雙臂SCARA機器人運動學分析與仿真*
2022-05-20 08:07:04郝建豹蔡文賢
機械研究與應用 2022年2期
郝建豹,蔡文賢
(廣東交通職業技術學院 工業機器人系,廣東 廣州 510800)
0 引 言
裝備制造企業工藝板、電路板等快速插件領域應用通用機器人(如常見串聯6自由度機器人,平面SCARA 4自由度機器人)無法發揮其高度柔性化的優勢,且存在靈活度低、工作效率低、性價比低等問題[1-5]。而雙臂機器人是一個控制系統控制兩個獨立臂部的機器人,雙臂可以協同作業,或單臂獨立作業,或同時做兩種不同工作,在生產效率等方面比通用機器人都有很大的提高。
常見串聯6自由度機器人的相關研究理論并不是全部都適用于雙臂機器人研究,雙臂機器人研究是研究領域中較為關鍵的新研究課題,具有較高的社會價值[6-7]。ABB機器人公司設計的7自由度雙臂YUMI機器人幾乎具備了人類手臂的全部操作功能,但是其價格昂貴,應用到某些插件領域性價比較低。
機器人運動學分析是實現機器人運動控制的基礎[8],而 D-H法[9-12]是常用的分析方法。筆者針對快速插件領域設計了雙臂SCARA機器人,該機器人一共5個自由度,單臂2個自由度,機器人移動軌道1個自由度。筆者設計并制作了虛擬樣機,利用D-H法建立了運動學模型,并對機器人工具坐標、工件坐標及世界坐標進行了標定,針對雙臂協同工作情況利用SimMechines進行了運動仿真。
1 機構簡述及模型建立
雙臂SCARA機器人的本體機械結構主要包括直線運動模塊,基座、手臂(大臂與小臂)、末端執行器等部分,具體如圖1所示。
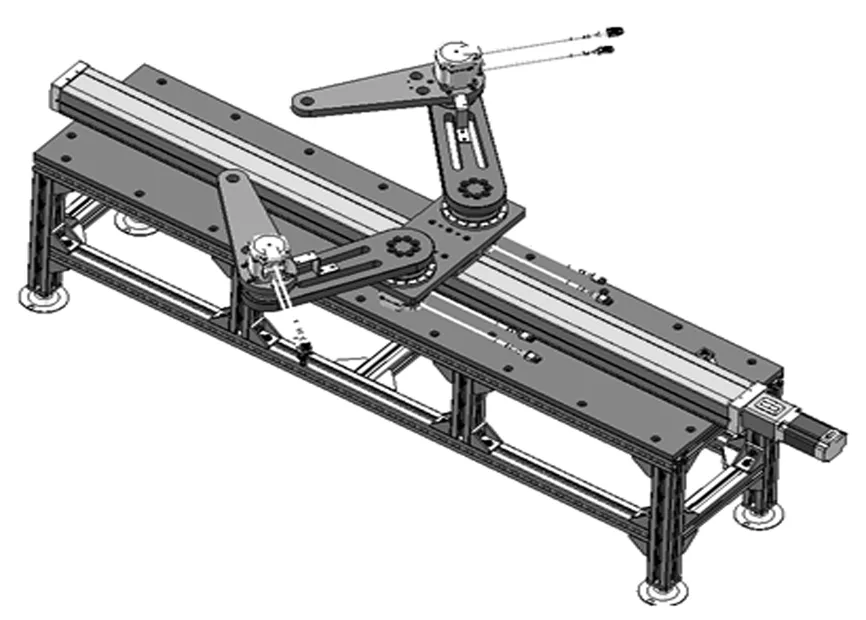
圖1 雙臂SCARA機器人虛擬樣機
機器人直線運動模塊完成機器人的直線運動,可擴大機器人運動范圍。大臂與小臂兩個旋轉運動,兩個旋轉關節的軸線相互平行,可控制末端執行器的姿態及其在平面方向上的運動定位。末端執行器采用氣動方式,可執行垂直插件運動。
1.1 機器人正運動學方程
由于雙臂 SCARA 機器人單臂具有2個自由度,而機器人移動軌道1個自由度為伺服電機獨立控制,對雙臂機器人研究沒有影響,另外機器人手部垂直運動自由度可忽略,故可將其簡化為俯視圖如圖2所示的結構。
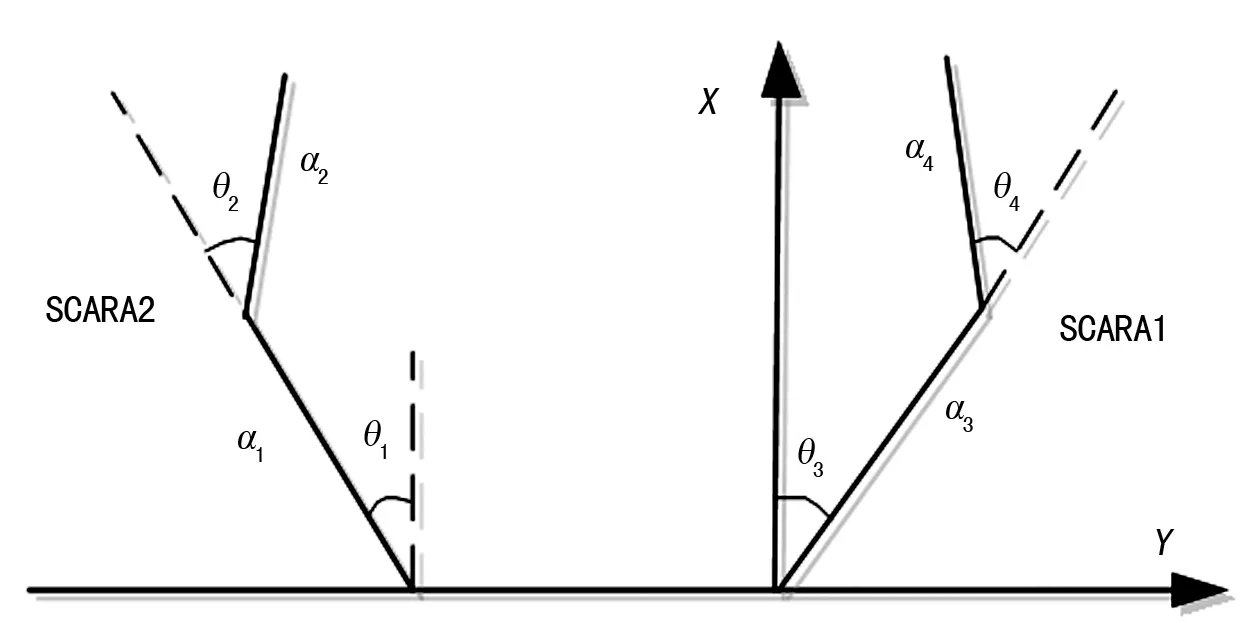
圖2 雙臂SCARA機器人坐標系
圖2中雙臂 SCARA機器人坐標系為世界坐標系,符合右手定則,Z軸垂直紙面向下。SCARA1為右臂,SCARA2為左臂。α1是左大臂長度,α2是左小臂長度,α3是右大臂長度,α4是右小臂長度。其他說明及取值見表1。

表1 雙臂SCARA機器人D-H坐標參數
因雙臂機器人左右臂對稱,對雙臂機器人單手系D-H坐標轉換公式:
An+1=Rot(z,θn+1)×Tran(0,0,dn+1)×
Tran(an+1,0,0)×Rot(x,an+1)
(1)
式中:cn+1表示cosθn+1,sn+1表示sinθn+1,cαn+1表示cosαn+1等,下同。
根據公式(1)可得出:
雙臂SCARA機器人的軸1與軸2之間的變換規則為:
RTH=RT11T22T3…n-1Tn=A1A2A3…An
(2)
根據式(2),得出機器人正運動學模型:

(3)
式中:c12表示cos(θ1+θ2);s12表示sin(θ1+θ2)。
1.2 機器人逆運動學方程
由于雙臂機器人有兩個擺臂,到達空間一點有兩組合適解,一個屬于右手系,一個屬于左手系,因此逆運動學求解時需要根據左右手系給出唯一解,可根據關節當前角度所構成左右手系統進行判斷。為求解逆運動學,對于雙臂機器人中的某一臂,采用幾何方法,具體如圖3所示。
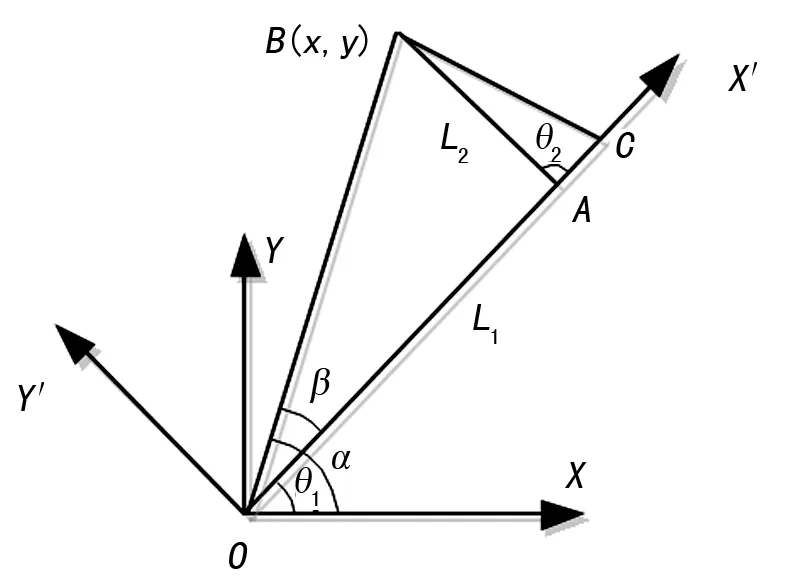
圖3 逆運動幾何圖形
在ΔOAB中,由余弦定理得:

結合右臂臂長數值α3與α4,下面根據象限可解出右臂θ3,θ4的值。
(1)如果px>0,左手系情況下:
右手系情況下:
(2)如果px<0,py<0,左手系情況下:
右手系情況下:
(3)如果px<0,py>0,左手系情況下:
右手系情況下:
2 雙臂SCARA機器人關鍵數據標定
2.1 工具坐標系標定
由于機器人末端執行器實際加工尺寸與理論設計尺寸存在偏差,另外末端執行器在安裝過程中存在偏差,因此需要對安裝后的末端操作器實際尺寸進行反向測量,進而需要對工具坐標系標定。


兩式相減:
從而得出:
2.2 世界坐標系標定
(6)
3 雙臂協同運動仿真
為驗證文中所建立的正、逆運動學模型的準確性,基于Matlab工具 SimMechines 虛擬樣機運動學算法仿真驗證。利用SolidWorks軟件對雙臂機器人進行建模后,轉換為STL(stereo lithography)文件類型并導入 Matlab 軟件中,編寫程序函數 T=SCARA_fkine(theta),T=SCARA_ikine(Tcp,DH)等,在SimMechines中裝配并添加關節約束,并給定雙臂SCARA機器人的起始點。仿真給定雙臂SCARA機器人起點和終點的相關數據如表2所列。仿真結果如圖4所示。
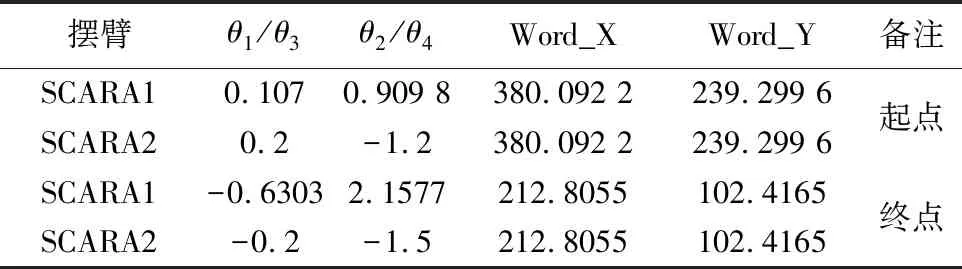
表2 雙臂SCARA機器人運動學仿真數據驗證
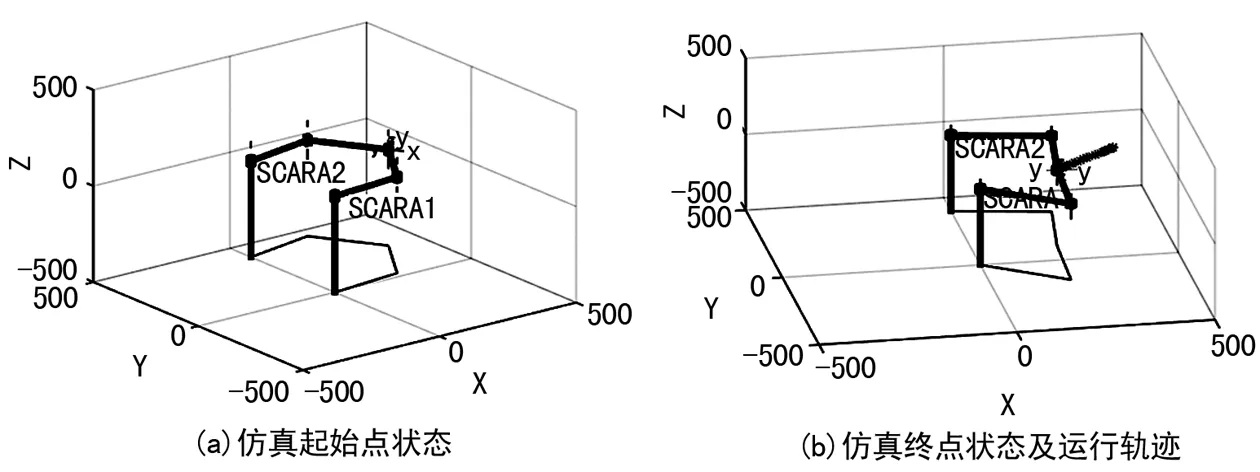
圖4 機器人左右手臂協同運行軌跡
雙臂協同直線軌跡仿真說明,所建立的正逆運動學模型正確的,并且能夠完成協同運動。
4 結 語
設計了一種5自由度的雙臂SCARA機器人虛擬樣機,應用D-H坐標系建立了正逆運動學模型。針對雙臂機器人給出了工具坐標系、工件坐標系、世界坐標系標定方法。采用基于Matlab工具 SimMechines 虛擬樣機進行了雙臂協同運動仿真,仿真結果驗證了構建模型的正確性,為進一步研究雙臂機器人的開發與工程應用提供了參考。