
Dobot機械臂運動軌跡規(guī)劃與控制
2022-05-12 06:12:00唐雯雯王明芬
機電工程技術(shù) 2022年3期
唐雯雯,盧 宇,王明芬
(福建師范大學協(xié)和學院,福州 350117)
0 引言
隨著工業(yè)自動化的發(fā)展,機械臂在產(chǎn)業(yè)自動化方面已經(jīng)得到了相當廣泛地應(yīng)用。機械臂在復(fù)雜、枯燥甚至是惡劣環(huán)境下,無論是完成效率以及完成精確性都是人類所無法比擬的,也因此,機械臂在人類的生產(chǎn)和生活中發(fā)揮著越來越重要的作用。機械臂可替代人的繁重勞動以實現(xiàn)生產(chǎn)的機械化和自動化,能在有害環(huán)境下操作以保護人身安全,因而廣泛用于機械制造、冶金、電子、輕工和原子能等行業(yè)。針對目前機器人在各個領(lǐng)域的應(yīng)用情況,機器人的運動規(guī)劃控制已經(jīng)成為了一個重要的研究方向,并具有極大的實用經(jīng)濟價值。但機械臂的控制精度、響應(yīng)時間、系統(tǒng)魯棒性、使用壽命、維護周期等問題都亟待解決。目前國內(nèi)外學者對機械臂控制的研究有很多,但對Dobot Magician這種高精度輕量型智能實訓機械臂的研究幾乎沒有,因此本文對于Dobot機械臂的研究開發(fā)具有較高的市場價值。
本文旨在研究Dobot機械臂的軌跡規(guī)劃問題。首先通過建立機械臂模型并進行正運動學方程求解,再采用數(shù)值法確定機械臂在空間中的活動范圍,使機械臂能夠更好地抓取目標物體;然后利用五次多項式插值法對Dobot機械臂進行運動軌跡規(guī)劃。該研究依據(jù)Dobot機械臂高精度且輕量的性能特點,設(shè)計了一步步功能測試實驗,開展了對Dobot機械臂控制方案的研究[1]。
1 Dobot機械臂正運動學分析
1.1 連桿坐標系的建立
Dobot機械臂是一種四自由度串聯(lián)開鏈式機械臂。為了描述機械臂各連桿之間的相對位置和方向關(guān)系,利用Denavit-Hartenberg參數(shù)建模法建立了關(guān)節(jié)坐標系[2]。其分布情況如圖1~2所示。針對Dobot Magician機械臂的連桿機構(gòu),其D-H參數(shù)如表1所示。
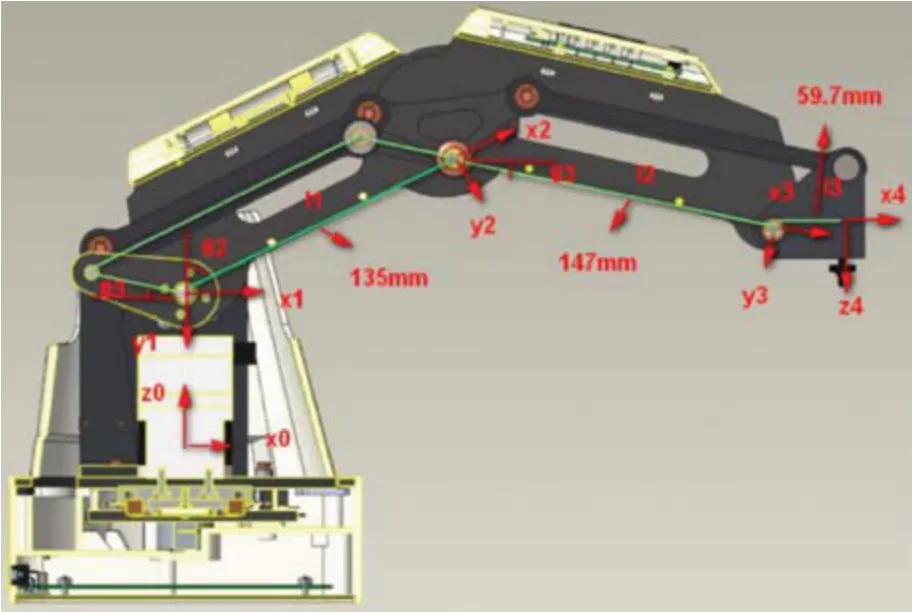
圖1 機械臂D-H建模連桿坐標系

圖2 連桿關(guān)節(jié)
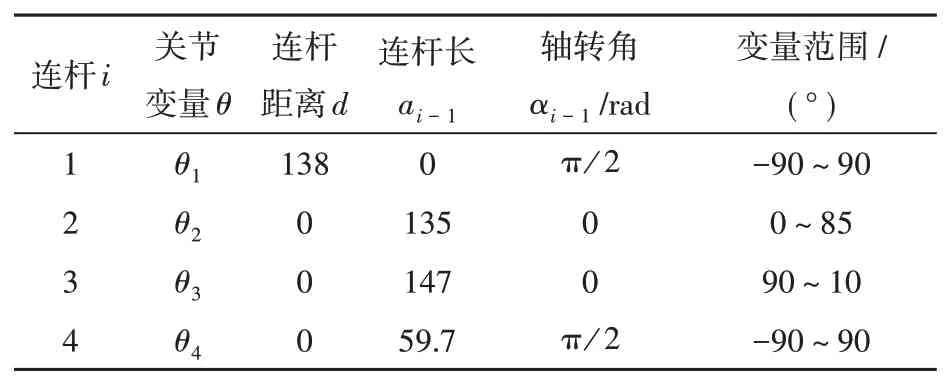
表1 D-H參數(shù)
1.2 Dobot正運動學求解
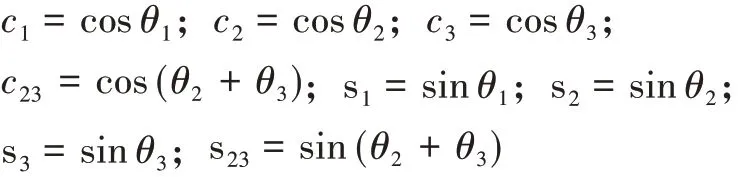
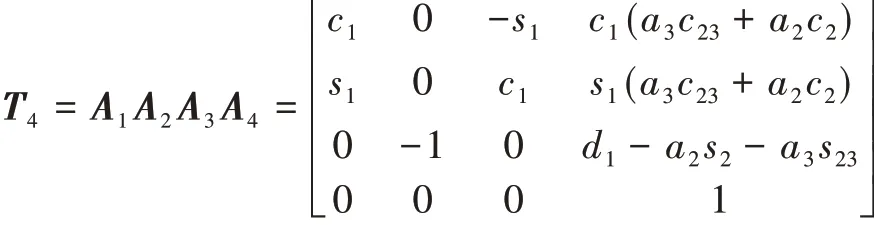
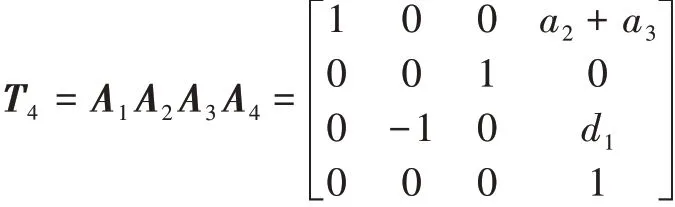
正運動學求解是指以Dobot機械臂各個關(guān)節(jié)變量數(shù)值為已知條件,通過齊次變換方程正向求解其末端在空間中的位姿[3],為了表示方便,令:
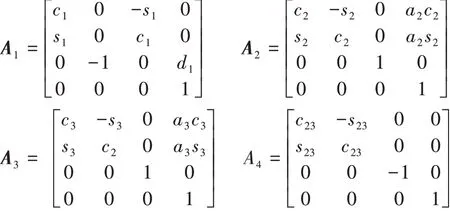
由D-H轉(zhuǎn)換法則,得各坐標系轉(zhuǎn)換矩陣分別為
1.3 Dobot機械臂運動軌跡規(guī)劃
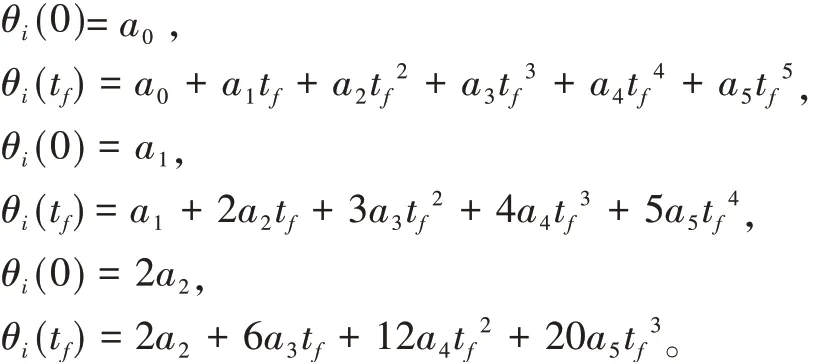
在關(guān)節(jié)空間中,這里使用五次多項式插值法進行Dobot機械臂運動軌跡規(guī)劃的研究。其中需要6個約束條件,包括運動段起點和終點的角度、角速度及角加速度。已知機器人某一關(guān)節(jié)i在初始時刻t0的初始角度為θi(0),終止時刻tf終止角度θi(tf)。假設(shè)這6個約束條件分別為:

設(shè)由這6個約束條件唯一確定的五次多項式的形式為:

其中,系數(shù)a0,a1,...,a5必須滿足以下6個條件,即:
將6個已知的約束條件代入方程,聯(lián)立解得:
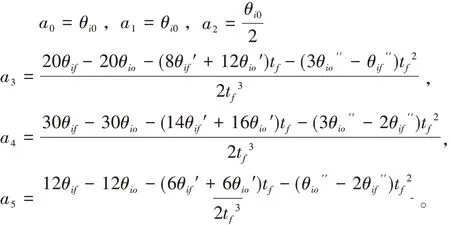
因此,由這6個已知條件,可求得五次多項式的系數(shù),也就是求得了第i關(guān)節(jié)在每一時刻的運動角度、角速度以及角加速度,即得到了第i關(guān)節(jié)的運動軌跡[4]。
2 Matlab仿真
2.1 正運動學結(jié)果驗證
在Matlab環(huán)境下,借助機械臂工具箱Robotics Toolbox建立了四自由度機械臂模型。4個參數(shù)值共同確定了末端執(zhí)行器的位姿。通過驅(qū)動圖對應(yīng)的4個滑塊即改變了機械臂末端執(zhí)行器的位置。Dobot初始姿態(tài)如圖3所示,當機械臂關(guān)節(jié)角q1=0,q2=0,q3=0,q4=0時,機器人末端位置為[343.05 0143.0],單位為cm,X-Y-Z固定角坐標系的回轉(zhuǎn)角、俯仰角和偏轉(zhuǎn)角分別為[0 0 90],單位為°[5]。
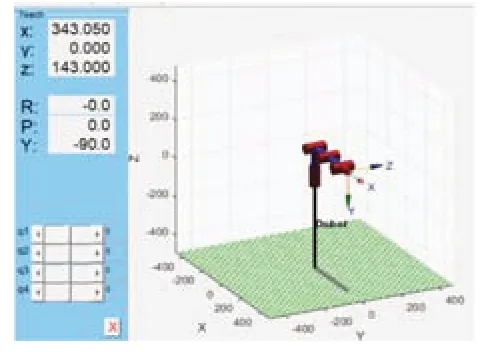
圖3 初始位姿仿真
經(jīng)正運動學求解初始姿態(tài)為:

Dobot末端姿態(tài)如圖4所示,當機械臂關(guān)節(jié)角q1=π∕6,q2=π∕6,q3=π∕6,q4=π∕6時,機器人末端位置為[154.048,111.922,112.856],單位為cm,X-Y-Z固定角坐標系的回轉(zhuǎn)角、俯仰角和偏轉(zhuǎn)角分別為[90-36-90],單位為°。經(jīng)正運動學求解初始姿態(tài)為[6]:
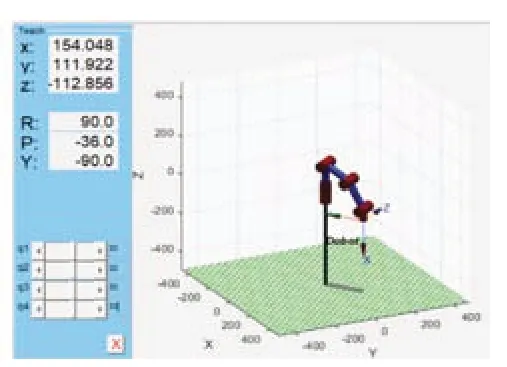
圖4 末端位置仿真
矩陣演算結(jié)果中的姿態(tài)矩陣和位置矩陣均與Matlab中Dobot機械臂仿真模型的結(jié)果一致,從而驗證了正運動學分析的正確性[7]。
2.2 關(guān)節(jié)空間規(guī)劃
假設(shè)各個關(guān)節(jié)運動時間間隔為5 s,各個關(guān)節(jié)初始和終止的角速度都為0,運動時間為40 s;利用五次多項式插值法的jtraj函數(shù)進行軌跡規(guī)劃,分別得到了機械臂從p1到p2各個關(guān)節(jié)的角度、角速度及角加速度與時間的關(guān)系曲線[8]。仿真程序如圖5所示。
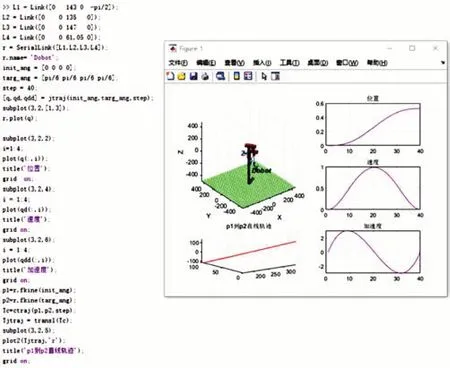
圖5 仿真程序
矩陣q每一行表示在此時間采樣點上各關(guān)節(jié)的關(guān)節(jié)角度;qd和qdd每一行表示相應(yīng)關(guān)節(jié)的角速度與角加速度,初始和終止時刻的角速度及角加速度默認為0。init_ang和targ_ang分別表示機械臂各關(guān)節(jié)初始位置角度和終止位置角度;分別繪制了各個關(guān)節(jié)的角度、角速度及角加速度隨時間變化的曲線。由圖6易知,各關(guān)節(jié)角度值從起點到終點的變化曲線呈現(xiàn)五次多項式曲線變化,驗證了仿真參數(shù)的合理性和有效性。
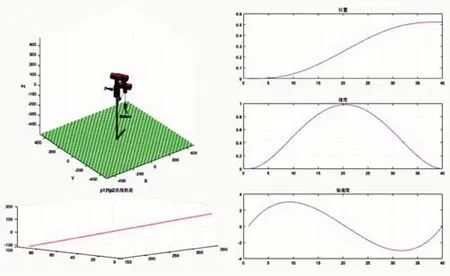
圖6 機械臂末端執(zhí)行器坐標變化曲線
3 Dobot機械臂實驗研究
3.1 實驗研究方案
本研究通過對實體機械臂的控制接口及通信協(xié)議的分析,用python語言實現(xiàn)了Dobot機械臂的二次開發(fā)。由于Dobot機械臂底層代碼并不開源,進行二次開發(fā)、控制算法相關(guān)實驗研究時通過串口通信技術(shù)來接入PC機板控制器利用通信協(xié)議和Dobot控制器進行信息交互,對機械臂的運動控制進行了實驗研究[9]。
3.2 實驗硬件和軟件
此實驗硬件由計算機、Dobot機械臂、控制器、傳感器等組成整個控制算法實驗系統(tǒng)。上位機運行Visual Studio Code軟件,pyQt提供了Dobot各項功能的操作界面(圖7)。上位機與Dobot控制器建立了串口通訊、提供了用戶操作界面。Dobot控制器接收到上位機發(fā)送的控制命令,與機械臂之間建立了位置閉環(huán)控制,從而驅(qū)動Dobot機械臂的運動。

圖7 機械臂控制界面
3.3 點動功能研究
為深刻理解機械臂的軌跡規(guī)劃以及各部分的運動關(guān)系,在利用Matlab仿真運動之后,規(guī)劃了機械臂的末端沿設(shè)定的特定軌跡運動過程。首先輸入指令機械臂移動到指定坐標(x,y,z),并且獲取機械臂姿態(tài)檢測是否移動到(x,y,z),試驗結(jié)果顯示控制算法效果較為理想,機械臂可到達運動范圍內(nèi)任意指定的位置。
圖8 機械臂運動回零位置
圖9 機械臂運動終點位置
3.4 圓弧功能研究
圓弧實驗步驟如下。
(1)準備工作。打開電源,檢查機械臂指示燈,若是綠色則能正常工作。
(2)開啟下位機,開啟上位機控制軟件運行系統(tǒng),并啟動畫畫模式。
(3)執(zhí)行回零功能,如圖10所示。為保證在工作范圍內(nèi)完成繪畫,選擇合適的姿態(tài)落筆到紙上。如圖11所示。
圖10 機械臂回零
圖11 調(diào)整機械臂筆尖位置
(4)設(shè)置畫畫的速度,打開pyCharm軟件,配置加速度選項,根據(jù)快慢調(diào)節(jié),推薦參數(shù)50,輸入筆下壓的距離2 mm。運行繪畫設(shè)計程序,機械臂將沿著給定的期望位置運動,畫畫效果如圖12所示。機械臂最終的繪畫效果圖的關(guān)鍵位置點均與設(shè)想位置基本一致,在圖畫輪廓的轉(zhuǎn)折處變化相對平滑。而繪畫過程中接觸力不好控制,這一點仍需改進[10]。
圖12 繪畫效果
3.5 對弈功能研究
3.5.1 實驗步驟
(1)找到游戲板的頂點。
(2)讓Dobot畫"O"和"X"兩種標記。
(3)創(chuàng)建游戲環(huán)境。
(4)實施搜索算法。
(5)實現(xiàn)狀態(tài)差分。
(6)運動檢測的實現(xiàn)。
(7)處理相機圖片以獲得玩家的動作。
(8)處理當前的狀態(tài),以找到最佳棋步[11]。
3.5.2 軟件設(shè)計原理
首先系統(tǒng)通過圖像處理技術(shù)校準棋盤,然后辨別兩種棋子的形狀,將棋子位置傳給求解函數(shù)并返回棋盤狀態(tài),從而定位棋子位置,提取出當前棋局信息。設(shè)置玩家下棋過程的10 s倒計時,從差異最大的區(qū)域捕捉玩家的下棋動作。程序從當前狀態(tài)需要模擬了每個可能的動作,為了推進游戲的狀態(tài),使用搜索算法實現(xiàn)了游戲中機械臂下棋策略的分析。該算法不斷比較一個啟發(fā)式數(shù),作為游戲的結(jié)果。最終通過PC機發(fā)送相應(yīng)的指令控制機械臂執(zhí)行落子動作[12]。
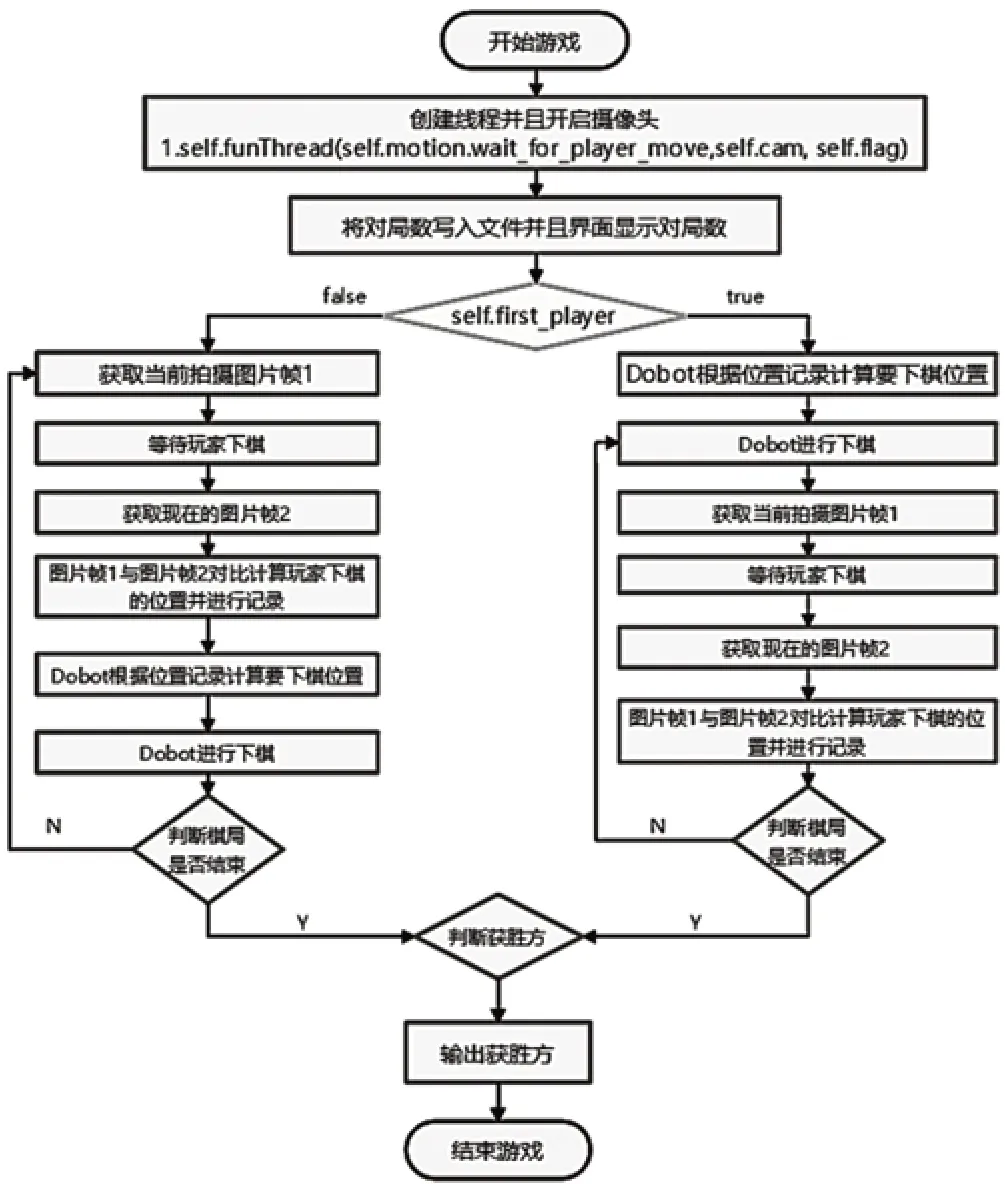
圖13 系統(tǒng)軟件設(shè)計流程
3.5.3 實驗測試
(1)使用帶有筆執(zhí)行器的Dobot Magician在游戲板上畫"X"標記,使用攝像頭檢測并接收棋盤的狀態(tài)。通過在視覺檢測中給出的狀態(tài)、內(nèi)部游戲邏輯和Dobot之間進行交流。
(2)設(shè)置了游戲環(huán)境(棋盤)和游戲棋盤的內(nèi)部表示,與視覺傳感器有關(guān)。然后,將每個單元內(nèi)的每個頂點的一般偏移值定義為在每個游戲單元中創(chuàng)建一個"X"所需的4個坐標。
(3)測試人工智能機器人棋手能否識別出平局狀態(tài)、勝局狀態(tài)和敗局狀態(tài),并且不做進一步的動作。還將使用每局所犯的錯誤,錯誤的定義是Dobot玩家沒有立即獲勝或沒有阻止人類玩家獲勝。

圖14 界面設(shè)計
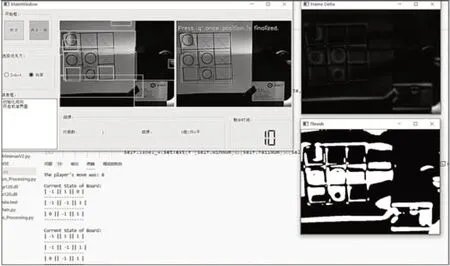
圖15 測試過程
4 結(jié)束語
(1)本文首先求解出了Dobot機械臂的正運動學解析式,然后采用五次多項式插值法實現(xiàn)了Dobot機械臂的軌跡規(guī)劃。并且通過Matlab編程,實驗驗證了正運動學分析結(jié)果的正確性和五次多項式插值算法的有效性。
(2)基于python語言對Dobot機械臂進行了二次開發(fā),設(shè)計了圖形化界面實現(xiàn)了對Dobot機械臂的實時操作控制。
(3)本文最終融合了AI算法,結(jié)合圖像處理技術(shù),設(shè)計了界面化的智能人機對弈系統(tǒng)。實驗結(jié)果為Dobot機械臂軌跡規(guī)劃的研究打下了基礎(chǔ),為該類機械臂在智能應(yīng)用中的實際控制提供了新思路。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
當代工人(2020年8期)2020-05-25 09:07:38
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
初中生學習·低(2016年10期)2016-11-25 04:51:34
飛碟探索(2016年11期)2016-11-14 19:34:47
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
作文大王·笑話大王(2016年8期)2016-08-08 11:28:22
科技知識動漫(2016年8期)2016-07-29 20:40:09
太空探索(2016年5期)2016-07-12 15:17:55
