基于觀測的事件觸發(fā)主從多智能體系統(tǒng)的一致性
2022-05-13 03:18:28夏孟瑤蔣海軍于志永
四川師范大學學報(自然科學版) 2022年3期
夏孟瑤, 蔣海軍, 于志永
(新疆大學 數(shù)學與系統(tǒng)科學學院, 新疆 烏魯木齊 830046)
在過去的幾十年中,多智能體系統(tǒng)的一致性控制因其在編隊控制、機器人團隊等許多領域中的廣泛應用而吸引了越來越多研究者的關注[1-4].達成一致的主要目的是通過智能體之間的信息交流,設計合適的控制器,最終使得所有智能體達到相同狀態(tài).作為控制領域的重要研究對象,多智能體系統(tǒng)的一致性問題可以分為無領導者一致性問題[5-6]和主從(領導跟隨者)一致性問題.現(xiàn)如今,很多學者研究了主從多智能體一致性問題[7-8],其中文獻[3,7]的一個共同特點是使用了每個智能體及其鄰居的連續(xù)狀態(tài)信息.
在研究一致性中,主要的任務是設計僅依賴智能體鄰居信息的控制協(xié)議.事件觸發(fā)作為一種合適的控制方法,其有利于多智能體之間的合作,也可以大大降低能源消耗,來節(jié)省有限的網(wǎng)絡資源.因此,基于事件觸發(fā)控制協(xié)議的優(yōu)點,文獻[9-15]采用事件觸發(fā)控制方法解決了多智能體系統(tǒng)的一致性問題.Chen等[9]提出了基于觀測的事件觸發(fā)控制方法并研究了一般線性多智能體系統(tǒng)的主從一致性問題.Deng等[14]通過引入事件觸發(fā)估計器,提出了2種分布式事件觸發(fā)控制器用于解決無領導和領導跟隨者線性多智能體的一致性問題,其中在事件觸發(fā)機制中設計了自適應觸發(fā)參數(shù),以提高事件觸發(fā)估計器的自我調(diào)節(jié)能力.這些研究結果驗證了事件觸發(fā)控制方法在不同多智能體系統(tǒng)中的有效性.
本文研究了一般線性主從多智能體系統(tǒng)的事件觸發(fā)輸出一致性問題.與現(xiàn)有的工作相比,本文的貢獻主要包括以下2點:1) 基于事件觸發(fā)控制方法,提出了一種輸出反饋事件觸發(fā)控制協(xié)議和分布式自適應事件觸發(fā)控制協(xié)議;2) 對于具有線性動力學和一般無向網(wǎng)絡拓撲的主從多智能體系統(tǒng),提出了一種基于觀測的自適應事件觸發(fā)控制器,用以解決主從多智能體系統(tǒng)的一致性問題.
1 預備知識和模型描述
為了方便,先給出一些記號.‖·‖代表歐氏范數(shù),?代表矩陣的Kronecker乘積,Rn代表n維實列向量,In是n維單位矩陣,1代表分量全為1的向量.對于矩陣P,PT、λ(P)和λ(P)分別代表P的轉(zhuǎn)置、最小特征值和最大特征值,P>0代表P是一個正定矩陣,diag(·)代表對角矩陣.
考慮由N個智能體所組成的網(wǎng)絡,網(wǎng)絡拓撲由圖G=(V,E)表示,其中V={1,2,…,N}表示節(jié)點集,E={(i,j)|i,j∈V}表示邊集,記智能體i的鄰居節(jié)點集為Ni={j|(i,j)∈E}.A=[aij]∈RN×N是圖G的鄰接矩陣,若(i,j)∈E,則aij>0,否則,aij=0.對于無向圖G來說,aij=aji.記節(jié)點的度矩陣為D=diag(d1,d2,…,dN),其中d則圖G的拉普拉斯矩陣定義為L=D-A.令矩陣H=L+B,其中B=diag(b1,b2,…,bN),如果智能體i能夠接收到領導者的信息,則bi=1,否則,bi=0.
第i個智能體的動力學描述為
(1)
其中
xi(t)=(xi1(t),xi2(t),…,xin(t))∈Rn,
ui(t)∈Rm,yi(t)∈Rq
分別表示第i個智能體的狀態(tài)、控制輸入和輸出.A∈Rn×n、B∈Rn×m、C∈Rq×n表示具有合適維數(shù)的常數(shù)矩陣.
領導者的動力學行為描述為
(2)


下面將給出一些相關的定義和假設.
假設 1.1拓撲圖G是連通的,并且至少有一個跟隨者可以接收到領導者的信息.
假設 1.2(A,B)是穩(wěn)定的,(A,C)是可測的.
引理 1.1[16]L是具有N個點的無向連通圖G的拉普拉斯矩陣,則L的特征值大小滿足
0=λ1<λ2≤λ3≤…≤λN.

定義 1.1對于多智能體系統(tǒng)(1)和(2)的任意初值,如果滿足
其中
x0(t)=(x01(t),x02(t),…,x0n(t))∈Rn,
i=1,2,…,N,
則稱多智能體系統(tǒng)(1)和(2)達到一致.
2 主要結論
2.1 基于觀測的事件觸發(fā)穩(wěn)定性首先,通過設計合適的增益矩陣K和輸出事件觸發(fā)條件,使系統(tǒng)達到漸近穩(wěn)定.定義如下線性矩陣不等式
A
(5)
其中P1>0是對稱正定矩陣.
定義
為輸出測量誤差,則第i個智能體的觸發(fā)條件為
tik+1=inf{t>tik,fi(t)≥0},
(6)
其中
fi(t)=
‖e
其向量形式為
(L?K)ey(t),
(7)
其中
證明考慮如下Lyapunov函數(shù)
其中P1>0是正定矩陣.
將V1(t)沿著上式求導數(shù)
通過應用Young不等式,可得
進一步得到
由觸發(fā)條件(6)可得
‖e
因此,有
令ε=λ(L),以及存在一個正交矩陣U,使得
ULU=diag(0,λ2,λ3,…,λN).
令
有
(I
根據(jù)線性矩陣不等式(5),可以得到

D+‖e
‖A‖‖eyi‖+‖Ayi(tik)‖+
(8)
其中


‖e
(9)
由事件觸發(fā)函數(shù)可得
(10)

成立.
情形 2如果‖A‖=0,則根據(jù)(8)式,可得
同理,有如下不等式
2.2 自適應事件觸發(fā)穩(wěn)定性定義

sik+1=inf{t>sik,gi(t)≥0},
(11)
其中
g
ηi(si
b
P2>0滿足
P2A+AP2-2P2BBP2+Q=0,
其中Q>0是任意矩陣.
(12)
分布式自適應事件觸發(fā)控制器設計如下
u
(13)

令σi(t)=xi(t)-x0(t)表示跟蹤誤差,根據(jù)系統(tǒng)(1)和(2)可得
(15)
其中
根據(jù)η(t)的定義,有
η(t)=(H?I
(H?In)σ(t)+(H?I
定理 2.2對于主從多智能體系統(tǒng)(1)和(2),考慮具有自適應的觸發(fā)機制(11)和自適應控制器(13).如果假設1.1和1.2成立,則誤差系統(tǒng)(15)漸近收斂到如下有界區(qū)域
其中
此外,記
βi=1/2((d
證明考慮如下的Lyapunov函數(shù)
V2(t)=V3(t)+V4(t),
(16)
其中
V3(t)=σ(t)(H?P2)σ(t),
ξ
對V2(t)求導得
(17)
令K1=BP2,Γ=P2BBP2,根據(jù)
的定義,有
σ(t)(H?(AP2+P2A)-αH2?Γ)σ(t)-
σ(t)(H?(AP2+P2A)-αH2?Γ)σ(t)-
根據(jù)Young不等式可得
(18)
然后,可以得到
Γηi(si
(19)
根據(jù)Young不等式有
(20)
結合(17)~(20)式可得
(21)
根據(jù)觸發(fā)函數(shù),可得
δe-ρ(t-sik),
(22)

(di+1)δe
(23)


(24)
根據(jù)圖理論可得

結合(21)和(24)~(25)式可得

σ(t)(H?(AP2+P2A)-αH2?Γ)σ(t)-


(26)
結合上述的分析過程,則有
αH2?Γ)σ(t)+φ≤
σ(t)(H?(AP2+P2A-2Γ))σ(t)+φ≤
-τλ(H)λ(Q)‖σ(t)‖2-
(1-τ)λ(H)λ(Q)‖σ(t)‖2+φ.(27)
對任意的τ>0,令
(1-τ)λ(H)λ(Q)‖σ(t)‖2>φ,
可得
最終可以得到
證畢.
觸發(fā)函數(shù)(11)不會發(fā)生Zeno現(xiàn)象,其證明過程與定理1中排除Zeno現(xiàn)象的證明相同,此處省略證明過程.
注 2.1與文獻[13]相比,本文提出了一種自適應事件觸發(fā)控制器,通過設計合適的自適應參數(shù),減少了智能體之間的信息交換并節(jié)省資源.最終,通過引理1.2,解決了主從多智能體系統(tǒng)一致性問題.
3 數(shù)值仿真
為了說明控制協(xié)議的有效性,給出如下的數(shù)值算例.
考慮具有5個智能體的多智能體系統(tǒng)(1),智能體之間的通訊拓撲用圖1來描述,并選取如下矩陣

圖 1 通訊拓撲圖G

取系統(tǒng)的初值為:
x0(0)=(1.5,-1.5),x1(0)=(1,-0.5),
x2(0)=(0.5,0.5),x3(0)=(0.6,1),
x4(0)=(0,0.5).
自適應觸發(fā)參數(shù)的初值為:
事件觸發(fā)估計器參數(shù)為:

圖 2 估計誤差的狀態(tài)軌跡

圖 3 估計誤差的狀態(tài)軌跡

圖 4 觸發(fā)時刻
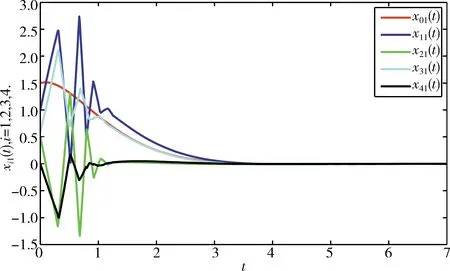
圖 5 xi1的狀態(tài)軌跡

圖6 xi2的狀態(tài)軌跡

圖7 智能體的觸發(fā)時刻
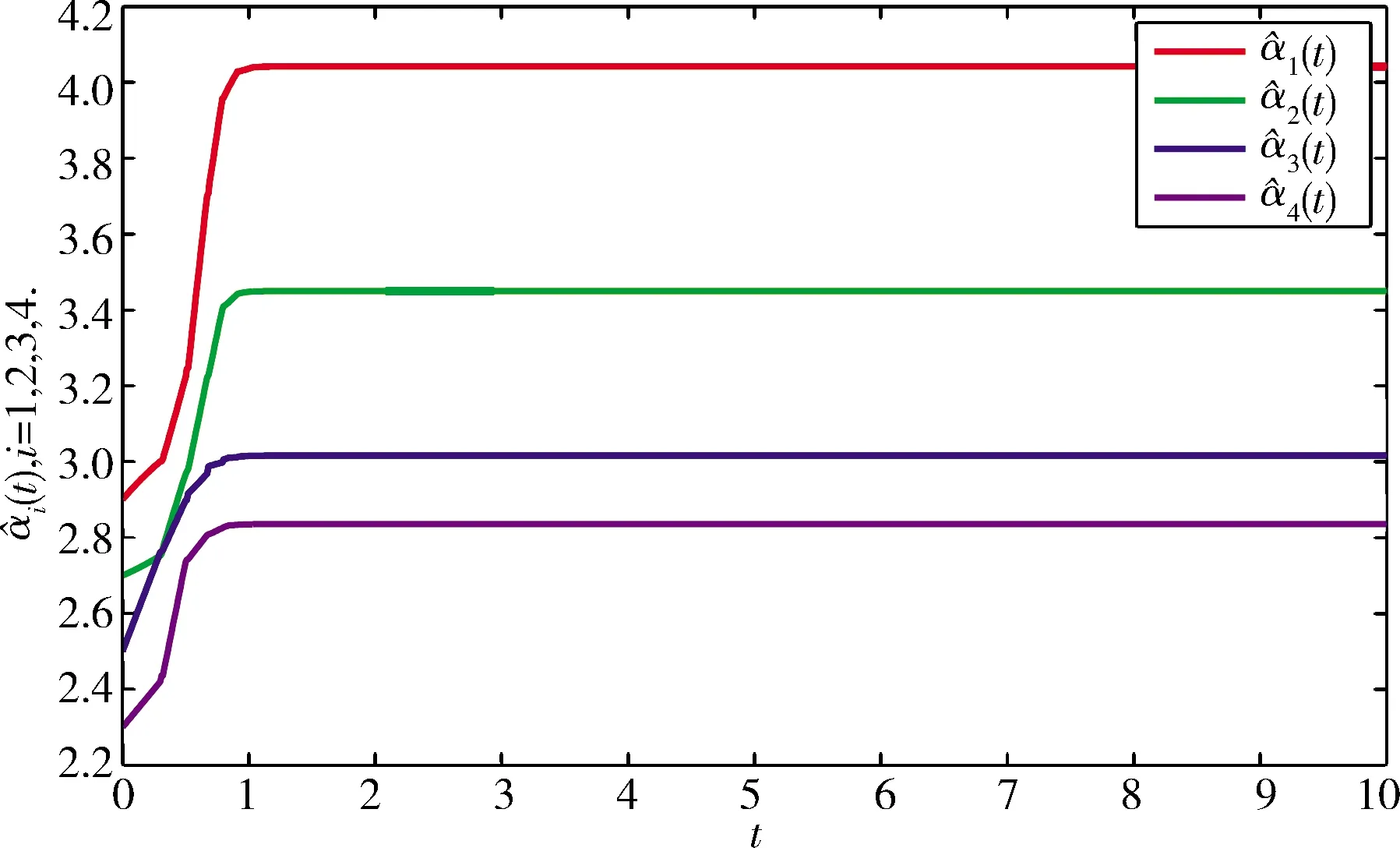
圖 8 自適應觸發(fā)參數(shù)

圖9 自適應觸發(fā)參數(shù)
4 結論
本文基于觀測自適應事件觸發(fā)控制方法,研究了具有一般線性動力學的主從多智能體系統(tǒng)的一致性問題,并利用Lyapunov穩(wěn)定性理論和線性矩陣不等式技巧得到了主從多智能體系統(tǒng)達到一致的相關條件.
致謝天山創(chuàng)新團隊項目(2020D14017)和天池博士項目(TCBS201803)對本文給予了資助,謹致謝意.
猜你喜歡
公民與法治(2022年5期)2022-07-29 00:47:28
教學考試(高考物理)(2021年5期)2021-11-08 10:31:22
中醫(yī)眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
山東青年(2016年1期)2016-02-28 14:25:25
燕山大學學報(2015年4期)2015-12-25 02:19:49
當代修辭學(2014年3期)2014-01-21 02:30:44