適用于SPECT運動控制系統的EtherCAT-IO模塊開發與研究
2022-05-20 08:15:06孟富國MENGFuguo
價值工程 2022年18期
關鍵詞:功能
孟富國 MENG Fu-guo
(濱松光子科技(廊坊)有限公司,廊坊 065000)
0 引言
單光子發射計算機斷層裝置簡稱為SPECT。SPECT是目前臨床上應用最廣泛的核醫學儀器,廣泛應用于臨床診斷和醫學研究,其可以進行功能成像,反應器官動態特征,對疾病特別是腫瘤的早期診斷有重要意義。其成像原理是利用γ探測器采集事先引入人體的放射性核素進行跟蹤、探測、掃描并由計算機分析重建,生成放射性分布的平面、斷層及三維影像圖。
隨著SPECT快速發展,高分辨率和高效率探測是主要研究方向,目前發展形成了多探頭、多角度、短采集距離(增加輪廓掃描傳感器實現貼近人體掃描)等幾個技術方向。這幾個方向都離不開安全、高精準的運動控制系統,市場上常見的雙探頭SPECT及SPECT-CT核醫學設備,常配備有十幾個運動軸和近百個傳感器,多軸聯動及實時掃描過程的傳感器能否實時反饋與控制對于運動控制系統的安全運行尤為重要。自主EtherCAT-IO模塊實現了擴展模塊(電機驅動器與傳感器)的同步實時反饋與控制,提升了運控系統的穩定性與安全性。擴展模塊的同步實時反饋,使得探測器連續貼近人體輪廓掃描探測成為可能,同時提升運動控制系統安全性。
1 SPECT運動系統簡介
1.1 SPECT運動控制系統
SPECT運動控制系統,主要用于調整γ探測器姿態,使γ探測器對準被檢測的器官。配備人體輪廓掃描傳感器的可變角SPECT,運動軸運動中還需要根據實時反饋的人體輪廓位置,保持探頭與人體在最近的距離,因此用于SPECT運動控制系統中專用的擴展模塊(IO模塊)尤為重要。
SPECT的運動控制系統由運動控制器、驅動器、電機、EtherCAT-IO模塊、傳感器及其他控制部件組成。其中EtherCAT-IO模塊承擔第三方(不支持EtherCAT通訊)伺服電機驅動器、步進電機驅動器、擴展的傳感器等模塊的控制與反饋通訊工作。
1.2 EtherCAT原理及組成
EtherCAT是一個現場總線系統。EtherCAT以太網技術在數據鏈路層采用了實時調度的軟件核,并提供了過程數據傳輸的獨立通道,提高了系統的實時性,非常適用于SPECT運動領域。
EtherCAT網絡系統由主站與從站構成,目前SPECT設備上,EtherCAT網絡系統由一個主站和多個從站組成(電機驅動器從站、IO從站)。EtherCAT網絡具有廣泛適用性、以太網的標準、高效率、高同步性等主要特點,充分利用了以太網的全雙工特性。使用主從模式介質訪問控制(MAC),主站發送以太網幀給各個從站,從站從數據幀中抽取數據或將數據插入數據幀。
在SPECT運動控制系統中,應用程序之間通常有兩種數據交換形式,時間關鍵和非時間關鍵。非時間關鍵數據可以非周期性發送,命名為COE。時間關鍵表示特定的動作必須在確定時間內完成,通常周期性發送,稱為周期性過程數據通訊,命名為PDO。EtherCAT主站與從站構成總線式PDO實時通訊網絡,整個處理過程由主站和從站中的硬件實現。實時通訊中主、從站可分為自由運行模式和同步運行模式。自由模式下,主站與從站使用本地時鐘構成實時通訊循環周期,與EtherCAT實時通訊部分構成異步通訊。同步模式下,實時通訊部分發出分布式同步時鐘,主從站部分按照分布式同步時鐘觸發通訊,與EtherCAT實時通訊部分構成同步運行模式,進一步提高系統同步性。
2 EtherCAT-IO模塊的設計
2.1 模塊簡述
基于EtheCAT的IO模塊為EtherCAT從站,是一款基于EtherCAT網絡總線的數字IO模塊,它支持32路輸入與32路輸出。其外觀見圖1。
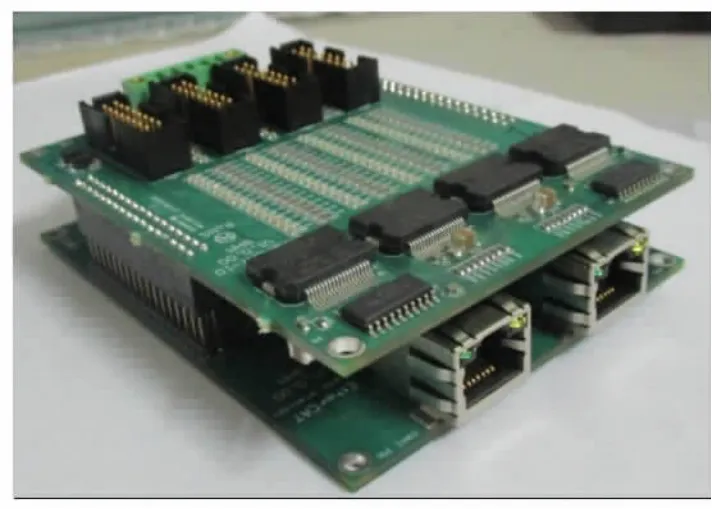
圖1 EtheCAT的IO模塊
2.2 模塊組成
基于EtherCAT的IO模塊開發分為兩部:設備描述文件xml文件;IO模塊硬件與程序;
①設備描述文件xml文件,用于主站識別從站并與從站建立通訊連接,描述內容包含從站廠商、模塊類型、通訊數據詳細信息、ESC配置信息等。
②IO模塊硬件與程序,實現基于EtherCAT的COE、PDO通訊和終端IO控制兩部分功能。硬件上主要由1)EtherCAT通訊部分、2)微處理單元、3)隔離驅動、4)電源系統構成。固件程序主要由MCU微處理單元中的ARM固件程序構成,整體構成見圖2。
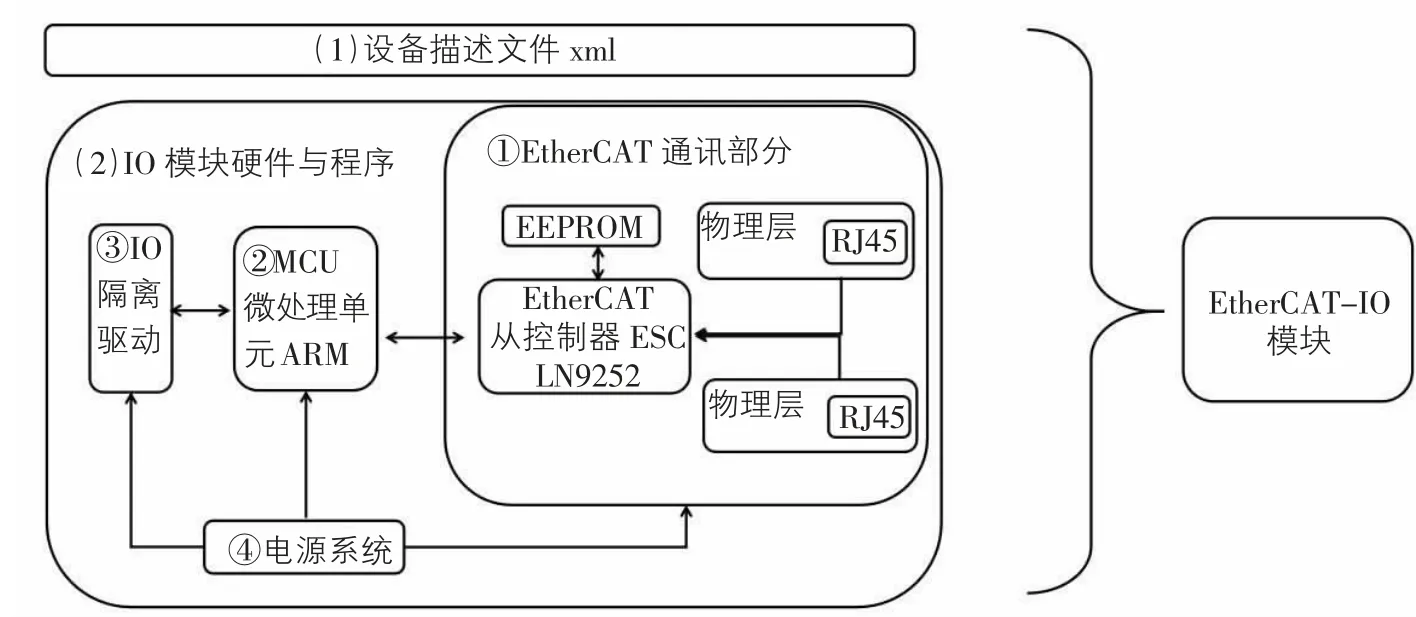
圖2 基于EtherCAT的IO模塊組成
3 模塊設計
xml文件為IO從站設備描述文件,負責給EtherCAT主站提供從站詳細描述信息,協助主站識別從站并與從站建立通訊連接,保證主站與從站通訊數據定義一致。xml文件描述了從站廠商、類型、版本、FMMU描述信息、通訊映射地址、通訊變量、通訊類型、ESC的EEPROM配置信息等。其中通訊數據定義按照CANopen協議中的行規CiA401定義。
①EtherCAT通訊部分由物理層器件、EtherCAT從站控制器ESC(EtherCAT Slave controller)組成。物理層器件負責實現EtherCAT的網絡硬件連接,EtherCAT從站通訊控制器芯片ESC負責處理EtherCAT數據幀。
ESC使用雙端口存儲區實現EtherCAT主站與從站本地應用的數據交換,各個從站ESC按照各自在環路上的物理位置順序移位讀寫數據幀。EtherCAT的報文經過從站時,ESC從報文中提取發送給自己的輸出命令數據并將其存儲到內部存儲區,輸入數據從內部存儲區又被寫到相對應的子報文中。數據的提取與插入是由數據鏈路層的硬件實現。控制器ESC選用了LAN芯片,該芯片物理層符合IEEE 802.3/802.3u標準,集成2個以太網PHY端口通訊,速度可達100Mbps,并同時支持HP Auto-MDIX功能、LAN喚醒、MII接口、EBUS接口。
②微處理單元由MCU和固件程序構成,主要負責處理EtherCAT通訊和外部傳感器采集與控制任務。
微處理單元從ESC讀取EtherCAT實時控制數據,數據通過解析,輸出到IO端口,實現IO的控制功能;采樣IO狀態數據,數據解析合并,寫入ESC中,通過EtherCAT實時通訊傳送主站,實現IO狀態采集反饋。
主要涉及MCU選型、電路設計、PCB設計、固件程序開發。
MCU選型結合IO模塊需求及擴展電機驅動模塊需求,IO模塊對GPIO數量需求較大,需大于85個,電機驅動對芯片性能要求較高。綜合考慮性價比,選用了擁有內部硬件除法器、單周期乘法器的高性能CortexTM-M4系列的ARM實現,工作頻率72MHz,集成5種通訊接口SPI/I2C/CAN/USB/USART、2個12位ADC、支持外置看門狗、內部集成校準RTC、內部C循環冗余校驗計算單元格,還有睡眠、停機和待機模式等。
固件程序設計開發,涉及存儲同步管理通道、對象字典設計、PDO映射和分配、PDO數據解析、數據處理映射到PDO、獲取IO狀態、輸出IO狀態、DC開啟及處理等部分開發。整體由12部分組成:1.初始化參數設置;2.存儲同步管理通道配置;3.創建并初始化從站對象字典;4.設置從站回調功能;5.開始從站對象字典;6.PDO映射和分配;7.設置時間屏蔽寄存器;8.獲取IO狀態;9.數據處理映射到上傳PDO;10.下載PDO數據解析;11.采集輸出IO狀態;12.DC開啟及處理。
③IO隔離驅動模塊主要有隔離、驅動、采樣、保護電路四部分組成,配合GPIO實現終端設備的控制與檢測。
IO隔離驅動模塊主要包含與微處理器的IO隔離功能、IO輸出功率放大功能、IO輸入信號檢測功能、IO輸出過流、過熱保護、短路、IO狀態LED顯示功能、抗反向電壓沖擊、兼容感性負載(繼電器、蜂鳴器等)、寬電平范圍IO輸入口(7V~24V為高電平,0~5V為低電平)等功能。
微處理器GPIO口輸出的電平先經過CMOS型三態緩沖門電路,提升功率驅動光耦合隔離,實現輸出GPIO隔離,光耦合輸出接入功率芯片,實現24V/600mA的驅動能力,用于控制終端設備;終端設備反饋信號經過限流及分壓驅動光耦,輸入到CMOS型三態緩沖門,接入微處理器GPIO輸入口,實現終端設備的監測。此部分為硬件開發中的重點,IO隔離驅動部分整體框圖見圖3。
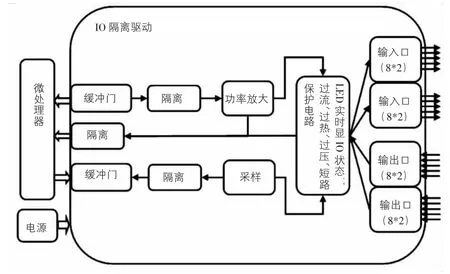
圖3 IO隔離驅動部分整體框圖
電源系統負責各個單元供電以及IO輸出設備供電,保證能源供給,并防止各個單元串擾。
電源輸入24V,輸出24V、5V、3.3V、1.2V等幾種電源,采用了DC-DC隔離電源方案,將整個模塊分成了兩個電源系統,分別為微處理部分、功率驅動部分。在PCB設計中將微處理與驅動部分設計為兩塊獨立的PCB,電氣間隔1cm以上,見圖4 EtherCAT-IO電路板圖。
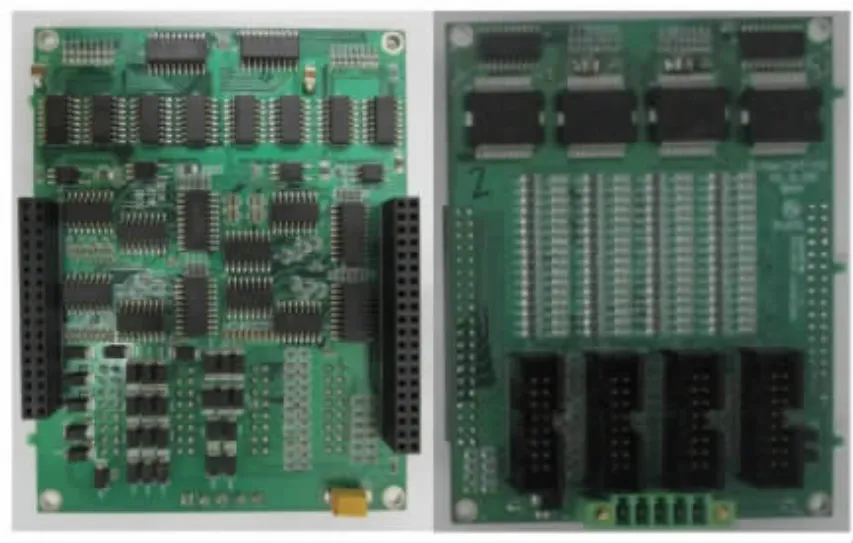
圖4 EtherCAT-IO電路板圖
4 EtherCAT-IO模塊的測試與應用
4.1 功能與性能測試
功能與性能測試分為四部分測試,分別為硬件功能配置、輸出IO功能性能、輸入IO功能性能、EtherCAT通訊功能性能測試,詳細見表1。

表1 功能與性能測試
測試結果:EtherCAT-IO模塊硬件功能配置、輸出IO功能性能、輸入IO功能性能、EtherCAT通訊功能性能均符合要求。
4.2 應用測試結果
EtherCAT-IO模塊應用在可變角SPECT上,應用EtherCAT-IO模塊的可變角SPECT目前已完成三類醫療儀器注冊。EtherCAT-IO模塊承擔四項工作,分別為整機床的兩個伺服電機驅動器控制通訊、兩個步進電機控制通訊、自主身體輪廓掃描傳感器的實時監測控制、擴展的47個通用傳感器的實時監測控制。應用評價基于此四個應用項目開展,進行了累計10萬次應用測試監測,詳細測試結果見表2。
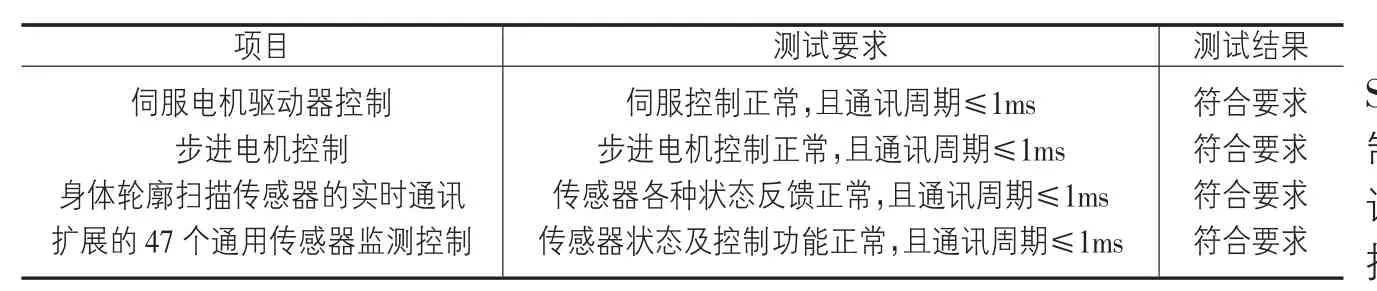
表2 應用測試
驗證結果:EtherCAT-IO模塊,在10萬次應用測試中,運行正常,故障率為零,符合要求。
5 結論
本文介紹的EtherCAT-IO模塊在SPECT運動控制系統中的應用,提升運動控制系統的安全性及穩定性,周期性的實時通訊功能確保了擴展的模塊狀態實時反饋與控制,尤其與可變角SPECT身體輪廓掃描傳感器配合使用,極大的提升輪廓掃描傳感器狀態反饋到運動控制中心的時效性,同時不影響其它運動軸的實時控制與通訊。
實驗證明,EtherCAT-IO模塊工作穩定,可以在SPECT運動控制系統中廣泛應用。
猜你喜歡
鐘表(2023年5期)2023-10-27 04:20:44
中華詩詞(2022年6期)2022-12-31 06:41:24
當代陜西(2021年21期)2022-01-19 02:00:26
中學生數理化(高中版.高考數學)(2020年1期)2020-02-20 13:23:44
經濟技術協作信息(2018年11期)2019-01-14 03:07:20
中國科技論壇(2017年7期)2017-07-25 08:49:53
制造技術與機床(2017年3期)2017-06-23 08:11:33
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55