜齒輪系統動態性能分析
將微分方程(5)轉化為狀態方程為:

狀態方程中含有齒側間隙、時變嚙合剛度和傳遞誤差等非線性因素,其求解比較困難。對于非線性方程的求解方法,常用的有解析法和數值法。由于數值方法的計算精度高且適用范圍廣,本文使用數值方法[16]對方程進行求解。
令w=0.85,F=5.211 3,b=4.5,ξ=0.13,將具有一階諧波分量的靜態傳遞誤差和5階諧波分量的靜態傳遞誤差分別帶入系統的狀態方程,并利用變步長Rung-Kutta數值積分方法對系統狀態方程進行求解,得到系統在兩種情況下的加速度響應如圖6所示。由圖可看出,與只考慮一階諧波分量的靜態傳遞誤差所得出的系統加速度響應圖相比,具有多階諧波分量的靜態傳遞誤差所得出的加速度幅值較大,且波形變化較為復雜。在斜齒輪逐漸嚙合并傳動過程中,存在著單齒對嚙合到多齒對嚙合的過渡,此時系統會產生加速度突變現象,如圖所示存在尖點,其是斜齒輪傳動過程中形成噪聲和沖擊振動的首要原因。所以不能忽略靜態傳遞誤差的高次諧波分量。
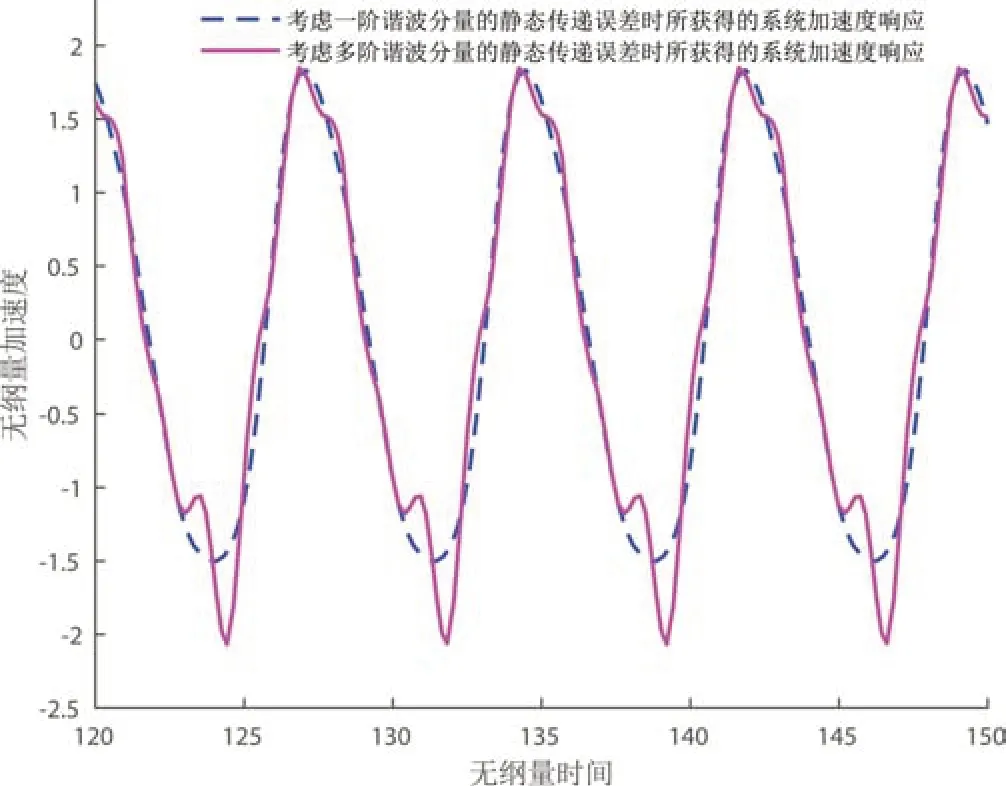
圖6 加速度響應
將含有5階諧波分量的靜態傳遞誤差代入狀態方程中并進行求解,得到了該響應系統的動態響應如圖7所示。
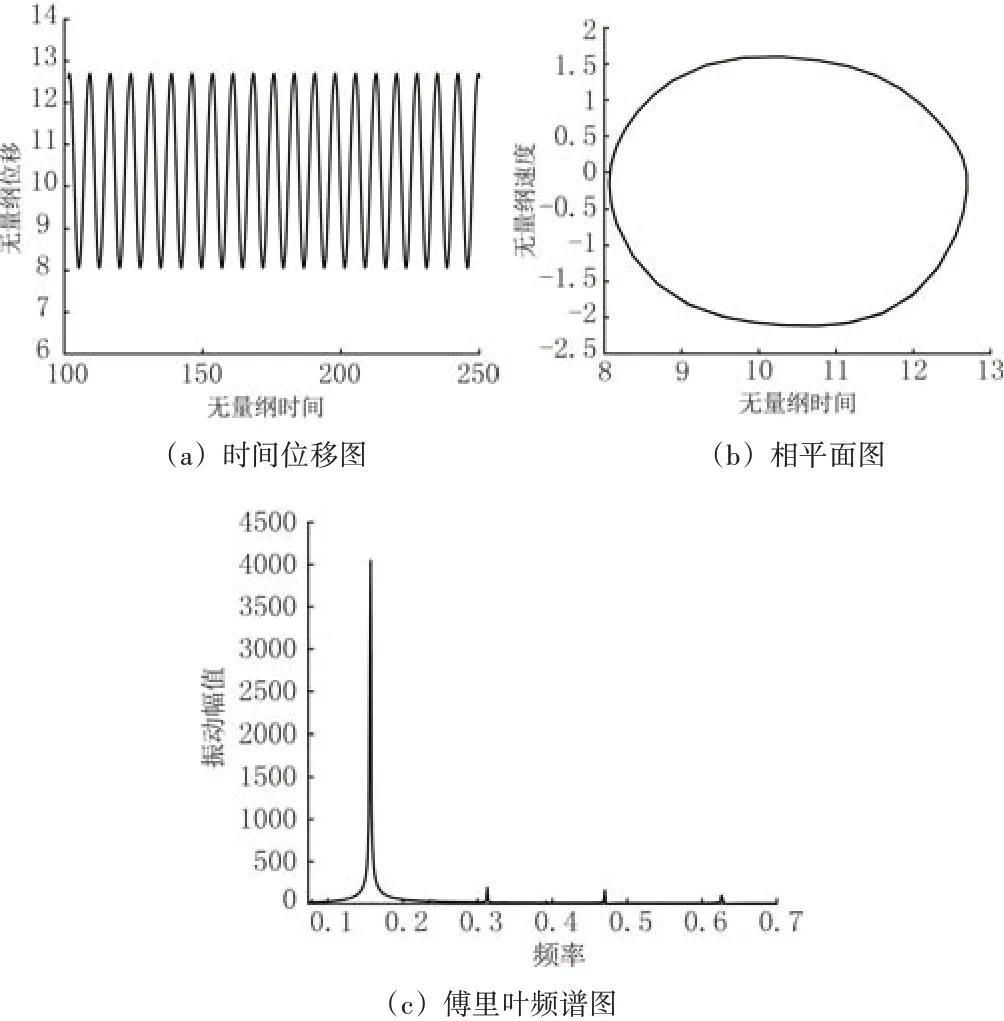
圖7 系統的動態響應
由圖7(a)可知,系統響應的時間歷程是周期性的,相比于非周期,其有利于降低系統的振動、減少系統的噪音,使系統運行平穩,進而提高斜齒輪傳動系統的使用壽命。
根據圖7(b)可知,斜齒輪傳動系統的相平面圖為一閉合曲線,說明系統是周期響應,其所得結果與時間歷程圖一致。
在如圖7(c)所示的頻譜圖中,由于時變嚙合剛度、誤差激勵和間隙非線性影響因素的存在,因此系統含有多頻響應成分。
2.1 阻尼比對動態性能的影響
保持齒輪傳動系統其他參數不變,在ξ∈( )0,0.5的范圍內,系統隨阻尼比的全局分岔圖如圖8所示,由圖可見,隨著阻尼比的增大,齒輪系統動態響應經歷了從混沌、多周期運動到單周期運動狀態。在阻尼比ξ<0.04階段,系統處于混沌狀態,運動非常不平穩,且會受到較大的振動和沖擊;當阻尼比ξ=0.04時,系統進入多周期運動狀態,混沌狀態減弱,系統的振動和沖擊減小;當ξ=0.09時,系統開始平穩運行。
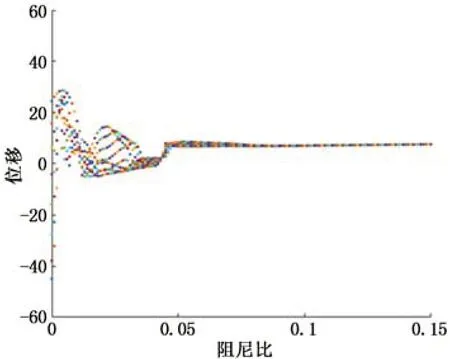
圖8 系統隨阻尼比變化的分岔圖
在該過程中,系統的運動相圖如圖9所示,從圖中可以看出,阻尼比的增大有利于弱化系統的非線。從系統傅里葉頻譜(圖10)中可以得知,由于阻尼比的增加,系統響應幅值明顯減小,因此,阻尼比在一定程度上可以抑制響應幅值。

圖9 系統相圖
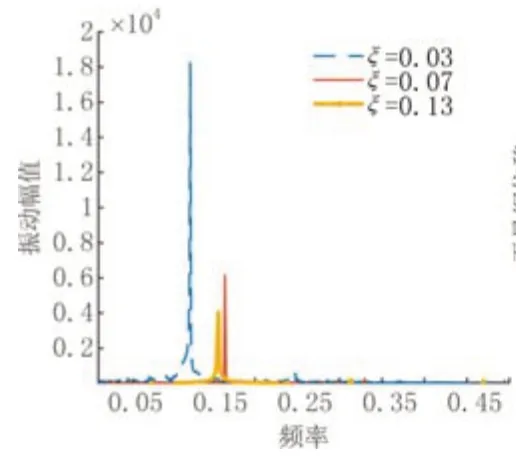
圖10 系統FFT頻譜圖
2.2 負載對動態性能的影響
保持齒輪傳動系統其他參數不變,負載F分別取3、5和9時,得到系統的時域圖和頻譜圖,從時域圖11可以看出,隨著負載的增大,無量綱位移增大并有整體上移的趨勢。從頻譜圖12可以看出,隨著負載的增大,系統振動幅值明顯增大。所以,齒輪所處的載荷狀態對動力學的影響較大。

圖11 系統時域圖
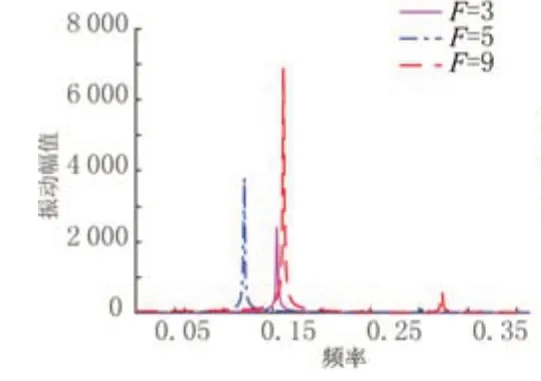
圖12 系統FFT頻譜圖
2.3 間隙對動態性能的影響
保持齒輪傳動系統其它值不變,當間隙b分別取10、20和30時,得到系統的時域圖如圖13所示。從圖中可以看出,隨著間隙的增大,系統的無量綱位移顯著增大,且具有上移趨勢。所以,減小間隙有利于系統平穩運行。
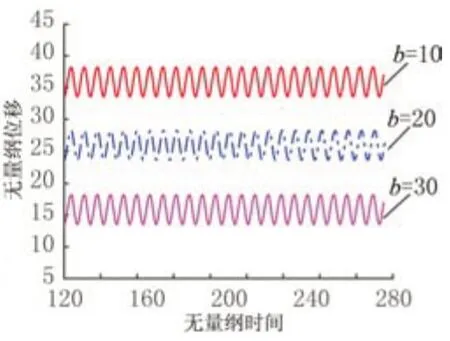
圖13 系統時域圖
3 結束語
本文運用Romax軟件對斜齒輪傳動系統進行建模,通過對模型進行靜力學分析得到斜齒輪系統的含多諧波分量的靜態傳遞誤差,建立了計及齒側間隙、剛度激勵和靜態傳遞誤差的斜齒輪動力學模型,將含一階諧波分量和多階諧波分量的靜態傳遞誤差分別帶入到系統的狀態方程,基于變步長Rung-Kutta數值積分方法對非線性動力學模型進行數值求解,對比所得到的加速度相應圖可知,靜態傳遞誤差的高諧波分量對系統的振動有較大的影響。在考慮多諧波分量靜態傳遞誤差的基礎上分析了阻尼比、載荷和側隙對齒輪傳動系統動力學特性的影響,結果如下。
(1)阻尼比的增大,有利于弱化齒輪傳動系統的非線性,并能在一定程度上抑制響應幅值,有利于系統的平穩運行。
(2)在齒輪運行過程中,載荷的狀態對系統的動力學特性有很大的影響。隨著載荷的增大,無量綱位移增大并有整體上移的趨勢,并且響應幅值明顯增大。
(3)隨著側隙的增大,無綱量位移增大。減小側隙能夠在一定程度上減小系統的振動。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
艦船科學技術(2022年8期)2022-06-05 07:36:28
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
