
一種改進的RRT路徑規劃算法*
2022-05-12 06:10:56王稷堯袁鋒偉
機電工程技術 2022年3期
王稷堯,袁鋒偉
(南華大學機械工程學院,衡陽 421001)
0 引言
隨著智能機器人不斷發展,路徑規劃問題研究越來越深入。路徑規劃指機器人在當前環境中按照一定的標準,搜索出一條從起始狀態點到目標狀態點,能夠繞開障礙物的最優或次優路徑[1]。根據其原理不同,路徑規劃算法有人工勢場法[2]、神經網絡法[3]、遺傳算法[4]等。其中,以RRT算法為代表的采樣規劃算法,通過一個初始點作為根節點,采用隨機采樣的方式增加樹結構的分支,當分支節點包含目標節點或進入目標區域,即可快速生成一條由樹節點生成的從初始點到目標點的路徑,具有概率完備性,在多障礙物的復雜場景應用較多[5]。
北京工業大學的阮曉鋼等[6],提出了一種基于信息增益與RRT思想相結合的機器人環境探索策略,增強機器人對未知環境的探索降,低傳統RRT算法固有的盲目性。昆明理工大學的胡兵等[1],在可變步長的隨機樹生長過程中,引入雙向生長策略,利用雙向生長特性,提高路徑搜索效率,解決了最優路徑與低效率間的矛盾。林依凡等[7]提出了一種無碰撞檢測RRT*運動規劃方法,增強了在復雜環境中的路徑規劃能力。四川大學的仲健寧等[8]提出一種基于多種啟發式策略和強化節點機制改進的高效RRT*路徑規劃算法,該算法提出強化節點機制,擴大節點蘊涵的信息,提高節點利用率。廣東工業大學的何兆楚等[9]利用人工勢場法進行局部路徑規劃,當陷入局部極小值時,使用改進的快速擴展隨機算法自適應地選擇臨時目標點,使搜索過程跳出局部極小值點;當機械臂逃離局部極小值點時,切換回人工勢場法進行規劃。
基于以上的研究分析,根據RRT算法隨機性、無序性的特點,對RRT算法進行選點方式、算法優化、碰撞檢測等方面的改進,提出一種新的路徑規劃算法。本研究以傳統RRT算法與勢場法相結合,對RRT算法加入勢場法、新節點生成策略、狹窄空間算法等,對RRT算法進行進一步優化。由于勢場的影響,檢測到的障礙物會產生斥力場,因此節點生成時函數值過大,會直接將其剔除,因此改進后的RRT算法也不再需要重復進行碰撞檢測,縮短了整體的運算時間。
1 問題分析
1.1 RRT算法原理
經典RRT算法是從狀態空間一初始點出發,通過隨機采樣擴展增加新節點,生成一個隨機擴展樹,當隨機樹中的新節點包含目標點或進入目標區域時,初始點到目標點間至少形成一條以隨機樹新節點組成的路徑[10]。
以二維空間中的RRT算法為例,假設在二維狀態空間C中,引入初始點xinit和目標點xgoal,使得xinit根據快速拓展隨機樹T進行隨機樹的逐步擴建,最終到達xgoal,其過程如圖1所示。
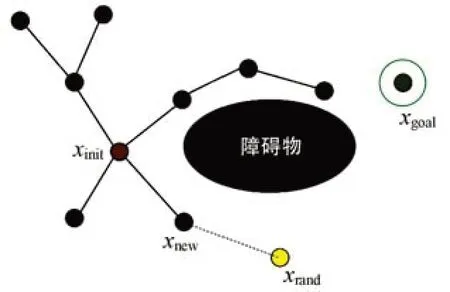
圖1 節點生成策略
狀態空間C中,障礙物所在的區域為障礙區Xob(XobX),其他可通行的區域為通行區Xpa(XpaX)。在工作過程中,RRT算法會從初始點xinit開始逐步通過隨機采樣擴展結點,首先它會選定任意一個父節點,之后根據一個隨機的方向和規定的步長生成一個最近的臨時節點xrand,根據xrand所在位置判定其在Xob(XobX)還是Xpa(XpaX)。若其在障礙區,則該xrand無效:若其在通行區,則可生成一新的父節點xnew。這一過程會一直重復,直到xnew進入目標點xgoal的鄰域范圍Xgoal(XgoalX),表明已成功找到目標點xgoal,進行逆追隨找到連接xinit與xgoal的最短路徑,完成路徑規劃。其偽代碼如表1所示。
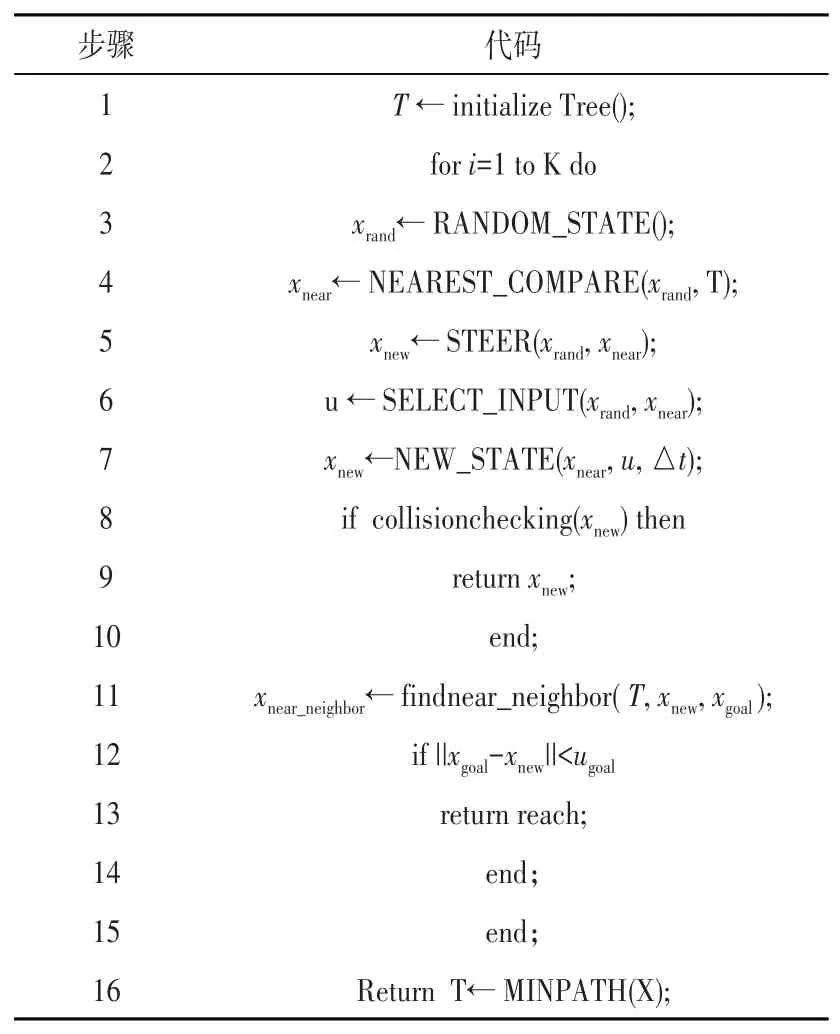
表1 RRT algorithm
隨機樹T生長過程中,函數RANDOM_STATE()會從空間中選取一點;根據函數NEAREST_COMPARE(),會在空間中拓展出一點;經過函數STEER(),SELECT_INPUT(),NEW_STATE()判定后得到隨機樹上的新節點;之后collisionchecking()函數會對其進行碰撞檢測,若滿足條件則生成新節點;最后進行鄰域檢測findnear_neighbor(),若滿足則路徑規劃成功;經過路徑比較函數MINPATH()輸出最優路線。
1.2 實際問題分析
經過實驗測試,傳統的RRT算法依然存在著很多問題。
(1)規劃路徑成功率較低,在測試實驗中,設定最大節點生成個數為1 000個,在圖2實驗中,成功率為70%;在圖3實驗中,成功率僅僅為50%。若想增高成功率,可以設定更多的節點數和減小節點步長,但無疑會加大工作量,延長整體的工作時間。
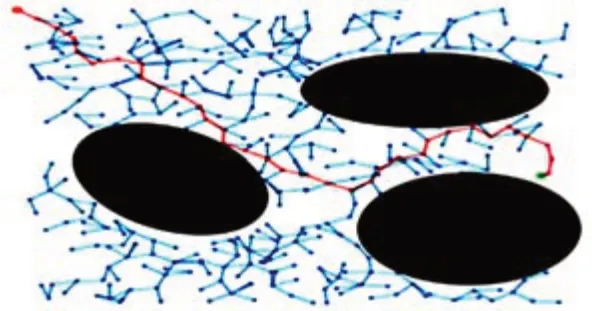
圖2 路徑規劃1

圖3 路徑規劃2
(2)所規劃路徑質量較低,在兩種地圖中,RRT算法雖然都成功完成了路徑規劃任務,但所得到的路徑是非常不理想的,與最優路徑之間還存在著一定的距離,同時所規劃路徑存在過大的轉角,在實際工作過程中,會產生一定程度的震蕩,降低整個工作過程的穩定性。
(3)在狹窄空間中,RRT算法容易陷入無解情況,如圖3所示,由于算法生成策略的隨機性,在狹窄的通路中,當父節點離障礙物較近時,新生成的節點很大概率落入障礙區中,導致選點失敗陷入死循環。
針對于以上的問題,本文提出了一種RRT結合人工勢場軌跡規劃的算法。改進RANDOM_STATE()選點函數,加入引力場和斥力場綜合作用影響和狹窄概率算法,使得生成受到勢場和概率算法的綜合影響。由于勢場的加入,障礙物生成的斥力場會影響到隨機點生成,使得隨機點不會生成在障礙區中,因此改進后的算法不再需要進行碰撞檢測函數collisionchecking(),提高了工作效率。引力場與斥力場的相互作用,使得整個空間中的勢場連續性變化,加之勢場法中對于機器人轉角因素的考慮,減小了路徑規劃中的過大轉角,增強了工作過程的平穩性。在狹窄空間中,狹窄概率算法的加入使得路徑搜索的成功率增大,在面臨復雜地形時整個算法的表現更加出色。
2 算法的改進
2.1 勢場法的引入
針對傳統RRT算法隨機性過大、規劃路徑質量較低的問題,本文提出一種基于傳統RANDOM_STATE()選點函數的增益求解函數。
在傳統的勢場法中,針對于機器人中的路徑規劃問題,經常使用如下的引力函數和斥力函數:

式中:Ua(Pn)為機器人在位置Pn時所受到的引力;Ka為引力系數;Pg為目標點所在位置。

式中:Ur為斥力函數;Kr為斥力系數;ln為機器人各個連桿與障礙物之間的距離;l0為整個斥力場的作用范圍。
根據機器人各個連桿與障礙物之間的距離,就可以很輕松的知道機器人與障礙物是否發生了碰撞,因此在優化選點函數時,可以將兩者的距離差作為條件編入函數,以此省略了之后的collisionchecking()碰撞檢測函數。
對于任意時刻,機器人受到的總勢能為引力勢能與斥力勢能的總和,即:

2.2 選點函數的改進
在RRT算法中,傳統的選點函數如圖4所示,以xnew父節點為中心,初始設定的步長為半徑,得到子節點的出生圓。之后根據隨機方向rand,得到一個新的子節點xrand,再進行碰撞檢測,若滿足工作要求則子節點生成成功。
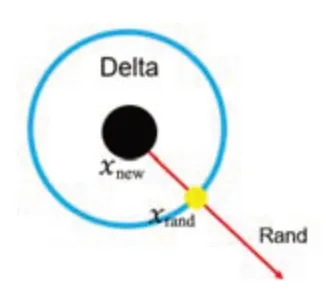
圖4 傳統原理
從其工作原理中可看出,方向的確定是完全隨機的,而且每次生成新的子節點之后都要進行碰撞檢測,雖然拓展性較好,但針對于機器人的復雜工作環境來看,其工作效率很低,選點方式也并不科學。
結合勢場法的思想,如圖5所示,根據實際工作環境設定工作區域,將其分為若干個區域,計算每個區域中的綜合增益,根據增益得到每個區域方向的生成概率,完成最終的子節點生成。綜合增益可表示為:
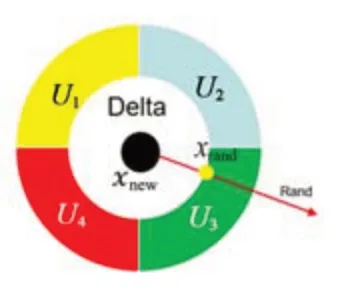
圖5 改進原理

式中:k0為初始增益系數;X0為初始增益,其計算已在經典算法中得出;ku為勢場增益系數;Xui為勢場增益。k0、ku可以根據實際的工作過程進行取值。Xui可表示為:

式中:k?為條件系數,若步長圓內存在障礙物,則取值為0,否則為1;Di為各個區域范圍;U(θ,r)為總勢能函數,其中θ、r可根據實際工作過程進行取值。
根據每部分的增益結果,可得到各區域隨機方向生成的概率為:

改進后的選點函數由于勢場的引導作用,省去了很多無效點的生成和碰撞檢測,使得路徑規劃效率更高,節約了時間。新生成父、子節點之間的轉角不會過大,使得整個路徑更光滑,也更接近理想路徑。
2.3 加入狹窄概率函數
針對于RRT算法在狹窄環境中易陷入無解的情況,有針對性的加入一種狹窄概率函數,其偽代碼如表2所示。
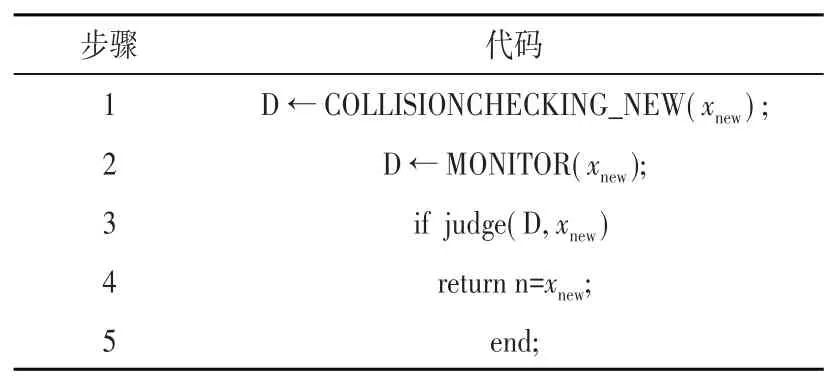
表2 狹義算法
隨機選點函數COLLISIONCHECKING_NEW在工作過程中,狹窄概率函數會同時使用監測函數MONITOR監測新生成的xnew節點,當xnew與D中已經生成的節點之間的距離和位置條件,滿足judge函數時,則會將工作區域個數進行更細劃分,以此找到可能存在的狹窄通路。
RRT算法方向選擇的隨機性和勢場法容易陷入局部死循環的特性,都決定了其對于狹窄路徑規劃存在著弊端。狹窄概率算法很好地解決了狹窄通路難以尋找的問題,使得算法的整體魯棒性增強,優化了路徑規劃過程。
3 實驗驗證
3.1 實驗一
將RRT算法與RRT結合人工勢場軌跡規劃的算法進行仿真實驗,驗證算法的實際工作情況。如圖6~7所示,本次實驗采用Matlab R2016b數學仿真軟件進行,設置多組地圖進行測試。實驗一的部分參數如表3所示。
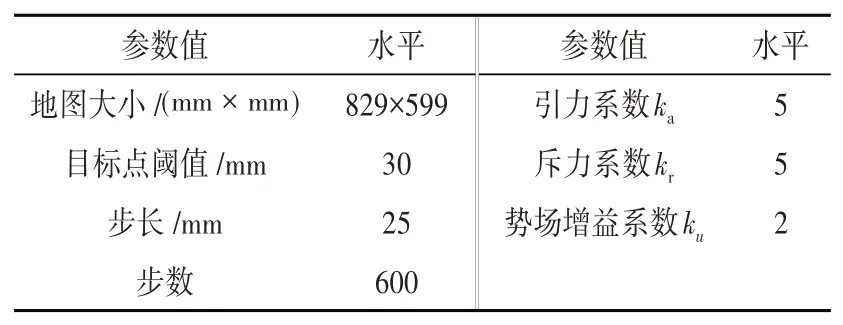
表3 實驗一參數

圖6 傳統算法
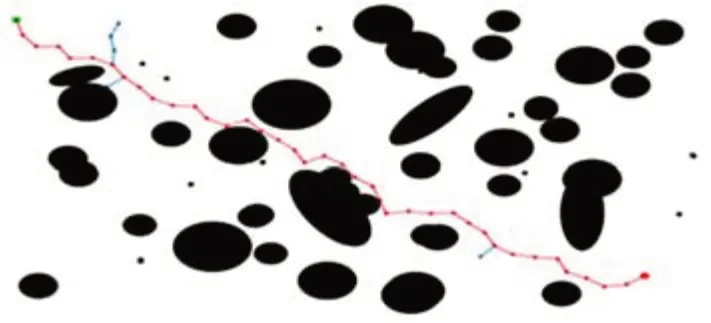
圖7 改進算法
實驗過程中,黑色圖形為隨機設置的障礙物,紅色圓點為初始點xinit,綠色圓點為目標點xgoal,隨機樹生成的節點為藍色圓點,每步之間的距離用藍色線段相連,其中找到的最優路徑用紅色路線標出。
實驗數據對比如表4所示。實驗中的部分數據如表中所示,通過實驗數據可明顯看出,改進后的算法成功率有所提高,在200次實驗中僅有6次沒有成功找到目標點,成功率提高了13%。同時,所產生的節點個數大大減少,改進后算法生成的節點數減少了大約86.22%,因此整體工作效率也得到了很大提高,平均工作時間減少了大約67.6%,同時改進后的算法所找到的路徑質量較高,接近理想路徑的數量更多。
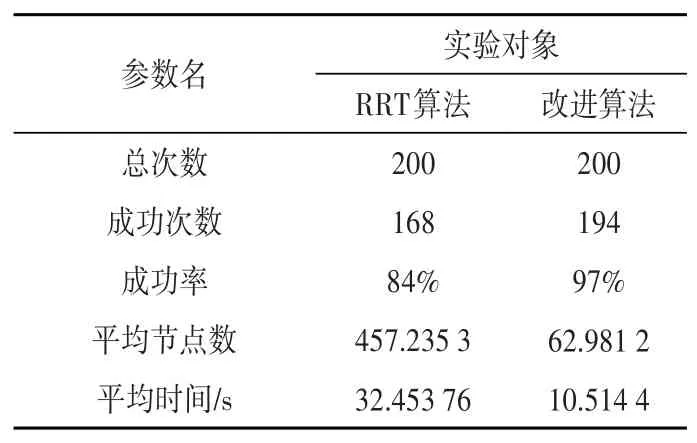
表4 算法比較
綜上所述,改進后的算法在普通環境中能更好地實現路徑規劃,無論是從成功率、節點數還是工作時間上都得到了一定改善,接下來仍要繼續測試在一些特殊條件中算法的表現如何。
3.2 實驗二
在本組實驗中,針對于算法的狹窄空間路徑規劃能力進行測試,如圖8~9所示。采用Matlab R2016b數學仿真軟件進行,建立了整體地形較為狹窄的空間,設置多個復雜、易誘導路徑,模擬實際的工作過程。部分實驗參數如表5所示。
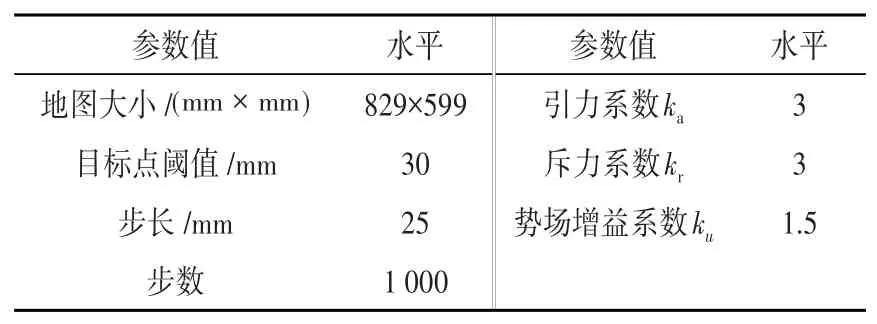
表5 實驗二參數
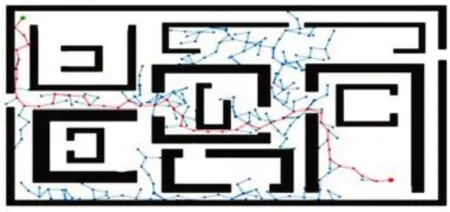
圖8 傳統算法
在對算法進行了200次模擬后,結果如表6所示。普通RRT算法成功率僅為47%,且所用平均節點數約為909個,實驗時間較長。而改進后的算法成功率為63.5%,增加了16.5%,平均節點數減少了大約13.3%,平均時間減少了大約22.1%。
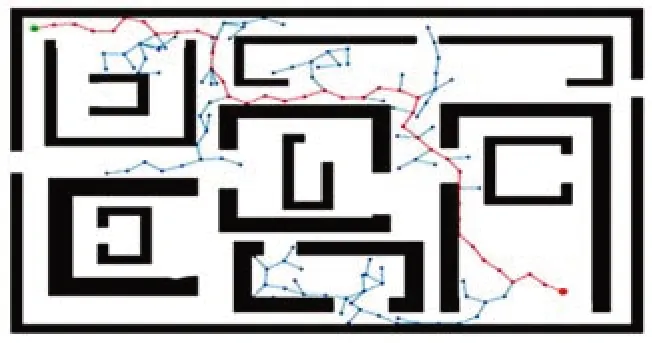
圖9 改進算法
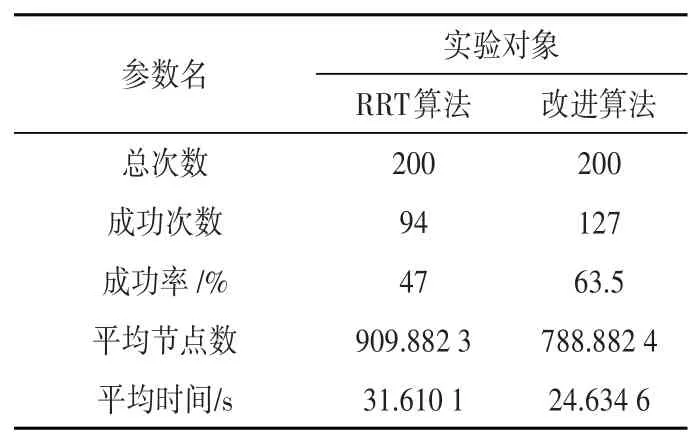
表6 實驗二結果
因為設置地圖環境較為復雜,且設定步數也僅為1 000步,所以兩種算法成功率均較低,但是也可明顯看出改進后的算法對于路徑的規劃表現更佳,從成功率和規劃效率上有了一定的優化,尤其在地圖的狹窄部分,由于選點函數和狹窄概率函數的影響,使得選點判斷更合理,所選擇路徑更優。
4 結束語
設計一種新的選點函數,通過區域化增益的方式,隨機生成新的子節點,通過節點選擇判定后產生,可以有效減少無效點,提高選點效率。
針對特殊狹窄空間,彈性地改變選點判定范圍,更有利于尋找正確路徑,提高整體路徑規劃效率。
本文研究提出的RRT結合人工勢場軌跡規劃的算法,經過模擬實驗測試,相對于傳統的RRT算法,改進后的算法擁有更好的路徑規劃能力,能有效改善路徑規劃中路徑的選擇問題。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
公民與法治(2020年11期)2020-07-25 02:02:06
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
