
床邊下肢康復(fù)機(jī)器人結(jié)構(gòu)設(shè)計(jì)與仿真分析*
2022-05-12 06:10:40羅承開(kāi)韋建軍王春寶劉銓權(quán)
機(jī)電工程技術(shù) 2022年3期
關(guān)鍵詞:康復(fù)
羅承開(kāi),韋建軍※,王春寶,,劉銓權(quán)
(1.廣西科技大學(xué)機(jī)械與交通工程學(xué)院,廣西柳州 545000;2.深圳市老年醫(yī)學(xué)研究所,廣東深圳 518000)
0 引言
隨著我國(guó)老齡人口的增加,老齡化所引起的一系列問(wèn)題也越發(fā)尖銳。我國(guó)每年腦卒中導(dǎo)致偏癱患者新增200萬(wàn),由于治療師短缺,大部分的腦卒中患者早期未得到有效的治療,使得患者的病情加劇,嚴(yán)重影響他們的生活[1]。腦卒中早期的患者由于臥床不便移動(dòng),而康復(fù)黃金期為腦卒中病發(fā)后的前3個(gè)月,所以早期介入和患者的主動(dòng)參與對(duì)于患者的康復(fù)和后續(xù)的治療起到非常好的效果。治療師進(jìn)行傳統(tǒng)床邊康復(fù)訓(xùn)練時(shí),每次進(jìn)行的手法與力度不相同,患者主動(dòng)參與率低,且對(duì)于患者治療效果的評(píng)估很大程度上依賴治療師的臨床判斷和主觀經(jīng)驗(yàn),對(duì)病人的當(dāng)前恢復(fù)現(xiàn)狀沒(méi)有得到及時(shí)和準(zhǔn)確的判斷,使得治療師無(wú)法針對(duì)患者的康復(fù)現(xiàn)狀確定科學(xué)的治療周期。
腦卒中對(duì)于大腦以及肢體的影響如圖1所示,由于大腦受損,患者的一側(cè)肢體喪失運(yùn)動(dòng)能力,而另一側(cè)則正常[2-3]。反復(fù)肢體運(yùn)動(dòng)訓(xùn)練是促進(jìn)神經(jīng)環(huán)路再生重組及加強(qiáng)突觸間聯(lián)系的有效途徑之一[4]。
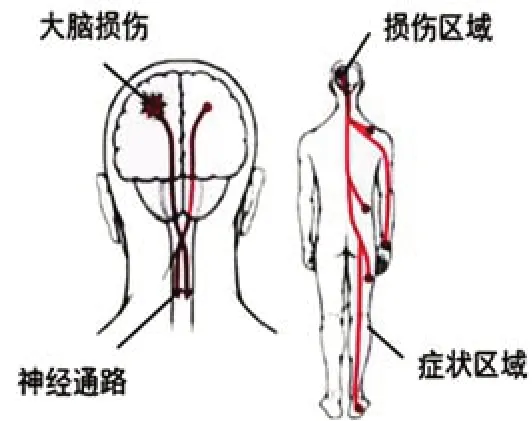
圖1 卒中影響區(qū)域
日本筑波大學(xué)的Atsushi Tsukahara[5]研制的robot suit HAL能夠幫助完全截癱患者實(shí)現(xiàn)下肢的坐-站轉(zhuǎn)換以達(dá)到康復(fù)訓(xùn)練效果,能適應(yīng)患者的各個(gè)康復(fù)期。意大利Rimec公司研制的Fisiotek下肢被動(dòng)運(yùn)動(dòng)訓(xùn)練器通過(guò)滑塊的往復(fù)運(yùn)動(dòng)來(lái)帶動(dòng)人體下肢作屈伸運(yùn)動(dòng),達(dá)到康復(fù)訓(xùn)練的目的。吉林大學(xué)劉坤等[6]研制的懸吊式下肢康復(fù)裝置用于輔助患者的站起康復(fù)訓(xùn)練,能夠幫助患者實(shí)現(xiàn)站立訓(xùn)練。澤普醫(yī)療的智能主被動(dòng)床旁下肢康復(fù)機(jī)專為臥床患者下肢康復(fù)而設(shè)計(jì),采用可移動(dòng)的康復(fù)終端理念,實(shí)現(xiàn)床邊下肢康復(fù)的可能。具有被動(dòng)、助力、主動(dòng)、主被動(dòng)、痙攣緩解等訓(xùn)練模式。綜上所述,目前的康復(fù)機(jī)器人大多適用于具有一定站立能力或站立能力的患者,很少有臥床患者相應(yīng)的下肢訓(xùn)練裝置,且主動(dòng)參與率低。也無(wú)法對(duì)患者進(jìn)行阻抗訓(xùn)練和進(jìn)行信息采集及時(shí)優(yōu)化訓(xùn)練過(guò)程。
針對(duì)現(xiàn)有訓(xùn)練裝置的不足,旨在解決臥床患者難以得到有效訓(xùn)練、訓(xùn)練精度低等問(wèn)題。本文提出了一種床邊下肢康復(fù)機(jī)器人,如圖2所示,采用等長(zhǎng)二連桿機(jī)構(gòu),實(shí)現(xiàn)患者在床邊特定區(qū)域的水平往返運(yùn)動(dòng)。在連桿上安裝同步帶輪,實(shí)現(xiàn)由單個(gè)電機(jī)帶動(dòng)多個(gè)自由度的方式。該機(jī)器人結(jié)構(gòu)簡(jiǎn)單、能適應(yīng)不同身高的患者,并提供多種訓(xùn)練模式,能實(shí)時(shí)采集患者訓(xùn)練數(shù)據(jù)及時(shí)優(yōu)化。
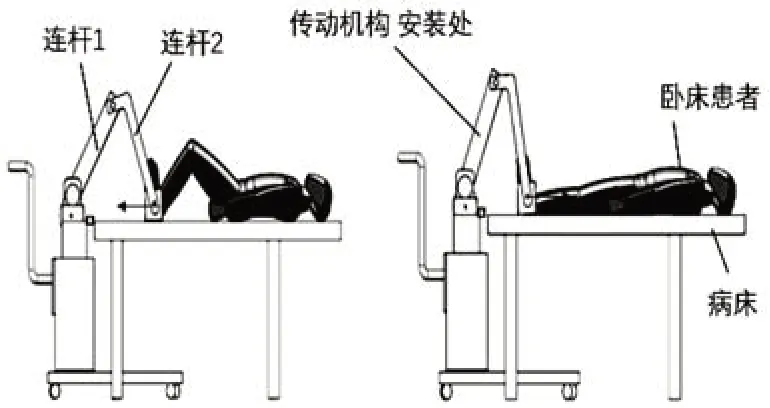
圖2 總體方案
1 設(shè)計(jì)要求
人體下肢是由髖關(guān)節(jié)、膝關(guān)節(jié)、踝關(guān)節(jié)以及大腿、小腿和足組成[7-8],人體下肢的運(yùn)動(dòng)即為骨骼繞著相應(yīng)的關(guān)節(jié)轉(zhuǎn)動(dòng)。如圖3所示。

圖3 人體下肢模型
患者康復(fù)訓(xùn)練時(shí),人體下肢各個(gè)關(guān)節(jié)的角度在變化,患者康復(fù)訓(xùn)練時(shí)下肢關(guān)節(jié)的角度變化范圍應(yīng)該在關(guān)節(jié)運(yùn)動(dòng)范圍之內(nèi),否則在康復(fù)訓(xùn)練時(shí)會(huì)造成損傷。人體下肢髖關(guān)節(jié)、膝關(guān)節(jié)、踝關(guān)節(jié)在矢狀面的運(yùn)動(dòng)角度如表1所示[9]。
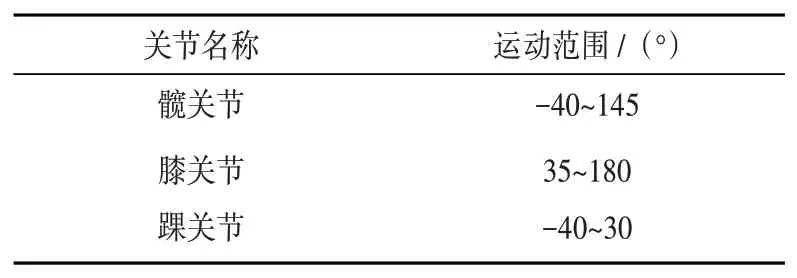
表1 人體下肢各關(guān)節(jié)活動(dòng)范圍
由于人體的差異,因此在設(shè)計(jì)時(shí)應(yīng)再考慮到患者的腿部的具體參數(shù)。根據(jù)GB 10000—88中給出我國(guó)成年人下肢參數(shù)。康復(fù)機(jī)器人涉及參數(shù)如表2所示。
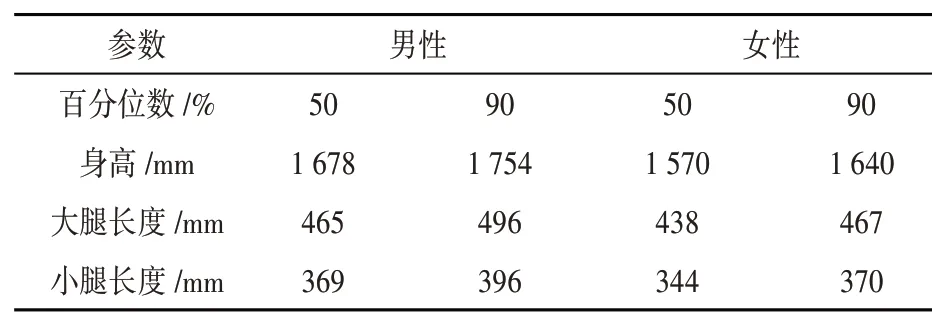
表2 人體下肢相關(guān)參數(shù)
由百分位數(shù)可知,中國(guó)男性成年人的身高位于1 678~1 754 mm的人數(shù)最多,達(dá)到40%。為提高其適用性和基于機(jī)構(gòu)運(yùn)動(dòng)可靠性考慮,現(xiàn)在選取身高為1 754 mm的患者,即大腿長(zhǎng)度為496 mm、小腿長(zhǎng)度為396 mm作為相應(yīng)機(jī)構(gòu)尺寸設(shè)計(jì)參考。
2 機(jī)構(gòu)設(shè)計(jì)
2.1 確定方案
研究表明,腿部的屈伸以及伴隨著的踝關(guān)節(jié)與髖關(guān)節(jié)的運(yùn)動(dòng),可以提高靜脈回血壓力[10],加速患者腿部功能的康復(fù),使僵硬的腿部肌肉變得靈活[11]。總體方案如圖4所示。
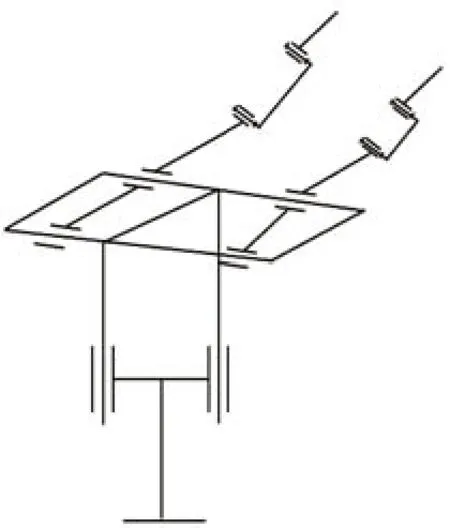
圖4 機(jī)構(gòu)總體方案
傳動(dòng)機(jī)構(gòu)的方案設(shè)計(jì)如圖5所示,原動(dòng)件運(yùn)動(dòng)方向如圖中箭頭所示,采用傳動(dòng)比為i=-1的傳動(dòng)方式,即同步帶輪Ⅰ、Ⅱ、Ⅲ、Ⅳ的齒數(shù)滿足如下關(guān)系式:
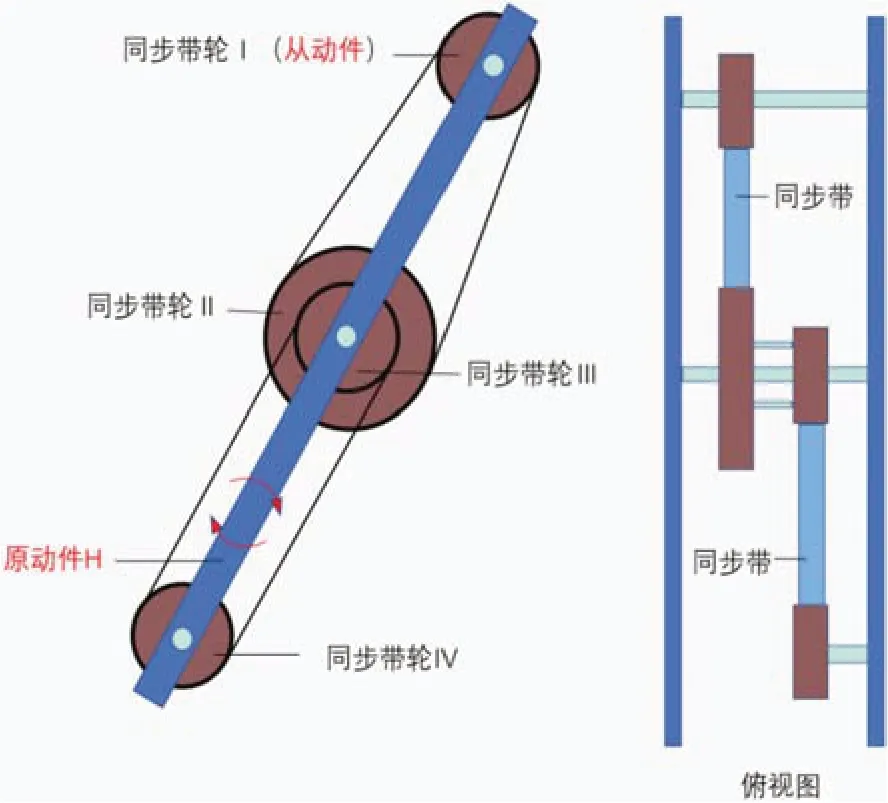
圖5 傳動(dòng)機(jī)構(gòu)方案

2.2 確定結(jié)構(gòu)尺寸
康復(fù)訓(xùn)練結(jié)構(gòu)簡(jiǎn)圖(單側(cè))如圖6所示,小腿的長(zhǎng)度LCD=396 mm,大腿的長(zhǎng)度LDF=496 mm,當(dāng)訓(xùn)練處于屈膝極限狀態(tài)時(shí),膝關(guān)節(jié)活動(dòng)的最小角度β=35°。
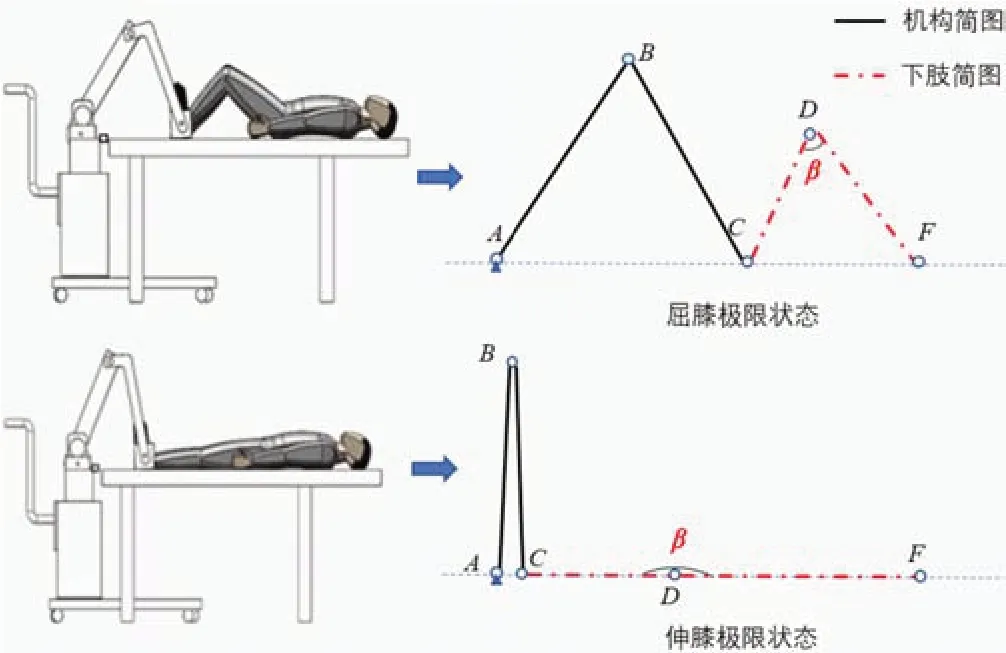
圖6 康復(fù)訓(xùn)練結(jié)構(gòu)簡(jiǎn)圖
由余弦定理有:

當(dāng)訓(xùn)練處于伸膝極限狀態(tài)時(shí),β=180°,此時(shí)LCF=892 mm,在伸膝與屈膝狀態(tài)下LCF的差值等于606 mm。設(shè)初始角度β=60°,故訓(xùn)練時(shí)要達(dá)到膝關(guān)節(jié)的極限位置,則轉(zhuǎn)動(dòng)臂的設(shè)計(jì)尺寸不應(yīng)小于606 mm。此時(shí)機(jī)構(gòu)執(zhí)行末端在水平方向上的位移為606 mm。將轉(zhuǎn)動(dòng)臂的尺寸L設(shè)計(jì)為606 mm。在實(shí)際的康復(fù)訓(xùn)練中,很少對(duì)膝關(guān)節(jié)的極限位置進(jìn)行訓(xùn)練,即伸膝極限狀態(tài)的訓(xùn)練,可適當(dāng)調(diào)節(jié)初始角度β的角度值,即可實(shí)現(xiàn)在膝關(guān)節(jié)運(yùn)動(dòng)范圍內(nèi)的任意角度的訓(xùn)練。
2.3 總體結(jié)構(gòu)設(shè)計(jì)
床邊下肢康復(fù)機(jī)器人總體設(shè)計(jì)如圖7所示。主要由小車、升降柱、絲杠調(diào)節(jié)組件和相同的左、右訓(xùn)練機(jī)構(gòu)組成。此設(shè)計(jì)能使患者通過(guò)左訓(xùn)練機(jī)構(gòu)和右訓(xùn)練機(jī)構(gòu)對(duì)患者下肢進(jìn)行康復(fù)訓(xùn)練,而且還能夠根據(jù)設(shè)置在腳踏板上的壓力傳感器采集到的受力狀況,及時(shí)優(yōu)化訓(xùn)練過(guò)程。進(jìn)行康復(fù)訓(xùn)練時(shí),由治療師推動(dòng)該機(jī)器人置于病床床尾處與病床固定,并將患者的足部置于腳踏板上由綁帶綁緊。
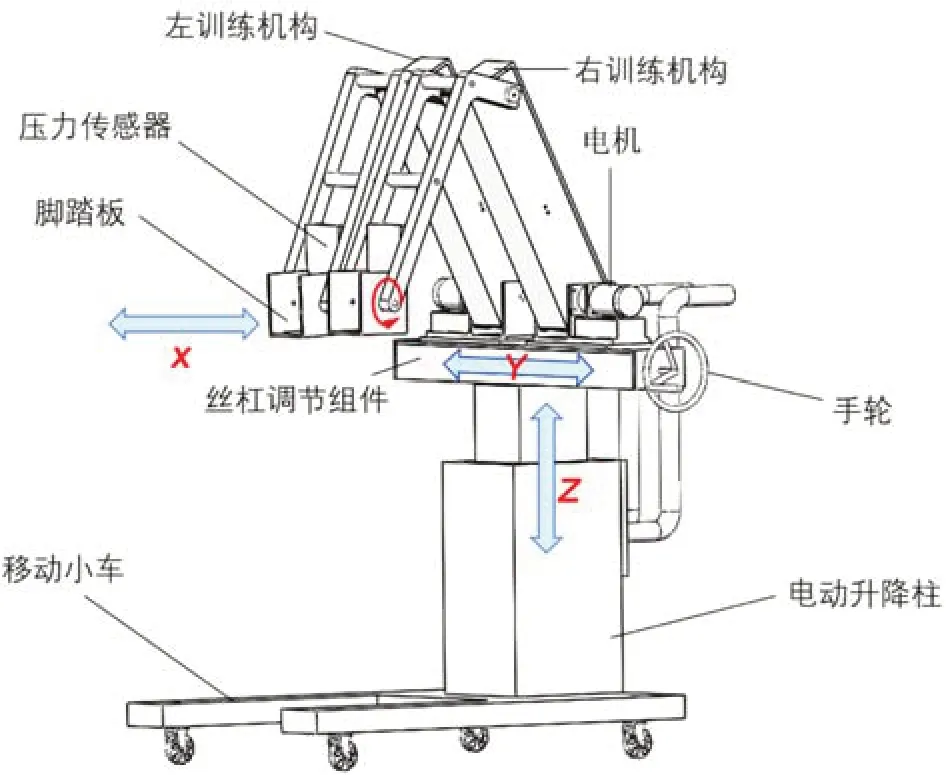
圖7 下肢康復(fù)機(jī)器人總體結(jié)構(gòu)
該下肢康復(fù)機(jī)器人具有主動(dòng)、被動(dòng)兩種訓(xùn)練模式,可根據(jù)下肢肌力的大小選擇不同的訓(xùn)練模式[12],腦卒中前期的患者,下肢大多沒(méi)有運(yùn)動(dòng)能力,需進(jìn)行被動(dòng)訓(xùn)練,由電機(jī)驅(qū)動(dòng)轉(zhuǎn)動(dòng)臂轉(zhuǎn)動(dòng)帶動(dòng)患者下肢運(yùn)動(dòng)。康復(fù)訓(xùn)練中后期,下肢的運(yùn)動(dòng)能力有所恢復(fù),可采取主動(dòng)訓(xùn)練,通過(guò)患者下肢肌力克服電機(jī)阻力運(yùn)動(dòng),達(dá)到訓(xùn)練的目的。也可以采取健患側(cè)結(jié)合訓(xùn)練。
康復(fù)機(jī)器人(單側(cè))具有3個(gè)自由度:電機(jī)驅(qū)動(dòng)使得腳踏板沿X軸水平方向的往返運(yùn)動(dòng),實(shí)現(xiàn)患者的伸屈膝訓(xùn)練;搖動(dòng)手輪可沿著Y軸水平方向運(yùn)動(dòng),可調(diào)節(jié)距離以適應(yīng)患者不同寬度的骨盆,且對(duì)于腦卒中早期不宜移動(dòng)的臥床患者,也可適當(dāng)?shù)恼{(diào)節(jié)距離使其能在正確的位置做康復(fù)訓(xùn)練;升降柱可沿著Z軸豎直方向升高或降低,可用于患者康復(fù)后期加大對(duì)髖關(guān)節(jié)的訓(xùn)練力度和適當(dāng)?shù)卣{(diào)整患者足部的高度。
2.4 轉(zhuǎn)動(dòng)臂設(shè)計(jì)
在康復(fù)訓(xùn)練過(guò)程中,為了避免轉(zhuǎn)動(dòng)臂之間產(chǎn)生干涉,將靠近床一端的轉(zhuǎn)動(dòng)臂設(shè)計(jì)成L型,其三維模型如圖8(a)所示,L型轉(zhuǎn)動(dòng)臂的兩端分別與U型轉(zhuǎn)動(dòng)臂和腳踏板連接。轉(zhuǎn)動(dòng)臂之間可相對(duì)旋轉(zhuǎn)。
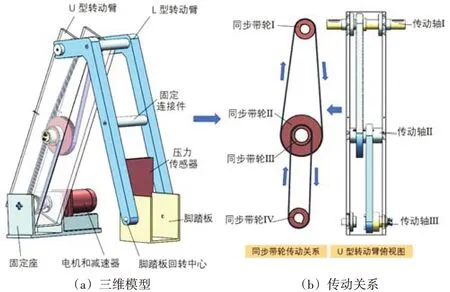
圖8 轉(zhuǎn)動(dòng)臂總體設(shè)計(jì)
在與L型轉(zhuǎn)動(dòng)臂連接的另一端設(shè)計(jì)有U型轉(zhuǎn)動(dòng)臂,在U型槽內(nèi)安裝有同步帶輪。U型轉(zhuǎn)動(dòng)臂的一端與固定座連接,可繞著固定座做回轉(zhuǎn)運(yùn)動(dòng)。當(dāng)電機(jī)驅(qū)動(dòng)U型轉(zhuǎn)動(dòng)臂轉(zhuǎn)動(dòng)時(shí),使得同步帶輪帶動(dòng)L型轉(zhuǎn)動(dòng)臂轉(zhuǎn)動(dòng)。當(dāng)進(jìn)行被動(dòng)訓(xùn)練時(shí)(由屈膝到伸膝),具體傳動(dòng)關(guān)系如圖8(b)所示。
在U型槽中安裝同步帶輪處自上而下標(biāo)記為傳動(dòng)軸Ⅰ、傳動(dòng)軸Ⅱ、傳動(dòng)軸Ⅲ,下面將對(duì)其進(jìn)行討論。
(1)傳動(dòng)軸Ⅰ
傳動(dòng)軸Ⅰ安裝有同步帶輪Ⅰ,通過(guò)鍵將扭矩傳遞到L型轉(zhuǎn)動(dòng)臂,兩端加工有螺紋孔,由螺釘固定端蓋防止L型轉(zhuǎn)動(dòng)臂軸向竄動(dòng),其剖視圖如圖9所示。
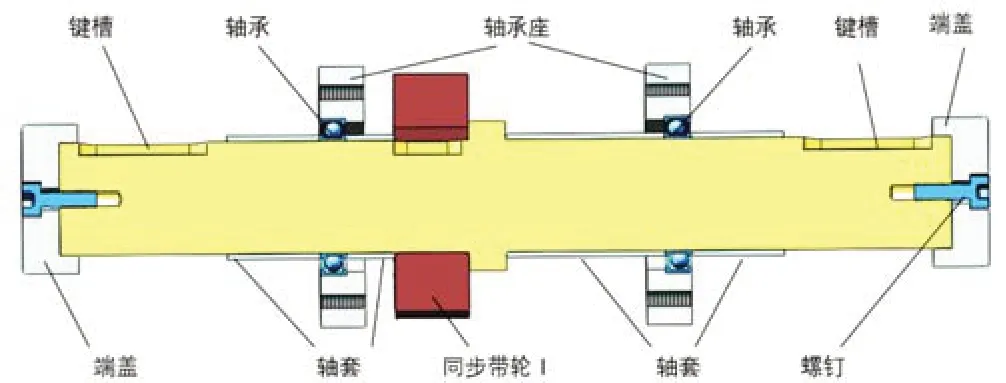
圖9 傳動(dòng)軸Ⅰ
(2)傳動(dòng)軸Ⅱ
傳動(dòng)軸Ⅱ的剖視圖如圖10所示,同步帶輪Ⅱ和同步帶輪Ⅲ由螺栓連接同步轉(zhuǎn)動(dòng),軸的兩端加工有螺紋孔,由螺釘固定在U型槽內(nèi)。

圖10 傳動(dòng)軸Ⅱ剖視圖
(3)傳動(dòng)軸Ⅲ
傳動(dòng)軸Ⅲ與同步帶輪Ⅳ通過(guò)螺釘固定,傳動(dòng)軸Ⅲ在右端由螺釘連到在固定座上。電機(jī)輸出軸通過(guò)鍵傳遞扭矩到U型轉(zhuǎn)動(dòng)臂,從而帶動(dòng)同步帶輪轉(zhuǎn)動(dòng),其轉(zhuǎn)動(dòng)關(guān)系如圖11。
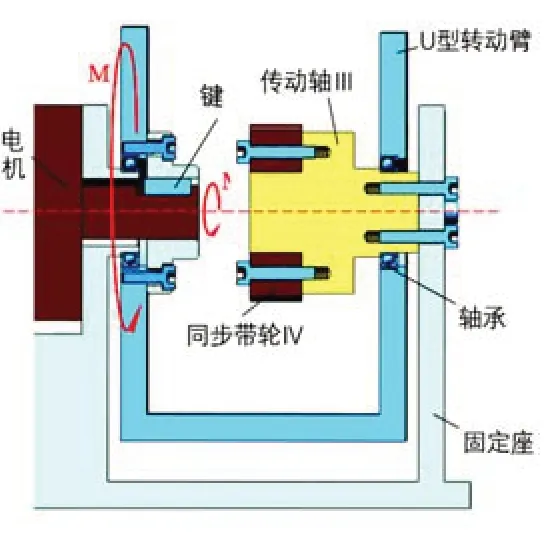
圖11 傳動(dòng)軸Ⅲ
3 運(yùn)動(dòng)學(xué)分析
下肢二連桿運(yùn)動(dòng)模型如圖12所示,L1、L2分別U型轉(zhuǎn)動(dòng)臂、L型轉(zhuǎn)動(dòng)臂長(zhǎng)度。s為OB的長(zhǎng)度。θi(i=1,2)為桿OA與桿AB與水平方向的夾角。
由圖12所示封閉的矢量三角形OAB可寫出其矢量方程:
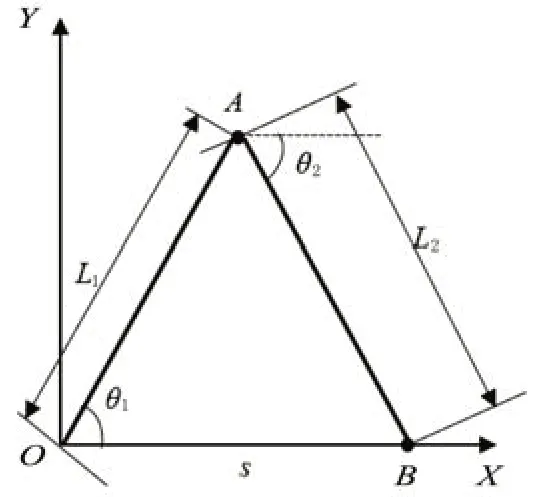
圖12 下肢二連桿運(yùn)動(dòng)模型

其復(fù)數(shù)形式表示為:

由歐拉公式eix=cos(x)+isin(x)得

將式(5)關(guān)于時(shí)間求導(dǎo),得:

式中:ω1、ω2、ν分別為桿OA的角速度、桿AB的角速度和末端的速度。
由式(6)再對(duì)時(shí)間求導(dǎo),整理可得:

式中:a2、a1、a2分別為桿OA的角加速度、桿AB的角加速度和機(jī)構(gòu)末端的加速度。
4 信息采集與仿真分析
4.1 試驗(yàn)對(duì)象信息采集
本研究隨機(jī)選取10名腦卒中患者作為研究對(duì)象,其基本信息如表3所示,這些試驗(yàn)者均是自愿參加試驗(yàn),且了解試驗(yàn)?zāi)康募霸囼?yàn)方法。
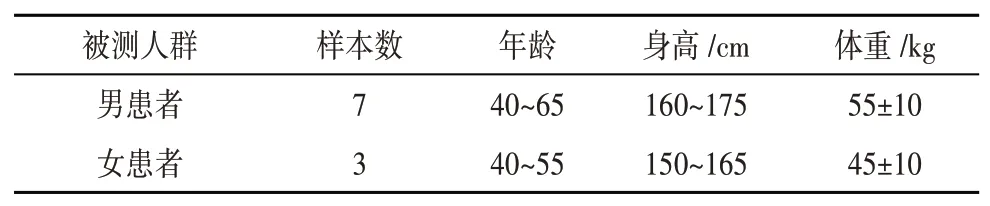
表3 受試者基本信息
圖13所示為腦卒中患者模擬下肢康復(fù)訓(xùn)練過(guò)程(患側(cè)),由于大腦損傷,腦卒中患者下肢的運(yùn)動(dòng)能力遠(yuǎn)不如健康者。

圖13 患者試驗(yàn)過(guò)程
試驗(yàn)采集以下患者數(shù)據(jù)如表4所示,即患者完成一次屈膝∕伸膝所需要的時(shí)間,患者做6次伸膝∕屈膝,分別記錄所需要的時(shí)間,取平均數(shù)。由表可知,腦卒中患者下肢屈膝∕伸膝的頻率大約為6 s∕次,其中患者E和患者G為高度偏癱且肌張力過(guò)高,下肢主動(dòng)訓(xùn)練無(wú)法完成。

表4 被測(cè)對(duì)象完成一次屈膝/伸膝所需時(shí)間s
4.2 被動(dòng)訓(xùn)練時(shí)的人機(jī)學(xué)模型仿真分析
在腦卒中患者的被動(dòng)訓(xùn)練中,調(diào)整U型轉(zhuǎn)動(dòng)臂角度α=60°,患者處于屈膝狀態(tài)。患者康復(fù)訓(xùn)練時(shí),由屈膝到伸膝。當(dāng)α=80°,患者完成伸膝訓(xùn)練,開(kāi)始進(jìn)行屈膝訓(xùn)練,當(dāng)α=60°患者完成屈膝訓(xùn)練。利用SolidWorks建立人機(jī)學(xué)模型并進(jìn)行運(yùn)動(dòng)仿真分析。選取百分位數(shù)最大的成年男性(身高1 754 mm,大腿長(zhǎng)度為496 mm,小腿長(zhǎng)度為396 mm)為研究對(duì)象。在SolidWorks中建立的人機(jī)學(xué)模型,如圖14所示。
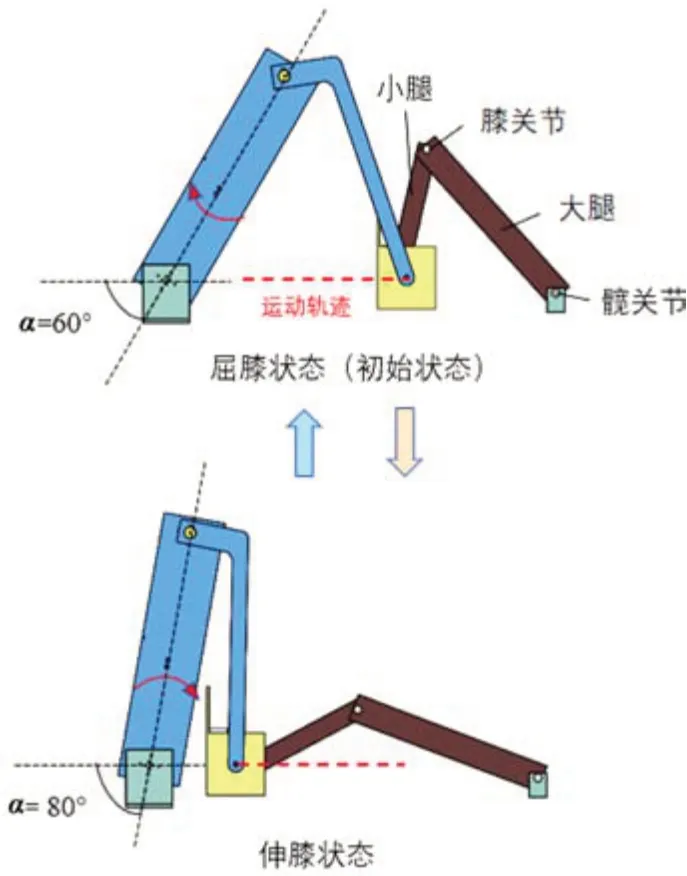
圖14 被動(dòng)訓(xùn)練時(shí)人機(jī)學(xué)模型
當(dāng)患者進(jìn)行訓(xùn)練的頻率為10次∕min時(shí),即患者做一次屈膝∕伸膝訓(xùn)練時(shí)間為6 s時(shí),由傳動(dòng)關(guān)系添加驅(qū)動(dòng),患者進(jìn)行被動(dòng)訓(xùn)練時(shí),設(shè)定電機(jī)的輸出角速度ω=10 sin(-πt/3),t∈(0~6)。仿真時(shí)間為6 s。
康復(fù)訓(xùn)練時(shí),患者的足部與腳踏板由綁帶固定,其速度與加速度曲線如圖15所示。從圖中可以看出,患者足部在水平方向上的運(yùn)動(dòng)平緩,加速度并無(wú)突變現(xiàn)象,速度的平均值132 mm∕s,峰值為198 mm∕s。正常成年人的步頻為90~120 steps∕min,步行時(shí)足部在垂直方向上的平均速度約為200 mm∕s,康復(fù)機(jī)器人訓(xùn)練速度峰值小于正常人步行時(shí)在豎直方向的平均速度,不會(huì)對(duì)患者的腿部造成不適。腦卒中患者下肢在康復(fù)初期普遍肌張力較高,可適當(dāng)將訓(xùn)練速度調(diào)小,隨著下肢運(yùn)動(dòng)功能的恢復(fù),康復(fù)中后期可將訓(xùn)練參數(shù)調(diào)整至正常人的步態(tài)參數(shù)訓(xùn)練。
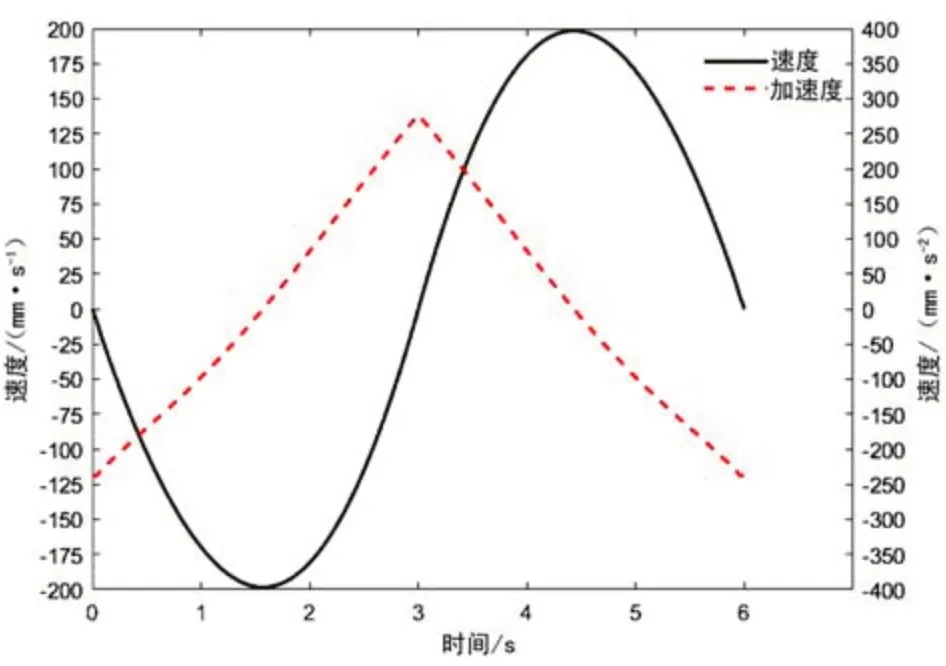
圖15 機(jī)構(gòu)末端速度、加速度曲線
在訓(xùn)練過(guò)程中,患者的關(guān)節(jié)在矢狀面內(nèi)的角度變化如圖16所示。膝關(guān)節(jié)和髖關(guān)節(jié)在矢狀面內(nèi)角度變化范圍分別為(55°~134°)和(25°~51°),由表1所示的下肢關(guān)節(jié)活動(dòng)角度可知,均在各關(guān)節(jié)活動(dòng)變化范圍內(nèi),不會(huì)對(duì)患者造成二次損傷。
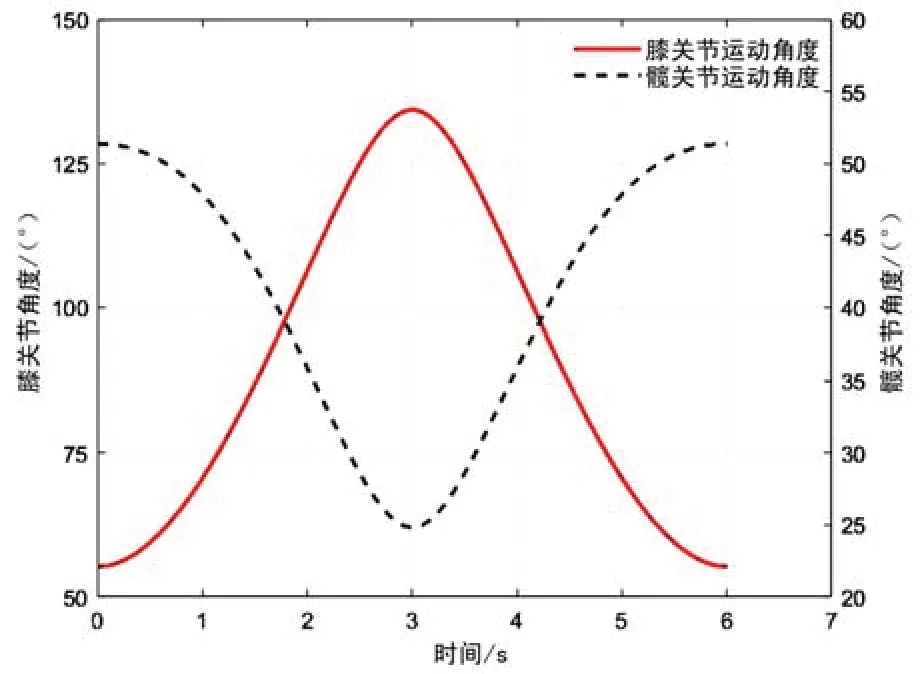
圖16 膝關(guān)節(jié)、髖關(guān)節(jié)活動(dòng)角度
為了讓患者在使用康復(fù)機(jī)器人時(shí)感到舒適,應(yīng)盡量減少對(duì)膝關(guān)節(jié)的沖擊力,如圖17所示。膝關(guān)節(jié)加速度與角加速度,角加速度的最小值為-36(°)∕s2,角加速度最大值為88(°)∕s2。角加速度連續(xù)變化,不存在突變的情況,由此表明,該康復(fù)機(jī)器人具有較強(qiáng)的穩(wěn)定性。
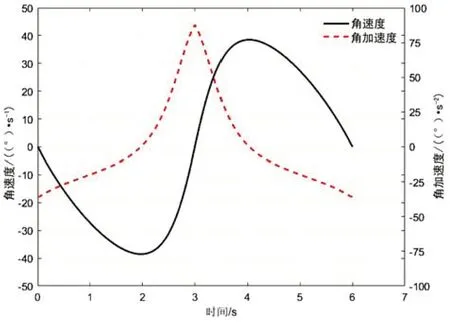
圖17 膝關(guān)節(jié)角速度、角加速度曲線
5 結(jié)束語(yǔ)
本文研究了一種床邊下肢康復(fù)機(jī)器人。在保證對(duì)患者不會(huì)造成二次傷害的前提下,實(shí)現(xiàn)了對(duì)患者的下肢進(jìn)行被動(dòng)訓(xùn)練、主動(dòng)訓(xùn)練和健患側(cè)結(jié)合訓(xùn)練等,解決了早期中風(fēng)患者由于臥床下肢無(wú)法得到有效訓(xùn)練的問(wèn)題。對(duì)機(jī)器人進(jìn)行了詳細(xì)的結(jié)構(gòu)設(shè)計(jì)。建立人機(jī)學(xué)模型進(jìn)行仿真分析,驗(yàn)證了該康復(fù)機(jī)器人可靠性與平穩(wěn)性,更加符合人體下肢關(guān)節(jié)訓(xùn)練康復(fù)的需求。未來(lái)的工作將完善結(jié)構(gòu)設(shè)計(jì)及控制系統(tǒng);此外,還將加工裝配該康復(fù)機(jī)器人并進(jìn)行試驗(yàn),驗(yàn)證該下肢康復(fù)機(jī)器人的有效性。
猜你喜歡
康復(fù)(2023年11期)2023-11-20 07:45:54
康復(fù)(2023年14期)2023-11-20 06:04:54
中老年保健(2021年4期)2021-08-22 07:08:14
護(hù)理與康復(fù)(2021年2期)2021-03-05 08:10:44
家庭醫(yī)學(xué)(下半月)(2020年1期)2020-05-11 02:05:46
廣東醫(yī)科大學(xué)學(xué)報(bào)(2020年6期)2020-02-06 06:00:56
特別健康(2018年2期)2018-06-29 06:13:44
反射療法與康復(fù)醫(yī)學(xué)(2017年7期)2017-01-16 01:11:02
中國(guó)衛(wèi)生(2014年6期)2014-11-10 02:30:50
中國(guó)中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年23期)2014-03-01 04:33:45
