水平井牽引器驅(qū)動(dòng)系統(tǒng)慣量辨識(shí)算法
2022-05-21 08:46:22劉鎮(zhèn)江王桂宇楊留強(qiáng)
關(guān)鍵詞:系統(tǒng)
劉鎮(zhèn)江,王桂宇,楊留強(qiáng)
中國(guó)石油集團(tuán)測(cè)井有限公司遼河分公司,遼寧 盤錦 124010
隨著水平井牽引器的廣泛使用,使用者對(duì)牽引器的性能要求越來越高,從原來的僅僅只需要牽引器拖拽測(cè)井儀器在水平段爬行完成測(cè)井工作,到現(xiàn)在需要儀器完成的高精度定位爬行、變徑爬行等復(fù)雜的動(dòng)作。變徑爬行過程中,由于驅(qū)動(dòng)臂長(zhǎng)的改變導(dǎo)致負(fù)載慣量變化[1],這樣原本設(shè)置好的速度環(huán)PI參數(shù)可能將不再適用,從而導(dǎo)致系統(tǒng)出現(xiàn)振動(dòng)[2]。因此,轉(zhuǎn)速環(huán)的控制參數(shù)需要根據(jù)負(fù)載轉(zhuǎn)動(dòng)慣量的變化進(jìn)行實(shí)時(shí)調(diào)整[3]。為了提高水平井牽引器驅(qū)動(dòng)系統(tǒng)在變徑爬行中的適用性和提高速度環(huán)控制器的性能,實(shí)時(shí)辨識(shí)系統(tǒng)轉(zhuǎn)動(dòng)慣量是十分必要的。
目前學(xué)術(shù)界主流的轉(zhuǎn)動(dòng)慣量辨識(shí)算法有離線的加減速辨識(shí)、在線的基于梯度校正辨識(shí)算法[4]和三階最小二乘轉(zhuǎn)動(dòng)慣量辨識(shí)算法[5]。離線的加減速辨識(shí)算法簡(jiǎn)單,但是受限于給定指令反饋計(jì)算的延遲以及外部工況變化等因素,實(shí)際使用場(chǎng)景較為受限,不太適合牽引器的現(xiàn)場(chǎng)使用,在線基于梯度校正辨識(shí)算法和三階最小二乘轉(zhuǎn)動(dòng)慣量辨識(shí)算法雖然可以很好地實(shí)現(xiàn)動(dòng)態(tài)慣量辨識(shí)但是引入了多階矩陣運(yùn)算,增大了算法復(fù)雜度,不利于在現(xiàn)有的硬件平臺(tái)實(shí)現(xiàn)。
為解決傳統(tǒng)轉(zhuǎn)動(dòng)慣量辨識(shí)方法的實(shí)際工況受限、辨識(shí)收斂時(shí)間長(zhǎng)和有效數(shù)據(jù)選擇復(fù)雜等問題,筆者提出了一種基于最小二乘法自動(dòng)數(shù)據(jù)篩選的在線轉(zhuǎn)動(dòng)慣量辨識(shí)方法,并引入了遺忘因子、置信度函數(shù),有效地提高了轉(zhuǎn)動(dòng)慣量的在線辨識(shí)速度和準(zhǔn)確度,減小了算法的計(jì)算量。另外,該方法可以實(shí)現(xiàn)伺服驅(qū)動(dòng)器的轉(zhuǎn)速環(huán)控制器參數(shù)自整定。
1 算法設(shè)計(jì)
忽略電機(jī)內(nèi)部的機(jī)械摩擦損耗,永磁同步電機(jī)的機(jī)械動(dòng)力學(xué)方程如式(1)所示[6]:
Jsω+Bω=Te-TL
(1)
對(duì)電機(jī)的機(jī)械動(dòng)力學(xué)方程進(jìn)行差分離散化處理,得到一階轉(zhuǎn)動(dòng)慣量辨識(shí)遞推結(jié)構(gòu)如下:
(2)
(3)
由于負(fù)載轉(zhuǎn)矩變化相對(duì)機(jī)械轉(zhuǎn)速變化緩慢,可以認(rèn)為其在相鄰2個(gè)采樣間隔內(nèi)負(fù)載轉(zhuǎn)矩沒有發(fā)生變化,并且忽略摩擦系數(shù)的影響,由式(2)和式(3)可得:
(4)
式中:J為系統(tǒng)慣量;ω(k)為電機(jī)在k時(shí)刻的機(jī)械角速度;B為系統(tǒng)摩擦系數(shù);Te(k)為電機(jī)在k時(shí)刻的輸出電磁轉(zhuǎn)矩;TL(k)為電機(jī)在k時(shí)刻的負(fù)載轉(zhuǎn)矩;Ts為慣量辨識(shí)的算法執(zhí)行周期。

(5)
bg(k)=bg(k-1)+m(k)·l(k)[y(k)-ΔTe(k)bg(k-1)]
(6)
(7)
式中:l(k)為第k時(shí)刻的修正增益;p(k)為第k時(shí)刻的協(xié)方差系數(shù);bg(k)為第k時(shí)刻的辨識(shí)量;m(k)為第k時(shí)刻的置信度值。
相對(duì)傳統(tǒng)的最小二乘法辨識(shí)系統(tǒng)慣量的算法,該設(shè)計(jì)引入遺忘因子λ,其作用是減小歷史數(shù)據(jù)對(duì)當(dāng)前數(shù)據(jù)的影響,提高辨識(shí)算法的動(dòng)態(tài)響應(yīng)性能,一般取0.95~0.999。對(duì)獲取的數(shù)據(jù)用式(5)、(6)、(7)進(jìn)行處理,從而得到系統(tǒng)的轉(zhuǎn)動(dòng)慣量辨識(shí)結(jié)果。
2 算法步驟
為了進(jìn)一步提高最小二乘轉(zhuǎn)動(dòng)慣量算法的動(dòng)態(tài)響應(yīng)速度,引入以下新型置信度函數(shù),對(duì)輸入數(shù)據(jù)進(jìn)行自動(dòng)篩選,表達(dá)式如式(8)所示:

(8)
式中:α為置信度系數(shù)。
算法具體步驟如下:
步驟1 獲取驅(qū)動(dòng)系統(tǒng)電磁轉(zhuǎn)矩和反饋機(jī)械角度。電磁轉(zhuǎn)矩通過電流采樣電路和坐標(biāo)變換得到轉(zhuǎn)矩電流iq,再乘以力矩系數(shù)后得到電磁轉(zhuǎn)矩;機(jī)械角度則由編碼器反饋獲得。
步驟2 計(jì)算同步機(jī)械轉(zhuǎn)速和電磁轉(zhuǎn)矩。機(jī)械轉(zhuǎn)矩由機(jī)械角度差分獲得;通過對(duì)獲得電磁轉(zhuǎn)矩進(jìn)行均值濾波來進(jìn)行相位延遲,從而獲得與機(jī)械轉(zhuǎn)速同步的電磁轉(zhuǎn)矩信號(hào)。
步驟3 基于置信度函數(shù)的一階最小二乘轉(zhuǎn)動(dòng)慣量辨識(shí)算法,根據(jù)式(8)計(jì)算置信度函數(shù)值,對(duì)有效數(shù)據(jù)進(jìn)行篩選;利用自動(dòng)數(shù)據(jù)篩選和遞推公式(5)、(6)、(7)對(duì)轉(zhuǎn)動(dòng)慣量進(jìn)行實(shí)時(shí)辨識(shí)。
增加置信度函數(shù)對(duì)輸入數(shù)據(jù)進(jìn)行有效篩選可以確保在使用最小二乘法時(shí)輸入數(shù)據(jù)源的有效性,提高慣量辨識(shí)系統(tǒng)的精度。
3 算法仿真模型
基于前面的理論分析,利用MATLAB/Simulink建立伺服電機(jī)及其轉(zhuǎn)動(dòng)慣量辨識(shí)算法的仿真模型。圖1為電機(jī)驅(qū)動(dòng)的三閉環(huán)整體仿真模型框圖,該模型中除去電機(jī)的基本三環(huán)控制外,還增加了轉(zhuǎn)速轉(zhuǎn)矩信號(hào)同步處理模塊和轉(zhuǎn)動(dòng)慣量辨識(shí)模塊。這2個(gè)模塊的作用是為了辨識(shí)系統(tǒng)慣量的大小,最終目的是為了調(diào)整速度環(huán)相關(guān)的PI參數(shù),實(shí)現(xiàn)牽引器在爬行過程中出現(xiàn)負(fù)載慣量變化時(shí)的穩(wěn)定運(yùn)行。

圖1 電機(jī)驅(qū)動(dòng)系統(tǒng)的三閉環(huán)整體仿真模型
圖2為信號(hào)同步模塊Simulink執(zhí)行框圖,圖2(a)為轉(zhuǎn)矩信號(hào)同步處理,圖2(b)為速度信號(hào)同步處理。對(duì)處理后的同步信號(hào)做了平滑處理(低通濾波)。
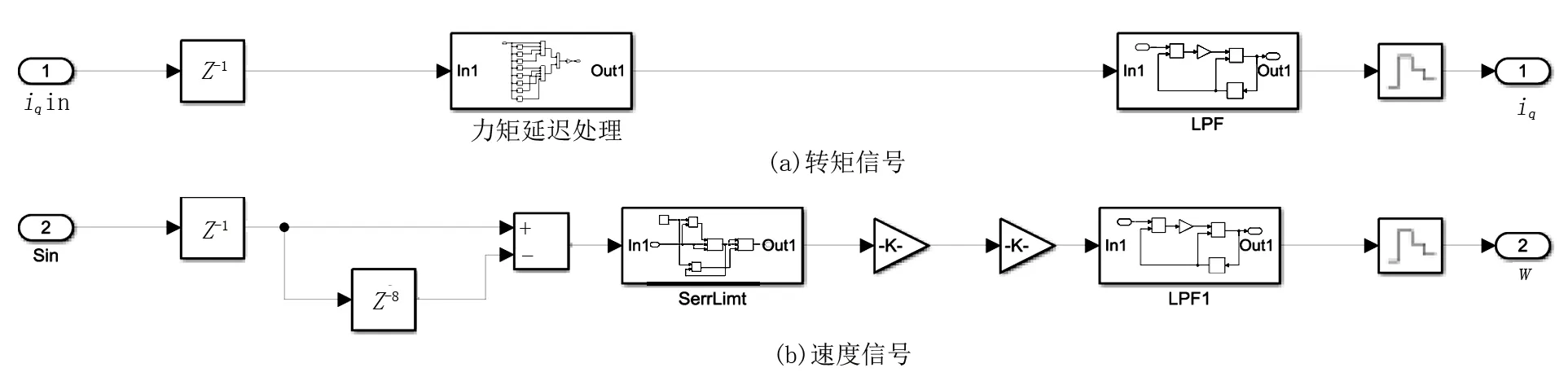
圖2 信號(hào)同步模塊Simulink執(zhí)行框圖
信號(hào)同步處理模塊主要實(shí)現(xiàn)對(duì)輸入的力矩信息和位置信息進(jìn)行同步化處理,得到同步后的力矩和轉(zhuǎn)速。同步轉(zhuǎn)速與轉(zhuǎn)矩作為轉(zhuǎn)動(dòng)慣量辨識(shí)模塊輸入。驅(qū)動(dòng)系統(tǒng)的力矩信息是通過ADC采樣電機(jī)三相相電流,并經(jīng)過坐標(biāo)變換得到轉(zhuǎn)矩電流iq,將iq與電機(jī)力矩系數(shù)相乘即可獲取電機(jī)實(shí)時(shí)轉(zhuǎn)矩;伺服電機(jī)的轉(zhuǎn)速信息通過位置反饋裝置得到。
圖3為帶遺忘因子的最小二乘算法[7]在Simulink中具體執(zhí)行過程,模型輸入為同步后的轉(zhuǎn)矩電流與電機(jī)機(jī)械角速度,來源于圖2同步模塊的輸出。通過輸入值計(jì)算轉(zhuǎn)矩差值和速度的二階差值,然后按照置信度函數(shù)計(jì)算、修正系數(shù)計(jì)算、計(jì)算協(xié)方差系數(shù)和辨識(shí)系統(tǒng)估算量的順序依次計(jì)算,迭代推算出較為精準(zhǔn)的慣量值。
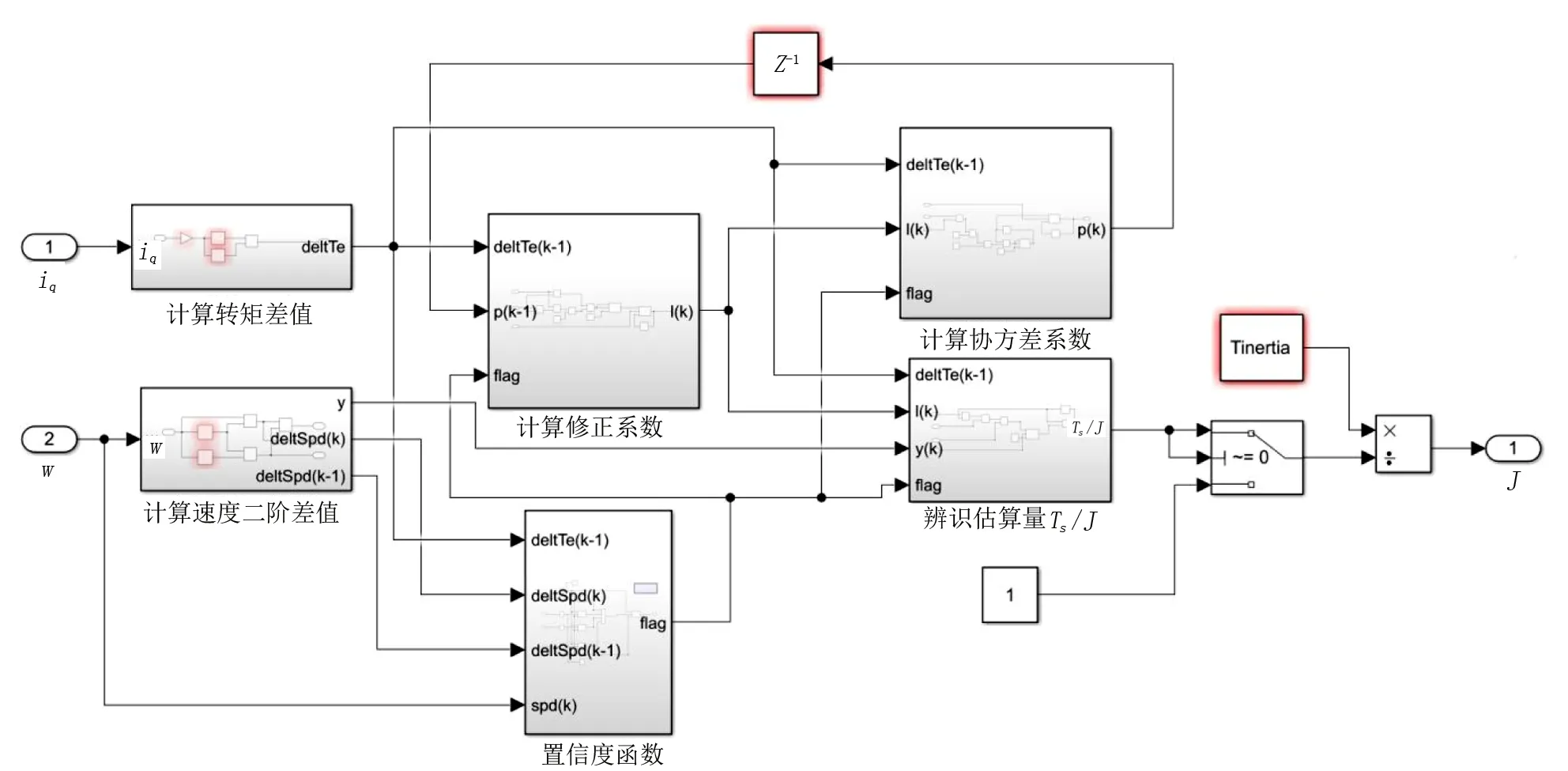
圖3 帶遺忘因子的最小二乘算法Simulink執(zhí)行過程
4 算法硬件平臺(tái)的搭建
該系統(tǒng)的硬件框圖如圖4所示,基于TMS320F28335控制器開發(fā)相對(duì)應(yīng)的FOC電機(jī)的位置轉(zhuǎn)速和電流的三閉環(huán)控制系統(tǒng)軟件[8],通訊接口使用德國(guó)倍福公司改進(jìn)型的工業(yè)以太網(wǎng)總線EtherCat接口[9,10],該接口有效地解決了傳統(tǒng)現(xiàn)場(chǎng)總線多機(jī)通訊時(shí)候的延時(shí)問題,可以更好地滿足牽引器在多電機(jī)驅(qū)動(dòng)時(shí)候的同步性[11-13]。
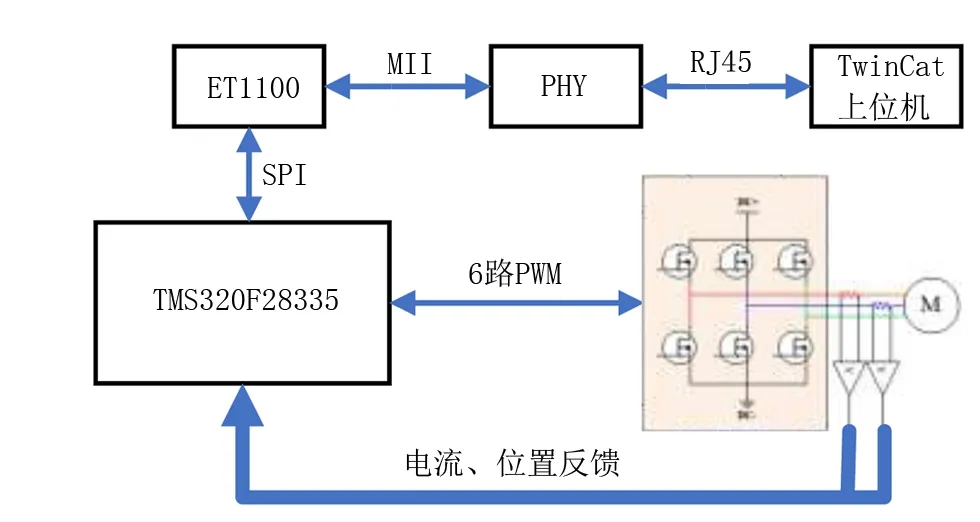
圖4 控制系統(tǒng)硬件實(shí)現(xiàn)框圖
在MCU應(yīng)用層軟件中配置好PDO實(shí)現(xiàn)轉(zhuǎn)速、電流、轉(zhuǎn)動(dòng)慣量等相關(guān)參數(shù);主站軟件開發(fā)使用VS2015軟件(在其基礎(chǔ)上安裝倍福公司開發(fā)的Twincat3.0組件),使用插件中軟PLC編程,利用Scope插件實(shí)現(xiàn)PDO報(bào)文的曲線顯示方便對(duì)算法的性能進(jìn)行測(cè)試[14-16]。
轉(zhuǎn)動(dòng)慣量辨識(shí)算法的執(zhí)行周期為電流環(huán)控制周期的20倍(1ms,電流環(huán)控制周期為50μs)。由于CPU電流環(huán)算法中要進(jìn)行park、Clark坐標(biāo)變化、D軸電流環(huán)PI運(yùn)算和Q軸電流環(huán)PI運(yùn)算,這些運(yùn)算需要開銷較多的資源和較長(zhǎng)的時(shí)間,為了讓所添加的慣量辨識(shí)算法不影響電機(jī)本體的FOC算法,故慣量辨識(shí)算法采用狀態(tài)機(jī)的方式實(shí)現(xiàn)。即每50μs計(jì)算部分慣量辨識(shí)算法,20次(1ms)計(jì)算完成一次最小二乘迭代運(yùn)算,慣量在線辨識(shí)算法在DSP 28335控制器中具體執(zhí)行流程圖如圖5所示。
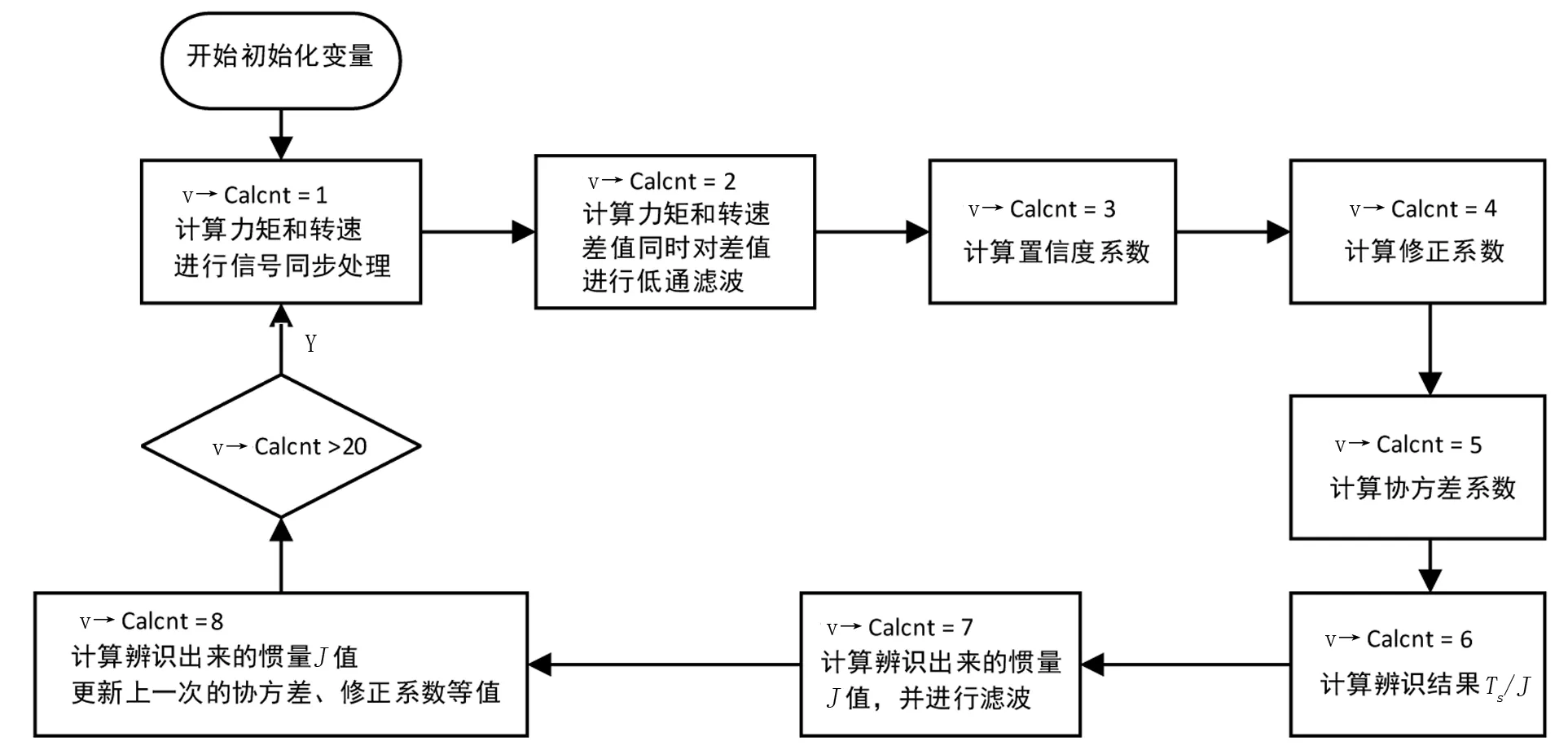
注:v→Calcnt表示為慣量辨識(shí)算法所執(zhí)行的次數(shù)。
待系統(tǒng)開始運(yùn)行后初始化相關(guān)變量,每一次電流環(huán)運(yùn)算結(jié)束后調(diào)用慣量辨識(shí)算法代碼,該部分代碼根據(jù)v→Calcnt的值進(jìn)行不同狀態(tài)運(yùn)算,具體分布如圖5所示,將原本需要耗時(shí)較長(zhǎng)的算法代碼均勻地分解在每一個(gè)電流環(huán)中,這樣可以有效地解決CPU運(yùn)算能力不足的問題,提高了軟件系統(tǒng)的健壯性。
5 系統(tǒng)實(shí)現(xiàn)
圖6為控制系統(tǒng)的是硬件實(shí)驗(yàn)平臺(tái)。包含基于VS2015的TwinCat3.0上位機(jī)調(diào)試系統(tǒng)、伺服驅(qū)動(dòng)控制器、電機(jī)以及電源系統(tǒng)。
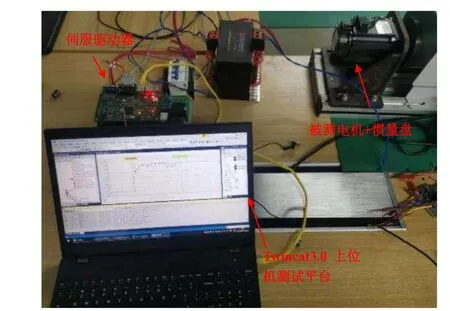
圖6 控制系統(tǒng)硬件實(shí)物
圖7為在Simulink下對(duì)5倍慣量辨識(shí)算法迭代的過程數(shù)據(jù),橫軸為時(shí)間軸,縱軸為慣量辨識(shí)的結(jié)果值,圖7(a)設(shè)置電機(jī)本體慣量為1.66×10-3kg/m2,穩(wěn)定時(shí)結(jié)果1.602×10-3kg/m2,辨識(shí)精度達(dá)到96.5%;圖7(b)設(shè)置電機(jī)本體慣量為6.66×10-3kg/m2,穩(wěn)定時(shí)結(jié)果6.942×10-3kg/m2,辨識(shí)精度達(dá)到95.76%,算法中遺忘因子系數(shù)值為0.99。

圖7 Simulink慣量辨識(shí)結(jié)果圖
圖8為通過EtherCat接口在硬件平臺(tái)下監(jiān)視慣量辨識(shí)的過程數(shù)據(jù)曲線,數(shù)據(jù)采樣率選擇為1ms每個(gè)點(diǎn),圖8(a)為辨識(shí)一號(hào)慣量盤EtherCat接口打印的過程曲線,圖8(b)為辨識(shí)二號(hào)慣量盤EtherCat接口打印的過程曲線,硬件平臺(tái)上設(shè)置的遺忘因子系數(shù)與仿真相同為0.99。
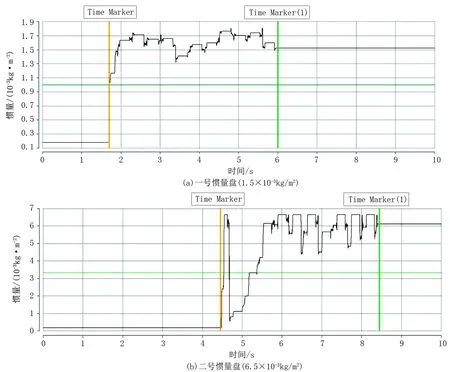
圖8 Ethercat接口在硬件平臺(tái)下監(jiān)視慣量辨識(shí)的過程數(shù)據(jù)曲線
表1為使用EtherCat接口對(duì)不同負(fù)載慣量條件下的慣量值進(jìn)行測(cè)試的結(jié)果。測(cè)試是在310V母線下進(jìn)行,軟件代碼中設(shè)計(jì)遺忘因子的值為0.995,一號(hào)慣量盤為1.5×10-3kg/m2,二號(hào)慣量盤為6.5×10-3kg/m2,電機(jī)本體慣量0.16×10-3kg/m2。可以發(fā)現(xiàn),在硬件平臺(tái)下辨識(shí)結(jié)果與仿真結(jié)果接近。

表1 不同負(fù)載慣量條件下的慣量值進(jìn)行測(cè)試結(jié)果
以上結(jié)果表明,該算法能夠以較快的時(shí)間和相對(duì)較高的精度辨識(shí)出負(fù)載慣量大小,滿足牽引器驅(qū)動(dòng)系統(tǒng)的需求。
6 現(xiàn)場(chǎng)應(yīng)用
利用轉(zhuǎn)動(dòng)慣量辨識(shí)算法理論基礎(chǔ),設(shè)計(jì)制造了牽引器電機(jī)驅(qū)動(dòng)系統(tǒng),配套自適應(yīng)推靠系統(tǒng),完成了整體牽引器的研制。目前該牽引器已在遼河油田投入生產(chǎn)應(yīng)用,2020年完成水平井固井質(zhì)量測(cè)井60余井次,應(yīng)用效果良好。
6.1 曙4-H**水平井
井身結(jié)構(gòu)為直井段3400m,水平段550m,套管尺寸7in。該井水平距離長(zhǎng)、井底仰角大,牽引器不僅要克服電纜與管壁的摩擦阻力,還要克服儀器串重力分力,根據(jù)理論和經(jīng)驗(yàn)確定采用三級(jí)驅(qū)動(dòng),提供總牽引力6000N,能夠完成牽引需求。儀器串自由下放到3500m,遇阻,上提20m啟動(dòng)牽引器輸送。液壓推靠壓力設(shè)置3MPa,總電流控制在900~1100mA,為減小牽引器遇到障礙的沖擊,牽引速度控制在6m/min。儀器牽引到3800m(井斜95°)井段,電流降至900mA以下,表明牽引器出現(xiàn)打滑,此時(shí)慣量辨識(shí)系統(tǒng)扭矩和速度反饋起到提醒作用。調(diào)節(jié)液壓推靠壓力至4MPa,電流增至1300mA以上,牽引速度控制在5m/min左右,扭矩增大,速度下降,此時(shí)慣量辨識(shí)系統(tǒng)扭矩和速度反饋起到保護(hù)驅(qū)動(dòng)電機(jī)作用。井底位置井斜增加至105.76°,提升液壓推靠至 5.2MPa,牽引速度降至4m/min。在整個(gè)牽引過程中,采用了慣量辨識(shí)方法的電機(jī)驅(qū)動(dòng)系統(tǒng),一直在精準(zhǔn)和快速反饋井筒內(nèi)響應(yīng),既能保護(hù)驅(qū)動(dòng)電機(jī)又能提供足夠的牽引力,給操作工程師直觀感受和準(zhǔn)確判斷井下儀器狀況。經(jīng)過6.2h輸送,將測(cè)井儀器輸送到井底15m,順利地將CBL/VDL測(cè)井儀器送至目的層,完成了固井質(zhì)量測(cè)井施工。
6.2 雷99-高H*井
測(cè)量井段4415m,最大井斜102.4°,套管尺寸139.7in,內(nèi)徑121.36mm,儀器MAK-2外徑尺寸110mm。牽引器采用三級(jí)驅(qū)動(dòng),采用上述工作制度,推靠力分別調(diào)為3、4和5MPa,驅(qū)動(dòng)速度做相應(yīng)的調(diào)整。采用慣量辨識(shí)方法的電機(jī)驅(qū)動(dòng)系統(tǒng),在牽引驅(qū)動(dòng)過程中,系統(tǒng)響應(yīng)速度快速,牽引作業(yè)順利,作業(yè)時(shí)間11.3h,將測(cè)井儀器輸送到井底16m,順利地將MAK-2水泥密度儀器送至目的層,完成了水泥密度評(píng)價(jià)測(cè)井。作業(yè)完成后牽引器從井下取出,觀察儀器驅(qū)動(dòng)齒輪磨損較輕,說明推靠力和牽引驅(qū)動(dòng)力間的配合較好。牽引器電機(jī)驅(qū)動(dòng)系統(tǒng)慣量辨識(shí)算法優(yōu)化了牽引力和速度關(guān)系,可以有效避免驅(qū)動(dòng)電機(jī)過載,同時(shí)也減少電機(jī)無效的轉(zhuǎn)動(dòng)和牽引齒輪的磨損,節(jié)約作業(yè)成本。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
